,1
Изобретение относится к электротехнике и может быть использовано в электроприводах с частотно-токовым управлением синхронным двигателем в .случаях, когда возможно реализовать электронный датчик двойного угла поворота продольной оси ротора двигателя, а электромеханический датчик одинарного угла поворота этой оси разместить невозможно.
Цель изобретения - повышение точности формирования опорных сигналов
На чертеже изображена структурная схема устройства для формирования опорных сигналов.
Устройство содержит датчик 1 двойного угла поворота продольной оси ротора синхронного двигателя с выходами синусоидального и косинусо- идального напряжений, датчик 2 фазных ЭДС, генератор 3 частоты с входами управления, с входами коррекции и с выходами синусоидального и косину соидального напряжений, блоки 4-6 умножений, масштабньш усилитель 7, сумматор 8 с суммирующим и вычитающим входами, блок 9 преобразования фазных составляющих с двумя парами входов, выход которого подключен к входу управления генератора 3. Выходы датчика 2 фазных ЭДС соединены с входами коррекции генератора 3, выход синусоидального напряжения которого подключен к входам блока 4 умножения и к одному из входов блока 6 умножения, другой вход которого соединен с выходом косинусоидально- го напряжения генератора 3. Выход косинусоидального напряжения генератора 3 подключен также к входам блока 5 умножения, выход которого соединен с суммирующим входом сумматора 8, вычитающий вход которого соединен с выходом блока 4 умножения. Выход блока 6 умножения через масштабный усилитель 7 и выход сумматора 8 подключены к одной паре входов блока 9, другая пара входов которого соединена с выходами датчика 1 двойного угла поворота. Входами устройства в целом являются входы датчиков 1 и 2, а выходами - выходы синусоидального и косинусоидального напряжений генератора 3.
Устройство работает следующим образом.
ГненераТор 3 должен формировать сигналы
192252
и К . cos c
Up К . sine/
(1)
где К - масштабный коэффициент;
0 - угол, характеризующий угловое положение продольной оси синхронного двигателя, упр-1вление которым необхо- димо осуществлять.
Сам по себе генератор 3 может . сформировать только сигналы
15
и,. К cos oL и К . sinoL
(2)
гдeJL/ - некоторьй произвольный аргумент.
Информация, которая должна воздействовать на генератор 3 с целью изменения аргумента до значения угла 0 поворота ротора синхронной машины, поступает на входы управления и коррекций генератора 3. На входы коррекции поступают фазные ЭДС синхронного двигателя, наводимые продольным потокосцеплением ротора.Эти ЭДС поступают с выходов датчика 2
Е - K sin oi t Е ai cos . oi t
(3)
где 0 - частота вращения ротора синхронного двигателя.
Датчик 2 фазных ЭДС в одном из распространенных на практике вариантов представляет собой многофазную измерительную обмотку, размещенную в пазах синхронного двигателя. Число фаз измерительной обмотки может быть два, три и более.
Для конкретности и простоты изложения на чертеже датчик 2 имеет два выхода и подразумевается, что он содержит двухфазную измерительную обмотку. Соответственно подразумевается и двухфазное исполнение генератора 3 с двумя входами коррекции так что число фаз генератора 3 не является принципиальным для работоспособности предлагаемого устройства.
На вход управления генератора 3 поступает сигнал 4U в виде постоянного напряжения, которое определяет выходную частоту о генератора.Если аргумент о напряжений U и U на
будем иметь на выходе блока ния 4
выходах генератора не равен требуемому углу oi , то воздействуя сигналом ли управления на вход управления, изменяют частоту о1 генератора и тем самым изменяют и сам аргумент дС ц.о тех пор, пока он не станет равным углу d . Воздействуя на генератор 3 по входу управления, решают задачу управления аргументом о в статических режимах работы (установка началь-fo на выходе блока умножения 6
Uj К2 , на выходе блока умножения 5 и К2 .
ных значении напряжении на интеграторах генератора) и в режимах с малыми частотами oi, пока величины фаз ньк ЭДС малы. Начиная с некоторых частот вращения d , когда величины |ЭДС становятся больше величины зоны нечувствительности фазных интеграторов генератора 3, фазные ЭДС, поступая на входы коррекции генератора 3 и интегрируясь фазными интегра- торами генератора, обеспечивают формирование выходных напряжений генератора 3 опорных сигналов в соответствии с требуемым углом d , это про
жение Uj, имеем и К2 sin 2oL Kjjsin 2ol. , К2 К,
(10)
где
В исходит потому, что фазные ЭДС со- 25 7, на вход которого поступает напря- держат информацию о требуемом угле d,
С учетом рассмотренной работы генератора 3 можно сказать, что узлы 1,4,5-9 предназначены для формирования сигнала ли управления. В сово- 30 купности с генератором 3 эти узлы образуют электронную следящую систему, при этом датчик 1 играет роль задающего устройства, узлы 4-8 выполняют роль датчика сигналов обрат- ной связи, блок 9 вьтолняет роль узла сравнения (дискриминатора), а сам генератор 3 играет роль исполнительного устройства.
Так как датчик 1 (задающее уст- 40 ройство) формирует информацию о двойном угле oi и на его выходах имеем
Напряжения U и U являются фаз- составляющими вектора, по которым можно определить арх умент генератора 3.
Пара напряжений U и IL на выходе датчика 1 образует фазные составляющие вектора задания, определяющего угол поворота d ротора. Напряжения и , и J и и, и поступают на входы преобразователя 9 фазных составляющих, выполняющего роль фазового .дискриминатора - устройства, выявляющего разность
и К JJ sin 2 о/ ; и KQ COS 2 d ,
(4) 45
где К - масштабный коэффициент, то и узлы 4-8 (играющие роль датчика сигналов обратной связи) должны формировать сигналы
и Кр sin 2d ;
и Kjj COS 2d
(5)
из сигналов генератора 3. Принимая во внимание то, что на выходах генератора 3 имеем напряжения U и U
будем иметь на выходе блока умножения 4
на выходе блока умножения 6
выходе блока умножения 6
Uj К2 , выходе блока умножения 5 и К2 .
(6)
(7)
К2
и К2 sin с( |- sin 2л . (8)
Напряжение U поступает на сум- мирующий вход сумматора 8, а U, - на вычитающий вход, при этом на выходе сумматора 8 имеем
и KMcos V- sin) К2 cos 2 : Кд cos 2oi ,
(9)
где К2 к
И
На выходе масштабного усилителя
жение Uj, имеем и К2 sin 2oL Kjjsin 2ol. , К2 К,
(10)
где
В 7, на вход которого поступает напря-
Напряжения U и U являются фаз составляющими вектора, по которым можно определить арх умент генератора 3.
Пара напряжений U и IL на выходе датчика 1 образует фазные составляющие вектора задания, определяющего угол поворота d ротора. Напряжени и , и J и и, и поступают на входы преобразователя 9 фазных составляющих, выполняющего роль фазового .дискриминатора - устройства, выявляющего разность
2 - 2d 2((/- d) 2udНа выходе устройства 9 появляется сигнал
50
uU Kj . л.(11)
55
.где масштабньш коэффициент.
В преобразователе 9 выходной сигнал ли формируется в соответствии со следующим выражением:
4U sin 2о cos 2oi - sin 2o cos Id sin(2oi - 2о)-2(о(: -a )::: 24oi . (12)
Как уже говорилось,dU воздействует на частоту з( генератора 3 и изменяет ее до тех пор, пока аргумент d не станет равным углу поворота d
Таким образом, как в статических, так и в динамических режимах работы устройство обеспечивает формирование на выходах генератора 3 фазных напряжений, аргумент которых оказывается рЗв йлм углу 0 поворота ротора. Повы- шение формирования опорных сигналов (фазных напряжений на выходе генератора 3) достигается за счет того, чт в устройстве применены аналоговые блоки: генератор, умножители, сумма- тор и т.д. При этом выходные напряжения генератора 3 на основе интеграторов являются плавно меняющимися величинами, что и определяет плавность, непрерывность, а следователь- но, и повышенную точность выходных опорных напряжений (сигналов) устройства.
Формула изо
ретения25
Устройство для фop oиpoвaния опорных сигналов управления синхронным двигателем, содержащее датчик двойного угла поворота продольной оси ротора с выходами напряжения синусоидальной и косинусоидальной формы, отличающееся тем, что, с целью повышения точности формирования опорных
U
Составитель А.Головенко Редактор А.Сабо Техред В.КадарКорректор М.Шароши
Заказ 2526/53 Тираж 660Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
5 fOt5 20
25
30
сигналов, введены датчик фазных ЭДС, генератор частоты с входом управления, входами коррекции и с выходами напряжения синусоидальной,и косинусо- идальной формы, три блока умножения, масштабный усилитель, сумматор с суммирующим и вычитающим входами и блок преобразования фазных составляющих с двумя парами входов, выход которого подключен ко входу управления генератора частоты, к входам коррекции которого подсоединены выходы датчика фазных ЭДС, выход напряжения синусоидальной формы генератора частоты соединен с входами первого блока умножения и с одним из входов второго блока умножения, другой вход которого и входы третьего блока умножения соединены с выходом напряжения косинусоидальной формы генератора частоты, выход первого блока умножения подключен к вычитающему входу сумматора, к суммирующему входу которого подключен выход третьего блока умножения, выход второго блока умножения подключен ко входу масштабного усилителя, выход которого и выход сумматора соединены с одной парой входов блока преобразования фазных составляющих, к другой паре входов которого подключены выходы датчика двойного угла поворота продольной оси ротора.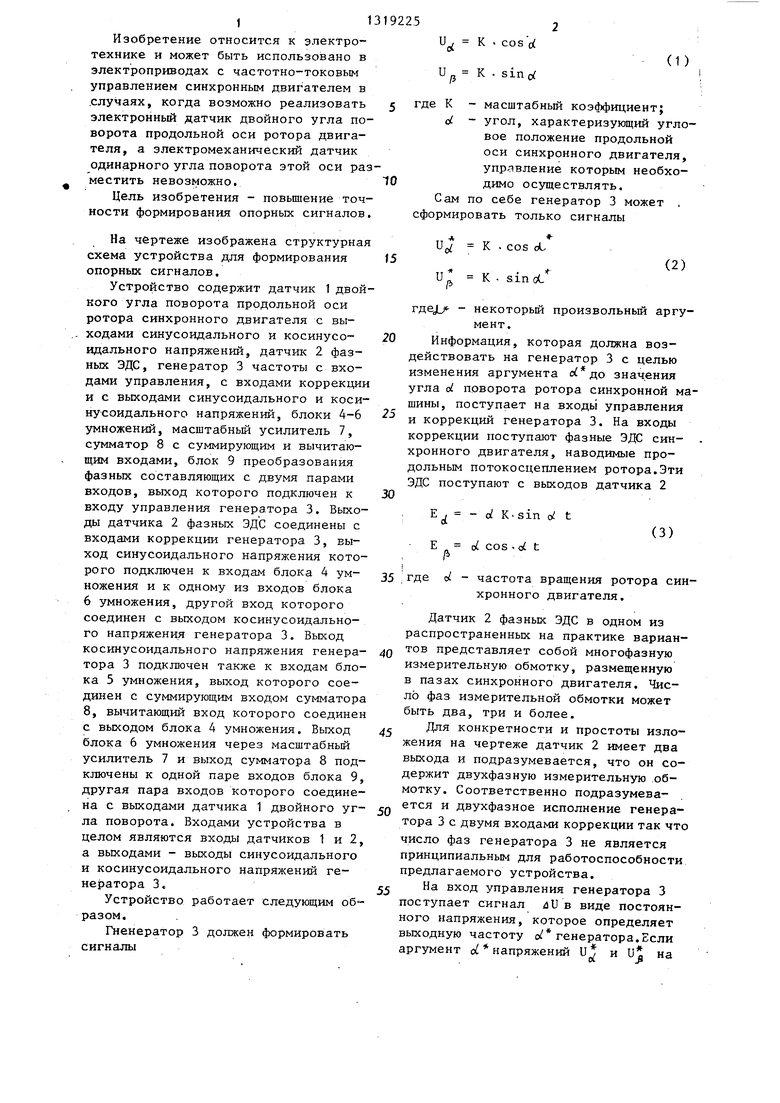


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины | 1987 |
|
SU1636978A1 |
| Устройство для определения углового положения вала двухфазного синхронного двигателя с магнитной асимметрией ротора | 1988 |
|
SU1640808A1 |
| Формирователь опорных сигналов для управления синхронным электродвигателем | 1982 |
|
SU1061229A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Устройство для измерения угловых ускорений | 1975 |
|
SU546823A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Электропривод | 1973 |
|
SU888312A2 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение точности формирования опорных сигналов. Устройство для формирования опорных сигналов управления синхронным двигателем содержит датчик 2 фазных ЭДС и датчик 1 двойного угла поворота ротора синхронного двигателя. Выходы датчика 1 соеSJ § динены с корректирующими входами генератора 3 частоты, управляющий вход которого подключен к выходу блока 9 преобразования фазных составляющих. Две пары входов блока 9 подключены к выходам датчика 1. Выход синусоидального напряжения генератора 3 связан с входами блока 4 умножения и одним входом блока 6 умножения. Выход косинусоидального напряжения генератора 3 соединен с входами блока 5 умножения и другим входом блока 6. Выходы блоков 4 и 5 соединены соответственно с вычитающим и суммирующим входами сумматора 8. Выход блока 6 через масштабный усилитель 7 и выход сумматора 8 подключены к другой паре входов блока 9. Устройство обеспечивает формирование в статических и динамических режимах работы фазных напряжений на выходах генератора 3, аргумент которых оказывается равным углу поворота ротора синхронного двигателя. 1 ил. с fS (Л со 00 N9 ND СЛ
| Способ пуска синхронного двигателя | 1981 |
|
SU1086534A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1981 |
|
SU1014117A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
