Изобретение относится к радиолокации, в частности к бистатической радиолокации с обнаружением "на просвет", в которой определение местоположения движущейся цели производится по результатам первичных измерений доплеровской частоты и направления прихода отраженного от цели сигнала.
"Просветный" эффект или явление резкого возрастания эффективной поверхности рассеяния цели при рассеянии вперед наблюдается, как известно [1, с. 40-46] , для больших (по отношению к рабочей длине волны излучения λ) непрозрачных объектов, расположенных в окрестности базы системы - отрезка между приемной и передающей антеннами.
Известны различные способы для определения направления прихода отраженного от цели сигнала. Условно их можно классифицировать по тому, какую информацию из принимаемой отраженной от цели электромагнитной волны они используют. Это прежде всего: амплитудные, фазовые и комбинированные способы.
Устройства, реализующие амплитудный способ, рассмотрены в [2]. Так одно из устройств состоит из последовательного соединения антенны, приемника, амплитудного детектора (АД), фильтра низкой частоты (ФНЧ), блока измерения направления прихода интерференционного сигнала. В данном устройстве определение направления прихода сигнала осуществляется при сканировании луча приемной антенны. При этом антенна осуществляет сканирование по угловой координате со скоростью, при которой на выходе ФНЧ успевает сформироваться низкочастотный сигнал биений. Определение направления прихода отраженного от цели сигнала осуществляется по максимуму огибающей на выходе ФНЧ, формируемой при сканировании луча. Помимо механического перемещения антенны, может использоваться и электронное сканирование ее луча, которое может осуществляться, например, в системе с фазированной антенной решеткой (ФАР) [3, с.231]. В этом случае перемещение луча осуществляется путем регулируемого изменения фаз элементов решетки.
Определение направления на цель может осуществляться и без сканирования луча - моноимпульсным способом [3, с.297] при формировании в приемной антенне нескольких парциальных лучей. Устройства, в основе которых лежит этот способ, имеют однотипную конструкцию вне зависимости от количества лучей.
Например, в простейшем случае использования антенны, которая формирует два луча, каждый из выходов антенны (относящийся к соответствующему лучу) соединен со входом последовательного соединения приемника, амплитудного детектора и ФНЧ. Выходы ФНЧ соединены с входом блока измерения направления прихода интерференционного сигнала, в котором определение угловой координаты производится путем сравнения амплитуд биений с одинаковой частотой в парциальных каналах [2, 4]. Формирование нескольких лучей может осуществляться, например, при использовании сдвинутых от фокуса зеркала параболической антенны облучателей [3, с.298] или, например, при использовании ФАР [5, с.201] . В этом случае выходы элементов решетки соединяются с диаграммообразующей схемой, состоящей из фазовращателей, аттенюаторов, направленных ответвителей и других элементов, и формирующей путем соответствующих преобразований над сигналами отдельных элементов решетки требуемое число парциальных лучей.
В рассмотренных устройствах выделение сигнала движущихся целей производится амплитудным детектором, на вход которого поступает суммарное колебание. При этом первая компонента колебания представляет собой прямой сигнал передатчика (он выполняет роль опорного сигнала), а вторая - сигнал, отраженный от цели. Сложение обеих компонент происходит в пространстве, так что на вход антенны поступает уже суммарный сигнал. Системы с таким принципом выделения сигнала движущейся цели относятся к РЛС с внешней когерентностью [6, с.105]. Несомненным достоинством такого подхода является возможность автономной работы приемной позиции, в которой нет необходимости использовать когерентное напряжение передатчика. Это в свою очередь приводит к существенному упрощению и удешевлению бистатической системы в целом.
Однако устройства, реализующие амплитудный способ в бистатических РЛС на "просвет" [2, 4], имеют существенный недостаток, который является следствием углового смещения диаграмм направленности парциальных каналов относительно направления на передатчик. Ввиду чего в них может наблюдаться заметно разный уровень прямого сигнала, приводящий к различию режимов работы АД. Т.е. коэффициент передачи сигнала биений (сигнала доплеровской частоты) каналов может быть различным. При совпадении нуля диаграммы направленности канала с направлением на передатчик прямой сигнал в этом канале отсутствует, и выделение сигнала биений посредством использования для этого АД становится невозможным. Аналогичные проблемы возникают при сканировании диаграммы направленности антенны. Все это приводит в лучшем случае к понижению точности определения пеленга на цель, а в худшем к невозможности его оценки.
Фазовые и комбинированные способы основаны на использовании различия фаз напряжений сигнала в нескольких разнесенных в пространстве элементах приемной антенны. Однозначное направление на цель определяется, например, путем нахождения максимума модуля Фурье преобразования амплитудно-фазового распределения поля по апертуре [5, с.65]. Для практического определения значений данного распределения предварительно производится выделение комплексной огибающей принятого сигнала в каждом приемном канале антенной решетки [7, с. 146; с. 160]. Осуществление этой процедуры предполагает использование когерентного напряжения от передатчика (напряжения когерентного гетеродина).
Устройство, реализующее фазовый способ определения направления на цель, например, в случае использования цифровой обработки сигналов, состоит из антенной решетки, каждый элемент которой соединен со входом фазового детектора, на другой вход которого поступает напряжение когерентного гетеродина. Выход каждого из фазовых детекторов подключен к последовательно соединенным фильтру низкой частоты (ФНЧ) и аналого-цифровому преобразователю (АЦП). Выходы АЦП поступают на входы блока вычисления временного дискретного преобразования Фурье - ДПФ (вычисляемого, например, по алгоритму БПФ), который производит вычисление дискретного амплитудно-частотного спектра корреляционной огибающей приемного сигнала. Временное ДПФ осуществляется для всех приемных каналов в одном и том же временном интервале. Далее производится пространственное ДПФ, осуществляемое одновременно для всех результатов временных ДПФ. Выход блока вычисления двумерного ДПФ соединен со входом блока определения максимума, выход которого в свою очередь соединен со входом конечного блока - счетно-решающего устройства, где по соотношению амплитуд в пространственных каналах определяется направление на цель.
Способ определения направления прихода отраженного от цели сигнала, основанный на приеме ФАР приемного поста бистатической РЛС зондирующего сигнала передающего поста и сигнала вторичного излучения цели, выделении из них путем фазового детектирования интерференционного сигнала биений доплеровской частоты, двумерного дискретного преобразования Фурье и определения угловых координат путем сравнения амплитуды биений с одинаковой частотой в разных пространственных каналах, принят в качестве прототипа [7, с.214-220, 8, с. 38-41].
Основным недостатком рассмотренного способа определения направления на цель является сложность передачи опорного колебания когерентного гетеродина на приемную позицию в случае большой (до 40 км и более) базы системы, т.е. в случае автономной работы приемной позиции. Использование местного гетеродина (генератор колебаний с частотой излучения передатчика) на приемной позиции невозможно, т. к. частоты гетеродинов приемного и передающего постов будут не одинаковы и, кроме того, они будут иметь временные относительные уходы. Выделение опорной частоты из прямого сигнала, принятого на фоне отражений от пассивных помех, приводит к появлению в спектре комбинационных частот. К появлению в спектре комбинационных частот приводит и прием сигналов, отраженных от целей. В результате весь набор комбинационных частот будет "роздан" во все парциальные каналы, что потребует дальнейшей их фильтрации.
Технический результат изобретения - достижение однозначного определения направления на цель в бистатической РЛС с фазированной антенной решеткой с возможностью автономной работы аппаратуры приемной позиции.
Для достижения указанного технического результата в радиолокационном способе измерения направления на цель, принятом за прототип и основанном на формировании парциальных пространственных лучей с использованием опорного напряжения, когерентного напряжению передатчика, подаваемого на фазовые детекторы, исключается необходимость применения опорного напряжения и операций фазового детектирования, а вводятся операции амплитудного детектирования в канале каждого вибратора антенной решетки и операция оценки знака скорости изменения модуля частоты Доплера. Использование операции амплитудного детектирования в заявляемом способе приводит к неоднозначности измерения знака углового направления на цель. Однако последнее устраняется при использовании данных о знаке скорости изменения модуля доплеровской частоты.
Сопоставительный анализ с прототипом показывает, что заявленный способ отличается наличием новых операций и их последовательностью.
Это дает основание считать, что предложенное техническое решение соответствует критерию изобретения "существенные отличия".
Для более полного понимания изложенной сущности заявляемого способа следует обратиться к нижеследующему описанию и чертежам, иллюстрирующим изобретение.
На фиг.1 представлена функциональная схема устройства, реализующего заявляемый способ. На фиг.1 приняты следующие обозначения:
1 - приемная антенная решетка,  - номер вибратора;
- номер вибратора;
2 - приемник;
3 - амплитудный детектор;
4 - ФНЧ;
5 - АЦП;
6 - блок вычисления двумерного дискретного преобразования Фурье;
7 - блок определения максимума;
8 - блок оценки знака скорости изменения модуля частоты Доплера;
9 - счетно-решающее устройство.
На фиг. 2 представлена функциональная схема устройства, реализующего способ определения направления на цель, принятого за прототип, где использованы те же, что и на фиг.1, обозначения. Дополнительно обозначено:
10 - фазовый детектор;
11 - фазовращатель (осуществляет изменение начальной фазы опорного напряжения на четверть периода);
12 - генератор опорного напряжения, частота которого равна рабочей частоте излучения системы (когерентный гетеродин).
На фиг. 3 показан один из вариантов расположения устройств, реализующих заявляемый способ, относительно других элементов бистатической системы. На фиг.3 дополнительно обозначено:
13 - передающая позиция;
14 - луч, вдоль которого распространяется прямой сигнал, излученный антенной передающей позиции;
15 - путь распространения сигнала, отраженного от цели;
d - расстояние между фазовыми центрами антенн передающей и приемной позициями (база системы);
r - расстояние от цели до фазового центра антенны приемной позиции;
r1 - расстояние от фазового центра антенны передающей позиции до
цели,
b - расстояние между вибраторами эквидистантной приемной антенной решетки;
α - направление на цель.
На фиг. 4 показана зависимость доплеровской частоты от времени fд(t), где сплошной линией показана характерная зависимость fд(t) сигнала отраженного от цели, пересекающей базу системы, а пунктирная линия соответствует зависимости модуля частоты Доплера от времени. На фиг.4 обозначено: tП- момент пересечения целью линии базы.
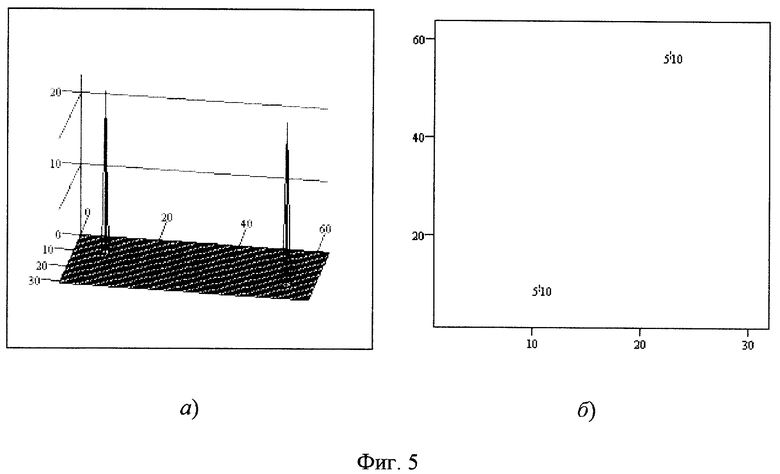
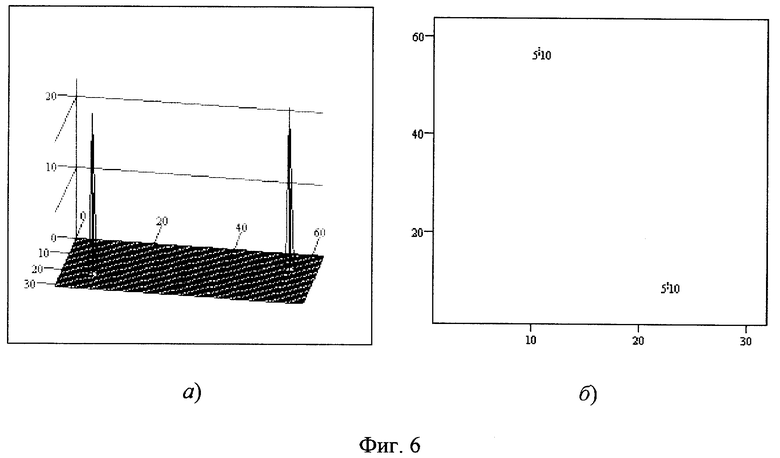
На фиг. 5а, б и фиг.6а,б приведены результаты вычисления модуля прямого дискретного двумерного ДПФ в заявляемом устройстве для количества временных отсчетов I= 64 и вибраторов антенной решетки L=32 в виде двумерного графика (а) и линий уровня (б). Остальные данные были взяты для системы с рабочей длиной волны λ= 0,35 м, b=λ/2, интервал дискретизации Δ=2•10-3 с, угловое положение цели |α|=38,7o, частота Доплера |f∂|=62,5 Гц. Фиг.5 соответствует случаю когда α>0 и fд>0 (или α<0 и fд<0), а фиг.6-α<0 и fд>0 (или α>0 и fд<0).
Рассмотрим принципиальную возможность однозначного измерения угловой координаты цели устройством, реализующим заявляемый способ.
Сигнал на входе каждого из L ненаправленных вибраторов антенной решетки (расстояние между элементами b=λ/2) приемной позиции (фиг.3) можно при наличии цели и без учета помех и шума аналитически записать в следующем виде
где  - индекс, соответствующий номеру вибратора.
- индекс, соответствующий номеру вибратора.
В (1) первое слагаемое правой части равенства представляет собой прямой немодулированный сигнал передатчика с амплитудой U, несущей частотой f0 и начальной фазой ϕ0; второе слагаемое - сигнал, отраженный от цели с амплитудой al(al<<U), частотой Доплера f∂(t) = ω∂(t)/2π и случайной фазой ϕx; ϕl-ϕl+1 = Δϕ - сдвиг по фазе вследствие пространственного разнесения вибраторов. Для определенности можно принять: ϕL=0, ϕL-1 = Δϕ,,....,ϕ1 = Δϕ(L-1). При этом Δϕ - может быть как положительной (цель находится ближе к последнему вибратору - условно назовем множество этих точек нижней полуплоскостью относительно базы системы (фиг.3)), так и отрицательной (цель находится ближе к первому вибратору - условно назовем множество этих точек верхней полуплоскостью (именно эта ситуация изображена на фиг.3)).
При поступлении сигнала (1) на вход последовательного соединения амплитудного детектора и фильтра нижних частот (режектирующего постоянное напряжение), сигнал на его выходе можно представить в виде:
uФНЧ,l(t) = alcos(ω∂(t)t+ϕl-ϕ0+ϕx), (2)
где ϕx-ϕ0 случайная начальная фаза, которая не оказывает влияния при сравнении фаз каналов. В этом случае можно принять ϕx-ϕ0=0.
Как известно [1, с.216; 3,с.326] частота Доплера для бистатической РЛС на пути распространения сигнала "передающая позиция - движущаяся цель - приемная позиция" описывается соотношением:
где r - расстояние от приемной позиции до цели;
rl - расстояние от передающей позиции до цели;
rΣ=r1+r - суммарная дальность до цели;
λ - длина волны излучения передатчика.
Из рассмотрения (3) видно, что при приближении к базе системы d частота fд уменьшается, а при удалении цели - увеличивается. В момент пересечения целью базы системы она равна нулю. Качественно зависимость изменения доплеровской частоты от времени при пролете цели через базу системы показана сплошной линией на фиг.4. Частота напряжения на выходе амплитудного детектора любого из каналов (по существу она соответствует модулю частоты Доплера) в любой момент времени больше либо равна нулю. Т.е. сигналы с одинаковой по модулю и разной по знаку доплеровской частотой неразличимы на выходе АД (2). На фиг.4 пунктирной линией показана частота напряжения на выходе амплитудного детектора для ситуации, когда реальная зависимость доплеровской частоты от времени представлена сплошной кривой на этом же чертеже.
Анализ (3) и фиг.4 показывает, что отрицательной производной по времени (скорости изменения) модуля доплеровской частоты  соответствует положительная частота Доплера fд>0. И наоборот:
соответствует положительная частота Доплера fд>0. И наоборот:  соответствует fд<0. Таким образом, знание знака производной
соответствует fд<0. Таким образом, знание знака производной  в бистатической РЛС с обнаружением "на просвет" однозначно позволяет судить о приближении или удалении цели от базы системы, т.е. о знаке частоты Доплера fд.
в бистатической РЛС с обнаружением "на просвет" однозначно позволяет судить о приближении или удалении цели от базы системы, т.е. о знаке частоты Доплера fд.
При пролете цели в окрестности базы системы и наличии доплеровского сдвига частоты сигнала, отраженного от цели, можно выделить следующие ситуации:
а) цель находится в верхней полуплоскости и приближается к базе системы, в этом случае ей соответствует fд>0 и положительное значение угловой координаты α>0 относительно условно принятого нулевого направления на передатчик (фиг.3), т.е. Δϕ<0 (см. формулу (1));
б) цель находится в верхней полуплоскости и удаляется от базы системы, в этом случае ей соответствует fд<0 и значение угловой координаты α>0, т. е. Δϕ<0;
в) цель находится в нижней полуплоскости и приближается к базе системы, в этом случае ей соответствует fд>0 и значение угловой координаты α<0, т. е. Δϕ>0;
г) цель находится в нижней полуплоскости и удаляется от базы системы, в этом случае ей соответствует fд<0 и значение угловой координаты α<0, т. е. Δϕ>0.
Очевидно, что ситуации а) и г) неразличимы при одинаковых по модулю значениях fд и одинаковых по модулю значениях α, так как на выходе последовательного соединения амплитудного детектора и фильтра нижних частот каналов им соответствует одинаковое напряжение (случайная фазовая добавка ϕx-ϕ0 (2) не учитывается):
Аналогично для ситуаций б) и в):
uФНЧ,l(t) = alcos(ω∂(t)t+(L-l)Δϕ). (5)
Анализ полученных выражений показывает, что знание знака производной  (знака скорости изменения модуля доплеровской частоты), а значит и знака частоты Доплера fд(t) в текущий момент времени в принципе позволяет по соотношению фаз напряжений на выходе последовательного соединения амплитудного детектора и фильтра нижних частот каналов однозначно определять направление прихода отраженного от цели сигнала. Так если на выходе ФНЧ получены напряжения в виде (4), то при fд>0 имеем ситуацию a), а при fд<0 - г). Аналогично и в другом случае (5): при fд>0 имеем ситуацию в), а при fд<0 - б). При отсутствии же информации о знаке частоты Доплера возникает неоднозначность измерения первичных параметров.
(знака скорости изменения модуля доплеровской частоты), а значит и знака частоты Доплера fд(t) в текущий момент времени в принципе позволяет по соотношению фаз напряжений на выходе последовательного соединения амплитудного детектора и фильтра нижних частот каналов однозначно определять направление прихода отраженного от цели сигнала. Так если на выходе ФНЧ получены напряжения в виде (4), то при fд>0 имеем ситуацию a), а при fд<0 - г). Аналогично и в другом случае (5): при fд>0 имеем ситуацию в), а при fд<0 - б). При отсутствии же информации о знаке частоты Доплера возникает неоднозначность измерения первичных параметров.
Посмотрим, каким образом проявляется указанная неоднозначность после вычисления двумерного ДПФ. Напряжения в пространственных каналах на выходе АЦП можно представить в виде
где  - номер вибратора,
- номер вибратора, - номер временного отсчета,
- номер временного отсчета,
ϕox - некоторая случайная фазовая добавка, одинаковая для всех пространственных каналов.
Прямое дискретное двумерное ДПФ:
где  - мнимая единица;
- мнимая единица;
k = 2π/λ - волновое число;

Анализ показывает, что модуль двумерного ДПФ (7) от массива (6) имеет два максимума, которые в случае α>0 и fд>0 (или α<0 и fд<0) расположены на пересечении следующих отсчетов с номерами:
где E{•} - обозначает округления числа, производимого по общим правилам. Этот случай соответствует ситуациям а) и г) (4) рассмотренным ранее, а результат вычисления модуля двумерного ДПФ для I=64, L=32 в виде двумерного графика и линий уровня показан на фиг.5а и фиг.5б соответственно.
При этом значения  - соответствуют положительным углам прихода сигнала α>0, а значения
- соответствуют положительным углам прихода сигнала α>0, а значения  - отрицательным значениям α<0. Аналогично: значения
- отрицательным значениям α<0. Аналогично: значения  - соответствуют положительным частотам fд>0, а значения
- соответствуют положительным частотам fд>0, а значения  - отрицательным частотам fд<0.
- отрицательным частотам fд<0.
В случае если α<0 и fд>0 (или α>0 и fд<0) модуль двумерного ДПФ (7) от массива (6) имеет также два максимума, но расположенных уже на пересечении следующих отсчетов с номерами:
Этот случай соответствует ситуациям б) и в) (5), а результат вычисления модуля двумерного ДПФ приведен фиг.6а и фиг.6б.
Таким образом, ситуации а) и г) (а также б) и в)), как было уже показано, неразличимы. Иначе можно сказать, что при данном виде обработки (берется прямое двумерное ДПФ только от реальной части комплексной огибающей отраженного от цели сигнала) результат вычисления модуля ДПФ всегда содержит два максимума. Первый из них точно соответствует одной из четырех перечисленных выше ситуаций, а другой - ложный максимум (спутник первого) расположен в центрально-симметричном квадранте относительно квадранта, в котором расположен первый максимум. Стоит заметить, что при обработке комплексной огибающей отраженного от цели сигнала (что и производится в устройстве-прототипе) результат вычисления модуля ДПФ всегда содержит один максимум, точно соответствующий реальной ситуации.
Выбор нужного из двух максимумов может быть осуществлен при наличии сведений о приближении или удалении цели от базы системы, т.е. о знаке частоты Доплера fд. Эту информацию, как указывалось ранее, можно определять по знаку производной  , т.е. по уменьшению или увеличению частоты напряжения на выходе последовательного соединения АД и ФНЧ. При дискретном измерении доплеровской частоты функционально блок оценки знака скорости изменения модуля частоты Доплера может осуществлять сравнение последовательных оценок частоты напряжения на выходе ФНЧ. Если например
, т.е. по уменьшению или увеличению частоты напряжения на выходе последовательного соединения АД и ФНЧ. При дискретном измерении доплеровской частоты функционально блок оценки знака скорости изменения модуля частоты Доплера может осуществлять сравнение последовательных оценок частоты напряжения на выходе ФНЧ. Если например  , где i - номер дискретного измерения (
, где i - номер дискретного измерения ( - обозначает оценку модуля доплеровской частоты), то частота Доплера больше нуля (фиг. 4).
- обозначает оценку модуля доплеровской частоты), то частота Доплера больше нуля (фиг. 4).
В предлагаемом способе однозначное измерение (т. е. выбор одного из двух максимумов) может быть реализовано путем анализа изменения (перемещения) максимумов модуля ДПФ вдоль оси дискретных частот: при сближении максимумов (приближении их к нулевой частоте) модуль доплеровской частоты убывает и значит частота Доплера больше нуля, и наоборот, при удалении максимумов от нулевой частоты модуль доплеровской частоты возрастает, т.е. fд меньше нуля. Так можно предложить, например, такой вариант определения знака частоты Доплера. Если модуль разности  между номерами отсчетов m (дискретными частотами), соответствующих расположению максимумов модуля двумерного ДПФ на текущем i-м измерении, больше аналогичной разницы на (i-1)-м измерении:
между номерами отсчетов m (дискретными частотами), соответствующих расположению максимумов модуля двумерного ДПФ на текущем i-м измерении, больше аналогичной разницы на (i-1)-м измерении:
то fд<0 и нужный максимум расположен в области, где дискретная частота m лежит в отрезке [1+I/2; I]. И наоборот, при
доплеровская частота fд>0 и максимум расположен в области m∈[1,//2].
После выбора нужного максимума оценка угловой координаты цели может быть определена по номеру отсчета n с максимальным модулем:
Таким образом, применение амплитудного детектирования в каждом из приемных каналов, вместо фазового детектирования, исключает необходимость в когерентном опорном напряжении, а временная обработка, заключающаяся в определении знака скорости изменения модуля доплеровской частоты, устраняет неоднозначность измерения знака углового направления на цель.
Проведенное математическое моделирование показало, что предлагаемый способ измерения обладает возможностью однозначного определения направления прихода отраженного от цели сигнала, и подтвердило эффективность его работы.
Заявляемый способ определения направления прихода отраженного от цели сигнала реализован в РЛС 52Э6М, разрабатываемой в настоящее время Нижегородским НИИРТ.
Источники информации
1. Черняк В.С. Многопозиционная радиолокация. - М.: Радио и связь, 1993. - 416 с.
2. Бляхман А.Б., Самарин А.В. Радиолокационный способ определения параметров движения объекта: Заявка на изобретение 98101955/ 09(002027) с приоритетом от 02.02.98. Патент 2133480.
3. Теоретические основы радиолокации. Ширман Я.Д., Голиков В.Н., Бусыгин И.Н. и др.; Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970. - 560 с.
4. Бляхман А. Б., Рындык А.Г., Ковалев Ф.Н. Устройство для определения параметров движения объекта: Заявка на изобретение 97117868/ 09(019049) с приоритетом от 29.10.97. Патент 2124220.
5. Справочник по радиолокации: В 4 т. / Под ред. М. Сколника; пер. с англ. под общ. ред. К. Н. Трофимова. - М.: Сов. радио, 1977. - Т. 2. - 405 с.
6. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983. - 536 с.
7. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981. - 416 с.
8. Амиантов И. Н. Избранные вопросы статистической теории связи. - М.: Сов. Радио, 1971. - 416 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1999 |
|
RU2168740C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДОПЛЕРОВСКОЙ ОБРАБОТКИ КВАДРАТУРНЫХ ИМПУЛЬСНЫХ ВИДЕОСИГНАЛОВ | 1997 |
|
RU2155970C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2019 |
|
RU2714672C1 |

Изобретение относится к радиолокации, в частности к бистатической радиолокации. Технический результат - достижение однозначного определения направления на цель в бистатических радиолокационных станциях с возможностью автономной работы аппаратуры приемной позиции. Для достижения указанного результата в радиолокационном способе измерения направления на цель, принятом за прототип и основанном на приеме фазированной антенной решеткой приемного поста бистатической радиолокационной станции зондирующего сигнала передающего поста и сигнала вторичного излучения цели, выделении из них путем детектирования интерференционного сигнала биений доплеровской частоты, двумерного дискретного преобразования Фурье и определении направления на цель путем сравнения амплитуд сигналов биений с одинаковой частотой в разных пространственных каналах, вводятся операции: для выделения сигнала биений доплеровской частоты в каналах фазированной антенной решетки приемного поста - амплитудное детектирование, а для устранения возникающей при амплитудном детектировании неоднозначности знака углового направления на цель - межобзорная обработка сигналов после двумерного дискретного преобразования Фурье, заключающаяся в определении знака скорости изменения модуля доплеровской частоты. 6 ил.
Радиолокационный способ определения направления прихода отраженного от цели сигнала, основанный на приеме фазированной антенной решеткой приемного поста бистатической радиолокационной станции зондирующего сигнала передающего поста и сигнала вторичного излучения цели, выделении из них путем детектирования интерференционного сигнала биений доплеровской частоты, двумерного дискретного преобразования Фурье и определении направления на цель путем сравнения амплитуд сигналов биений с одинаковой частотой в разных пространственных каналах, отличающийся тем, что для выделения сигнала биений доплеровской частоты в каналах фазированной антенной решетки приемного поста используется амплитудное детектирование, а для устранения возникающей при амплитудном детектировании неоднозначности знака углового направления на цель применяется межобзорная обработка сигналов после двумерного дискретного преобразования Фурье, заключающаяся в определении знака скорости изменения модуля доплеровской частоты.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: Радио и связь, 1981, с.214-220, 8, 38-41 | |||
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР-ЧАСТОТОМЕР | 1993 |
|
RU2124216C1 |
| US 4804963, 14.02.1989 | |||
| US 3943514, 09.03.1976 | |||
| DE 4130699 А1, 25.03.1993. | |||

