Изобретение относится к области измерительной техники, а именно к преобразователям линейного ускорения с дискретным выходным сигналом.
Известен акселерометр, содержащий подвижный элемент консольной конструкции, преобразователь инерционной силы в напряжение деформации, преобразователь деформации в электрический сигнал, автогенератор частоты, опорный генератор частоты смеситель [1].
Такому акселерометру присуща погрешность от перекрестных связей, когда при измерении ускорения по измерительной оси появляется сигнал от ускорения по осям, перпендикулярным измерительной оси.
Наиболее близким по технической сущности является акселерометр, содержащий корпус, два чувствительных элемента консольной конструкции с противоположным размещением закрепленных в корпусе концов консолей относительно друг друга, дифференциальный преобразователь инерционной силы в физическую величину, первый и второй автогенераторы, в каждый из которых включена одна из частей дифференциального преобразователя инерционной силы в физическую величину [2].
Недостатком этого акселерометра является ограничение полосы частот выходного сигнала вследствие большого спектра сумм и разностей частот, которые возникают при существующих средствах выделения полезного сигнала из частот двух автогенераторов.
Техническим результатом изобретения является повышение полосы частот выходного сигнала акселерометра и повышение его помехоустойчивости.
Данный технический результат достигается в акселерометре, содержащем корпус, два чувствительных элемента консольной конструкции с противоположным расположением закрепленных в корпусе концов консолей относительно друг друга, дифференциальный преобразователь инерционной силы в физическую величину, первый и второй автогенераторы, в каждый из которых включена одна из частей дифференциального преобразователя инерционной силы в физическую величину, тем, что введены первый делитель частоты на два, второй делитель частоты на два, первый D-триггер, второй D-триггер, третий D-триггер, инвертор, логическое устройство ИСКЛЮЧАЮЩЕЕ ИЛИ, в качестве дифференциального преобразователя инерционной силы в физическую величину выполнен дифференциальный емкостный преобразователь, одна часть дифференциального емкостного преобразователя включена в цепь первого автогенератора, другая часть дифференциального емкостного преобразователя включена в цепь второго автогенератора, первый автогенератор выполнен с частотой выходного сигнала, большей частоты выходного сигнала второго автогенератора, выход первого автогенератора соединен с тактовыми входами первого и второго D-триггеров, а также с входами инвертора и первого делителя частоты на два, выход которого подключен к информационному входу первого D-триггера, выход второго автогенератора подключен к входу второго делителя частоты на два, выход которого подключен к информационному входу второго D-триггера, выходы первого и второго D-триггеров подключены к входам логического устройства ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого подсоединен к информационному входу третьего D-триггера, а к тактовому входу третьего D-триггера подключен выход инвертора.
Путем введения первого и второго делителя частоты на два, первого и второго D-триггеров, логического устройства ИСКЛЮЧАЮЩЕЕ ИЛИ, выполнения в качестве дифференциального преобразователя инерционной силы в физическую величину дифференциального емкостного преобразователя, включения частей дифференциального емкостного преобразователя в цепи автогенераторов, выполнения частоты первого автогенератора большей частоты второго автогенератора, соединения выхода первого автогенератора с тактовыми входами первого и второго D-триггеров, а также с входом первого делителя частоты на два, подключения выхода второго автогенератора к входу второго делителя частоты на два, подсоединения выходов первого и второго делителей частоты на два к информационным входам первого и второго D-триггеров, а их выходов к входам логического устройства ИСКЛЮЧАЮЩЕЕ ИЛИ сразу получается разность частот первого и второго автогенератора без ограничения ее величины, в результате чего повышается полоса частоты выходного сигнала акселерометра.
Посредством введения инвертора и третьего D-триггера, подключения входа инвертора к выходу первого автогенератора, соединения выхода инвертора с тактовым входом третьего D-триггера, подключения выхода логического устройства ИСКЛЮЧАЮЩЕЕ ИЛИ к информационному входу третьего D-триггера достигается исключение из выходного сигнала акселерометра неинформационных импульсов, возникающих вследствие разного времени распространения импульсов в первом и втором D-триггерах. Поэтому повышается помехоустойчивость акселерометра.
На фиг. 1 представлен общий вид акселерометра; на фиг. 2 - структурная схема акселерометра; на фиг. 3 - диаграммы сигналов акселерометра.
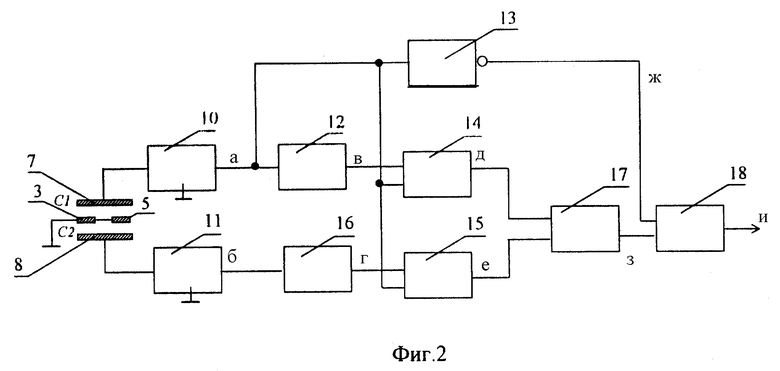
Акселерометр (фиг. 1) содержит корпус, состоящий из первой части 1 и второй части 2. Между ними защемлены первый чувствительный элемент 3 в виде консоли с упругой перемычкой 4, соединяющей его с защемленной частью, а также второй чувствительный элемент 5 консольной конструкции с упругой перемычкой 6, соединяющей его с защемленной частью. Чувствительные элементы 3, 5 выполнены из электропроводного материала, и защемленные части их консолей расположены противоположно друг относительно друга.
На первой части 1 корпуса выполнен неподвижный электрод 7 дифференциального емкостного преобразователя. На второй части 2 корпуса выполнен неподвижный электрод 8 дифференциального емкостного преобразователя. Подвижный электрод дифференциального емкостного преобразователя образован чувствительными элементами 3, 5 из электропроводного материала.
Измерительная ось акселерометра направлена по оси симметрии 9 - 9.
В дифференциальном емкостном преобразователе (фиг. 2) выполнен конденсатор C1, образованный неподвижным электродом 7 и подвижным электродом из соединенных вместе чувствительных элементов 3, 5. Конденсатор C2 дифференциального емкостного преобразователя образован неподвижным электродом 8 и тем же самым подвижным электродом, что и у конденсатора C1.
Первый автогенератор 10 и второй автогенератор 11 выполнен в виде релаксационных RC-генератором. Конденсатор C1 включен в цепь первого автогенератора 10 в качестве времязадающего конденсатора. Конденсатор C2 включен в цепь второго автогенератора 11 в качестве времязадающего конденсатора.
Первый автогенератор 10 выполнен с частотой выходного сигнала, большей частоты выходного сигнала второго автогенератора 11.
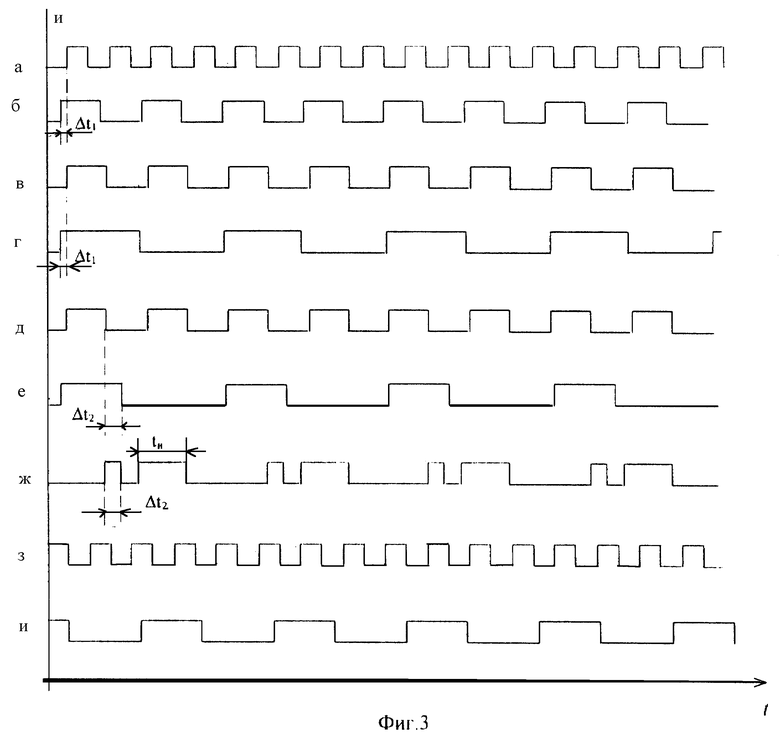
Выход первого автогенератора 10 соединен линией "a" с входами первого делителя частоты на два 12 и инвертора 13, тактовыми входами первого D-триггера 14 и второго D-триггера 15. Выход второго автогенератора 11 соединен линией "б" с входом второго делителя частоты на два 16. Выход первого делителя частоты на два 12 соединен линией "в" с информационным входом первого D-триггера 14, выход второго делителя частоты на два 16 соединен линией "г" с информационным входом второго D-триггера 15. Выход первого D-триггера 14 линией "д" и выход второго D-триггера 15 линией "е" соединены с входами логического устройства "ИСКЛЮЧАЮЩЕЕ ИЛИ" 17, выход которого подключен к информационному входу третьего D-триггера 18 линией "ж". Выход инвертора 13 соединен с тактовым входом по линии "з" третьего D-триггера 18. Выходной сигнал акселерометра поступает с выхода третьего D-триггера 18 по линии "и".
Акселерометр работает следующим образом. При наличии ускорения по измерительной оси 9 - 9 под действием инерционной силы происходит перемещение чувствительных элементов 3, 5 (фиг. 1).
При этом изменяются емкости конденсаторов C1, C2 (фиг. 2), и на выходе по линии "а" первого автогенератора 10 появляется сигнал с частотой f1 (фиг. 3)
f1 = f01+Δf1, (1)
где f01 - основная частота первого автогенератора 10; Δf1 - изменение частоты сигнала первого автогенератора 10 при наличии ускорения.
На выходе по линии "б" второго автогенератора 11 идет сигнал с частотой f2
f2 = f02-Δf2, (2)
где f02 - основная частота второго автогенератора 11; Δf2 - изменение частоты сигнала второго автогенератора 11 при наличии ускорения.
При этом f01 > f02. Для примера принято, что f01 = 2f02.
Вследствие несовпадения фаз сигналов первого автогенератора 10 и второго автогенератора 11 есть разность времени Δt1 между передними фронтами импульсов сигналов на линиях "а" и "б".
После прохождения сигнала первого автогенератора 10 через первый делитель частоты на два 12 на его выходе по линии "б" появляется сигнал с частотой f'1 (3)
(3)
После прохождения сигнала второго автогенератора 11 через второй делитель частоты на два 16 на его выходе по линии "г" появляется сигнал с частотой f'2 (4)
(4)
При этом сохраняется разность времени Δt1 между передними фронтами импульсов по линиям "в" и "г". После тактирования сигналами по линии "а" сигналов первого делителя частоты на два 12 и второго делителя частоты на два 16 в первом и втором D-триггерах 14, 15 на их выходах по линиям "д", "е" ликвидируется разность времени Δt1 между передними фронтами импульсов. При этом может возникать разность времени Δt2 между задними фронтами импульсов вследствие разного времени распространения импульсов в первом и втором D-триггерах 14, 15.
На выходе логического устройства ИСКЛЮЧАЮЩЕЕ ИЛИ 17 на линии "ж" получается сигнал, состоящий из импульсов длительностью tи и импульсов длительностью Δt2. Импульсы длительностью tи представляют собой сигнал с разностью частот fр
fр = f'1 - f'2 (5)
Импульсы с длительностью Δt2 возникают в случае разных времен распространения импульсов в первом и втором D-триггерах 14, 15 и являются неинформационным сигналом.
В инверторе 13 входной сигнал по линии "а" преобразуется в противофазный выходной сигнал по линии "з".
В результате тактирования сигналом по линии "з" входных сигналов по линии "ж" в третьем D-триггере 18 на выходе по линии "и" получается выходной сигнал с частотой fр, сигналы с длительностью импульсов Δt2 исключаются.
В соответствии с выражениями (1) - (4) выражение (5) принимает вид
Первый член этого выражения представляет собой уставку, учитываемую при измерении сигнала акселерометра. Второй член выражения (6) представляет собой выходной сигнал акселерометра, пропорциональный измеряемому ускорению.
Источники информации
1. Патент США N 3033043, НКИ 73/517, 1962. Цифровой акселерометр.
2. Патент США N 2984111, НКИ 73/517, 1961. Акселерометр.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 1999 |
|
RU2148829C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЧАСТОТУ | 1989 |
|
RU2009613C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2240651C1 |
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2148831C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2118831C1 |
Aкселерометр предназначен для использования в области измерительной техники как преобразователь линейного ускорения с дискретным выходным сигналом. Два чувствительных элемента консольной конструкции закреплены в корпусе. В качестве дифференциального преобразователя инерционной силы в физическую величину используется дифференциальный емкостный преобразователь, включенный в цепи автогенераторов. Один автогенератор выполнен с частотой выходного сигнала, большей частоты другого автогенератора. Два делителя частоты соединены с выходами автогенераторов. Выходы делителей частоты подключены к информационным входам первого и второго D-триггера, выходы которых соединены с логическим устройством ИСКЛЮЧАЮЩЕЕ ИЛИ, что обеспечивает повышение полосы частот выходного сигнала акселерометра. Введение третьего D-триггера, соединение с его тактовым входом выхода инвертора, а с информационным входом - выхода устройства ИСКЛЮЧАЮЩЕЕ ИЛИ приводит к повышению помехоустойчивости. 3 ил.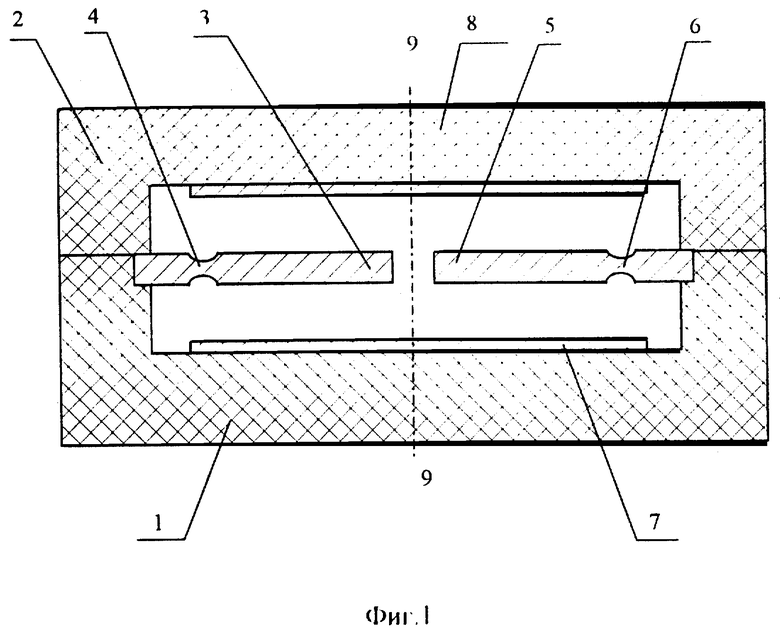
Акселерометр, содержащий корпус, два чувствительных элемента консольной конструкции с противоположным расположением закрепленных в корпусе концов консолей относительно друг друга, дифференциальный преобразователь инерционной силы в физическую величину, первый и второй автогенераторы, в каждый из которых включена одна из частей дифференциального преобразователя инерционной силы в физическую величину, отличающийся тем, что введены первый делитель частоты на два, второй делитель частоты на два, первый D-триггер, второй D-триггер, третий D-триггер, инвертор, логическое устройство ИСКЛЮЧАЮЩЕЕ ИЛИ, в качестве дифференциального преобразователя инерционной силы в физическую величину выполнен дифференциальный емкостный преобразователь, одна часть дифференциального емкостного преобразователя включена в цепь первого автогенератора, другая часть дифференциального емкостного преобразователя включена в цепь второго автогенератора, первый автогенератор выполнен с частотой выходного сигнала, большей частоты выходного сигнала второго автогенератора, выход первого автогенератора соединен с тактовыми входами первого и второго D-триггеров, а также с входами инвертора и первого делителя частоты на два, выход которого подключен к информационному входу первого D-триггера, выход второго автогенератора подключен к входу второго делителя частоты на два, выход которого подключен к информационному входу второго D-триггера, выходы первого и второго D-триггеров подключены к входам логического устройства ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого подсоединен к информационному входу третьего D-триггера, а к тактовому входу третьего D-триггера подключен выход инвертора.
| Способ получения низкозастывающих нефтяных фракций | 2002 |
|
RU2225433C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
| АКСЕЛЕРОМЕТР | 1994 |
|
RU2083989C1 |
| US 5616844 A, 01.04.97 | |||
| КАТОК-ГРЕБНЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2558263C1 |
