Изобретение относится к области космической техники, в частности к способам и устройствам угловой ориентации космических объектов, и может быть использовано при разработке осесимметричного космического аппарата длительного функционирования на орбите, угловую стабилизацию которого осуществляют с помощью одноосной гравитационной системы ориентации.
Известен геодезический спутник GEOS-3, гравитационная система ориентации которого состоит из единственного выдвигающегося стержня с магнитным демпфером на конце, при этом масса спутника составляет 340 кг, длина гравитационного стержня 6,1 м, масса груза на конце стержня 9 кг, и выводится спутник на орбиту с апогеем 845 км и перигеем 838 км (см., например, Итоги науки и техники. Исследование космического пространства, том 11. Вопросы ориентации искусственных спутников. - М., 1978 г., стр. 188 - 192).
Недостаток известного спутника состоит в том, что для достижения точности ориентации 1o в течение 99% времени полета в нем помимо гравитационной системы ориентации необходимо установить маховик, ось вращения которого в положении равновесия перпендикулярна плоскости орбиты, при этом постоянная составляющая угловой скорости маховика приведет к появлению восстанавливающих моментов по крену и рысканию.
Наиболее близким аналогом заявленного способа и устройства является способ и устройство для одноосной гравитационной ориентации осесимметричного космического аппарат на орбите спутника Земли, в котором "малый" осесимметричный коммерческий спутник системы спутниковой персональной связи ("СПС-спутник") массой 250 - 300 кг, объемом 1,5 м3 выводится на приполярную орбиту с наклонением 70o и высотой 500 - 700 км и приводится в гравитационно-устойчивое (рабочее) положение равновесия на орбите с помощью гравитационного стержня с грузом на конце (см. И.И. Величко "Мечи на орала", "Авиация и космонавтика" ISSN 0373-9821 N 5, 1993 г., стр. 43, вариант "СПС-спутник").
Известно, что космические аппараты осесимметричной формы при движении на круговой орбите подвергаются совместному воздействию гравитационного и аэродинамического момента. Аэродинамический момент на круговых орбитах со сравнительно умеренной, как у известного аппарата высотой (500 - 700 км), оказывает существенное влияние на стационарные вращения осесимметричного аппарата, ухудшая точность гравитационной ориентации аппарата относительно местной вертикали, что, естественно, снижает его функционально-эксплуатационные возможности.
Техническим результатом при использовании предложенного способа и устройства является расширение функционально-эксплуатационных возможностей способа и устройства для одноосной гравитационной ориентации осесимметричного космического аппарата на орбите спутника Земли путем предотвращения появления аэродинамического момента при движении осесимметричного аппарата на круговых орбитах с умеренной высотой.
1. Сущность изобретения состоит в том, что в способе одноосной гравитационной ориентации осесимметричного космического аппарата на орбите спутника Земли, включающем предварительную ориентацию аппарата относительно Земли после выведения его на орбиту и приведение аппарата в гравитационно-устойчивое (рабочее) положение равновесия в плоскости орбиты путем выдвижения гравитационного стержня, в нем до приведения аппарата в указанное рабочее положение размещают центр масс аппарата на заданном расстоянии за центром давления аппарата, соответствующим данному рабочему положению, относительно торцевой базовой плоскости, контролируют в плоскости орбиты амплитуды колебаний аппарата относительно местной вертикали, по разности амплитуд этих колебаний по направлению и против направления полета определяют угловое отклонение гравитационно-устойчивого (рабочего) положения равновесия аппарата от местной вертикали регулируют длину выдвинутого гравитационного стержня до совпадения с заданной точностью указанного положения аппарата с местной вертикалью.
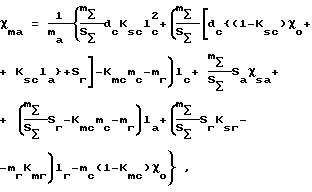
2. В известном устройстве для одноосной гравитационной ориентации осесимметричного космического аппарата на орбите спутника Земли, включающем выдвигаемый гравитационный стержень с грузом на конце, габаритно-массовые и центровочные характеристики которых функционально связаны с габаритно-массовыми и центровочными характеристиками аппарата, в нем конструкция гравитационного стержня имеет габаритно-массовые и центровочные характеристики и местоположение в корпусе аппарата, при которых центр масс неукомплектованного гравитационной системой ориентации аппарата (Χma) размещен относительно торцевой базовой плоскости аппарата на расстоянии, определяемом по следующему соотношению: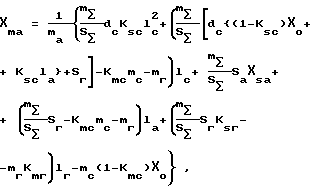
где mΣ = ma+ mг+ mc;
SΣ = Sa+ Sг+ dclc;
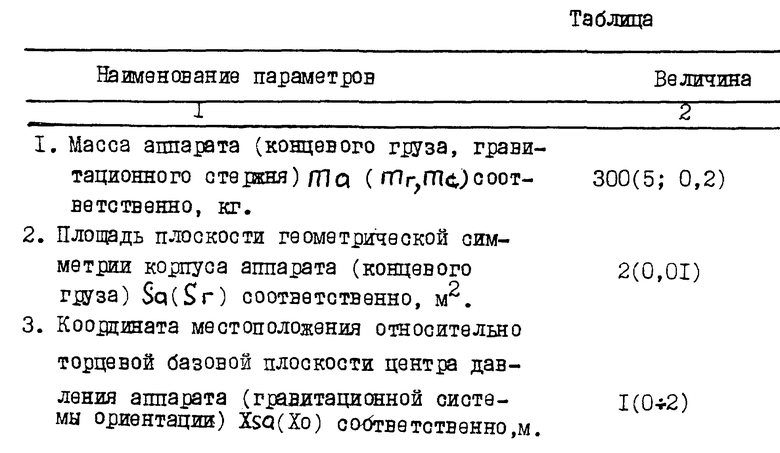
mа (mг, mс) - масса аппарата (концевого груза, гравитационного стержня) соответственно;
Sа (Sг) - площадь плоскости геометрической симметрии корпуса аппарата (концевого груза) соответственно;
Χsa(Χo) - координата местоположения относительно торцевой плоскости центра давления, соответствующего указанному рабочему положению КА, корпуса аппарата (гравитационной системы ориентации) соответственно;
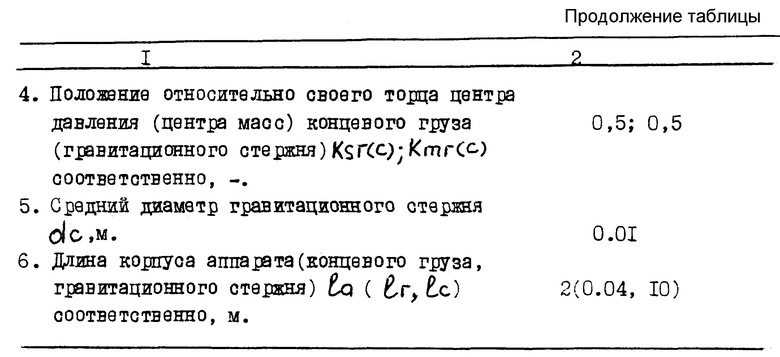
Ksг(с) (Kmг(с) - относительное положение центра давления (центра масс) концевого груза (гравитационного стержня), отсчитывание от торца груза (стержня) и выбираемые из диапазона 0 - 1, соответственно;
dс - средний диаметр гравитационного стержня;
lа (lг, lс) - длина корпуса аппарата (концевого груза, гравитационного стержня) соответственно.
Для реализации предлагаемого способа и устройства для одноосной гравитационной ориентации осесимметричного космического аппарата на орбите спутника Земли предлагается следующая последовательность действий:
- в процессе компоновки аппарата смещают центр масс за центр давления, соответствующий указанному рабочему положению КА, (ΧmΣ > ΧsΣ) относительно торцевой базовой плоскости (см. фиг. 1а);
- после выведения аппарата на орбиту осуществляют гашение угловой скорости, приобретенной аппаратом при отделении от ракеты-носителя;
- обеспечивают начальные условия по углу и угловой скорости и осуществляют однозначную (рабочую) ориентацию аппарата по направлению к Земле;
- выдвигают гравитационный стержень с концевым грузом в рабочее положение;
- приводят аппарат в гравитационно-устойчивое (рабочее) положение равновесия;
- контролируют в плоскости орбиты величину амплитуды угловых колебаний аппарата относительно местной вертикали;
- по разности амплитуд по направлению и против направления полета определяют знак и величину углового отклонения гравитационно-устойчивого (рабочего) положения равновесия аппарата от местной вертикали;
- в зависимости от знака и величины углового отклонения уменьшают или увеличивают рабочую длину гравитационного стержня;
- при совпадении (с заданной точностью) амплитуды угловых колебаний аппарат относительно местной вертикали по направлению и против направления полета фиксируют окончательную рабочую длину гравитационного стержня.
По сравнению с ближайшим способом и устройством - аналогами предлагаемый способ и устройство для одноосной гравитационной ориентации расширяют функционально-эксплуатационные возможности ICO путем обеспечения оптимальной, по точности ориентации, устойчивости аппарата при движении по круговой орбите на высоте, где сопротивление атмосферы может оказать существенное влияние на движение аппарата относительно центра масс.
Для пояснения технической сущности предлагаемого изобретения на фиг. 1 приведена схема одного из разрабатываемых в ГРЦ "КБ им. академика В.П. Макеева" малых коммерческих спутников с осесимметричным корпусом 1 и гравитационной системой ориентации в виде гравитационного стержня 2 с концевым грузом 3, при этом на фиг. 1а показана гравитационная система в исходном, а на фиг. 1б в рабочем положении, и приведено взаиморасположение центра масс (ΧmΣ) и центра давления (ΧsΣ) аппарата, соответствующего указанному рабочему положению аппарата.
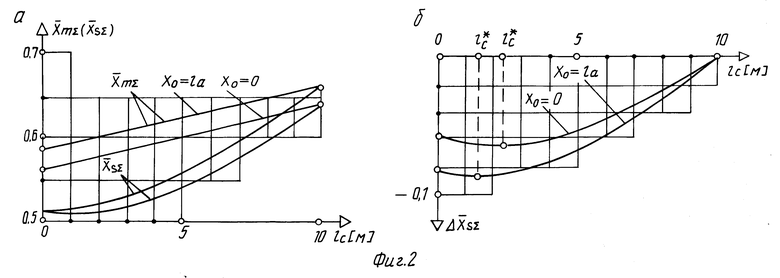
На фиг. 2а показан характер изменения центра масс  и центра давления
и центра давления  аппарата относительно торцевой базовой плоскости при выдвижении гравитационного стержня (lс) в рабочее положение при расположении гравитационной системы ориентации в торце (Χo= 0) и на верхнем срезе (Χo= la) аппарата соответственно, а на фиг. 2б показано относительное расстояние
аппарата относительно торцевой базовой плоскости при выдвижении гравитационного стержня (lс) в рабочее положение при расположении гравитационной системы ориентации в торце (Χo= 0) и на верхнем срезе (Χo= la) аппарата соответственно, а на фиг. 2б показано относительное расстояние  между центром масс и центром давления аппарата
между центром масс и центром давления аппарата  в этих случаях.
в этих случаях.
Основные параметры аппарата и гравитационной системы ориентации, необходимые для построения зависимости изменения центра масс и центра давления, а также изменения расстояния между ними в процессе приведения гравитационной системы в рабочее положение приведены в таблице.
Примечание:
1. Координата местоположения центра масс (Xma) неоснащенного гравитационной системой ориентации аппарата определена из аналитического соотношения Xma формулы изобретения и составляет Xma = 1,14 м;
2. Параметры графиков на фиг.2а,б отнесены к длине корпуса аппарата
ΔΧsΣ= (ΧsΣ-ΧmΣ)/la.
3. Из графика на фиг. 2а видно, что в процессе выдвижения в рабочее положение гравитационного стержня (lс) центр масс  и центр давления
и центр давления  аппарата смещают относительно своего исходного положения
аппарата смещают относительно своего исходного положения  вслед за стержнем, но характер смещения увеличением длины стержня различен:
вслед за стержнем, но характер смещения увеличением длины стержня различен:
- центр масс аппарата  смещается линейно;
смещается линейно;
- центр давления аппарата  смещается параболически.
смещается параболически.
Параболический характер изменения центра давления аппарат  с увеличением длины стержня объясняется тем, что одновременно с увеличением длины стержня увеличивается и площадь плоскости геометрической симметрии стержня (Sс = dсlс).
с увеличением длины стержня объясняется тем, что одновременно с увеличением длины стержня увеличивается и площадь плоскости геометрической симметрии стержня (Sс = dсlс).
4. Вследствие вышесказанного нетревиально изменяется с увеличением длины стержня (lс) и расстояние между центром масс и центром давления  аппарата (запас статической устойчивости аппарата), приведенное на графике фиг. 2б, имея параболический характер
аппарата (запас статической устойчивости аппарата), приведенное на графике фиг. 2б, имея параболический характер 


5. Графики на фиг. 2а, б определены для номинальных параметров аппарата и гравитационной системы ориентации (без учета случайных отклонений).
6. Если у осесимметричного космического аппарата при выдвижении гравитационного стержня в расчетное рабочее положение (lс) из-за случайных отклонений параметров аппарата и гравитационной системы ориентации продольная ось аппарата не совместится с заданной точностью с местной вертикалью, то регулируют рабочую длину стержня (увеличивают или уменьшают) до тех пор, пока расстояние (ΧsΣ-ΧmΣ) = ΔΧsΣ не обеспечит требуемую точность ориентации аппарата относительно местной вертикали.
7. Габаритно-массовые и центровочные характеристики солнечных батарей в раскрытом состоянии являются составной частью параметров не оснащенного гравитационной системой ориентации аппарата и в схемах фиг. 1а, б не приведены.
8. Проведенные исследования показали, что совмещение центра масс с центром давления аппарата (ΧmΣ= ΧsΣ) при выдвижении гравитационного стержня в рабочее положение реализуемо только при выполнении аналитического соотношения для Χma в формуле изобретения.
Предлагаемый способ и устройство для одноосной гравитационной ориентации осесимметричного космического аппарата на орбите спутника Земли, по сравнению с известными техническими решениями, расширяют функционально-эксплуатационные возможности гравитационной системы ориентации путем обеспечения оптимальной по точности ориентации устойчивости аппарата при движении по круговой орбите на высоте, где сопротивление атмосферы может оказать существенное влияние на движение аппарата относительно центра масс.
Предлагаемое изобретение позволяет практически ликвидировать влияние сопротивления атмосферы на движение аппарата относительно центра масс на любых сколь угодно низких круговых орбитах и тем самым обеспечить оптимальную ориентацию аппарата относительно Земли. Одновременно уменьшается загрузка располагаемого гравитационного момента аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРЕХОСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТЕ СПУТНИКА ЗЕМЛИ | 1995 |
|
RU2128607C1 |
| УСТРОЙСТВО ДЛЯ ОДНООСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2000 |
|
RU2167791C1 |
| НИЗКООРБИТАЛЬНЫЙ СПУТНИК ЗЕМЛИ | 2000 |
|
RU2167790C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594054C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594057C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594056C1 |
| НИЗКООРБИТАЛЬНЫЙ СПУТНИК ЗЕМЛИ | 2000 |
|
RU2167792C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СПАСАЕМОГО КОСМИЧЕСКОГО АППАРАТА | 1994 |
|
RU2128610C1 |
| ВОЗВРАЩАЕМЫЙ КОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2000 |
|
RU2190566C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2010 |
|
RU2457159C2 |
Изобретение относится к космической технике и может быть использовано для оптимального по точности приведения космического аппарата (КА) в положение устойчивого равновесия на низкой круговой орбите. В предлагаемом способе на орбите КА совмещают его центр масс с центром давления, ликвидируя влияние аэродинамического момента на относительное движение КА. Предлагаемый КА содержит корпус и выдвигаемый из него гравитационный стержень с грузом на конце, причем габаритно-массовые и центровочные характеристики указанных элементов выбраны из условия расположения центра масс КА (без гравитационной системы ориентации) на определенном расстоянии от торцевой базовой плоскости КА, которое обеспечивает при выдвижении гравитационного стержня, после выведения КА на орбиту и успокоения вблизи рабочего положения равновесия, указанное выше совмещение центров масс и давления аппарата. Изобретение позволяет расширить функционально-эксплуатационные возможности КА и средств его ориентации на орбите. 2 c.п. ф-лы, 2 ил., 1 табл.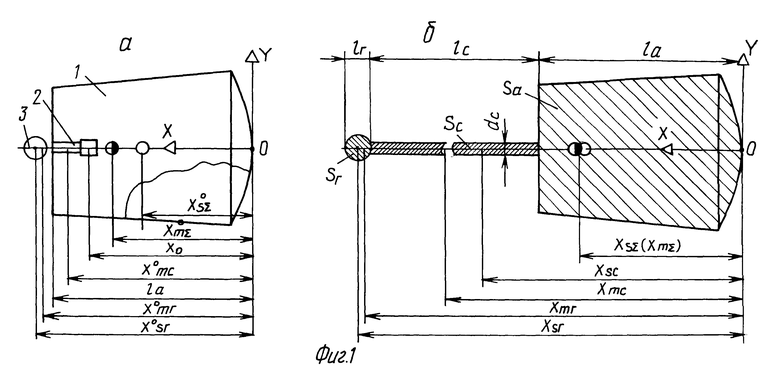
где mΣ = ma+ mг+ mc;
SΣ = Sa+ Sг+ Sc;
ma(mг, mс) - масса аппарата (концевого груза, гравитационного стержня) соответственно;
Sа(Sг) - площадь плоскости геометрической симметрии корпуса аппарата (концевого груза) соответственно;
χsa(χo) - координата местоположения относительно торцевой плоскости центра давления, соответствующего указанному рабочему положению КА, корпуса аппарата (гравитационной системы ориентации) соответственно;
Кsг(с)(Кmг(с)) - относительное положение центра давления (центра масс) концевого груза (гравитационного стержня), отсчитываемое от торца груза (стержня) и выбираемое из диапазона 0 - 1, соответственно;
dс - средний диаметр гравитационного стержня;
lа(lг, lс) - длина корпуса аппарата (концевого груза, гравитационного стержня) соответственно.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Величко И.И | |||
| Мечи на орала | |||
| - Авиация и космонавтика, N 5, 1993, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Итоги науки и техники | |||
| Исследование космического пространства | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Вопросы ориентации искусственных спутников | |||
| - М., 1978, с | |||
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Там же, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, N 888444 A, 30.12.82. | |||
