Изобретение относится к области космической техники и, в частности, к способам угловой ориентации космических объектов и может быть использовано при разработке космического аппарата длительного функционирования на орбите, угловую стабилизацию которого осуществляют с помощью трехосной гравитационной системы ориентации.
Известен способ сохранения угловой стабилизации "малых" коммерческих спутников системы спутниковой персональной связи ("СПС-Спутник"), выводимых с помощью легких ракет-носителей на приполярные орбиты с наклоном 70o и высотой 500 -700 км, где угловая стабилизация сохраняется с помощью гравитационной системы ориентации (см. , например, Величко И. И. Мечи на орала, "Авиация и космонавтика", ISSN 0373-9821 N 5, 1993 г., с.42 - 44).
Недостаток известного способа заключается в том, что в нем обеспечивается одноосная устойчивая ориентация аппарата путем выдвижения на орбите одной гравитационной штанги по направлению продольной оси аппарата, при этом обеспечивается устойчивость только оси аппарата, в то время как положение аппарата относительно продольной оси неустойчиво и он совершает ротационное движение вокруг продольной оси, что, естественно, приводит к снижению его функционально-эксплуатационных возможностей при движении на орбите.
Наиболее близким аналогом заявленного способа является способ трехосной гравитационной ориентации космического аппарата на орбите спутника Земли, в котором изначально поперечная ось спутника устанавливается перпендикулярно к плоскости штанг, выдвигаемых на орбите (после предварительной грубой ориентации по направлению к Земле) X - образно относительно центра аппарата, при этом до выдвижения штанг поперечная ось аппарата ориентируется по нормали к плоскости орбиты (см. В.И.Боевкин, Ю.Г.Гуревич, Ю.Н.Павлов, Г.Н.Толстоусов "Ориентация искусственных спутников в гравитационных и магнитных полях". Главная редакция физико-математической литературы, издательство "Наука", М., 1976, с.19).
X-образная схема и соотношение углов между штангами не позволяет в указанном способе деформировать рабочее соотношение моментов инерции относительно исходного эллипсоида инерции аппарата (при сложенных штангах) до значений, обеспечивающих аппарату оптимальную (по точности ориентации) устойчивость на орбите, т.е. не обеспечиваются допустимые угловые отклонения аппарата на орбите, что естественно, снижает его функционально-эксплуатационные возможности. Кроме того, конструкция ГСО с четырьмя X-образными штангами не оптимальна по массовым характеристикам.
Техническим результатом при использовании предложенного способа является расширение функционально-эксплуатационных возможностей способа трехосной гравитационной ориентации космического аппарата на орбите спутника Земли путем деформации исходного эллипсоида инерции до приведения аппарата в положение оптимальной устойчивости по точности угловой ориентации.
Сущность изобретения состоит в том, что в способе трехосной гравитационной ориентации космического аппарата на орбите спутника Земли, включающем предварительную грубую ориентацию аппарата относительно Земли, после его выведения на орбиту и выдвижения штанг гравитационной системы ориентации (ГСО) в положение, обеспечивающее устойчивость аппарата относительно трех осей, в нем после указанной предварительной ориентации космического аппарата выдвигают штанги ГСО веерообразно в одной плоскости и в одну сторону относительно центра масс аппарата, контролируют амплитуды угловых колебаний аппарата в плоскостях, соответствующих осям ориентации аппарата, и при уменьшении амплитуд указанных угловых колебаний до минимальных значений, допустимых по условиям эксплуатации бортовой аппаратуры, фиксируют штанги ГСО.
При реализации предлагаемого способа трехосной гравитационной ориентации космического аппарата на орбите спутника Земли предлагается следующая последовательность действий:
- в процессе компоновки аппарата устанавливают элементы ГСО веерообразно относительно центра масс аппарата в соответствии с принятой конструктивной схемой (см. фиг.2), при этом габаритно-массовые характеристики штанг ГСО и углы их отклонения от продольной оси аппарата могут быть не одинаковыми, но обеспечивают оптимальную устойчивость аппарата в течение времени его осуществления на орбите;
- после выведения аппарата на орбиту осуществляют гашение угловой скорости, приобретенной аппаратом при отделении от ракеты-носителя;
- обеспечивают начальные условия по углу и угловой скорости и осуществляют однозначную ориентацию аппарата по направлению к Земле;
- совмещают плоскость элементов ГСО с плоскостью орбиты;
- выдвигают штанги ГСО веерообразно в одну сторону относительно центра масс аппарата;
- контролируют амплитуды угловых колебаний аппарата в каналах тангажа, крена и рыскания относительно местной вертикали и при уменьшении амплитуды угловых колебаний до значений, допустимых по условиям работоспособности бортовой аппаратуры, фиксируют штанги ГСО.
По сравнению с ближайшим способом-аналогом предлагаемый способ трехосной гравитационной ориентации расширяет функционально-эксплуатационные возможности ГСО путем обеспечения оптимальной, по точности ориентации, устойчивости аппарата на круговой орбите при минимально-возможной массе конструкции ГСО.
Для пояснения технической сущности предлагаемого изобретения на фиг.1 приведена зависимость соотношения полуосей  эллипсоида инерции (A, B, C - моменты инерции) аппарата 1 от угла отклонения (α) пары штанг 2 ГСО для одного из разрабатываемых в ГРЦ "КБ им. академика В.П.Макеева" малых коммерческих спутников, при этом на фиг.1а показано рабочее положение спутника относительно вектора скорости (V), а на фиг.1б - положение спутника при потере устойчивости относительно рабочего положения (если угол отклонения штанг будет больше
эллипсоида инерции (A, B, C - моменты инерции) аппарата 1 от угла отклонения (α) пары штанг 2 ГСО для одного из разрабатываемых в ГРЦ "КБ им. академика В.П.Макеева" малых коммерческих спутников, при этом на фиг.1а показано рабочее положение спутника относительно вектора скорости (V), а на фиг.1б - положение спутника при потере устойчивости относительно рабочего положения (если угол отклонения штанг будет больше 
На фиг. 2 показаны варианты схем расположения штанг 2 ГСО относительно центра масс 3 и корпуса 1 аппарата в предлагаемом изобретении.
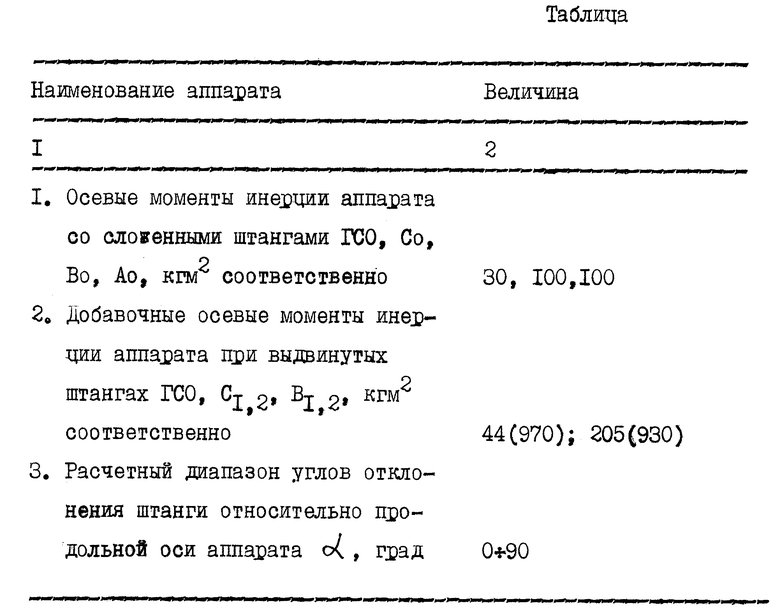
Основные параметры аппарата, необходимые для построения зависимости  от угла отклонения α штанг ГСО, приведены в таблице.
от угла отклонения α штанг ГСО, приведены в таблице.
(Обозначения: 
Примечания:
1. Параметры C1,2 и B1,2 определены аналитически в зависимости от габаритно-массовых характеристик аппарата и ГСО.
2. Из графика на фиг.1 видно, что при углах отклонения штанг от 0 до  т. е. аппарат неустойчив по рысканию, а при углах
т. е. аппарат неустойчив по рысканию, а при углах  аппарат неустойчив по тангажу, т.е. он перевернется, и его приборы прекратят функционирование вследствие потери программной ориентации.
аппарат неустойчив по тангажу, т.е. он перевернется, и его приборы прекратят функционирование вследствие потери программной ориентации.
Исходя из вышеизложенного, по условиям эксплуатации аппарата допустимый диапазон углов наклона штанг к продольной оси аппарата составляет 
3. Путем моделирования в рабочем диапазоне соотношений полуосей эллипсоида инерции аппарата  были найдены оптимальные значения
были найдены оптимальные значения  которые при движении аппарата по круговой орбите высотой 500 км и наклонением 77o обеспечивают минимальные угловые отклонения аппарата по всем трем осям - не более 5o, при этом угол отклонения штанг ГСО составляет α* ≈ 45o т. е. по отношению к прототипу, где рабочий диапазон углов полураствора между штангами составляет 4 - 19o, найденное значение угла отклонения штанг от продольной оси аппарата (α* ≈ 45o) находится далеко за пределами рабочего диапазона углов отклонения штанг прототипа, что является существенным отличием предлагаемого изобретения, т.к. оно обеспечивает формирование эллипсоида инерции аппарата, гарантирующее ему оптимальную по точности ориентации устойчивость на орбите, необходимую для успешной эксплуатации аппарата на орбите.
которые при движении аппарата по круговой орбите высотой 500 км и наклонением 77o обеспечивают минимальные угловые отклонения аппарата по всем трем осям - не более 5o, при этом угол отклонения штанг ГСО составляет α* ≈ 45o т. е. по отношению к прототипу, где рабочий диапазон углов полураствора между штангами составляет 4 - 19o, найденное значение угла отклонения штанг от продольной оси аппарата (α* ≈ 45o) находится далеко за пределами рабочего диапазона углов отклонения штанг прототипа, что является существенным отличием предлагаемого изобретения, т.к. оно обеспечивает формирование эллипсоида инерции аппарата, гарантирующее ему оптимальную по точности ориентации устойчивость на орбите, необходимую для успешной эксплуатации аппарата на орбите.
Предлагаемый способ трехосной гравитационной ориентации космического аппарата на орбите спутника Земли, по сравнению с известными техническими решениями, расширяет функционально-эксплуатационные возможности ГСО путем обеспечения оптимальной, по точности ориентации, устойчивости аппарата на круговой орбите, одновременно минимизируя массу конструкции ГСО. Кроме того, предлагаемое изобретение может обеспечить схему расположения штанг ГСО, при которой штанги, соприкасаясь, гасят за счет трения колебания аппарата в плоскости орбиты, улучшая тем самым условия эксплуатации приборов аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОДНООСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ ОСЕСИММЕТРИЧНОГО КОСМИЧЕСКОГО АППАРАТА НА ОРБИТЕ СПУТНИКА ЗЕМЛИ | 1996 |
|
RU2128608C1 |
| УСТРОЙСТВО ДЛЯ ОДНООСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2000 |
|
RU2167791C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| ВОЗВРАЩАЕМЫЙ КОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2000 |
|
RU2190566C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594056C1 |
| Способ трехосной стабилизации экранированного космического аппарата с центрально-симметричным распределением заряда электростатической защиты и устройство для его реализации | 2024 |
|
RU2841573C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594057C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594054C1 |
| СПОСОБ БАЛЛИСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ МОНИТОРИНГА КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787796C1 |
| МАШИНА ДЛЯ ПРИГОТОВЛЕНИЯ МАКАРОННЫХ ИЗДЕЛИЙ | 1996 |
|
RU2146450C1 |

Изобретение относится к космической технике и может быть использовано для приведения космического аппарата (КА) в оптимальное, по точности ориентации, устойчивое положение на круговой орбите. Предлагаемый способ включает выведение КА на орбиту, его грубую ориентацию, перевод в устойчивое положение равновесия при движении по круговой орбите; при этом штанги гравитационной системы ориентации КА выдвигают веерообразно в одну сторону от центра масс - по окончании грубой ориентации КА на орбите, деформируя исходный эллипсоид инерции аппарата до формы, соответствующей оптимальной, по точности ориентации, устойчивости на орбите, когда соотношение средней и большой полуосей эллипсоида инерции преимущественно находится в диапазоне от 0,6 до 0,9. Изобретение обеспечивает оптимальную устойчивость рабочего положения КА и ведет к снижению массы его гравитационной системы ориентации. 2 ил., 1 табл.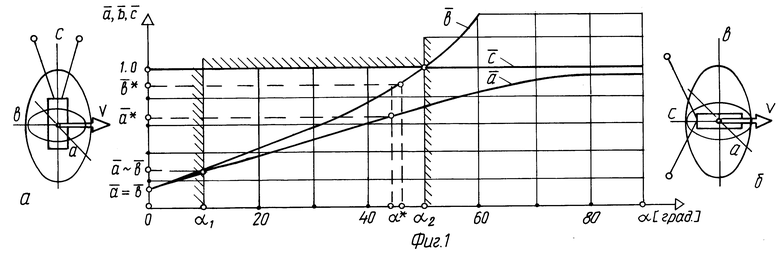
Способ трехосной гравитационной ориентации космического аппарата на орбите спутника Земли, включающий предварительную грубую ориентацию аппарата относительно Земли после его выведения на орбиту и выдвижение штанг гравитационной системы ориентации (ГСО) в положение, обеспечивающее устойчивость аппарата относительно трех осей, отличающийся тем, что после указанной предварительной ориентации космического аппарата выдвигают штанги ГСО веерообразно в одной плоскости и в одну сторону относительно центра масс аппарата, контролируют амплитуды угловых колебаний аппарата в плоскостях, соответствующих осям ориентации аппарата, и при уменьшении амплитуд указанных угловых колебаний до минимальных значений, допустимых по условиям эксплуатации бортовой аппаратуры, фиксируют штанги ГСО.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Боевкин В.и., Гуревич Ю.Г | |||
| и др | |||
| Ориентация искусственных спутников в гравитационных и магнитных полях | |||
| - М.: наука, 1979, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Величко И.И | |||
| Мечи на орала | |||
| - М.: Авиация и космонавтика, N 5, 1993, с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Белецкий В.В | |||
| Движение спутника относительно центра масс в гравитационном поле | |||
| - М.: МГУ, 1975, с | |||
| Солесос | 1922 |
|
SU29A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Итоги науки и техники | |||
| Исследование космического пространства | |||
| Том II | |||
| Вопросы ориентации искусственных спутников | |||
| - М.: ВИНИТИ, 1978, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
