Изобретение относится к радиолокации и может быть использовано в РЛС с непрерывным зондирующим сигналом, в частности в бистатических радиолокационных комплексах по методу локации “на просвет”.
Устройства, осуществляющие обнаружение движущихся объектов, рассмотрены в [1-3]. Устройство, реализующее способ определения параметров движения объекта, предложенное в [3], состоит из разнесенных в пространстве передающей системы и приемной системы, состоящей из последовательного соединения антенны, приемника, детектора и фильтра низкой частоты (ФНЧ), выход которого подключен к блоку измерения направления прихода интерференционного сигнала и блоку измерения доплеровской частоты, подключенному к блоку определения поверхности положения, который в свою очередь подключен к входу блока вычисления траекторных параметров, ко второму входу которого подключен выход блока измерения направления прихода интерференционного сигнала, а выход блока вычисления траекторных параметров является выходом всего устройства. Блоки измерения направления прихода интерференционного сигнала, измерения доплеровской частоты, определения поверхности положения и блок вычисления траекторных параметров вместе со своими связями являются решающим устройством.
Системы с таким принципом выделения сигнала движущейся цели относятся к РЛС с внешней когерентностью [4, с.146]. Несомненным достоинством такого подхода является возможность автономной работы приемной позиции, в которой нет необходимости использовать когерентное напряжение передатчика. Это в свою очередь приводит к существенному упрощению и удешевлению бистатической системы в целом.
Устройство, реализующее способ определения параметров движения объекта, описанный в [3], принято за прототип.
Основным недостатком прототипа является сложность осуществления его защиты от шумовых активных помех (ШАП). Защита РЛС с непрерывным зондирующим сигналом от ШАП затруднена, так как, например, при использовании автокомпенсатора [5, с.704-708] гармонический сигнал цели будет вычитаться в силу своей когерентности в основном и компенсационном каналах.
Техническим результатом предлагаемого изобретения является достижение эффекта автокомпенсации ШАП в РЛС с непрерывным зондирующим сигналом.
Для достижения указанного технического результата в устройство, принятое за прототип и состоящее из последовательного соединения антенны, приемника, детектора, фильтра низкой частоты и решающего устройства, вводятся один или несколько компенсационных каналов, каждый из которых состоит из последовательно включенных антенны, приемника и режекторного фильтра. Вводится также дополнительный режекторный фильтр и блок автокомпенсации, который включен между выходом приемника основного канала и входом детектора. Выходы режекторных фильтров компенсационных каналов подключены к компенсационным входам автокомпенсатора, в цепь обратной связи которого включается дополнительный режекторный фильтр.
Для более полного понимания сущности заявляемого устройства следует обратиться к нижеследующему описанию и чертежам, иллюстрирующим изобретение.
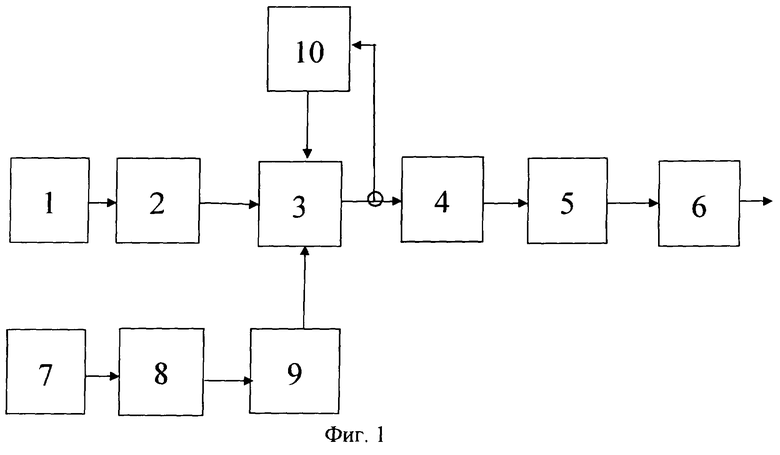
На фиг.1 представлена функциональная схема устройства, реализующего заявляемое изобретение, где обозначено:
1 - антенна основного канала;
2 - приемник основного канала;
3 - блок автокомпенсации;
4 - детектор;
5 - фильтр низкой частоты;
6 - решающее устройство;
7 - антенна компенсационного канала;
8 - приемник компенсационного канала;
9 - режекторный фильтр;
10 - дополнительный режекторный фильтр.
На фиг.2 представлена функциональная схема устройства, принятого за прототип, где использованы те же, что и на фиг.1, обозначения.
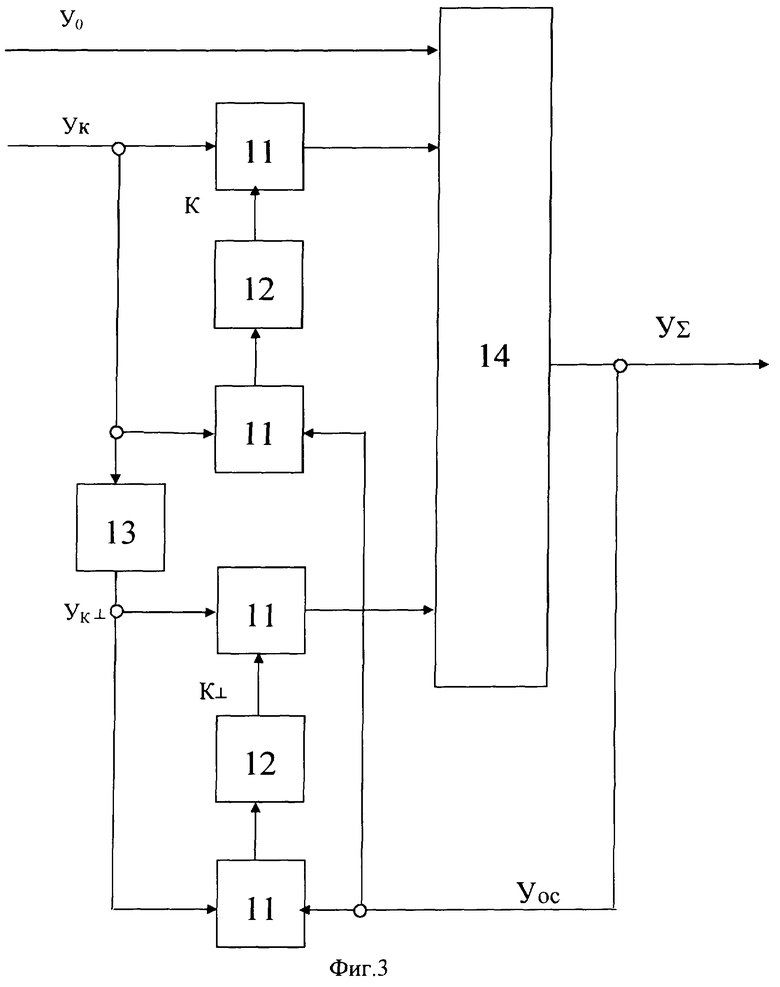
На фиг.3 показан один из вариантов построения блока автокомпенсации [5, с.705], где дополнительно обозначено:
11 - умножитель;
12 - интегратор;
13 - устройство поворота фазы на 90° ;
14 - сумматор;
Уо - вход основного канала автокомпенсатора;
Ук - вход компенсационного канала автокомпенсатора;
У∑ - выход автокомпенсатора;
Уос - обратная связь автокомпенсатора.
Автокомпенсатор (фиг.3) имеет два входа, один выход и включает два квадратурных подканала с вещественными передаточными функциями К и K⊥ . На выходе устройства 13 поворота фазы на 90° формируется сигнал УК⊥.
Подбор коэффициентов при вычислении весовой суммы
У∑ =У0+КУК+К⊥ Ук⊥
обеспечивает компенсацию поступающих на входы взаимно коррелированных помех. При градиентном поиске оптимума [5, с.705] передаточные коэффициенты на выходе интеграторов 12 равны:
K=-γ <У0Ук>/(l+γ <У
К⊥ =-γ <У0Ук⊥>/(1+γ <У
где γ - коэффициент пропорциональности.
На фиг.4 представлен вариант реализации решающего устройства 6, подробно рассмотренный в [3]. На фиг.4 обозначены:
15 - блок измерения направления прихода интерференционного сигнала;
16 - блок измерения доплеровской частоты;
17 - блок определения поверхности положения;
18 - блок вычисления траекторных параметров.
Поясним работу решающего устройства 6, реализованного по схеме фиг.4.
Известно [2, с.30], что доплеровский сдвиг частоты (т.е. частота интерференционного сигнала) для двухпозиционной РЛС на пути передающая позиция - цель - приемная позиция описывается уравнением

где R1(t) - расстояние от передающей позиции до цели,
R10(t) - расстояние от цели до приемной позиции.
Достаточно очевидно, что при приближении цели к базовой линии (линия L, прямая соединяющая передающую и приемную позиции) частота Fд уменьшается и обращается в нуль в момент времени t=t0 нахождения цели на линии L. В этот момент функция R∑ (t) имеет минимальное значение, равное L. Из уравнения (1) следует, что

где R∑ - суммарное расстояние передатчик - цель - приемник;
λ - длина волны излучения;
t0 - момент времени перехода частоты интерференционного сигнала через нуль;
Fд - частота интерференционного сигнала;
L - расстояние между передающей и приемной позициями..
Выше показано, что в момент t0, когда Fд(t0)=О, R∑ (t0)=L. Таким образом
Если с момента обнаружения цели (t=0) осуществляется измерение Fд, то для любого момента, как предшествовавшего t0, так и последующего, может быть определена величина R∑ (t). Эта величина, как известно [1, с.560], определяет поверхность положения в пространстве (эллипсоид) или линию положения (эллипс) на плоскости с фокусами в точке расположения передающей и приемной позиций. Эта операция производится в блоке определения поверхности положения (блок 17).
Синхронно с измерением Fд осуществляется измерение пеленга на цель. Определение пеленга в блоке измерения направления прихода интерференционного сигнала (блок 15) осуществляется по максимуму огибающей сигнала на выходе ФНЧ, формируемой при сканировании луча диаграммы направленности (ДН) антенны РЛС, или моноимпульсным методом при многолучевой ДН антенны РЛС. Пространственные координаты цели определяются в блоке вычисления траекторных параметров (блок 18) при пересечении линии пеленга и поверхности (либо линии) R∑ (t).
Если обнаружение и, соответственно, измерение доплеровской частоты и пеленга осуществляются дискретно во времени, то для определения координат могут быть использованы известные приближенные методы. Так, например, при эквидистантном во времени обнаружении могут быть использованы рекуррентные соотношения:

...

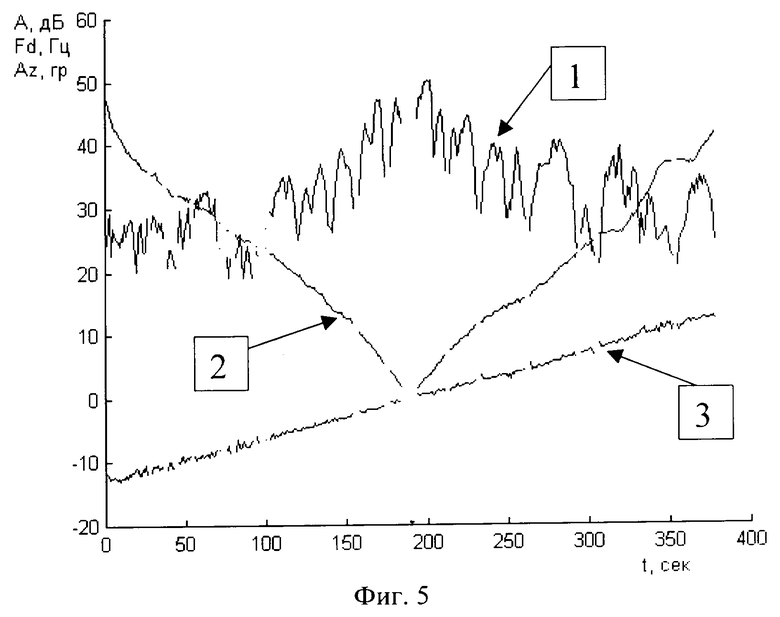
где Δ t - период обнаружения,
На фиг.5 приведены зависимости амплитуды сигнала в блоке измерения доплеровской частоты (кривая 1), измеренной доплеровской частоты (кривая 2) и измеренного азимута цели (кривая 3) в блоке измерения направления прихода интерференционного сигнала по цели типа вертолет Ми-8.
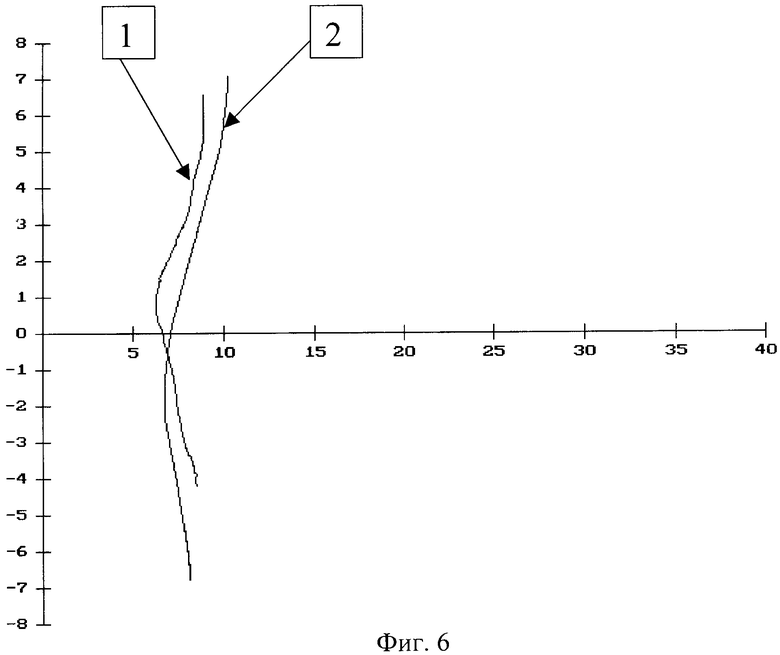
На фиг.6 приведены построенная в блоке вычисления траекторных параметров траектория цели типа вертолет Ми-8 (кривая 1) и его истинная траектория (кривая 2).
Предлагаемое устройство обнаружения движущихся объектов с защитой от шумовых активных помех состоит из последовательно соединенных антенны 1, приемника 2, автокомпенсатора 3, детектора 4, фильтра низких частот 5, решающего устройства 6 и одного или нескольких компенсационных каналов, каждый из которых состоит из антенны 7 компенсационного канала, приемника 8 компенсационного канала и режекторного фильтра 9, выход которого соединен с компенсационным входом автокомпенсатора 3. Дополнительный режекторный фильтр 10 включен в цепь обратной связи автокомпенсатора 3.
Заявляемое устройство работает следующим образом. Передающая система облучает сектор, в направлении на приемную систему, непрерывным квазимонохроматическим сигналом. На вход антенны 1 основного канала поступает суммарный сигнал, образуемый за счет интерференции прямого сигнала передатчика и сигнала, отраженного от цели, и через приемник 2 основного канала поступает на вход автокомпенсатора 3, на компенсационный вход которого с приемника 8 компенсационного канала через режекторный фильтр 9 поступает сигнал, принятый компенсационной антенной 7. Автокомпенсатор 3 обеспечивает компенсацию поступающих на его входы взаимно коррелированных помех. Шумовые активные помехи (ШАП) вычитаются в соответствии с коэффициентом корреляции их в основном 2 и компенсационном 8 приемниках. В цепи обратной связи автокомпенсатора 3 и на его компенсационном входе имеются режекторные фильтры 10 и 9, полоса которых выбирается равной полосе, в которой находится спектр сигналов цели с учетом временных уходов частоты передатчика.
Режекторные фильтры вводятся для настройки автокомпенсатора вне полосы возможного прихода сигналов цели. По сигналу цели автокомпенсатор 3 настраиваться не будет и узкополосный сигнал цели с выхода автокомпенсатора 3 поступает на вход последовательного соединения детектора 4 и ФНЧ 5, где происходит детектирование и выделение низкочастотного колебания.
Далее с выхода ФНЧ 5 низкочастотное колебание поступает на вход решающего устройства, а именно на вход блока 15 измерения направления прихода интерференционного сигнала, где осуществляется измерение пеленга на цель по максимуму огибающей сигнала на выходе ФНЧ 5, и на вход блока 16 измерения доплеровской частоты, в котором доплеровские биения сигнала движущихся целей выделяются методом спектрального анализа. Так как сигнал от движущегося объекта имеет непрерывный гармонический характер, осуществляется его эффективное накопление. При превышении сигналами доплеровской частоты порога обнаружения, уровень которого определяется заданной вероятностью ложных тревог, формируется признак обнаружения цели.
Доплеровские биения сигнала цели поступают на вход блока 17 поверхности положения, где определяется поверхность положения.
Далее на основе данных, получаемых из блока 15 измерения направления прихода интерференционного сигнала и блока 17 определения поверхности положения, в блоке 18 вычисления траекторных параметров происходит определение траекторных параметров цели.
Пространственные координаты цели однозначно находятся как координаты точки пересечения поверхности положения и линии направления на цель из приемной позиции (линии пеленга). Выход решающего устройства 6 является выходом всего устройства.
В зависимости от используемого метода определения направления прихода интерференционного сигнала блок 15 измерения направления прихода интерференционного сигнала может быть выполнен на основе различных блоков. Например, при фазовом моноимпульсном методе определения блок 15 может представлять собой фазометр, при амплитудном моноимпульсном - блок 15 может быть выполнен на основе схем сравнения амплитуд или схем вычитания.
Блок 16 измерения доплеровской частоты может представлять собой низкочастотный измеритель частоты, например анализатор спектра или блок доплеровских фильтров.
Блок 17 определения поверхности положения производит интегрирование входного напряжения с последующим масштабированием.
Блок 18 вычисления траекторных параметров выполняет функциональные преобразования входного колебания, которые могут быть описаны в виде простых зависимостей выходного напряжения от входного сигнала. Основными элементами этого блока могут быть перемножители и сумматоры.
Примененные в заявляемом устройстве блоки могут быть реализованы как на типовых радиотехнических элементах, так и программно на специальной вычислительной машине.
Достижение технического результата в предлагаемом устройстве защиты от шумовых активных помех определяется фактом различия спектров - ШАП и сигнала цели. Спектр ШАП - широкополосный и занимает всю полосу приемника (не менее 0,3-0,5 МГц). Доплеровский спектр сигналов целей в бистатической РЛС узкополосный (не более 1 кГц) вблизи частоты излучения передатчика. С учетом временных уходов частоты передатчика спектр сигналов целей находится в полосе, не превышающей 50 кГц. Такой величины и выбирается полоса режекторного фильтра.
Таким образом, в предлагаемом устройстве автокомпенсатор (АК) настраивается вне полосы возможного прихода сигналов целей, вне полосы 50 кГц. Для этого и вводятся режекторные фильтры на входе компенсационного канала АК и в его цепи обратной связи. АК не будет настраиваться по сигналу целей. В результате ШАП в АК вычитается в соответствии с коэффициентом корреляции ее в основном и компенсационном приемниках [5, с.704-708], а узкополосный сигнал цели проходит через АК и после детектора и ФНЧ поступает на вход решающего устройства, где происходит его эффективное накопление, и при превышении порога решающего устройства формируется сигнал обнаружения.
Проведенное математическое моделирование показало, что предлагаемое устройство обнаружения движущихся объектов обладает эффективной защитой от шумовых активных помех и практически не ослабляет амплитуду сигнала узкополосной цели.
Заявляемое устройство обнаружения с защитой от ШАП предполагается реализовать в РЛС 52Э6М, разрабатываемой в настоящее время Нижегородским НИИ радиотехники.
Литература
1. Теоретические основы радиолокации. /Я.Д.Ширман, В.Н.Голиков, И.Н.Бусыгин и др. Под ред. Я.Д.Ширмана - М.: Сов. Радио, 1970, - с.560.
2. B.C.Черняк, Л.П.Заславский, Л.В.Осипов. Зарубежная радиоэлектроника, 1987, №1, с.29-30.
3. Бляхман А.Б., Самарин А.В. Радиолокационный способ определения движения объекта. Патент №2133480 с приоритетом от 02.02.98 г. (прототип).
4. И.С.Гоноровский. Радиотехнические цепи и сигналы, часть 2 - М.: Сов. Радио, 1967, - с.146.
5. Радиоэлектронные системы: основы построения и теория. Справочник. Под ред. профессора Я.Д.Ширмана. Москва, ЗАО “МАКВИС”, 1998, - с.704-708.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА | 2006 |
|
RU2341813C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2012 |
|
RU2515562C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1999 |
|
RU2168740C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1840239A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |


Изобретение относится к радиолокации и может быть использовано в РЛС с непрерывным зондирующим сигналом, в частности в бистатических радиолокационных комплексах по методу локации “на просвет”. Техническим результатом изобретения является достижение эффекта автокомпенсации ШАП в РЛС с непрерывным зондирующим сигналом. Устройство обнаружения движущихся объектов с защитой от шумовых активных помех содержит последовательно соединенные антенну, приемник, автокомпенсатор, детектор, фильтр низких частот и решающее устройство, кроме того, дополнительный режекторный фильтр и один или несколько компенсационных каналов, каждый из которых состоит из последовательного соединения антенны, приемника и режекторного фильтра, выход которого подключен к компенсационному входу автокомпенсатора, включенного между приемником основного канала и детектором, а дополнительный режекторный фильтр включен в цепь обратной связи автокомпенсатора. 6 ил.
Устройство обнаружения движущихся объектов с защитой от шумовых активных помех, содержащее последовательно соединенные антенну, приемник, детектор, фильтр низких частот и решающее устройство, отличающееся тем, что введены автокомпенсатор, дополнительный режекторный фильтр и один или несколько компенсационных каналов, каждый из которых состоит из последовательного соединения антенны, приемника и режекторного фильтра, выход которого подключен к компенсационному входу автокомпенсатора, включенного между приемником основного канала и детектором, а в цепь обратной связи автокомпенсатора включен дополнительный режекторный фильтр.
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| АДАПТИВНЫЙ КОМПЕНСАТОР ПОМЕХ | 1998 |
|
RU2153769C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| US 4384366, 17.05.1983 | |||
| US 5307069 А, 26.04.1994 | |||
| СПОСОБ ОСАЖДЕНИЯ БЛЕСТЯЩЕГО НИКЕЛЯ ЭЛЕКТРОЛИТИЧЕСКИМ ПУТЕМ | 1940 |
|
SU60373A1 |

