Изобретение относится к области ракетной техники и может быть использовано для осуществления пуска ракеты-носителя с водной поверхности.
Известен способ транспортировки и пуска ракет с водной поверхности по патенту США N 3245318, 1966 г. , класс НКИ 89-1.7, из описания которого следует, что ракета вместе с пусковым устройством хранится и транспортируется на кораблях, где проводится окончательная сборка, проверка и установка ракеты в ПУ, после чего пусковая установка ферменного типа опускается в воду. Старт ракет с пусковой установки осуществляется дистанционно по проводам или радио. Запуск двигательной установки производится в воде. После запуска ракеты пусковая ферма возвращается на базовый корабль и может быть использована для последующих пусков ракет.
Известен также способ транспортировки и пуска плавучих ракет с водной поверхности, выбранный в качестве прототипа, описанный в патенте США N 3074321, 1963 г. , класс НКИ 89-1.7, согласно которому обладающую запасом плавучести ракету помещают в сухой док корабля и оснащают ее хвостовую часть плавучей рубашкой. Рубашка придает ракете плавучесть в горизонтальном положении. Док заполняется водой, ракета всплывает на поверхность воды и далее ее буксируют судном к месту пуска. Для присоединения ракеты к буксировочному тросу в носовой части прикрепляется балластный груз. Перед пуском ракеты сбрасывают плавучую рубашку, а балластный груз отводят от ракеты и она занимает в воде вертикальное положение для пуска.
Недостатками указанных выше способов эвакуации ракеты с корабля или из дока в море являются:
большие поперечные изгибающие нагрузки на ракету в средней части по длине при плавании на возмущенной поверхности воды в горизонтальном положении, обусловленные наличием больших объемов по концам ракеты с малым весом, которыми являются отсек полезной нагрузки и приборный отсек в головной части ракеты, поддон или плавучая рубашка в хвостовой части, и наличием волнения моря, вследствие которого гребни волн создают перемещающиеся по длине ракеты местные силы Архимеда;
длительное время нахождения ракеты в воде, что может привести к выходу элементов ракеты из допустимого температурного режима и увеличивает вероятность потери герметичности ракетой:
необходимость в специальных средствах эвакуации в виде судна или грузоподъемного устройства.
Заявленное изобретение направлено на решение следующих задач:
уменьшение поперечных изгибающих нагрузок на ракету при плавании в горизонтальном положении и продольных нагрузок, действующих на ракету при остановке ее в горизонтальном положении;
уменьшение времени нахождения ракеты в воде перед пуском;
исключение специальных средств эвакуации ракеты с корабля в воду;
предотвращение возможности соударения ракеты с элементами транспортно-пусковой платформы при взаимных перемещениях после их отделения.
Согласно изобретению указанные задачи решают следующим образом. Ракету в доковой камере размещают и закрепляют на подвижной платформе, имеющей балластную емкость, открывают рампу боковой камеры и совмещают ее поверхность с палубой камеры, ракету на платформе перемещают хвостовой частью на рампу, закрепляют платформу на рампе, после чего поворачивают рампу с платформой и ракетой вниз до положения близкого к вертикальному, разрывают связь платформы с рампой в продольном направлении, под действием собственного веса платформу с ракетой погружают в воду, регулируя скорость погружения изменением плавучести платформы, при завершении погружения платформу стопорят на рампе, разрывают поперечные связи ракеты с платформой, под действием положительной плавучести и набегающего потока воды при движении корабля ракету разворачивают в вертикальной плоскости вокруг элемента продольной связи ее хвостовой части с платформой, при этом после прохождения продольной осью ракеты вертикального положения разрывают связь хвостовой части с платформой, ракета всплывает к поверхности воды и занимает вертикальное стартовое положение, причем ракету на платформе перемещают на рампу доковой камеры хвостовой частью до совмещения продольной координаты центра тяжести ракеты с платформой с осью рампы.
Предлагаемый способ эвакуации представлен схематически на графических материалах, последовательно показаны основные операции способа:
фиг. 1. Исходное положение ракеты на корабле
фиг. 2. Перемещение платформы с ракетой на рампу
фиг. 3. Поворот рампы с платформой в нижнее положение
фиг. 4. Затопление платформы с ракетой в воду
фиг. 5. Разворот ракеты относительно платформы
фиг. 6. Отделение ракеты от платформы и всплытие в стартовое положение.
Способ эвакуации ракеты-носителя осуществляется с помощью корабельного оборудования и стартовой системы. Ракету-носитель 1 размещают на корабле 2 в доковой камере 3, снабженной откидной рампой 4, на транспортно-пусковой платформе 5 хвостовым отсеком к корме. Крепят ракету 1 к платформе 5 в поперечном направлении отводными бандажами 6 в продольном направлении кронштейном 7 с шарниром 8.
Сущность предлагаемого способа заключается в том, что в отличие от прототипа для эвакуации ракеты-носителя боковую камеру 3 корабля 2 не заполняют водой, а открывают рампу 4 до совмещения ее поверхности с поверхностью палубы доковой камеры 3, ракету 1 на платформе 5 перемещают корабельной лебедкой по направляющим хвостовой частью на рампу 4, платформу 5 закрепляют на рампе в продольном и поперечном направлении и поворачивают рампу 4 с платформой 5 до положения близкого к вертикальному, но при этом ось пакеты не доходит до вертикали на 10...30o. После этого разрывают связь, удерживающую платформу на рампе 4 в продольном направлении, и платформа 5 с ракетой 1, скользя по направляющим рампы 4 под действием собственного веса, начинает погружаться в воду. Чтобы платформа 5 с ракетой 1, разогнавшись, не ударилась об упор в нижнем погружаемом положении с недопустимой для прочности ракеты перегрузкой, скорость погружения регулируют силой Архимеда путем изменения плавучести платформы 5, которая имеет балластную емкость с системой продувки и дренажа. Объем емкости подобран таким образом, что сила Архимеда становится равной массе платформы с ракетой до погружения платформы в крайнее нижнее положение. При выравнивании силы Архимеда и веса платформы с ракетой открывают дренажный клапан, воздух из емкости стравливается и платформа продолжает погружение до упора в нижнем положении. Можно проводить стравливание с некоторой задержкой, тогда платформа остановится на время задержки в промежуточном положении, не доходя до нижнего упора. Объем корпуса платформы и площадь продольного сечения дренажного отверстия выбирают из условия остановки в нижнем положении с допустимой для ракеты перегрузкой. Так, например, при массе платформы с ракетой ~ 160 т, площади поперечного сечения емкости, являющейся корпусом платформы и ракеты, ~ 8 м2, площади проходного сечения дренажного отверстия ~ 0,045 м2 и глубине погружения 32 м достигается перегрузка ~ 0,2. В нижнем положении платформы 5 с ракетой 1 раскрывают отводные бандажи 6 платформы 5, удерживая ракету за хвостовую часть в продольном направлении. Ракета 1 под действием силы плавучести принимает вертикальное положение и по инерции проходит на некоторый угол за вертикальное положение. При наличии хода корабля на ракету 1 дополнительно действует гидродинамическая сила от набегающего потока, отклоняющая ракету 1 за вертикальное положение. В этот момент разделяется продольная связь ракеты с платформой, осуществляемая шарниром 8, ракета 1 всплывает в стартовое положение. Глубину погружения ракеты 1 с платформой 5 определяют из условия обеспечения достаточного расстояния между ракетой 1 и конструкцией платформы 5 после всплытия пакеты 1 и совершении относительных перемещений ракеты 1 и платформы 5, вызванных волнением моря и силами, действующими при отделении ракеты 1 от платформы 5.
Предлагаемый способ эвакуации ракеты с корабля в воду по сравнению с прототипом и аналогом позволяет уменьшить поперечные нагрузки на ракету путем исключения плавания ракеты на поверхности воды в горизонтальном положении, что достигается использованием рампы доковой камеры для кантования и погружения ракеты в воду без затопления доковой камеры водой. Это позволяет также отказаться от специальных средств эвакуации в виде гидропарашюта или судна. Исключение затопления доковой камеры водой сокращает время пребывания ракеты в воде.
Прелагаемый способ позволяет обеспечить безударность ракеты с платформой после их разделения. Это достигается за счет глубины погружения. При увеличении глубины погружения ракеты возрастает величина ее всплытия и расстояние между платформой и ракетой. Наличие угла между вертикалью и осью ракеты и действие набегающего потока воды на ракету способствуют увеличению расстояния между платформой и ракетой после всплытия. Данный способ обеспечивает более организованное направление движения ракеты относительно корабля при эвакуации, поскольку жесткая связь ракеты с платформой разъединяется после выведения ее за пределы корабля. Это более надежно обеспечивает несоударение ракеты с конструкциями корабля и платформы.
Предлагаемый способ позволяет использовать без доработки рампу корабля и привод поворота. Это достигают тем, что выдвигают платформу с ракетой на рамку до совмещения продольной координаты центра тяжести платформы с ракетой с осью вращения рампы. В результате при выдвижении платформы с ракетой на рампу дополнительной нагрузкой нагружается ось вращения рампы, а нагрузка на привод поворота рампы практически не меняется, так как сохраняется вращающий момент, действующий на рампу. Рампа доковой камеры используется также в качестве сходни для перемещения грузов с пирса в доковую камеру. Как правило вес этих грузов в несколько раз превышает массу платформы с ракетой, поэтому ось рампы допускает нагружение весом платформы с ракетой.
Таким образом, предлагаемый способ пуска по сравнению с известными способами позволяет уменьшить поперечные нагрузки на ракету, сократить время пребывания ракеты в воде перед пуском, использовать без доработки имеющиеся конструкции на корабле для эвакуации, исключив специальные средства эвакуации, обеспечить более организованное направление движения ракеты относительно корабля при эвакуации и несоударение ракеты с кораблем и платформой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ МОРСКОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ НА ПОДВОДНОМ УЧАСТКЕ ТРАЕКТОРИИ | 2000 |
|
RU2193155C2 |
| МАШИНА ДЛЯ ПРИГОТОВЛЕНИЯ МАКАРОННЫХ ИЗДЕЛИЙ | 1996 |
|
RU2146450C1 |
| СПОСОБ ТРЕХОСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТЕ СПУТНИКА ЗЕМЛИ | 1995 |
|
RU2128607C1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ОТСЕКА БАЛЛИСТИЧЕСКОЙ РАКЕТЫ | 1994 |
|
RU2128816C1 |
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 1994 |
|
RU2086054C1 |
| МНОГОШТУЦЕРНЫЙ РАЗЪЕМНЫЙ АГРЕГАТ | 1997 |
|
RU2135878C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОДНООСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ ОСЕСИММЕТРИЧНОГО КОСМИЧЕСКОГО АППАРАТА НА ОРБИТЕ СПУТНИКА ЗЕМЛИ | 1996 |
|
RU2128608C1 |
| ВОЗВРАЩАЕМЫЙ КОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2000 |
|
RU2190566C2 |
| СПОСОБ СПАСЕНИЯ РАКЕТ-НОСИТЕЛЕЙ МНОГОРАЗОВОГО ПРИМЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2202500C2 |
| КОРАБЕЛЬНЫЙ КОНТЕЙНЕР ДЛЯ ХРАНЕНИЯ И ПУСКА РАКЕТЫ | 2011 |
|
RU2460030C1 |





Изобретение относится к ракетной технике. Для пуска ракеты положительной плавучести с водной поверхности ее размещают в доковой камере корабля и закрепляют на подвижной платформе с балластной емкостью. Открывают рампу доковой камеры и совмещают ее поверхность с палубой камеры. Ракету на платформе перемещают хвостовой частью на рампу. Закрепляют платформу на рампе и поворачивают ее до положения близкого к вертикальному. Разрывают связь платформы с рампой в продольном направлении и под действием собственного веса платформу с ракетой погружают в воду. Скорость погружения регулируют изменением плавучести платформы. При завершении погружения платформу стопорят на рампе. Разрывают поперечные связи ракеты с платформой. Под действием положительной плавучести и набегающего потока воды при движении корабля ракету разворачивают в вертикальной плоскости вокруг элемента продольной связи ее хвостовой части с платформой. После прохождения осью ракеты вертикального положения разрывают связь хвостовой части ракеты с платформой. Ракета всплывает к поверхности воды и занимает стартовое вертикальное положение. 1 з.п.ф-лы, 6 ил.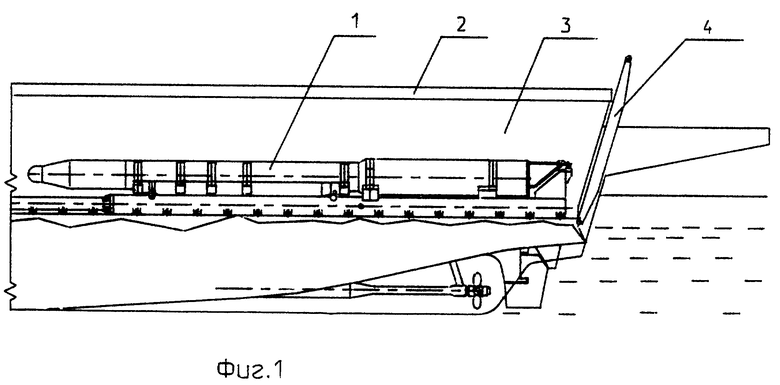
| RU 94029972 A1, 10.09.96 | |||
| US 3074321, 22.01.63 | |||
| US 3513750, 26.05.70 | |||
| US 5170005, 08.12.92 | |||
| СПОСОБ КОНТРОЛЯ СОСТАВА ДВУХФАЗНЫХ КОМПОЗИТОВ | 2004 |
|
RU2280251C1 |

