Изобретение относится к электротехнике, в частности к управляемым электроприводам на базе синхронных двигателей, и может иметь промышленное применение, например, в робототехнике, в устройствах жизнеобеспечения в космосе (центрифугах, сепараторах, компрессорах).
Известно устройство для частотно-токового управления синхронным двигателем (СД), содержащее усилители фазных токов, координатный преобразователь, формирователь управляющего напряжения и электромеханический датчик угла типа СКВТ, установленный на валу двигателя [Авторское свидетельство СССР N 186019, МКИ H 02 P 5/34, 1963 г.].
Недостатком указанного известного устройства является сложность конструкции и настройки, связанные с размещением датчика угла (СКВТ) на валу и необходимостью специальной фазировки магнитных систем датчика и СД.
Известно устройство для формирования опорных сигналов управления СД, содержащее управляемый генератор фазы, датчик фазных ЭДС и датчик двойного угла поворота продольной оси ротора СД. Напряжения с указанных датчиков поступают для управления генератором фазы, выходные напряжения которого используют в качестве опорных гармонических функций при формировании фазных токов СД [Авторское свидетельство СССР N 1319225, МКИ H 02 P 7/42, 1985 г.].
Электропривод, построенный с использованием указанного известного устройства, конструктивно прост, т.к. не содержит электромеханического датчика угла типа СКВТ, однако имеет ограниченную полосу пропускания и большие ошибки регулирования в переходных режимах из-за наличия электронной следящей системы в контуре управления СД.
Наиболее близким по технической сущности к предложению является устройство для частотно-токового управления синхронным двигателем, содержащее блок управления с формирователем управляющего напряжения, регулируемым источником питания, подключенным к фазным обмоткам синхронного двигателя, и входами для опорных гармонических функций, формирователь опорных гармонических функций одинарного угла поворота продольной оси ротора и датчик гармонических функций двойного угла поворота продольной оси ротора, выходы которого подключены к соответствующим входам упомянутого формирователя опорных гармонических функций [Авторское свидетельство СССР N 1014117, МКИ H 02 P 5/34, 7/42, 1981 г.]
Недостатком указанного известного устройства, выбранного за прототип, является ограниченная область применения, связанная с неоднозначностью характеристики управления, при которой одной и той же полярности управляющего напряжения может соответствовать различный знак момента на валу СД.
Это связано с тем, что получение требуемых опорных гармонических функций, соответствующих одинарному углу поворота продольной оси ротора непосредственно из выходных сигналов датчика двойного угла поворота, осуществляется с точностью до π.
Целью изобретения является расширение области применения устройства за счет получения в нем жесткого соответствия между заданным и фактическим направлениями вращения.
Указанная цель достигается тем, что в устройство для управления синхронным двигателем, содержащее блок управления с формирователем управляющего напряжения регулируемым источником питания, подключенным к фазным обмоткам синхронного двигателя, и входами для опорных гармонических функций, формирователь опорных гармонических функций одинарного угла поворота продольной оси ротора и датчик гармонических функций двойного угла поворота продольной оси ротора, выходы которого подключены к соответствующим входам упомянутого формирователя опорных гармонических функций, введены блок датчиков фазных ЭДС, блок апериодических звеньев, и блок нормирования, а формирователь опорных гармонических функций одинарного угла поворота продольной оси ротора снабжен дополнительными управляющими входами, при этом выходы упомянутого формирователя и выходы блока датчиков фазных ЭДС подключены к соответствующим входам блока апериодических звеньев, подключенного выходами к входам блока нормирования, выходы которого соединены с соответствующими входами для опорных функций блока управления и с дополнительными управляющими входами формирователя опорных гармонических функций одинарного угла поворота продольной оси ротора.
На фиг. 1 представлена функциональная схема предложенного устройства; на фиг. 2 - пример выполнения формирователя опорных гармонических функций одинарного угла поворота продольной оси ротора; на фиг. 3 - пример выполнения блока апериодических звеньев; на фиг. 4 - пример выполнения блока нормирования.
Устройство для управления синхронным двигателем 1 (фиг.1) содержит блок управления 2 с формирователем 3 управляющего напряжения Uy, регулируемым источником питания 4, подключенным к фазным обмоткам синхронного двигателя 1, и входами 6 для опорных гармонических функций sinθ, cosθ, формирователь 7 опорных гармонических функций одинарного угла поворота продольной оси d ротора и датчик 8 гармонических функций двойного угла 2 2θ поворота продольной оси d ротора, выходы которого подключены к соответствующим входам упомянутого формирователя 7 опорных гармонических функций.
В устройство введены блок 9 датчиков фазных ЭДС, блок 10 апериодических звеньев и блок 11 нормирования, а формирователь 7 опорных гармонических функций одинарного угла поворота продольной оси ротора снабжен дополнительными управляющими входами 12, при этом выходы упомянутого формирователя 7 и выходы блока 9 датчиков фазных ЭДС подключены к соответствующим входам блока 10 апериодических звеньев, подключенного выходами к входам блока 11 нормирования, выходы которого соединены с соответствующими входами 6 для опорных функций блока управления 2 и с дополнительными управляющими входами 12 формирователя 7 опорных гармонических функций одинарного угла поворота продольной оси ротора.
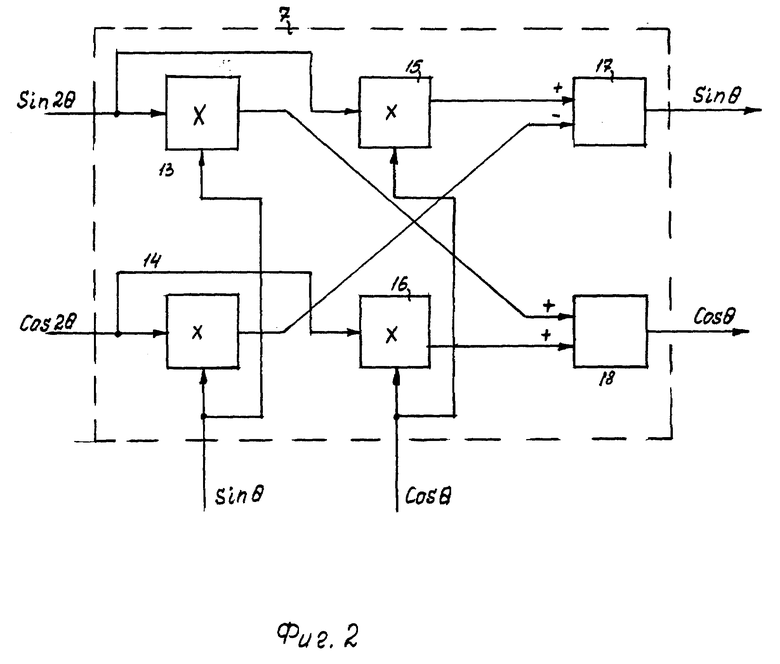
Формирователь 7 опорных гармонических функций содержит элементы умножения 13-16 (фиг. 2) и сумматоры 17, 18.
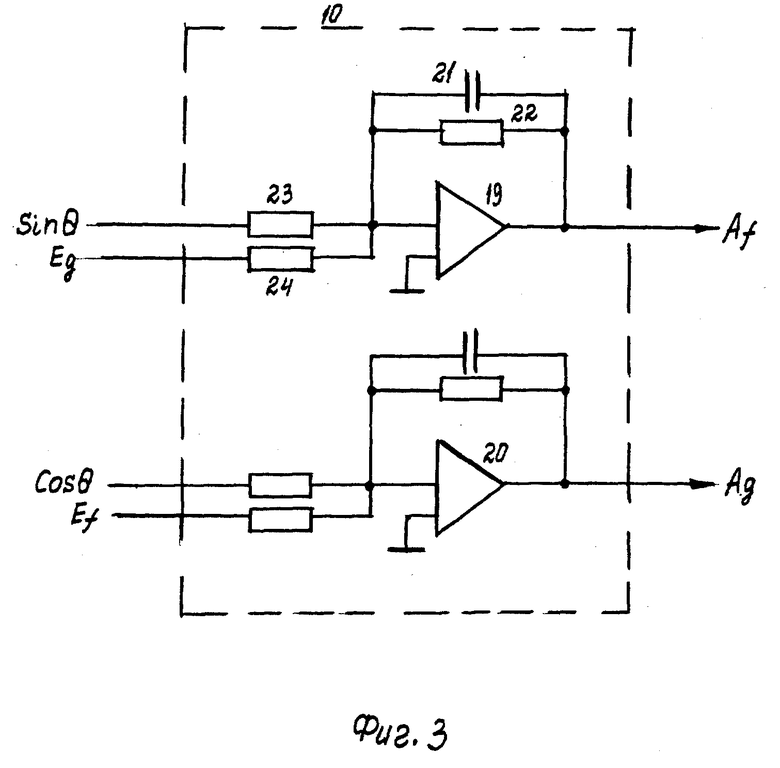
Блок 10 апериодических звеньев построен на операционных усилителях 19, 20 (фиг. 3), каждый из которых охвачен цепью обратной связи из параллельно включенных конденсатора 21 и резистора 22. К входу усилителей подключены масштабные резисторы 23, 24.
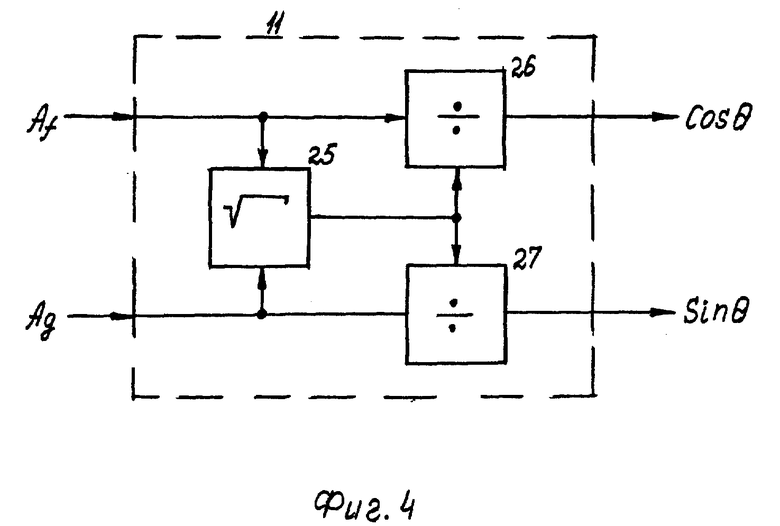
Блок 11 нормирования содержит определитель модуля 25 (фиг. 4) и элементы деления 26, 27.
Электропривод функционирует следующим образом.
В соответствии с частотно-токовым управлением фазные обмотки Wg, Wf синхронного двигателя 1 питают токами:
где ki - коэффициент преобразования.
Постоянное переключение силовых ключей в управляемом источнике токов 4 определяет кроме того наличие в фазных обмотках СД высокочастотных пульсирующих составляющих токов с небольшой амплитудой. Указанные составляющие токов используются в датчике 8 гармонических функций двойного угла 2θ\для формирования функций sin2θ, cosθ.
На выходах датчика 9 фазных ЭДС получают
где Фв - поток возбуждения СД 1, при этом фазные потоки в СД определяются
На выходах блока 10 апериодических звеньев при соответствующем выборе коэффициентов передачи для входных функций sinθ, cosθ и фазных ЭДС Ef, Eg получают
где kA - коэффициент передачи блока 10 апериодических звеньев.
Блок 11 нормирования реализует соотношения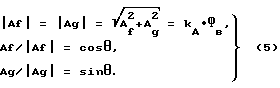
Полученные на выходах блока 11 функции sinθ, cosθ поступают на соответствующие опорные входы координатного преобразователя 5 и на дополнительные входы 12 формирователя 7.
Формирователь 7 опорных гармонических функции одинарного угла θ с помощью элементов умножения 13-16 и сумматоров 18, 19 реализует следующие соотношения:
sin2θ•cosθ-cos2θ•sinθ = sinθ, (6)
cos2θ•cosθ+sin2θ•sinθ = cosθ.
Из (5), (6) следует, что функции на выходах формирователя 7 совпадают с функциями на его дополнительных входах, поступающих с блока 11 нормирования.
Это означает, что если по каким-либо причинам на выходах блока 11 нормирования будут сформированы функции -sinθ, -cosθ, то они будут и на выходах формирователя 7. В этом случае будет нарушено соответствие между заданным направлением вращения СД 1, которое определяется знаком управляющего напряжения Uy, и фактическим направлением вращения, определяемым знаком гармонических функций на входах 6 блока управления 2 ( полученных с помощью датчика 8 и формирователя 7).
Устранение указанного недостатка достигается введением датчика 9, на выходах которого получают фазные ЭДС в соответствии с (2).
Фазные ЭДС Ef, Eg подают на соответствующие входы блока 10 апериодических звеньев. Цепь интегрирования в операционных усилителях 19,20 (фиг .3) выбирается более мощной (в 10-100 раз) в сравнении с цепью статического усиления. После подключения к устройству источника внешнего питания (на фиг. 1 не показанного) на выходах формирователя 7 и блока 11 могут появиться произвольные (с точностью до π) значения sinθ, cosθ. При поступлении управляющего напряжения Uy с выходов источника 4 в фазные обмотки СД поступают токи. Ротор СД начнет вращение и на выходах датчика 9 появятся фазные ЭДС Ef, Eg которые определяют на выходах блока 10 апериодических звеньев и блока 11 нормирования (следовательно, и на выходах формирователя 7) требуемые функции sinθ, cosθ.
С этого момента поддержание требуемых функций sinθ, cosθ, включая режим стоянки (когда Ef = Eg = 0) осуществляется формирователем 7.
Таким образом в электроприводе устраняется начальная неоднозначность управления, определяемая электронным датчиком 7 двойного угла 2θ продольной оси ротора, и расширяется область его возможного применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2134480C1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Способ управления синхронным двигателем | 1975 |
|
SU604112A1 |
| Формирователь опорных сигналов для управления синхронным электродвигателем | 1982 |
|
SU1061229A1 |
| Формирователь опорных гармонических напряжения для управления синхронным двигателем | 1988 |
|
SU1661959A1 |
| Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором (его варианты) | 1980 |
|
SU1100699A1 |
Изобретение относится к электроприводам на базе синхронных двигателей и может иметь промышленное применение, например, в робототехнике, в устройствах жизнеобеспечения в космосе (центрифугах, сепараторах, компрессорах). Существо изобретения заключается в том, что в устройство для частотно-токарного управления синхронным двигателем, содержащее блок управления, формирователь опорных гармонических функций одинарного угла поворота продольной оси ротора и датчик гармонических функций двойного угла поворота, введены блок датчиков фазных ЭДС, блок апериодических звеньев, и блок нормирования, при этом выходы упомянутого формирователя и выходы блока датчиков фазных ЭДС подключены к соответствующим входам блока апериодических звеньев, подключенного выходами к входам блока нормирования, выходы которого соединены с соответствующими входами для опорных функций блока управления и с дополнительными управляющими входами формирователя опорных гармонических функций одинарного угла поворота. Технический результат: в электроприводе устраняется начальная неоднозначность управления (несоответствие заданного и фактического направления вращения) и расширяется область его возможного применения. 4 ил.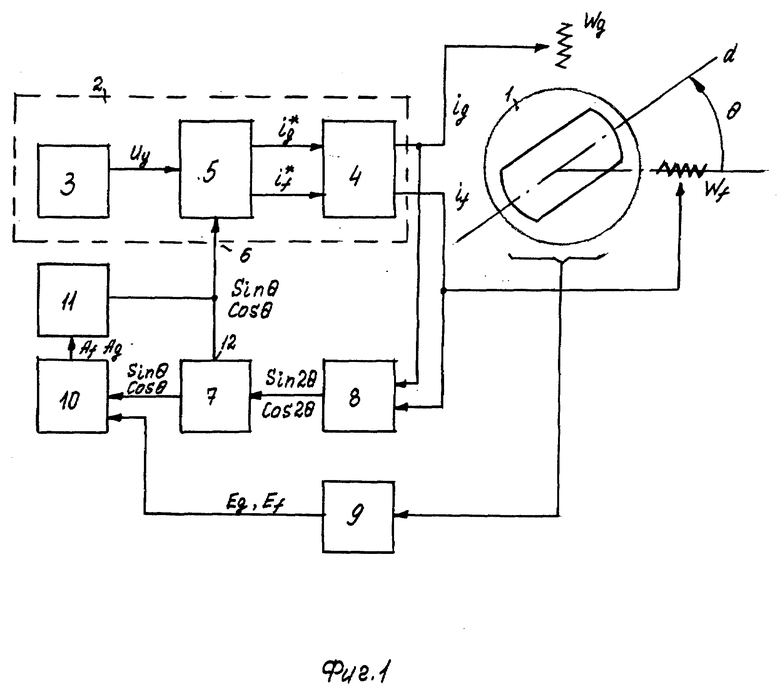
Устройство для управления синхронным двигателем, содержащее блок управления с формирователем управляющего напряжения, регулируемым источником питания, подключенным к фазным обмоткам синхронного двигателя, и входами для опорных гармонических функций, формирователь опорных гармонических функций одинарного угла поворота продольной оси ротора и датчик гармонических функций двойного угла поворота продольной оси ротора, выходы которого подключены к соответствующим входам упомянутого формирователя опорных гармонических функций, отличающееся тем, что введены блок датчиков фазных ЭДС, блок апериодических звеньев и блок нормирования, а формирователь опорных гармонических функций одинарного угла поворота продольной оси ротора снабжен дополнительными управляющими входами, при этом выходы упомянутого формирователя и выходы блока датчиков фазных ЭДС подключены к соответствующим входам блока апериодических звеньев, подключенного выходами к входам блока нормирования, выходы которого соединены с соответствующими входами для опорных функций блока управления и с дополнительными управляющими входами формирователя опорных гармонических функций одинарного угла поворота продольной оси ротора.
| Электропривод переменного тока | 1981 |
|
SU1014117A1 |
| SU 1198433 A, 15.12.85 | |||
| Формирователь опорных гармонических напряжения для управления синхронным двигателем | 1988 |
|
SU1661959A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1985 |
|
SU1319225A1 |
| Устройство для изучения дифракции медленных электронов | 1934 |
|
SU43973A1 |
