Изобретение относится к областям судоподъема и разработки подводных месторождений.
Известен робот механической подводный, управляемый дистанционно для захвата поднятия и транспортирования груза, содержащий подводную лодку и захват, выполненный с двумя створками (а.с. СССР 1766777, B 63 C 7/08, 07.10.92).
Технический результат от использования изобретения заключается в увеличении глубины, с которой может быть поднят груз.
Этот технический результат достигается тем, что в роботе механическом подводном, управляемым дистанционно, для захвата, поднятия и транспортирования груза в мокрый док, содержащем подводную лодку и захват, выполненный с двумя створками, последние выполнены полуцилиндрическими и с рычагами их открытия и закрытия, причем створки с рычагами соединены шарниром в виде стержня, проходящего внутри втулок, приваренных к рычагам створок. На верхних концах рычагов закреплены кольца, соединенные цепями с проушинами, приваренными к подводной лодке. На нижних концах створок расположены шаровые облегчители смыкания в виде свободно вращающихся шариков. Каждая створка с рычагами выполнена из отдельных труб круглого или прямоугольного поперечного сечения, соединенных между собой через приваренные к их концам соединительные вставки, причем герметичные полости этих труб заполнены жидкостью легче воды. На боковых сторонах створок и к подводной лодке закреплены оболочки аэроподъемников, надуваемые подогретым воздухом через шланги компрессором, расположенным в подводной лодке, выполненной из отдельных, соединенных между собой сварными швами кольцеобразных труб круглого или прямоугольного поперечного сечения, полости которых заполнены жидкостью легче воды. Кроме того в подводной лодке на противоположных ее концах размещены двигатель внутреннего сгорания, работающий на бензине или спирте, и электродвигатель. Снизу к подводной лодке закреплена заполненная жидкостью легче воды емкостью, с боковых сторон которой расположены электромагниты для удержания створок захвата в открытом положении.
Компрессор может быть сообщен со шлангом подачи воздуха, намотанным на катушку на вспомогательном судне. Сверху подводной лодки могут быть закреплены три штуцера для соединения с намотанными на катушки на вспомогательном судне шлангами подачи в подводную лодку воздуха, бензина или спирта и отвода отработавших газов.
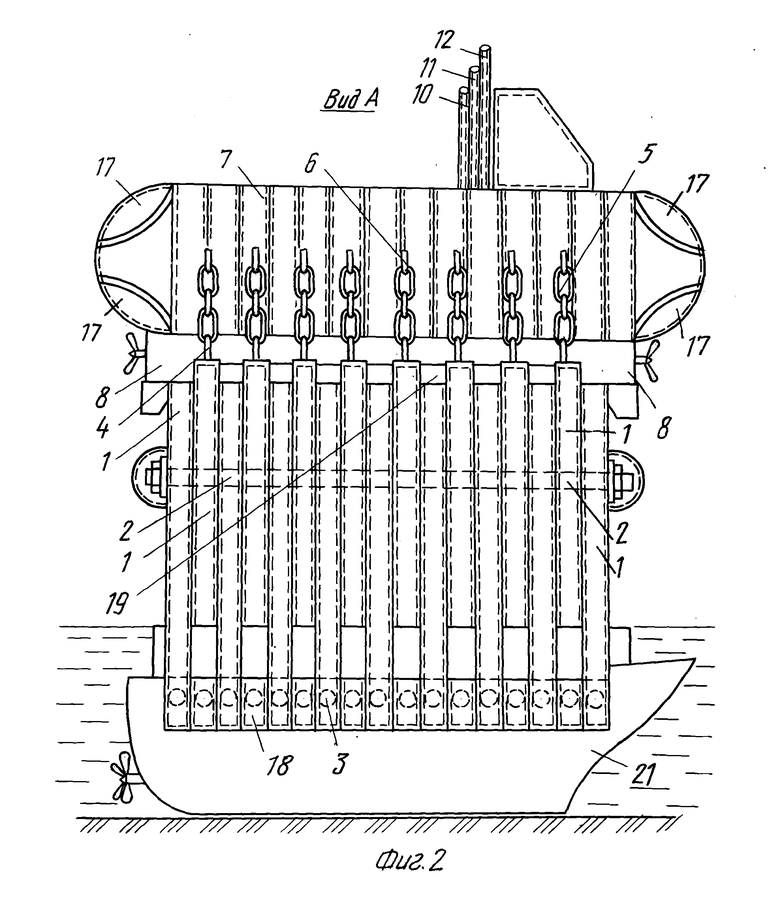
На фиг. 1 - общий вид робота; на фиг. 2 - вид А фиг. 1; на фиг. 3 - робот в процессе подъема груза.
Робот механический подводный содержит захват 1 с двумя створками и подводную лодку 7. Створки выполнены полуцилиндрическими и с рычагами их открытия и закрытия, причем створки с рычагами соединены шарниром в виде стержня 2, проходящего внутри втулок, приваренных к рычагам створок. На верхних концах рычагов закреплены кольца 4, соединенные цепями 5 с проушинами 6, приваренными к подводной лодке 7. На нижних концах створок расположены шаровые облегчители смыкания в виде свободно вращающиеся шариков 3. Каждая створка с рычагами выполнена из отдельных труб круглого или прямоугольного поперечного сечения, соединенных между собой через приваренные к их концам соединительные вставки 18, причем герметичные полости этих труб заполнены жидкостью легче воды. На боковых сторонах створок захвата 1 закреплены оболочки 14, а к подводной лодке - оболочки 13 аэроподъемников, надуваемые подогретым воздухом через шланги компрессором, расположенным в подводной лодке 7. Эта подводная лодка 7 выполнена из отдельных соединенных между собой сварочными швами труб круглого или прямоугольного поперечного сечения, полости которых заполнены жидкостью легче воды. Кроме того в подводной лодке, на противоположных ее концах, размещены двигатель внутреннего сгорания, работающий на бензине или спирте, и электродвигатель. Снизу к подводной лодке 7 закреплена заполненная жидкостью легче воды емкость 8, с боковых сторон которой расположены электромагниты 9 для удержания створок захвата 1 в открытом положении.
Кроме того, подводная лодка 7 может иметь иллюминаторы 17, а компрессор может быть сообщен со шлангом подачи воздуха, намотанным на катушку на вспомогательном судне. Сверху подводной лодки могут быть закреплены три штуцера для соединения с намотанными на катушки 16 вспомогательного судна шлангом 10 подачи в подводную лодку спирта или бензина, шлангом 11 подачи воздуха и шлангом 15 отвода отработанных газов.
При погружении робот механический подводный наводится на груз, например, затонувшее судно 21 с помощью размещенного на этом роботе оборудования. После соприкосновения захвата 1 с затонувшим судном 21 продолжающая погружение подводная лодка 7 надавливает боковыми стенками на рычаги створок захвата 1, которые, вращаясь относительно стержня 2 шарнира, раскрывают створки захвата 1, располагающиеся благодаря этому по разные стороны затонувшего судна. Затем всплывающая в результате медленного заполнения воздухом оболочек 13 аэроподъемника подводная лодка 7 натягивает цепи 5, которые начинают поворачивать рычаги захвата 1, смыкая тем самым створки этого захвата 1. После полного смыкания створок захвата 1 наполняют воздухом оболочки 14 аэроподъемника, придавая роботу с грузом положительную плавучесть. Воздух для наполнения оболочек может подаваться как по шлангу с надводного судна, так и из внутренних запасов подводной лодки 7 при автономном использование робота.
После всплытия робота с грузом его транспортируют в ближайший порт, где он разгружается в мокром доке с помощью раскрытия створок захвата 1. Для этого робот погружается на дно дока до полного раскрытия створок захвата 1. Затем включением электромагнитов 9 фиксируют створки в открытом положении и осуществляют подъем робота на поверхность.
При использовании этого робота для подъема полезных ископаемых торцы створок захвата 1 закрываются прочными сетками.

Робот механический подводный содержит подводную лодку и захват, выполненный с двумя полуцилиндрическими створками с рычагами их открытия и закрытия. Створки соединены шарниром, а рычаги створок соединены цепями с подводной лодкой, выполненной из соединенных между собой кольцеобразных труб, полости которых заполнены жидкостью легче воды. Каждая створка с рычагами выполнена из отдельных труб, соединенных через приваренные к их концам соединительные вставки, при этом полости труб заполнены жидкостью легче воды. На боковых сторонах створок и к подводной лодке закреплены оболочки аэроподьемников, надуваемые подогретым воздухом через шланги компрессором, расположенным в подводной лодке. Технический результат от использования изобретения заключается в увеличении глубины, с которой может быть поднят груз. 1 з.п. ф-лы, 3 ил.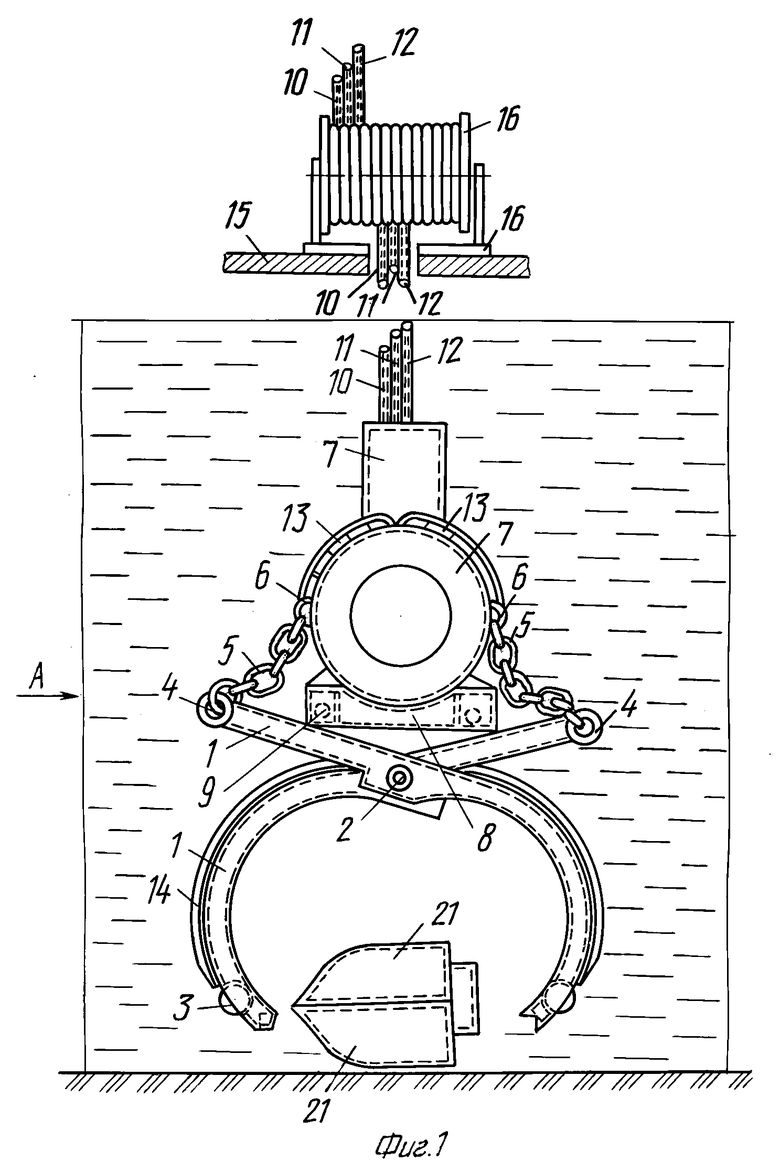
| Плавсредство для подъема затонувших объектов | 1990 |
|
SU1766777A1 |
| Погружное судно для подъема затонувших объектов | 1990 |
|
SU1807958A3 |
| US 3782317 A, 01.01.74. | |||

