Изобретение относится к спасательным средствам, обеспечивающим подъем затонувших объектов.
Известен подводный спасательный комплекс, содержащий подводную лодку, оснащенную средствами передвижения, погружения и всплытия со спасательным объектом (см. авт. свид. СССР N 1807958, кл. B 63 C 7/00, публ. 07.04.93 г. ).
Данный спасательный комплекс выбран в качестве наиболее близкого аналога изобретения.
Недостатком известного спасательного комплекса является невозможность поддерживать спасаемый объект на плаву для осуществления ремонта или осуществления перегрузки на другой надводный объект груза.
Техническим результатом изобретения является расширение функциональных возможностей подводного спасательного комплекса.
Он достигается тем, что подводный спасательный комплекс, содержащий подводную лодку, оснащенную средствами передвижения, погружения и всплытия со спасаемым объектом, дополнительно включает в себя вторую и третью подводные лодки, применяемые совместно с первой, причем корпус каждой из трех подводных лодок выполнен, например, из сваренных между собой торообразных колец, трубчатых в поперечном сечении, при этом на первой подводной лодке из труб выполнены решетчатые каркасы поддерживающего устройства по всей ее длине, соединенные между собой трубчатыми продольными элементами, снизу к ней прикреплены шарообразные пустотелые колеса, а в передней ее части закреплена пустотелая прямая лопата, поворачивающаяся вертикально на шарнирах или осях, вторая и третья подводные лодки оснащены бортовыми гребными винтами, вращающимися от силовых двигателей и установленными в патрубках, между патрубками гребных винтов по всей длине этих подводных лодок закреплены пустотелые ребра-консоли для поворота, подхвата, подъема и транспортирования спасаемого объекта, а между ребрами-консолями закреплены шарообразные пустотелые колеса, причем полости трубчатых торообразных колец корпусов подводных лодок, полости ребер-консолей, полости шарообразных колес, полости труб каркасов поддерживающего устройства и полости лопаты заполняются, например, жидкостью легче воды, а подводный спасательный комплекс оснащен известным радио-, теле-, компьютерным обеспечением автоматической его работы с видеозаписью всех процессов подводных работ, транспортирования спасаемого объекта и его выгрузки в мокром доке, а также оборудован поисковыми аппаратами, в том числе аппаратами инфракрасного видения.
В способе выполнения работ по спасению и поднятию затонувших объектов подводным спасательным комплексом, заключающимся в погружении комплекса в подводное положение в месте нахождения спасаемого объекта, первая подводная лодка при помощи лопаты очищает места вокруг спасаемого объекта от ила, после чего вторая и третья подводные лодки, работая бортовыми гребными винтами, поворачивают и подхватывают ребрами-консолями спасаемый объект с последующим установлением его в проектное положение, затем первая подводная лодка пристраивается снизу ко второй и третьей подводным лодкам, приподнявшим спасаемый объект, стыкуется и скрепляется с ними своими решетчатыми каркасами поддерживающего устройства с нижними поверхностями их ребер-консолей, после чего в таком положении при синхронной работе всех подводных лодок спасаемый объект транспортируется, например, в мокрый док.
Изобретение поясняется чертежами.
На фиг. 1 изображен подводный спасательный комплекс в сборе из трех подводных лодок;
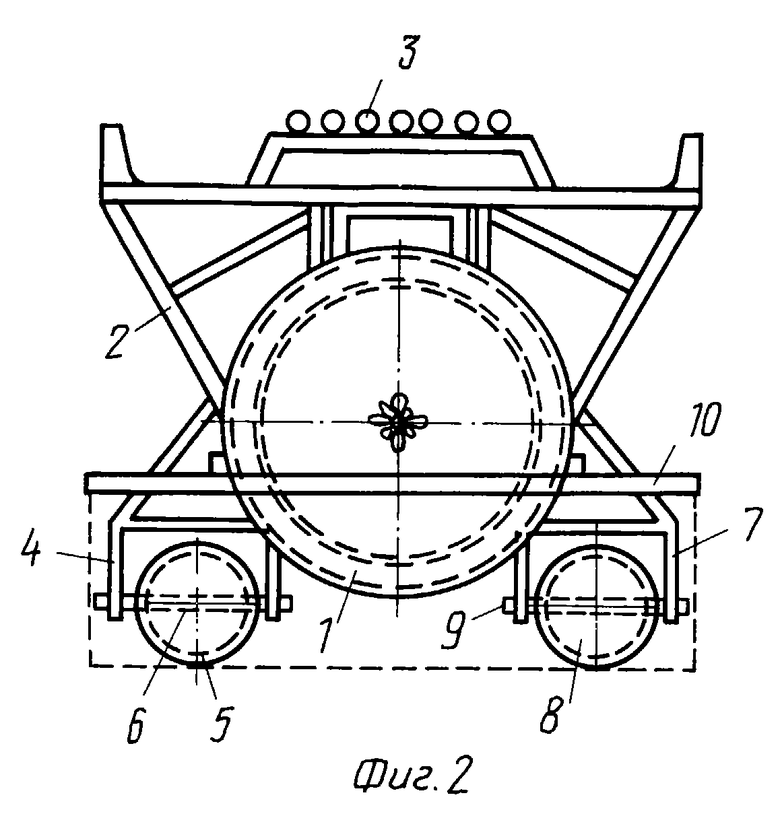
на фиг. 2 - первая подводная лодка, обеспечивающая очистку места у спасаемого объекта и поддержание его при подъеме и транспортировании двумя другими подводными лодками;
на фиг. 3 - вторая и третья подводные лодки;
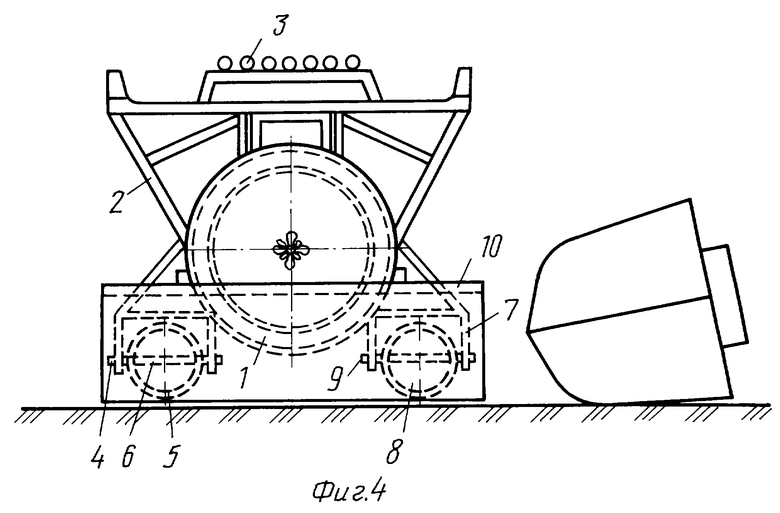
на фиг. 4 - первая подводная лодка с прямой лопатой, повернутой из горизонтального положения в рабочее вертикальное положение;
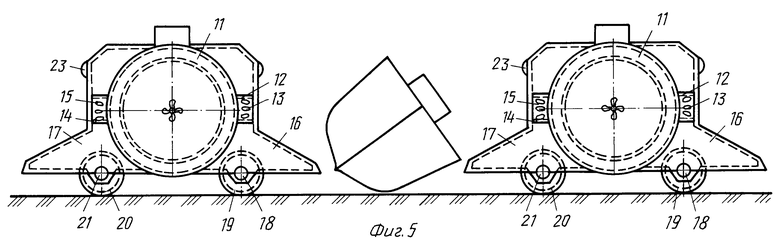
на фиг. 5 - вторая и третья подводные лодки, осуществляющие поворот спасаемого объекта в проектное положение;
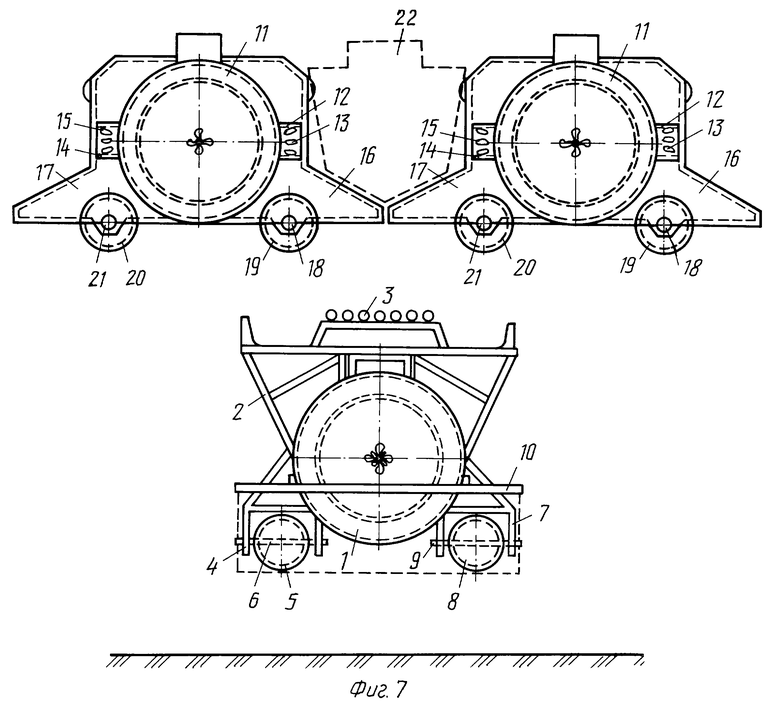
на фиг. 6 - удержание спасаемого объекта в проектном положении;
на фиг. 7 - подплытие первой подводной лодки ко второй и третьей подводным лодкам, приподнявшим спасаемый объект, для стыковки с ними.
Подводный спасательный комплекс включает в себя три подводные лодки. Корпус каждой из трех подводных лодок выполнен, например, из сваренных между собой торообразных колец, трубчатых в поперечном сечении. Первая подводная лодка 1 оснащена решетчатыми каркасами 2 поддерживающего устройства по всей ее длине, которые выполнены из труб 3. Снизу к подводной лодке закреплены элементы 4 и 7 крепления колес 5 и 8, которые выполнены шарообразными и пустотелыми. Колеса закреплены на осях 6 и 9. Спереди к подводной лодке 1 закреплена прямая лопата 10, поворачивающаяся на шарнирах либо осях вертикально в рабочее положение. Лопата 10 выполнена пустотелой.
С внешней стороны по бортам второй и третьей подводных лодок 11 закреплены патрубки 12 и 14, в которых размещены гребные винты 13 и 15, получающие вращение от силовых двигателей, размещенных внутри подводных лодок, в необходимом количестве, обеспечивающем создание усилия для поворачивания под водой спасаемого объекта 22. Между патрубками 12 и 14, закрепленными по всей длине подводных лодок 11, закреплены сваркой ребра-консоли 16 и 17 пустотелого вида, приваренные по всей длине подводных лодок для поворота, подхвата, подъема и транспортирования спасаемого объекта 22. Между ребрами-консолями 16 и 17 закреплены шарообразные пустотелые колеса 18 и 20, размещенные по всей длине подводных лодок 11 на осях 19 и 21.
Полости трубчатых торообразных колец корпусов всех подводных лодок, полости труб каркасов поддерживающего устройства, полости ребер-консолей, полости шарообразных колес и полость лопаты заполняются, например, жидкостью легче воды. Подводный спасательный комплекс оснащен известным радио-, теле-, компьютерным обеспечением автоматической его работы с видеозаписью всех процессов подводных работ, транспортирования спасаемого объекта и его выгрузки в мокрый док, а также оборудован поисковыми аппаратами, в том числе аппаратами инфракрасного видения.
Способ выполнения работ по спасению и поднятию затонувших объектов подводным спасательным комплексом заключается в следующем.
Подводные лодки 1 и 11 погружаются в подводное положение в месте нахождения спасаемого объекта 22. Первая подводная лодка 1 при помощи лопаты 10 очищает место вокруг спасаемого объекта 22 от ила.
После этого вторая и третья подводные лодки 11, работая бортовыми гребными винтами 13 и 15, поворачивают и подхватывают ребрами-консолями спасаемый объект 22 с последующим установлением его в проектное положение. Подводные лодки 11 приподнимают спасаемый объект 22, а подводная лодка 1 пристраивается к ним снизу, стыкуется и скрепляется с ними своими решетчатыми каркасами 2 с нижними поверхностями из ребер-консолей. В таком положении при синхронной работе всех подводных лодок спасаемый объект 22 транспортируется, например, в мокрый док.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 1994 |
|
RU2081026C1 |
| КОМПЛЕКС С ОСНАСТКОЙ ДЛЯ ПРИСТЫКОВЫВАНИЯ К АЙСБЕРГАМ, ЗАЧАЛИВАНИЯ И ТРАНСПОРТИРОВАНИЯ ИХ К МЕСТУ ПРИЧАЛИВАНИЯ ДЛЯ ПОЛУЧЕНИЯ ВЫСОКОКАЧЕСТВЕННОЙ ПИТЬЕВОЙ ВОДЫ ИЗ НИХ | 1999 |
|
RU2143369C1 |
| РОБОТ МЕХАНИЧЕСКИЙ ПОДВОДНЫЙ | 1996 |
|
RU2135390C1 |
| СУДОПОДЪЕМНИК-СПАСАТЕЛЬ | 2003 |
|
RU2261819C2 |
| СПОСОБ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ ОБЪЕКТОВ | 2009 |
|
RU2417921C2 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 2001 |
|
RU2246421C2 |
| КОМПЛЕКС ДЛЯ СПАСЕНИЯ КОМАНДЫ ЗАТОНУВШЕГО СУДНА, ПОДЪЕМА И БУКСИРОВКИ ПОСЛЕДНЕГО | 2001 |
|
RU2226478C2 |
| СПОСОБ СПАСЕНИЯ ЭКИПАЖА АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ, ЛЕЖАЩЕЙ НА ГРУНТЕ | 2002 |
|
RU2274583C2 |
| АЭРОВИНТОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ СОЛНЕЧНОЙ РАДИАЦИИ В ГАЗ ОЗОН И ИСПОЛЬЗОВАНИЕ ПРЕИМУЩЕСТВЕННО ДЛЯ "ШТОПАНИЯ" ОЗОНОВОЙ ДЫРЫ В ЗАЩИТНОМ СЛОЕ АТМОСФЕРЫ | 1996 |
|
RU2127499C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |


Изобретение относится к спасательным средствам, обеспечивающим подъем затонувших объектов. Подводный спасательный комплекс включает в себя совместно применяемые три подводные лодки, оснащенные средствами передвижения, погружения и всплытия со спасаемым объектом. Корпус каждой подводной лодки выполнен из сваренных между собой торообразных колец, трубчатых в поперечном сечении. На одной из лодок выполнены решетчатые каркасы поддерживающего устройства по всей ее длине. Снизу к ней прикреплены шарообразные пустотелые колеса. Вторая и третья подводные лодки оснащены бортовыми гребными винтами. Между патрубками гребных винтов по всей длине этих подводных лодок закреплены пустотелые ребра-консоли для поворота, подхвата, подъема и транспортирования спасаемого объекта. Спасение и поднятие затонувших объектов заключается в погружении комплекса в подводное положение в месте нахождения спасаемого объекта. Вторая и третья подводные лодки, работая бортовыми гребными винтами, поворачивают и подхватывают ребрами-консолями спасаемый объект. Первая подводная лодка пристраивается снизу ко второй и третьей подводным лодкам, приподнявшим спасаемый объект, стыкуется с ними. Достигается расширение функциональных возможностей подводного спасательного комплекса. 2 с.п. ф-лы, 7 ил.
| Погружное судно для подъема затонувших объектов | 1990 |
|
SU1807958A3 |
| Подводное судоподъемное средство | 1991 |
|
SU1799332A3 |
| US 3541986 A, 24.11.70 | |||
| GB 1417422 A, 10.12.75. | |||
