Изобретение относится к лесному машиностроению и может быть использовано в лесном хозяйстве при обработке растущих деревьев (срезание нижних ветвей при уходе за деревом, обрезка кроны при ландшафтной лесообработке, заготовка черенков с элитных деревьев и др.) и при заготовке сортиментов непосредственно со стоящих деревьев, отведенных в рубку, последовательно сверху вниз (вначале срезание сучьев и крон, затем спиливание вершинного сортимента и т. д. ). С незначительными изменениями предлагаемый манипулятор может быть использован в сельском хозяйстве, на выборочных рубках деревьев в парках, садах и защитных лесах, а также в других отраслях народного хозяйства.
Известен манипулятор для обработки деревьев по патенту DE 2606179 A1, включающий телескопическую стрелу с двухзвенниками, устанавливаемыми на каждой подвижной секции телескопической стрелы и имеющими индивидуальный гидроцилиндр. Преимуществом является автономность выдвижения каждой из подвижных секций телескопической стрелы собственным гидроцилиндром, что позволяет управлять траекторией перемещения рабочего органа. Однако, недостатком является сложность управления множеством гидроцилиндров при наводке на заданное место на растущем дереве, а также сложность конструкции из-за использования большого количества гидроцилиндров.
Известен также манипулятор для обработки деревьев (см. книгу: Мазуркин П.М. Поисковое конструирование лесотехнического оборудования. - Саранск: издательство Саратовского университета Саранский филиал 1990. - с. 262, рис. 151), содержащий телескопическую стрелу, шарнирно-сочлененную ферму из взаимносвязанных двухзвенников, гидроцилиндр перемещения подвижных секций телескопической стрелы.
Недостатком манипулятора является произвольность перемещения отдельных подвижных секций относительно друг друга, что допустимо при валке деревьев и недопустимо при обработке растущих деревьев. При этом аналог, показанный в конструктивном варианте, обладает пятью избыточными степенями свободы (по формуле Чебышева ω = 3n - 2p5-p4 = 3 • 12 - 2 • 15 - 0 = 36 - 30 - 0 = 6). Эта избыточность не влияет на работу захватно-срезающего органа (при валке дерева) или срезающего дискофрезерного (дисконожевого) органа (при скашивании кустарника и тонкомерных деревьев в ходе осветления и прочистки леса). Однако, при точечной ориентации рабочего органа (срезка ветви дерева на заданном месте и др.) избыточная степень свободы манипулятора становится существенным недостатком.
Технический результат - повышение точности функционирования манипулятора при обработке растущих деревьев.
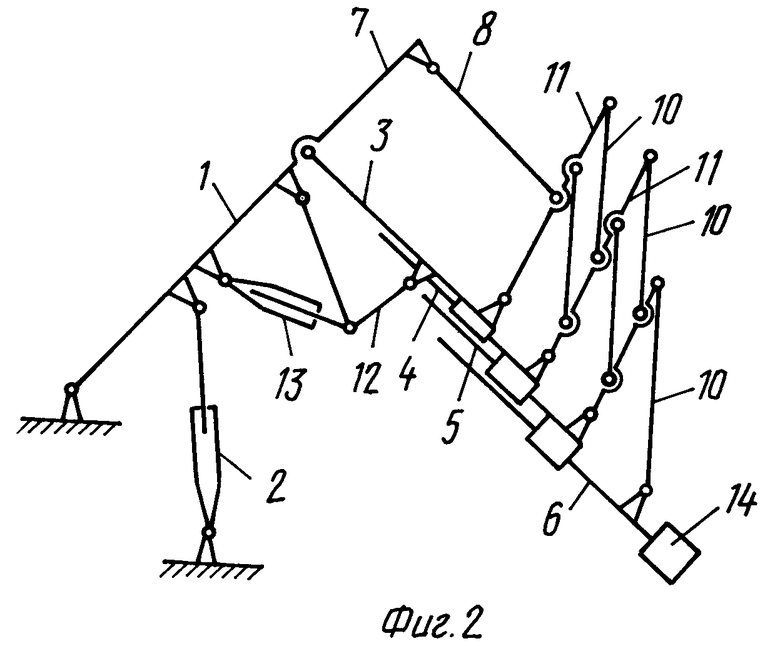
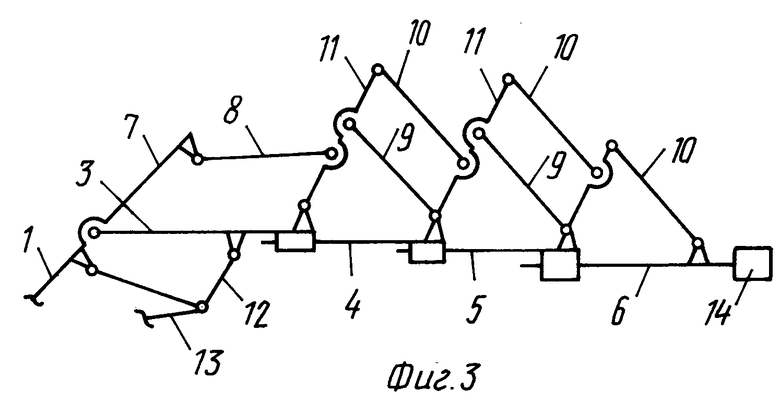
На фиг. 1 показана схема конструкции манипулятора для обработки деревьев (при вытянутом положении подвижных секций); на фиг. 2 - то же, при втянутом положении секций; на фиг. 3 - схема соединения телескопической стрелы с шарнирно-сочлененной фермой.
Манипулятор машины для обработки деревьев включает основную стрелу 1, закрепленную шарнирно на платформе машины, гидроцилиндр 2 поворота манипулятора. К основной стреле шарнирно прикреплена опорная секция 3 телескопической стрелы с подвижными секциями 4, 5, 6. На конце 7 основной стрелы шарнирно закреплена тяга 8, соединенная шарнирно с шарнирно-сочлененной фермой. Ферма содержит двухзвенники. Каждый двухзвенник, кроме последнего, снабжен дополнительным звеном 9, которое установлено параллельно второму звену 10 двухзвенника и соединено с первым 11 поворотным звеном соседнего двухзвенника для образования пантографа.
Шарнирно-сочлененная ферма и телескопическая стрела совместно образуют общую рукоять, которая шарнирно связана с основной стрелой с помощью двухзвенника 12, а между ними и основной стрелой установлен гидроцилиндр 13 поворота рукояти.
На конце рукояти установлен рабочий орган 14.
Одним из наилучших вариантов соединения телескопической стрелы с шарнирно-сочлененной фермой является конструкция, в которой дополнительное звено 9 предыдущей подвижной секции 4 своим вторым концом установлено в шарнире, расположенном на конце последующей подвижной секции 5, поворотного звена 11. Аналогично соединены и другие звенья телескопической стрелы и шарнирно-сочлененной фермы. Это уменьшает габариты всей общей рукояти манипулятора, а также снижает общее количество шарниров.
Манипулятор машины для обработки деревьев работает следующим образом.
Рабочий орган 14 необходимо доставить в некоторое заданное место дерева для последующей его обработки. Для этого поворотом платформы машины и гидроцилиндром 2 устанавливают основную стрелу 1, а затем выдвигают гидроцилиндр 13. При этом тяга 8 воздействует на шарнирно-сочлененную ферму, двухзвенники которой выдвигают подвижные секции 4, 5 и 6 относительно опорной секции 3 телескопической стрелы.
При втягивании штока гидроцилиндра 13 общая рукоять складывается в исходное положение.
Предлагаемое техническое решение позволяет исключить избыточные степени свободы общей рукояти и тем самым повышает точность обработки дерева.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2242115C2 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 1998 |
|
RU2141755C1 |
| ВАЛОЧНО-РАСКРЯЖЕВОЧНАЯ МАШИНА | 1992 |
|
RU2044466C1 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2002 |
|
RU2224417C2 |
| СТРЕЛОВОЕ УСТРОЙСТВО ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2001 |
|
RU2191740C1 |
| Мобильная валочно-сучкорезная машина | 1990 |
|
SU1824097A1 |
| ЗАХВАТНО-СРЕЗАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2142222C1 |
| МАШИНА ДЛЯ ТРЕЛЕВКИ | 2007 |
|
RU2348146C1 |
| МАШИНА ДЛЯ РУБКИ ДЕРЕВЬЕВ | 1990 |
|
RU2016505C1 |
Изобретение может быть использовано в лесном хозяйстве для обработки деревьев. Манипулятор содержит телескопическую стрелу, установленную на стреле шарнирно-сочлененную ферму из взаимосвязанных двухзвенников, гидроцилиндр перемещения подвижных секций телескопической стрелы. Каждый двухзвенник, кроме последнего, снабжен дополнительным звеном, которое установлено параллельно второму звену двухзвенника и соединено с первым поворотным звеном соседнего двухзвенника для образования пантографа. Конструкция манипулятора позволит повысить точность обработки деревьев. 3 ил.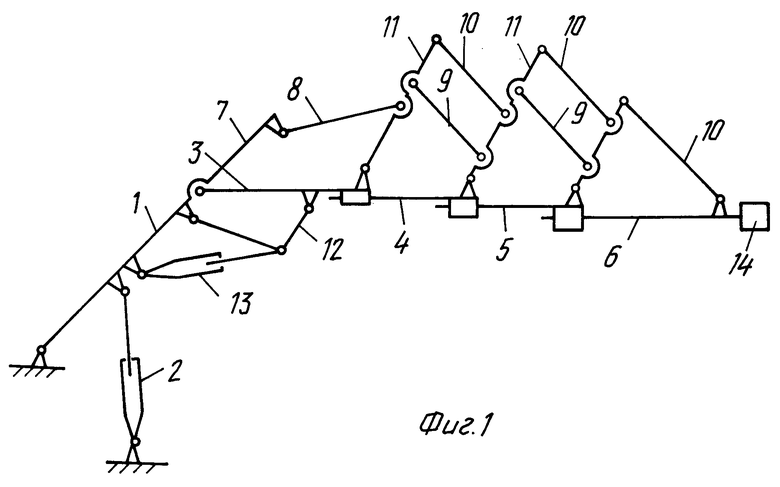
Манипулятор машины для обработки деревьев, содержащий телескопическую стрелу, установленную на стреле шарнирно сочлененную ферму из взаимосвязанных двухзвенников, гидроцилиндр перемещения подвижных секций телескопической стрелы, отличающийся тем, что каждый двухзвенник, кроме последнего, снабжен дополнительным звеном, которое установлено параллельно второму звену двухзвенника и соединено с первым поворотным звеном соседнего двухзвенника для образования пантографа.
| Мазуркин П.М | |||
| Поисковое конструирование лесотехнического оборудования | |||
| - Саранск, издательство Саратовского университета, Саранский филиал, 1990, с.262, рис.151 | |||
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2025950C1 |
| РУЧНОЙ КУХОННЫЙ ЭЛЕКТРОБЫТОВОЙ ПРИБОР С НАКЛАДНЫМ ЛИЦЕВЫМ ЭЛЕМЕНТОМ | 2013 |
|
RU2606179C2 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОИ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 0 |
|
SU178601A1 |
