2. Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором, содержащее датчик фазных токов ротора, датчики фазных токов и напряжений статора, связанные с датчиком составляющих ориентирующего параметра статора, выходы которого подключены к одним входам координатного преобразователя, отличающееся тем, что, с целью упрощения,, снабжено блоком нормирования, дополнительным координатным преобразователем и определителем токов ротора ,в осях статора, входы которого подключены к датчикам фазньк токов и напряжений статора, а выходы соединены с одними входами дополнительного координатного преобразователя, другие входы которого соединены с выходами датчика фазных токов ротора, а выходы дополнительного координатного преобразователя связаны с другими входами координатного преобразователя, выход которого подключен к блоку нормирования.
3. Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором, содержащее датчик фазньк токов и напряжений статора, связанные с датчиком составляюощх ориентирующего параметра статора, выходы которого подключены к одним входам координатного преобразователя, о тличающееся тем, что, с целью упрощения, снабжено блоком нормирования, дополнительным координатным преобразователем и определителем токов ротора в осях статора, входы которого подключены к датчикам фазных токов и напряжений статора, а выходы соединены с одними входами дополнительного координатного преобразователя, другие входы которого связаны с выходами координатного преобразователя, другие входы которого подключены к датчику фазных токов ротора, при этом выход дополнительного координатного преобразователя связан с входом блока нормирования.
4.Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором, содержащее датчик фазных токов ротора, датчики фазных токов и напряжений статора, связанные
с датчиком составляющих ориентирующего параметра статора, выходы которого подключены к одним входам координатного преобразователя, другие входы которого подключены к выходам датчика фазных токов статора, отличающееся тем, что, с целью упрощения, снабжено блоком нормирования, дополнительным координатным преобразователем, определителем токов статора в осях ротора и датчиком фазных напряжений ротора, зыход которого и выход датчика фазных токов ротора соединены с входами определителя токов статора в осях ротора, выход которого подключен к одним входам дополнительного координатного преобразователя, к другим входам которого подсоединены выходы координатного .преобразователя, при этом выход дополнительного координатного преобразователя соединен с входом блок нормирования.
5.Устрор1ство попп. 1 - А, отличающееся тем, что снабжено датчиком составляющих скорости изменения опорного параметра ротора
и блоком апериодических звеньев, входы которого связаны с выходами датчика составляющих скорости изменения опорного параметра ротора и блока номирования.
6. Устройство по п. 5, отличающееся тем, что снабжено третьим координатньш преобразователе одни входы которого связаны с выходами датчика составляющих скорости изменения опорного параметра ротора, а другие - с входами блока апериодических звеньев.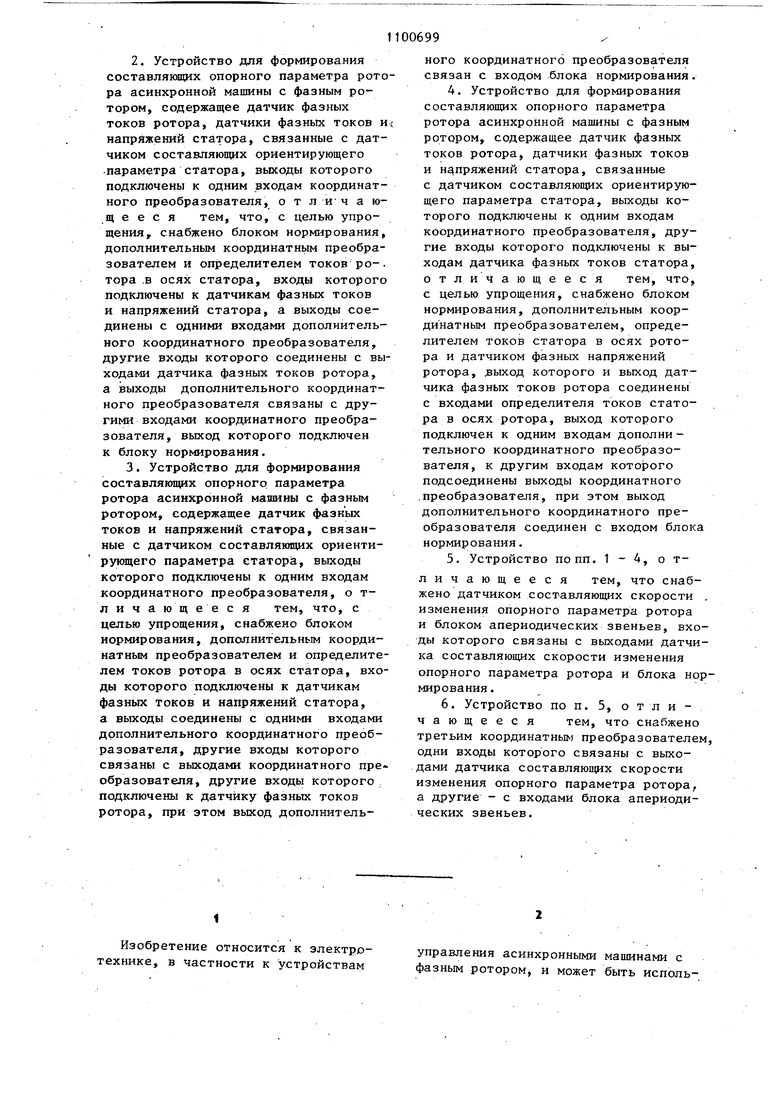
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронной машиной с фазным ротором | 1983 |
|
SU1137561A1 |
| Устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором | 1982 |
|
SU1067583A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Устройство для управления асинхронной машиной с фазным ротором | 1982 |
|
SU1032581A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
1. Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором, содержащее датчик фазных токов ротора, датчики фазных токов и напряжений статора, связанные с датчиком составляющих ориентирукнцего параметра статора, выходы которого подключены к одним входам координатного преобразователя, к другим входам которого подключены выходы датчика фазных токов статора, о тличающееся тем, что, с целью упрощения, снабжено определителем составляющих тока ротора в синхронных осях, дополнительным координатным преобразователем и блоком нормирования, вход которого подключен к выходу дополнительного координатного преобразователя, входы (Л которого связаны с выходами датчика фазных токов ротора и определителя составлякнцих тока ротора в синхронных осях, входы которого соединень) с выходами координатного преобразователя . О СО СО 1г cosaf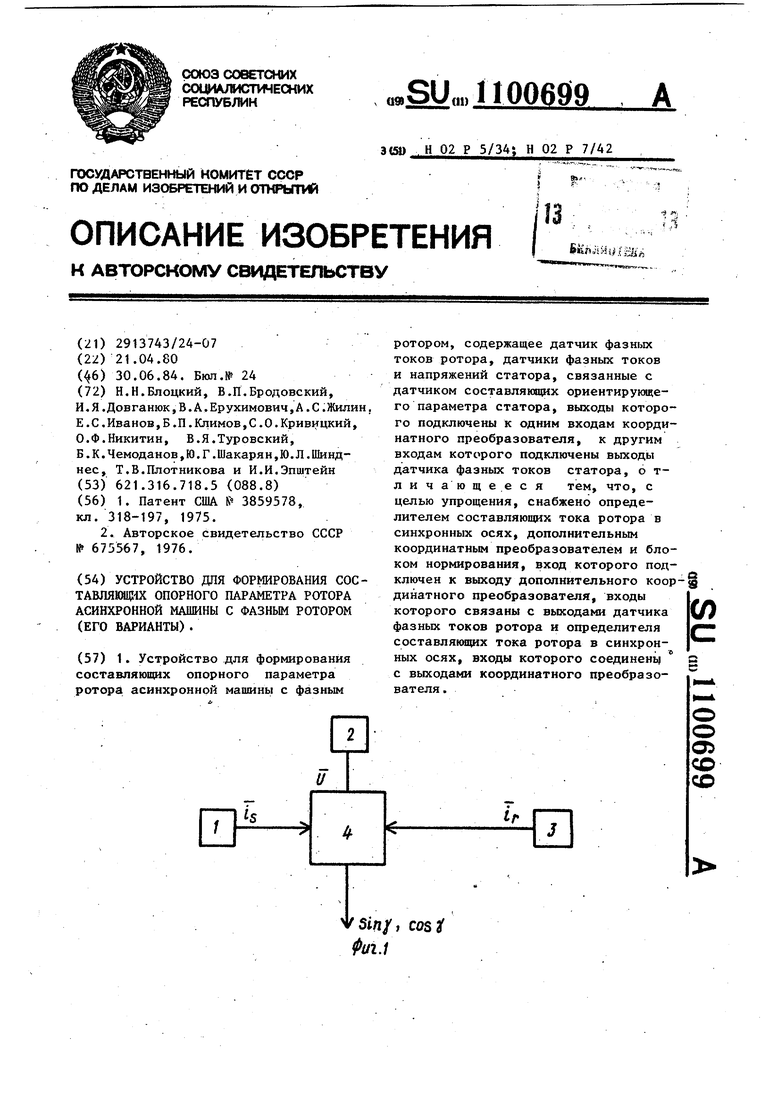
1
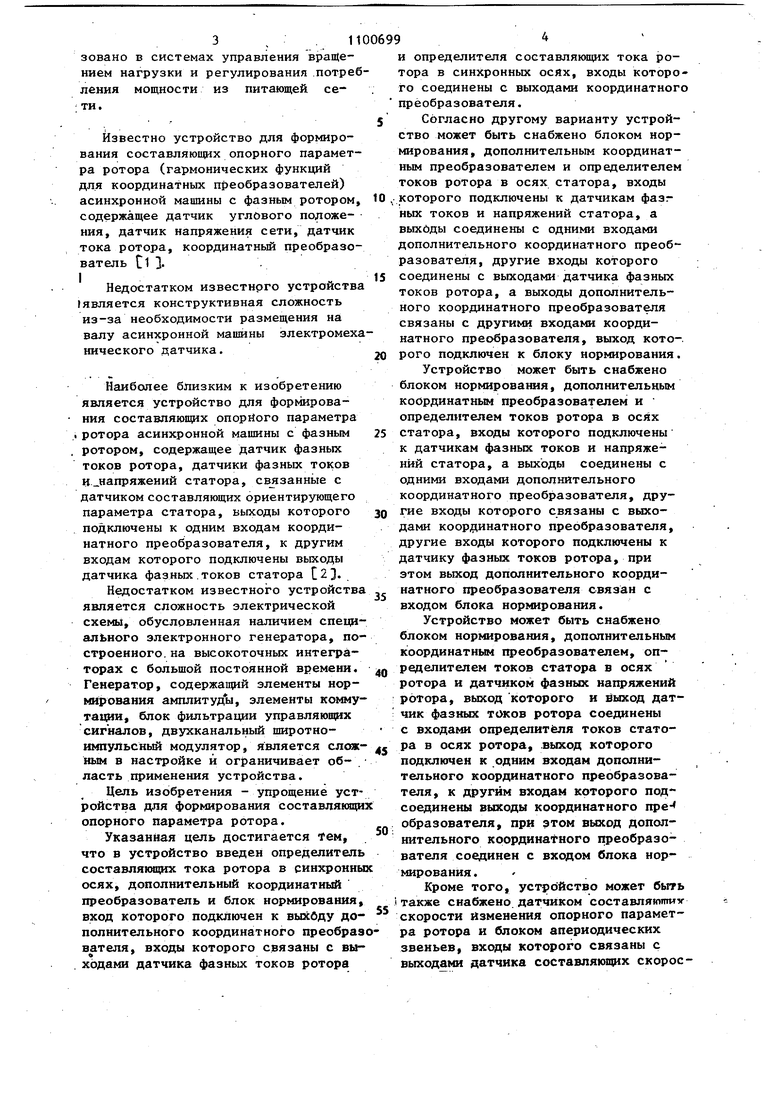
Изобретение относится к электротехнике, в частности к устройствам
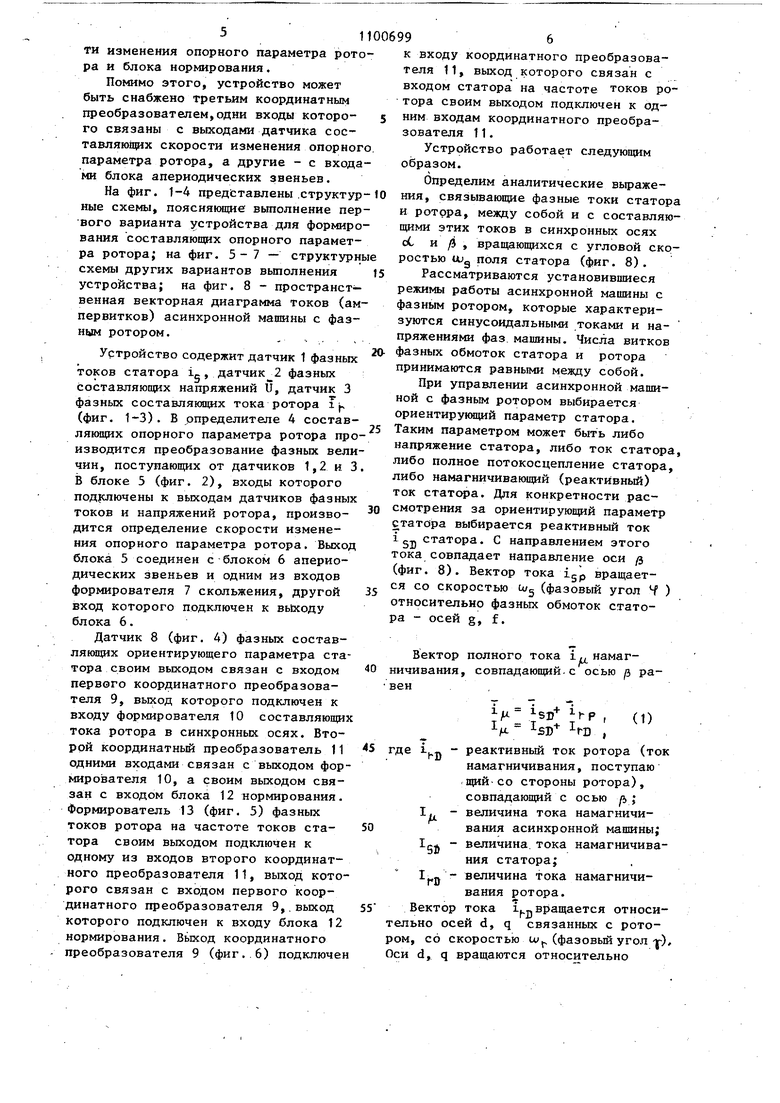
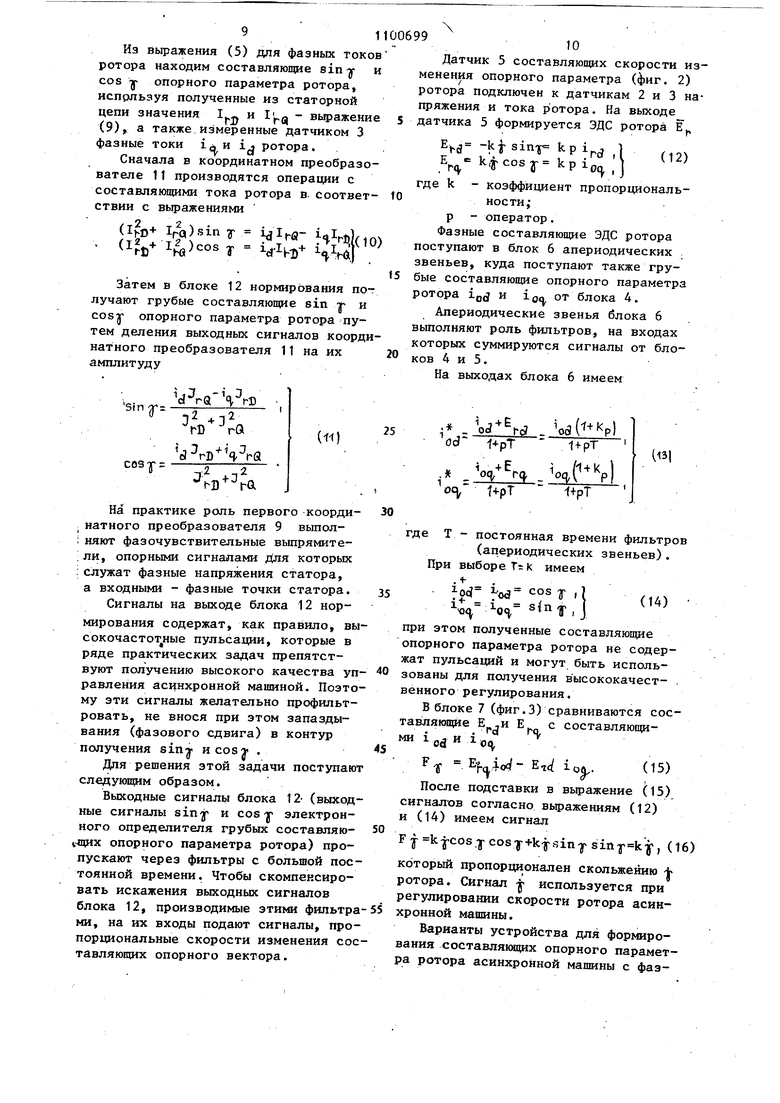
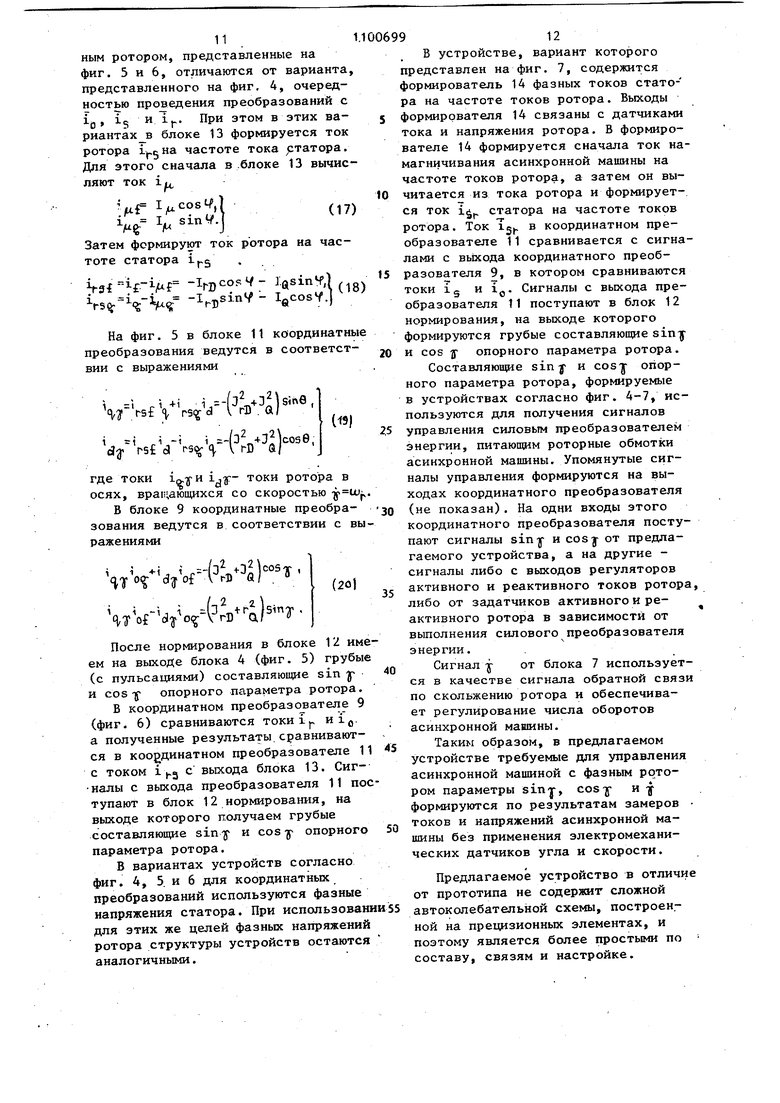
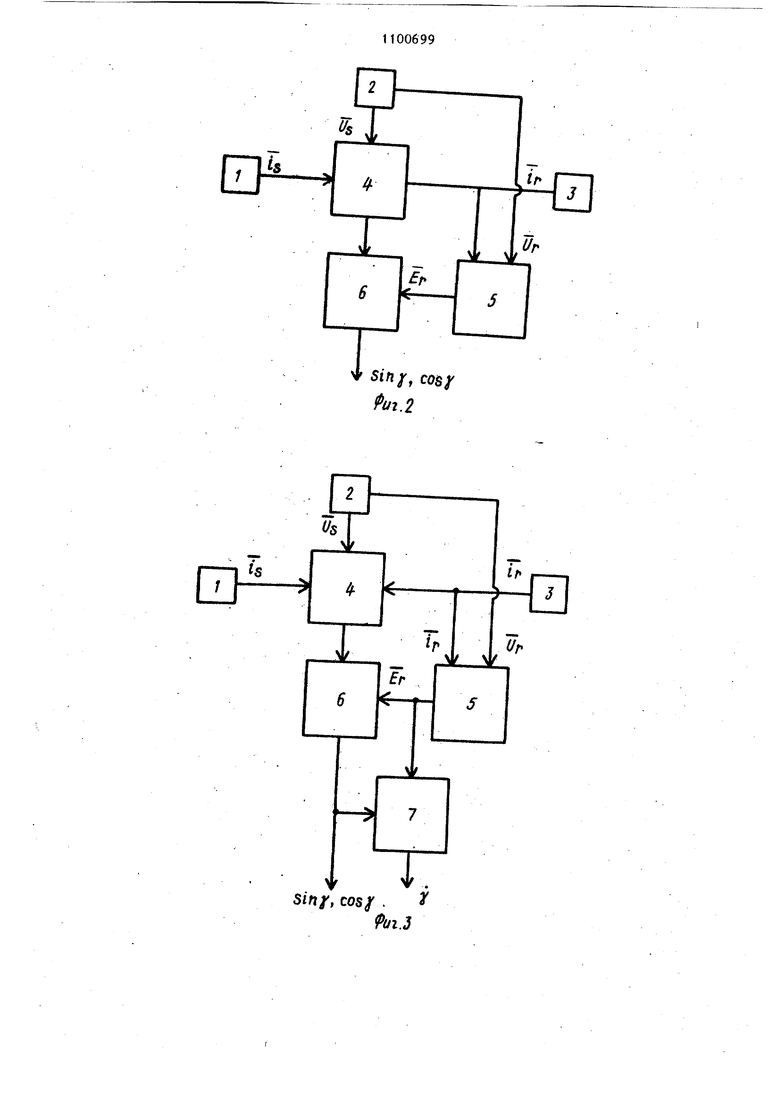
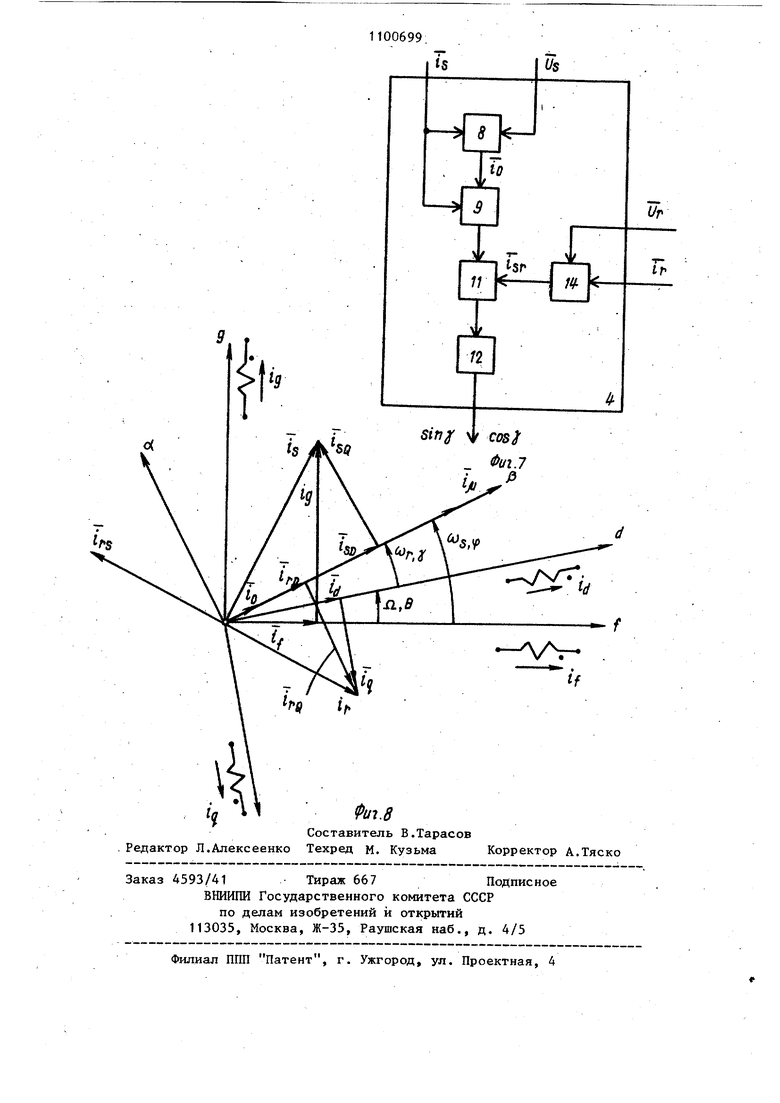
управления асинхронными машинами с фазным ротором, и может быть использовано в системах управления вращением нагрузки и регулирования потреб ления мощности из питающей се. . - Известно устройство для формирования составляющих опорного параметра ротора (гармонических функций для координатных преобразователей) асинхронной машины с фазным ротором, содержащее датчик углового положения, датчик напряжения сети, датчик тока ротора, координатный преобразователь tl 3. I„ Недостатком известного устройств (является конструктивная сложность из-за необходимости размещения на валу асинхронной машины электромех нического датчика. Наиболее близким к изобретению является устройство для формирова ния составляющих опорйого параметра ротора асинхронной машины с фазным , ротором, содержащее датчик фазных токов ротора, датчики фазных токов И напряжений статора, св 1занные с датчиком составляющих ориентирующего параметра статора, выходы которого подключены к одним входам координатного преобразователя, к другим входам которого подключены выходы датчика фазных.токов статора С2. Недостатком известного устройств является сложность электрической схемы, обусловленная наличием специ ального электронного генератора, по строенного, на высокоточных интеграторах с большой постоянной времени. Генератор, содержащий элементы нормирования амш1итуд ы, элементы комму tauftHf блок фильтрации управляю1цих сигналов, двухканальный широтноимпульсный модулятор, является слсяс ным в настройке и ограничивает область применения устройства. Цель изобретения - упрощение уст ройства для формирования составлякици опорного параметра ротора. Указанная цель достигается -тем, что в устройство введен определитель составляюп пс тока ротора в синхронны осях, дополнительный координатный преобразователь и блок нормирования вход которого подключен к выходу дополнительного координатного преобра вателя, входы которого связаны с вы. ходами датчика фазных токов ротора и определителя составляющих тока ротора в синхронных осях, входы которого соединены с выходами координатного преобразователя. Согласно другому варианту устройство может быть снабжено блоком нормирования, дополнительным координатным преобразователем и определителем токов ротора в осях статора, входы которого подключены к датчикам фазг ных токов и напряжений статора, а выхйды соединены с одними входами дополнительного координатного преобразователя, другие входы которого соединены с выходами датчика фазных токов ротора, а выходы дополнительного координатного преобразователя связаны с другими входами координатного преобразователя, выход кото-, рого подключен к блоку нормирования. Устройство может быть снабжено блоком нормирования, дополнительным координатным преобразователем и определителем токов ротора в осях статора, входы которого подключены к датчикам фазных токов и напряжений статора, а вьосоды соединены с одними входами дополнительного координатного преобразователя, другие входы которого связаны с выходами координатного преобразователя, другие входы которого подключены к датчику фазных токов ротора, при этом выход дополнительного координатного преобразователя связан с входом блока нормирования. Устройство может быть снабжено блоком нормирования, дополнительным координатным преобразователем, определителем токов статора в осях ротора и датчиком фазных напряжений ротора, выход которого и ёыход датчик фазных токов ротора соединены с входами определителя токов статора в осях ротора, .выход которого подключен к одним входам дополнительного координатного преобразователя, к другим входам которого под соединены выходы координатного преобразователя, при этом выход дополнительного координатного преобразователя соединен с входом блока нормирования. Кроме того, устройство может быть также снабжено, датчиком составляющих скорости Изменения опорного параметра ротора и блоком апериодических звеньев, входы которого связаны с выходами датчика составляющих скороети изменения опорного параметра рот ра и блока нормирования. Помимо этого, устройство может быть снабжено третьим координатным преобразователем,одни входы которого связаны с выходами датчика составляюпщх скорости изменения опорног параметра ротора, а другие - с входа ми блока апериодических звеньев. На фиг. 1-4 представлены .структур ные схемы, поясняющие выполнение пер вого варианта устройства для формиро вания составляющих опорного параметра ротора; на фиг. 5- 7 - структурн схемы других вариантов вьшолнения устройства; на фиг. 8 - пространст венная векторная диаграмма токов (ам первитков) асинхронной машины с фазным ротором. Устройство содержит датчик 1 фазных датчик 2 фазных токов статора ij составляющих напряжений U, датчик 3 фазных составляклцих тока ротора i fv (фиг. 1-3). В определителе 4 составляющих опорного параметра ротора про изводится преобразование фазных вели чин, поступающих от датчиков 1,2 и 3 В блоке 5 (фиг. 2), входы которого под|слючены к выходам датчиков фазных токов и напряжений ротора, производится определение скорости изменения опорного параметра ротора. Выход блока 5 соединен с блоком 6 апериодических звеньев и одним из входов формирователя 7 скольжения, другой вход которого подключен к выходу блока 6. Датчик 8 (фиг. 4) фазных составлянмцих ориентирующего параметра статора своим выходом связан с входом первого координатного преобразователя 9, выход которого подключен к входу формирователя 10 составляющих тока ротора в синхронных осях. Второй координатный преобразователь 11 одними входами связан с выходом формирователя 10, а своим выходом связан с входом блока 12 нормирования. Формирователь 13 (фиг. 5) фазных токов ротора на частоте токов статора своим выходом подключен к одному из входов второго координатного преобразователя 11, выход которого связан с входом первого координатного преобразователя 9,.выход которого подключен к входу блока 12 нормирования. Вькод координатного преобразователя 9 (фиг. 6) подключен К входу координатного преобразователя 11, выход которого связан с входом статора на частоте токов ротора своим выходом подключен к одним входам координатного преобразователя 11. Устройство работает следующим образом. Определим аналитические выражения, связывающие фазные токи статора и ротора, между собой и с составляющими этих токов в синхронных осях сС и /3 , вращающихся с угловой скоростью ojg поля статора (фиг. 8). Рассматриваются установившиеся режимы работы асинхронной машины с фазным ротором, которые характеризуются синусоидальными токами и напряжениями фаз машины. Числа витков фазных обмоток статора и ротора принимаются равными между собой. При управлении асинхронной машиной с фазным ротором выбирается ориентирукнций параметр статора. Таким параметром может быть либо напряжение статора, либо ток статора, либо полное потокосцепление статора, либо намагничивающий (реактивный) ток статсфа. Для конкретности рассмотрения за ориентирующий параметр статора выбирается реактивный ток i gjj статора. С направлением этого тока совпадает направление оси /з (фиг. 8). Вектор тока igp вращается со скоростью U/5 (фазовый угол Ч ) относительно фазных обмоток статоа - осей g, f. Вектор полного тока i, намагсовпадающий. с осью /з раничивания, вен i-p J) IrC , реактивный ток ротора (ток где i намагничивания, поступаю щий со стороны ротора), совпадающий с осью уь ; величина тока намагничивания асинхронной машины; величина тока намагничивания статора; величина тока намагничивания ротора. Вектор тока i,, вращается относиельно осей d, q связанных с ротоом, со скоростью и (фазовый угол -j-). си d, q вращаются относительно осей g, f со скоростью SH фазовый угол б (фиг. 8). Токи ig и 1р содержат активные для которьк составляющие справедливо Sft rw rw Э« W ; где Эл величина активного тока статора (ротора). Выражения (1) и (2) вытекают из принципа работы асинхронной машины с фазным ротором, при этом ток определяется в основном напряжением питающим статор. Ориектируюо(Ий параметр статора формируется в блоке 8 (фиг. 4) из напряжения и с и тока « . ОЭ статора, которые поступают в блок 8 в виде измеренных фазных напряжений и токов. Обычно пользуются нормированным (с единичной амплитудой) ориен тирующим параметром i. статора, сов падающим по направлению с осью /3 . Для амплитуд векторов ic,|H L(,,KOT рые составляют.этот единичный вектор в осях g, f Опорным параметром ротора являет ся вектор . Обычно используют нор мированный опорный параметр Т Q рото ра. На фиг. 8 этот вектор совпадает с ориентирукнцим параметром статору однако для амплитуд векторов i которые составляют опорный параметр ротора в осях q, d имеем
(4)
у
io
V« Jс учетом сказанного и в соответствии с фиг. 8 имеем следующие уравнения:для фазных токов ротора
Ц -lrBsinj-+ Iflcosy
(5) d Ifisi для фазных токов статора
i 3 Sin f3QCOSf ,jj|S.,
у Jg jCos OgSin ()cosf-Jgsin%
при этом имеем
1+6 4(7)
Величину 1. либо принимают постоянной, либо вычисляют в процессе
) ЧН
(8) а ЪГ iflif f j
где фазные составляющие ориентирующего параметра статора формируются блоком 8, а фазные .токи статора измеряются датчиками 1 тока (фиг. 1).
В соответствии с выражениями (1) и (2) в блоке 10 определяются составляющие тока ротора в синхронных осях d. t , для чего в этом блоке используется величина I. тока иамагничивания которая либо принимается постоянной.величиной, либо определяется в процессе р аботы асинхронной машины по результатам измере5 НИН напряжения U и тока ig
/ч -ISB.I
o(9) их управления асинхронной машиной, при этом используют информацию от датчика 2 о напряжении U питания статора. Фазные токи статора и ротора измеряются датчиками 1 и 3 (фиг. 2). Уравнения (5), (6) и (7) вместе с уравнениями (1), (2) и (3) составляют- систему уравнений, на основе которой можно аналитически показать существо преобразований, которые необходимо производить с фазными токами ротора (5) и статора (6) и с фазными составляющими ориентирующего параметра статора (3) для получения фазных составляющих опорного параметра ротора (4). В блоке 8 (фиг. 4) формируются фазные составляющие ориентирующего параметра статора в соответствии с вьфаясением (3) . Для этого определяются фазные напряжения статора, соответствуюоще фазным потокосцеплениям статора, путем IR-компенсации. Затем производится интегрирование полученных фазных напряжений. Требуемые гармонические функции sinV и cosV (фазные составляю щие ориентирующего параметра статора) получаются при нормировании результатов интегрирования - путем деления на амплитуду. В блоке 9 (первый координатный преобразователь) ток i статора сравнивается с током 1 по правилам координатных преобразований - определяются составляющие тока статора в синхронных осях ot , р 911 Из выражения (5) для фазных токов ротора находим составляющие sin-у и cos у опорного параметра ротора, испрльзуя полученные из статорной цепи значения 1 и - выражение (9), а также измеренные датчиком 3 фазные токи io и ij ротора. Сначала в координатном преобразователе 11 производятся операции с составляющими тока ротора в. соответствии с вьфажениями о dhD- Ira)sinT ic IrftldO) ( id-IbD-HW Затем в блоке 12 нормирования получают грубые составляющие sin /jp и cosy опорного параметра ротора путем деления выходных сигналов координатного преобразователя 11 на их амплитуду
d rQS f-D
3 +3 D га
(ff)
J.2 .32
i-D ru На практике роль первого координатного преобразователя 9 выпол; няют фазочувствительные выпрямители, опорными сигналами для которых . служат фазные напряжения статора, а входными - фазные точки статора. Сигналы на выходе блока 12 нормирования содержат, как правило, вы сок очас т пульсации, которые в ряде практических задач препятствуют получению высокого качества уп равления асинхронной машиной. Поэто му эти сигналы желательно профильтровать, не внося при этом запаздывания (фазового сдвига) в контур получения sinj и cos . Для решения этой задачи поступаю следующим образом. Выходные сигналы блока 12- (выход ные сигналы sin и cos-jp электронного определителя грубых составляю4 дих опорного параметра ротора) пропускают через фильтры с большой пос тоянной времени. Чтобы скомпенсировать искажения выходных сигналов блока 12, производимые этими фильтр ми, на их входы подают сигналы, про порхщональные скорости изменения со тавляющих опорного вектора.
iooLCllM
1 + pT
(13|
M
W
-f+pT
otv t+pT 9 Датчик 5 составляющих скорости изменения опорного параметра (иг. 2) ротора подключен к датчикам 2 и 3 напряжения и тока ротора. На выходе датчика 5 формируется ЭДС ротора Е Ы sin-j- kp i . л1ГЧ,Д OJ.11.II - IS,l JL -4f, ,% k,jcos2r kpioj J где k - коэффициент пропорциональp - оператор. Фазные составляющие ЭДС ротора поступают в блок 6 апериодических звеньев, куда поступают также грубые составляющие опорного параметра ротора ij, и iflo от блока 4. Апериодические звенья блока 6 вьшолняют роль фильтров, на входах которых суммируются сигналы от блоков 4 и 5. На выходах блока 6 имеем Т - постоянная времени фильтров (апериодических звеньев). При выборе Т К имеем Iod i« Чя при этом полученные составляющие опорного параметра ротора не содержат пульсаций и могут быть использованы для получения высококачест- . венного регулирования. В блоке 7 (фиг.3) сравниваются сос.d« ЕС составляющитавлякяцйеifld , ми F ЕцЫ- EW io. (15) После подставки в выражение (15) сигналов согласно вьгражениям (12) и (14) имеем сигнал F j kycos.-jpcos-j-+k-jrsinjsin ky, (16) который пропорционален скольжению НЬ ротора. Сигнал j используется при регулировании скорости ротора асинхронной машины. Варианты устройства для формирования составлякицих опорного параметра ротора асинхронной мащины с фаз11ным ротором, представленные на фиг. 5 и 6, отличаются от варианта, представленного на фиг, 4, очередностью проведения преобразований с ijj, icj и ij.. При этом в этих вариантах в блоке 13 формируется ток ротора частоте тока ртатора. Для этого сначала в .блоке 13 вычисляют ток i.. v& V Затем формируют ток ротора на частоте статора if-s . Vg{-i -i;Uf -1м)СОРЧ- IftsinH-,) W ) Ha фиг. 5 в блоке 11 координатны преобразования ведутся в соответстВИИ с выражениями (rD.a) d/Vs c3-Vs V-()-. где токи ij-JF токи ротора в осях, вращающихся со скоростью В блоке 9 координатные преобразования ведутся в соответствии с в ражениями () XTorVo rV al После нормирования в блоке 1 L им ем на выходе блока 4 (фиг, 5) грубы (с пульсациями) составляющие sin |р и cos Tf опорного параметра ротора В координатном преобразователе 9 (фиг. 6) сравниваются токи и. а полученные результаты сравниваются в кооцдинатном преобразователе с током с выхода блока 13. Сигналы с выхода преобразователя 11 по тупают в блок 12 нормирования, на выходе которого получаем грубые составляющие sin у и cos у опорного параметра ротора. В вариантах устройств согласно фиг. 4, 5. и 6 для координатных преобразований используются фазные напряжения статора. При использова для этих же целей фазных напряжени ротора структуры устройств остаютс аналогичными. 9 В устройстве, вариант которого представлен на фиг. 7, содержится формирователь 14 фазных токов статора на частоте токов ротора. Выходы формирователя 14 связаны с датчиками тока и напряжения ротора. В формирователе 14 формируется сначала ток намагничивания асинхронной машины на частоте токов ротора, а затем он вычитается из тока ротора и формируется ток . статора на частоте токов ротора. Ток Tjh в координатном преобразователе 11 сравнивается с сигналами с вьtxoдa координатного преобразователя 9, в котором сравниваются токи ig и ij,. Сигналы с выхода преобразователя 11 поступают в блок 12 нормирования, на выходе которого формируются грубые составляющие sin и cos J опорного параметра ротора. Составляющие sin у и cos-j- опорного параметра ротора, формируемые в устройствах согласно фиг. 4-7, используются для получения сигналов управления силовым преобразователем энергии, питающим роторные обмотки асинхронной машины. Упомянутые сигналы управления формируются на выходах координатного преобразователя (не показан). На одни входы этого координатного преобразователя поступают сигналы sin у и cos|- от предлагаемого устройства, а на другие сигналы либо с выходов регуляторов активного и реактивного токов ротора, либо от задатчиков активного и реактивного ротора в зависимости от выполнения силового преобразователя энергии. Сигнал -j- от блока 7 используется в качестве сигнала обратной связи по скольжению ротора и обеспечивает регулирование числа оборотов асинхронной маншны. Таким образом, в предлагаемом устройстве требуемые для управления асинхронной машиной с фазным ротором параметры sinr, cos-j- и -у формируются по результатам замеров токов и напряжений асинхронной машины без применения электромеханических датчиков угла и скорости. Предлагаемое устройство в отличие от прототипа не содержит сложной автоколебательной схемы, построенной на прецизионных элементах, и поэтому является более простыми по составу, связям и настройке.
ts
и
tf
Sin), cos/ .
. иг.З
Is
Us
ir
r11
Siny COS/ игЛ
Sin/, cos
j.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США К« 3859578, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1976 |
|
SU675567A1 |
