Изобретение относится к области радиолокации и, в частности, к методам восстановления траектории цели в разнесенной радиолокации.
Известны различные устройства для определения параметров движения объекта в разнесенной радиолокации. Одно из них служит для реализации способа, описанного в [1, с. 321] . Устройство состоит из передатчика импульсного сигнала и в удаленной от него на расстояние, равное длине линии базы, приемной позиции. Приемная позиция состоит из антенны, соединенной с приемным устройством, выход которого соединен со входами двух блоков: блока определения поверхности положения (поверхности равных фаз или суммарных дальностей, определяемых суммой дальностей от передатчика до цели и от цели до приемника) и блока определения угловых координат цели. Выходы блоков определения поверхности положения и определения угловых координат цели соединены с конечным блоком устройства - блоком определения траектории цели. Определение координат цели в данном устройстве производится в конечном блоке устройства.
Координаты цели в данном устройстве находятся как точка пересечения прямой линии, проведенной из приемной позиции под углами, измеряемыми в блоке определения угловых координат цели, с поверхностью положения цели. Поверхность положения цели определяется в блоке определения поверхности положения по измеряемой в нем разности времени запаздывания импульсного отраженного от цели и импульсного зондирующего сигналов.
Однако, в зоне наличия "просветного" эффекта, то есть вблизи линии базы, эта разность мала и для ее определения требуется зондирование очень короткими импульсами. Это сильно усложняет генерацию, последующую обработку эхо-сигнала и защиту от пассивных помех. Кроме этого, возникает проблема синхронизации приемной и передающей позиций, решение которой при значительном разнесении передающей и приемной позиций и наличии отражений от подстилающей поверхности требует усложнения аппаратуры и увеличения ее стоимости.
Другое устройство реализует способ, описанный в [2, с.29-30]. Оно состоит из передатчика монохроматического сигнала и в удаленной от него точке на расстоянии, равном длине линии базы, приемной позиции. Приемная позиция состоит из последовательно соединенных антенны, приемника, детектора, осуществляющего детектирование интерференционного сигнала биений, фильтра нижней частоты, блока определения момента времени переходов напряжения через нуль и блока вычисления траекторных параметров.
Определение траекторных параметров цели в данном устройстве производится путем детектирования суммарного сигнала (суммируются прямой сигнал передатчика и сигнал вторичного излучения объекта), последующего выделения интерференционного сигнала биений, измерения моментов времени переходов его напряжения через нуль и вычисления на основании сделанных измерений параметров траектории. В этом устройстве параметры траектории объекта - скорость его движения, курс, координата точки пересечения проекции его траектории с базовой линией - определяются по результатам измерений длительностей нескольких последовательных периодов интерференционного сигнала биений.
Недостатком устройств, реализованных по этому способу, является невысокая точность получаемых оценок и наличие неоднозначности определения этих параметров. Первое объясняется тем, что вблизи линии базы, где производятся измерения, поверхности положения (поверхности равных фаз или равных суммарных дальностей) представляют собой эллипсоиды, сильно вытянутые вдоль оси координат, параллельной линии базы. Наличие неоднозначности связано с симметрией эллипсоидов положения относительно перпендикулярной к линии базы плоскости, проведенной через ее середину. В связи с этим две различные траектории, симметричные относительно упомянутой плоскости, порождают одинаковые и неразличимые интерференционные сигналы биений.
Указанного недостатка лишены устройства реализующие способ [3]. Устройство, реализующее этот способ, содержит передающую позицию, излучающую монохроматический сигнал, и в удаленной от нее точке приемную позицию, осуществляющую прием зондирующего сигнала и сигнала вторичного излучения объекта, выделение из них путем детектирования интерференционного сигнала биений (сигнала низкой частоты), измерение частоты этого сигнала, например, путем измерения моментов времени переходов его напряжения через нуль, одновременно осуществляющую измерение направления прихода интерференционного сигнала, например, моноимпульсным методом по соотношению амплитуд интерференционного сигнала в парциальных каналах, фазовым способом или сканированием луча антенны по максимуму значений огибающей сигнала на выходе фильтра низкой частоты [1, с.274-310; 4, с.388-406], и определение момента времени, когда частота этого сигнала равна нулю. По измеренным величинам параметры траектории определяют как координаты точки пересечения поверхности положения, определяемой по значениям частоты интерференционного сигнала биений и момента времени, когда частота этого сигнала равна нулю, и линии направления прихода интерференционного сигнала.
Основным недостатком этого устройства является невозможность определения местоположения цели до пересечения ею линии базы.
В устройстве [5] этот недостаток отсутствует. Данное устройство содержит передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством (включающим в себя хотя бы один канал, состоящий из последовательного соединения приемника, детектора и фильтра низкой частоты), выход которого соединен со входами блока измерения доплеровской частоты и входами блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, один из входов которого соединен с выходом блока измерения доплеровской частоты, второй вход - с выходом блока измерения направления прихода интерференционного сигнала, а выход блока экстраполяции измеряемых параметров соединен со входом блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, один из входов которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, второй вход - с выходом блока экстраполяции измеряемых параметров, а выход с одним из входов конечного блока устройства - блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, при этом выходом всего устройства является выход блока вычисления траекторных параметров.
Данное устройство взято в качестве прототипа. Устройство, взятое в качестве прототипа, характеризуется значительным ростом ошибки измерения дальности до цели в окрестности линии базы, что связано с высокой чувствительностью измерений к отклонениям угловой координаты и отклонениям поверхности положения в непосредственной близости от линии базы, а также недостаточно высокой точностью определения местоположения цели по сравнению с потенциально достижимой точностью.
Предлагаемое устройство позволяет устранить этот недостаток. Это достигается тем, что в устройство, взятое в качестве прототипа и содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, выход которого соединен со входами блока измерения доплеровской частоты и входами блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, один вход которого соединен с выходом блока измерения доплеровской частоты, второй вход - с выходом блока измерения направления прихода интерференционного сигнала, а выход блока экстраполяции измеряемых параметров соединен со входом блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, соединенного одним своим входом с выходом блока вычисления момента времени пересечения целью линии базы, и вторым - с выходом блока экстраполяции измеряемых параметров, а выходом с одним из входов конечного блока устройства - блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, введены блок определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и блок конечного вычисления траекторных параметров, причем один вход блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала соединен с выходом блока измерения направления прихода интерференционного сигнала, второй вход - с выходом блока измерения доплеровской частоты, а выход соединен с одним из четырех входов блока конечного вычисления траекторных параметров, другие три входа которого раздельно соединены с выходами блока измерения направления прихода интерференционного сигнала, блока измерения доплеровской частоты и блока вычисления траекторных параметров, при этом выходом всего устройства является выход блока конечного вычисления траекторных параметров.
Применение новых блоков и связей позволило увеличить точность определения местоположения цели, особенно в момент пересечения ею линии базы. Это достигается за счет осуществления в вводимых блоках дополнительных преобразований над первичными измеряемыми параметрами (частоты Доплера и направления прихода интерференционного сигнала) и предварительной оценкой координат цели, получаемых в блоках, заимствованных из устройства-прототипа.
Сравнение предложенного технического решения с другими известными источниками патентной и научно-технической документации показывают, что в них отсутствуют технические решения, позволяющие достигнуть поставленного в изобретении технического результата - определения местоположения цели с точностью, близкой к потенциально достижимой на протяжении всей траектории.
Изложенная сущность будет понятна из нижеприведенных графических материалов.
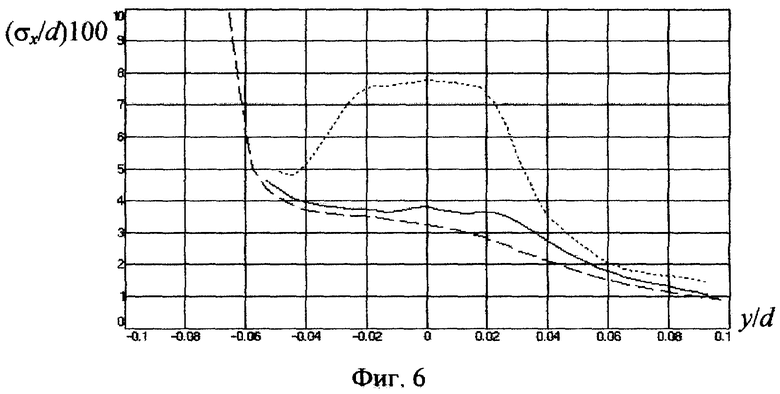
На фиг. 1 представлена функциональная схема заявляемого устройства, когда определение направления прихода интерференционного сигнала осуществляется моноимпульсным методом с двумя пространственными каналами. На чертеже введены обозначения:
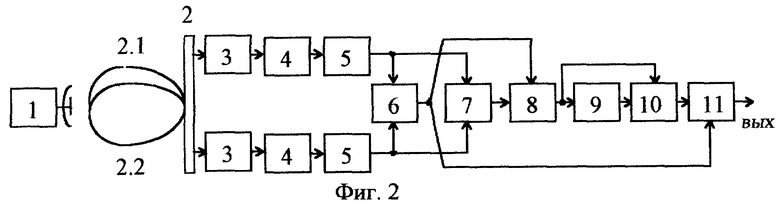
1 - передающая позиция;
2 - антенна приемной позиции (в данном случае формирует два луча 2.1 и 2.2);
3 - приемник;
4 - детектор;
5 - ФНЧ;
6 - блок измерения направления прихода интерференционного сигнала (α);
7 - блок измерения доплеровской частоты (f∂);
8 - блок экстраполяции измеряемых параметров (зависимостей частоты Доплера и угловой координаты цели от времени);
9 - блок вычисления момента времени пересечения целью линии базы;
10 - блок определения поверхности положения;
11 - блок вычисления траекторных параметров;
12 - блок определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала;
13 - блок конечного вычисления траекторных параметров.
На фиг. 2 представлена функциональная схема устройства-прототипа с определением направления прихода интерференционного сигнала моноимпульсным методом с двумя пространственными каналами, где использованы те же, что и на фиг. 1, обозначения.
На фиг. 3 приведены основные геометрические соотношения для предлагаемого устройства, показаны связанная с ним декартовая система координат xOy и возможная движущаяся цель. На фиг. 3 обозначено:
П - передающая позиция (расположена в точке с координатами (d; O));
Пр - приемная позиция (расположена в точке с координатами (O;O)); вектор, начало которого расположено в точке расположения приемной позиции (O,O), а конец - в точке расположения цели (x, y),
вектор, начало которого расположено в точке расположения приемной позиции (O,O), а конец - в точке расположения цели (x, y), вектор, начало которого расположено в точке расположения передающей позиции (d, O), а конец - в точке расположения цели (x, y),
вектор, начало которого расположено в точке расположения передающей позиции (d, O), а конец - в точке расположения цели (x, y),
d - расстояние от передающей позиции до приемной позиции (базовое расстояние);
α - угловая координата цели; бистатический (двухпозиционный) угол между векторами
бистатический (двухпозиционный) угол между векторами 
x, y - координаты цели; вектор скорости цели;
вектор скорости цели; проекции вектора скорости цели
проекции вектора скорости цели  на соответствующие координатные оси;
на соответствующие координатные оси;
ϕ - угол наклона траектории цели к линии базы;
xП - точка пересечения целью линии базы.
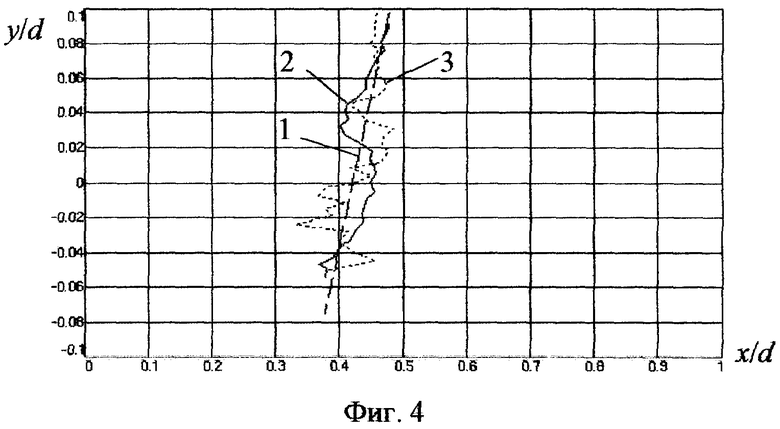
На фиг. 4 - 5 приведены графики, иллюстрирующие результаты моделирования работы предлагаемого устройства. По горизонтальной оси отложена координата "x" движения цели в относительных единицах к длине линии базы системы - расстоянию между передающей и приемной позиций. По вертикальной оси отложена координата "y" движения цели, также в относительных единицах к величине базового расстояния системы. При этом считается, что передающая позиция расположена в точке с координатами (d; O), а приемная - в точке (O;O)). На фиг. 4 показана отдельная реализация траектории, построенная по измеренным значениям α, f∂ и вычисленным в устройстве траекторным параметрам (позиция 2). Позиция 1 - на фиг. 4 и фиг. 5 - истинная траектория движения цели в плоскости xOy. На фиг. 5 показаны границы областей среднеквадратических ошибок σr, рассчитанные по 1000 независимым реализациям (позиция 2 на фиг. 4) входных данных для моделирования работы устройства. Позицией 3 на фиг. 4 и фиг. 5 обозначены аналогичные графики, но построенные по результатам моделирования работы устройства-прототипа.
На фиг. 6 изображены зависимости нормированных к длине линии базы d среднеквадратических ошибок определения координаты x в зависимости от нормированного значения ординаты y цели, рассчитанные для той же траектории движения (фиг. 5) с параметрами: xП/d= 0,425, ϕ = 60o.
Сплошной линией изображены среднеквадратические ошибки, полученные по результатам моделирования работы заявляемого устройства для 1000 независимых реализаций входных данных (позиция 2 на фиг. 4). Линией в виде коротких штрихов изображены аналогичные графики для устройства прототипа. Линией с длинными штрихами изображены графики потенциально достижимых среднеквадратических ошибок определения координат цели в тех же относительных единицах и для тех же условий, что и остальные графики.
Предлагаемое устройство с определением направления прихода интерференционного сигнала моноимпульсным методом с двумя пространственными каналами (см. фиг. 1) состоит из передающей позиции 1 и, в удаленной от источника излучения точке, приемной позиции. Приемная позиция, в свою очередь, состоит из антенны 2 приемной позиции, имеющей два выхода, каждый из которых соединен со входом последовательного соединения приемника 3, детектора 4 и ФНЧ 5. Выходы ФНЧ 5 раздельно соединены с соответствующими входами блока 6 измерения направления прихода интерференционного сигнала и блока 7 измерения доплеровской частоты. Выход блока 7 измерения доплеровской частоты f∂ соединен последовательно с блоками: блоком 8 экстраполяции измеряемых параметров, блоком 9 вычисления момента времени пересечения целью линии базы, блоком 10 определения поверхности положения, блоком 11 вычисления траекторных параметров и блоком 13 конечного вычисления траекторных параметров. Другие три входа блока 13 конечного вычисления траекторных параметров раздельно соединены с выходом блока 6 измерения направления прихода интерференционного сигнала, выходом блока 7 измерения доплеровской частоты и выходом блока 12 определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала, входы которого в свою очередь соединены с выходами блока 6 измерения направления прихода интерференционного сигнала и блока 7 измерения доплеровской частоты. При этом выход блока 6 измерения направления прихода интерференционного сигнала соединен со вторым входом блока 8 экстраполяции измеряемых параметров и вторым входом блока 11 вычисления траекторных параметров, а выход блока 8 экстраполяции измеряемых параметров со вторым входом блока 10 определения поверхности положения. Выход блока 13 конечного вычисления траекторных параметров является выходом всего устройства.
Предложенное устройство работает следующим образом. Допустим, что зондирующий сигнал непрерывный (немодулированный), а приемная антенна 2 имеет парциальные каналы в азимутальной плоскости 2.1 и 2.2 (фиг. 1). При этих условиях в устройстве обеспечивается возможность измерения двух параметров сигнала, отраженного от цели: доплеровской частоты по частоте биений, образуемых при сложении отраженного сигнала от цели и прямого сигнала передатчика (эта операция осуществляется в блоке 7 измерения доплеровской частоты) и угловой координаты цели путем сравнения амплитуд биений с одинаковой частотой Доплера в парциальных каналах (блок 6 измерения направления прихода интерференционного сигнала).
Рассмотрим возможность определения по измеренным значениям частоты Доплера f∂(t) и угловой координаты цели α(t) параметров движения цели в заявляемом устройстве.
Условно работу всего устройства можно разделить на два этапа. На первом из них происходит предварительная оценка местоположения цели (осуществляется в блоках 1 - 11), а на втором - уточнение ее в соответствии с критерием максимального правдоподобия (осуществляется в блоках 12 -13).
Кратко поясним основные моменты нахождения начальной оценки траекторных параметров цели в блоках 1-11. Как известно [1, с.326; 2,с.30; 6, с. 199], существует следующая зависимость частоты Доплера от траектории цели:
где r(t) и r1(t) - зависимости модулей векторов  движущейся цели от времени (фиг. 3);
движущейся цели от времени (фиг. 3);
RΣ(t) - суммарное расстояние передатчик - цель - приемник;
λ - длина волны излучения.
Интегрирование (1) при знании соответствующей постоянной позволяет получить зависимость RΣ(t). Постоянная интегрирования однозначно определяется в момент времени tП пересечения целью линии базы, поскольку в этот момент частота Доплера и азимут цели обращаются в нуль, а суммарная дальность равна базе системы (RΣ(tп) = d). Таким образом, до пересечения целью линии базы в блоке 8 производится экстраполяция доплеровской частоты для приближенного определения зависимости f∂(t) от времени и определение в блоке 9 момента времени пересечении целью линии базы (для этого может также использоваться и экстраполяция угловой координаты). Затем в блоке 10 на основании (1) производится оценка суммарной дальности для текущего момента наблюдения RΣ(t). После пересечения целью линии базы оценка RΣ(t) может быть получена путем непосредственного интегрирования измеренной зависимости f∂(t) от момента tП до текущего момента наблюдения за целью.
По результатам измерения суммарной дальности RΣ(t) и измерения угловой координаты начальная оценка координат цели (дальности до цели) может быть получена как точка пересечения поверхности положения и луча, проведенного из приемной позиции под измеряемыми углами прихода волны, в соответствии со следующим выражением для дальности до цели:
Легко видеть, что знание дальности до цели позволяет определить как декартовые координаты цели (фиг. 3), так и скорость ее движения при известных значениях дальности для двух разных моментов времени.
Более подробно процесс получения начальной оценки траекторных параметров цели в результате работы блоков 1-11 описан в [5]. Для краткого пояснения работы устройства на втором этапе (этапе получения более точной оценки) положим, что измерения первичных параметров интерференционного сигнала - доплеровской частоты f∂ и угловой координаты α - производятся в дискретные моменты времени через равные временные интервалы T, и имеется n последовательных измерений этих параметров, произведенных в блоке 7 измерения доплеровской частоты и блоке 6 измерения направления прихода интерференционного сигнала соответственно. Для удобства эти первичные измерения можно представить в виде вектора
где T - знак транспонирования;
^ - обозначает оценку измеряемой величины; оценки в i-й момент времени t1 = iT, соответствующий i-му интервалу первичных измерений ((i - 1)T, iT),
оценки в i-й момент времени t1 = iT, соответствующий i-му интервалу первичных измерений ((i - 1)T, iT), 
 оценки в текущий момент наблюдения tn = nT, соответствующий n-му интервалу первичных измерений ((n - 1)T, nT).
оценки в текущий момент наблюдения tn = nT, соответствующий n-му интервалу первичных измерений ((n - 1)T, nT).
При движении цели по линейной траектории с постоянной скоростью V в течение интервала времени nT, от момента начала измерения t1 до момента наблюдения tn, траекторные параметры могут быть полностью описаны вектором
где xn,yn,Vx= Vcos(ϕ), Vy= Vsin(ϕ) - значения декартовых координат цели и скоростей их изменения в момент наблюдения tn (фиг. 3).
Местоположение цели в любой другой момент времени ti можно определить по вектору параметров 
Маневрирование цели может быть учтено путем ограничения количества пар n измерений первичных параметров, используемых для оценки вектора параметров 
Задачей вводимых блоков является наиболее точное определение вектора траекторных параметров  по вектору измерений
по вектору измерений  Для этого производится уточнение предварительной оценки вектора траекторных параметров в соответствии с оптимальными критериями теории оценивания.
Для этого производится уточнение предварительной оценки вектора траекторных параметров в соответствии с оптимальными критериями теории оценивания.
Например, в случае использования метода максимального правдоподобия, возможно использование следующей итерационной процедуры [7, с.369]:
Здесь m - номер итерации, m = 0,1...; - начальное приближение, полученное в результате работы предшествующим вновь вводимым блокам (а именно, по результатам работы блоков 2-11 приемной позиции).
- начальное приближение, полученное в результате работы предшествующим вновь вводимым блокам (а именно, по результатам работы блоков 2-11 приемной позиции).

нелинейная векторная функция, определяемая следующими простыми зависимостями, связывающими точные значения измеряемых первичных параметров f∂1 и αi с точными значениями траекторных параметров:

прямоугольная [2n x 4] матрица, каждая строка которой - градиент одной из функций  по вектору
по вектору 
Ve - корреляционная матрица ошибок первичных измерений, размером [2n х 2n] (получаемые в блоках 6, 7 оценки угловой координаты и частоты Доплера несмещенные).
На практике, дискретные измерения первичных параметров производятся через интервал T, равный или превышающий интервал корреляции оценок, поэтому матрица Ve - диагональная и содержит на главной диагонали значения σ
Поиск оценок среднеквадратических отклонений ошибок измерения доплеровской частоты и угловой координаты, σf и σα можно производить также как и ранее при экстраполяции первичных измерений (производимой в блоке 8 устройства-прототипа и предлагаемого устройства), используя аппроксимацию измеренных зависимостей доплеровской частоты  и угловой координаты
и угловой координаты 
Для этого можно использовать, как и ранее, то обстоятельство, что изменения частоты Доплера и угловой координаты от времени для типичных целей, обнаруживаемых и сопровождаемых предлагаемым устройством, могут быть с высокой степенью точности аппроксимированы полиномами с небольшим числом коэффициентов.
При полиномиальной модели измерений параметров аппроксимированная зависимость, например для частоты Доплера, будет представлена в виде:
f∂,МОД(t) = co+...+cм-1tм-1+cмtм, (10)
где М - порядок полинома.
В матричном виде уравнение (10) для нескольких последовательных моментов времени t1, t2,..., tn-1, tn можно записать
где
n - мерный вектор доплеровской частоты;
n - число измерений, по которым производится аппроксимация,


μ(n) - в данном случае ошибки измерения f∂. .
Используя (11) и полагая n > М, найдем оптимальные по критерию наименьших квадратов оценки коэффициентов полиномиальной модели (12) [8, с. 238-250]
где B=(Pn TPn)-1Pn T.
Подставив полученные оценки  в (10), получим зависимость
в (10), получим зависимость  аппроксимирующую изменение параметров f∂ и α на отрезке времени [t1, tn]:
аппроксимирующую изменение параметров f∂ и α на отрезке времени [t1, tn]:
где

Таким образом, из полученной зависимости (14) вместо исходных измеряемых параметров  определим их сглаженные (аппроксимированные) значения
определим их сглаженные (аппроксимированные) значения
в дискретные моменты времени t1, t2,...,tn Аналогичным образом по (10) - (15) определяются сглаженные значения угловой координаты
Аналогичным образом по (10) - (15) определяются сглаженные значения угловой координаты 
После определения сглаженных оценок первичных измеряемых параметров значения σf, σα для (9) можно определять как:

Вычисление оценки  с использованием (6) можно считать завершенным, например, если модуль разности между двумя последовательными оценками абсциссы цели меньше определенной константы:
с использованием (6) можно считать завершенным, например, если модуль разности между двумя последовательными оценками абсциссы цели меньше определенной константы:
Таким образом, в каждом из двух парциальных каналов, состоящих из последовательного соединения приемника 3, детектора 4, ФНЧ 5, происходит детектирование и выделение низкочастотного колебания из суммарного сигнала, образуемого за счет интерференции прямого сигнала передатчика 1 и сигнала, отраженного от цели. Далее с выхода параллельных каналов низкочастотное колебание поступает в блок 7 измерения доплеровской частоты и блок 6 измерения направления прихода интерференционного сигнала, в котором при рассматриваемом варианте реализации устройства, угловая координата определяется путем сравнения амплитуд низкочастотного сигнала в каждом из парциальных каналов. По данным, получаемым из блоков 6 измерения направления прихода интерференционного сигнала и блока 7 измерения доплеровской частоты, в блоке 8 экстраполяции измеряемых параметров, блоке 9 вычисления момента времени пересечения целью линии базы, блоке 10 определения поверхности положения и блоке 11 вычисления траекторных параметров происходит, как и в устройстве-прототипе, в соответствии с (1) - (2) вычисление предварительной оценки параметров движения цели  При этом блоки 8-11 могут быть выполнены на основе схем вычитания, делителей, перемножителей, сумматоров (т.е. типовых радиотехнических элементах), аналогично блокам счетно-решающего устройства, схемы вычитания, схемы сравнения амплитуд [1, с.297-300].
При этом блоки 8-11 могут быть выполнены на основе схем вычитания, делителей, перемножителей, сумматоров (т.е. типовых радиотехнических элементах), аналогично блокам счетно-решающего устройства, схемы вычитания, схемы сравнения амплитуд [1, с.297-300].
Данные, получаемые из блоков 6 измерения направления прихода интерференционного сигнала и блока 7 измерения доплеровской частоты, поступают также в блок 12 определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала, где происходит оценка статистических характеристик ошибок измерения поступающих первичных параметров (оценка элементов корреляционной матрицы ошибок измерения первичных параметров Ve). Как отмечалось ранее, на практике достаточно определить дисперсии ошибок измерения доплеровской частоты и угловой координаты σ
Полученная в блоке 11 вычисления траекторных параметров и блоке 12 определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала информация поступает в конечный блок устройства - блок 13 конечного вычисления траекторных параметров. Помимо данных из блоков 11 и 12, в конечный блок 13 поступают данные, получаемые из блока 6 измерения направления прихода интерференционного сигнала и блока 7 измерения доплеровской частоты. На основе поступивших данных в блоке 13 конечного вычисления траекторных параметров происходит уточнение по (6) начальной оценке параметров движения цели  получаемой в блоке 11 вычисления траекторных параметров.
получаемой в блоке 11 вычисления траекторных параметров.
Как показали проведенные исследования, потенциальная точность определения параметров движения цели практически достигается при использовании малого числа итераций (6). Поэтому, при реализации рассматриваемого блока, достаточно ограничиться единичным решением системы уравнений (6) и определить  При этом блок 13 конечного вычисления траекторных параметров выполняет функциональные преобразования входного колебания, описываемые в данном случае системой (6). Эти функциональные преобразования также могут быть представлены в виде последовательности операций, состоящей из комбинации простых арифметических действий (сложения, вычитания, умножения и деления), связывающих выходное напряжение с входным сигналом.
При этом блок 13 конечного вычисления траекторных параметров выполняет функциональные преобразования входного колебания, описываемые в данном случае системой (6). Эти функциональные преобразования также могут быть представлены в виде последовательности операций, состоящей из комбинации простых арифметических действий (сложения, вычитания, умножения и деления), связывающих выходное напряжение с входным сигналом.
В общем случае блок 13 конечного вычисления траекторных параметров может быть выполнен на типовых радиотехнических элементах: схемах вычитания, делителях, перемножителях, сумматорах, схемах сравнения и линиях задержек; либо реализован программно на специальной вычислительной машине.
Основные операции, производимые в заявляемом устройстве и отличительные от прототипа, сводятся к следующим: вычисление статистических характеристик ошибок измерения доплеровской частоты и угловой координаты, уточнение предварительной оценки параметров движения цели, например согласно критерию максимума правдоподобия.
Сущность изобретения останется неизменной при любой реализации блока измерения направления прихода интерференционного сигнала. Измерение угла прихода отраженного от цели сигнала может производиться также, например, фазовым способом или сканированием луча антенны по максимуму значений огибающей сигнала на выходе фильтра низкой частоты. Эти возможные варианты устройства на фигурах не показаны.
В зависимости от используемого метода определения направления прихода интерференционного сигнала блок 6 измерения направления прихода интерференционного сигнала может быть выполнен на основе различных блоков. Например, при фазовом моноимпульсном методе измерения угловых координат блок 6 может представлять собой фазометр [1, с.300], при использовании амплитудного моноимпульсного метода блок 6 может быть выполнен на основе схемы сравнения амплитуд или схемы вычитания [1, с.297]. Если в качестве блока 6 измерения направления прихода интерференционного сигнала используется, например, вычитатель или фазометр, то устройство содержит несколько пространственных каналов, выход каждого из которых подается на вход вычитателя или фазометра.
Блок 7 измерения доплеровской частоты может представлять собой, например, низкочастотный измеритель частоты переменного напряжения (частотомер) или реализован как блок определения моментов перехода напряжения через нуль. Возможные способы реализации вводимых в устройство новых блоков указаны ранее при описании работы устройства.
Используемые в изобретении блоки могут быть выполнены на основе стандартных, типовых радиотехнических элементов.
Эффективность предлагаемого устройства оценивалась путем математического моделирования. На фиг. 4 - 6 представлены соответствующие графики, выполненные для примера по результатам моделирования одной траектории. Конечное (в блоке 13) определение координат в рассмотренном случае осуществлялось с учетом всех первичных измерений, начиная с момента обнаружения и сопровождения цели.
Графики на фиг. 4 - 6 рассчитаны для системы с параметрами d = 40 км, λ = 1 м, T = 1,024 с. Значения среднеквадратических ошибок измерения первичных параметров на всех интервалах первичных измерений принимались равными σf= 2 Гц, σα= 0,5°, скорость цели V = 200 м/с.
Проведенный анализ точности определения координат цели предлагаемым устройством при других условиях показал, что точность измерения дальности до цели увеличивается по сравнению с устройством-прототипом практически на всем протяжении траектории. При работе системы с вышеуказанными параметрами (взятыми для моделирования) происходит увеличение точности определения дальности в 2-3 раза по сравнению с устройством-прототипом.
Потенциальная точность на фиг. 6 определялась информационной матрицей Фишера [7, с. 332-334; 8, с.204-205]. Для принятой на интервале измерения параметров движения цели ΔT = (n-1)T модели движения цели (5), и принятых статистических характеристиках ошибок измерения первичных параметров - доплеровской частоты и угловой координаты (9) элементы матрицы Фишера:
где  функция правдоподобия;
функция правдоподобия;
xl, xk - элементы вектора  (x1 = xn, x2 = yn, x3 = Vx, x3 = Vy - значения декартовых координат цели и скоростей их изменения в момент наблюдения tn (4));
(x1 = xn, x2 = yn, x3 = Vx, x3 = Vy - значения декартовых координат цели и скоростей их изменения в момент наблюдения tn (4));
М{.} - знак статистического усреднения.
Дисперсии  ошибок определения параметров траектории находятся как диагональные элементы матрицы, обратной матрице Фишера с элементами (18).
ошибок определения параметров траектории находятся как диагональные элементы матрицы, обратной матрице Фишера с элементами (18).
Моделирование показало, что предлагаемое устройство позволяет определять местоположение цели с точностью, близкой к потенциально достижимой на протяжении всей траектории движения цели в зоне обнаружения.
Работоспособность устройства обеспечивается за счет применения в нем известных и новых блоков, реализация которых не требует дополнительного изобретательского творчества.
Литература
1. Теоретические основы радиолокации / Ширман Я.Д., Голиков В.Н., Бусыгин И.Н. и др.; Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970. - 560 с.
2. Черняк В.С., Заславский Л.П., Осипов Л.В. Многопозиционные радиолокационные станции и системы // Зарубежная радиоэлектроника. - 1987. - N 1. - С. 9-30.
3. Бляхман А.Б., Самарин А.В. Радиолокационный способ определения параметров движения объекта: Заявка на изобретение N 98101955/ 09(002027) с приоритетом от 02.02.98г. Патент N 2133480.
4. Финкельштейн М.И. Основы радиолокации. - М.: Сов. Радио, 1973.
5. Бляхман А. Б., Рындык А.Г., Ковалев Ф.Н. Устройство для определения параметров движения объекта: Заявка на изобретение N 97117868/09(019049) с приоритетом от 29.10.97г. Патент N 2124220.
6. Справочник по радиолокации: В 4 т. / Под ред. М. Сколника; пер. с англ. под общ. ред. К.Н. Трофимова. - М.: Сов. радио, 1978. - Т. 4.- 375 с.
7. Черняк В.С. Многопозиционная радиолокация. - М.: Радио и связь, 1993. - 416 с.
8. Сейдж Э., Мелс Дж. Теория оценивания и ее применение в связи и управлении. - М.: Связь, 1976. - 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1999 |
|
RU2168740C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 2013 |
|
RU2534220C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2012 |
|
RU2515562C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |


Изобретение относится к области радиолокации, в частности к методам восстановления траектории цели в разнесенной радиолокации. Технический результат - повышение точности определения местоположения объекта. Для достижения вышеуказанного результата в устройство, содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, выход которого соединен со входами блока измерения доплеровской частоты и входами блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, один вход которого соединен с выходом блока измерения доплеровской частоты, второй вход - с выходом блока измерения направления прихода интерференционного сигнала, а выход соединен со входом блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, соединенного одним своим входом с выходом блока вычисления момента времени пересечения целью линии базы, вторым - с выходом блока экстраполяции измеряемых параметров, а выходом - с одним из входов блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, согласно изобретению, введены два блока: блок определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и блок конечного вычисления траекторных параметров, при этом один вход, блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала соединен с выходом блока измерения направления прихода интерференционного сигнала, второй вход - с выходом блока измерения доплеровской частоты, а выход соединен с одним из четырех входов блока конечного вычисления траекторных параметров, другие три входа которого раздельно соединены с выходами блока измерения направления прихода интерференционного сигнала, блока измерения доплеровской частоты и блока вычисления траекторных параметров. Выходом всего устройства является выход блока конечного вычисления траекторных параметров. 6 ил.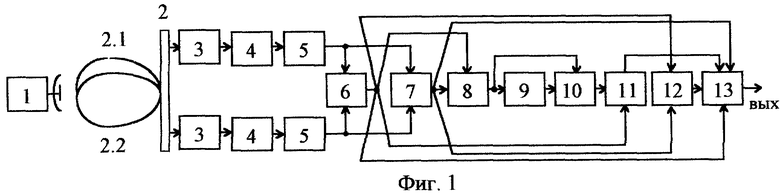
Устройство для определения параметров движения объекта, содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, выход которого соединен со входами блока измерения доплеровской частоты и входами блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, один вход которого соединен с выходом блока измерения доплеровской частоты, второй вход - с выходом блока измерения направления прихода интерференционного сигнала, а выход соединен со входом блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, соединенного одним своим входом с выходом блока вычисления момента времени пересечения целью линии базы, вторым - с выходом блока экстраполяции измеряемых параметров, а выходом с одним из входов блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, отличающееся тем, что в него введены блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и блок конечного вычисления траекторных параметров, причем один вход блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала соединен с выходом блока измерения направления прихода интерференционного сигнала, второй вход - с выходом блока измерения доплеровской частоты, а выход соединен с одним из четырех входов блока конечного вычисления траекторных параметров, другие три входа которого раздельно соединены с выходами блока измерения направления прихода интерференционного сигнала, блока измерения доплеровской частоты и блока вычисления траекторных параметров, при этом выходом всего устройства является выход блока конечного вычисления траекторных параметров.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| US 4001823 A, 04.01.1977 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИПЕПТИДОВ В БЕСКЛЕТОЧНОЙ СИСТЕМЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2148649C1 |
| US 5774087 A, 30.06.1998 | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |

