Изобретения относятся к области измерителей быстрых (сверхширокополосных) электрических сигналов, например радиолокационных, и могут быть использованы для их ввода в "медленные" устройства обработки, такие как осциллографы, ЭВМ и т.п.
Известен стробоскопический преобразователь [1] , содержащий источники сигналов и синхросигналов, генераторы медленного и быстрого пилообразных напряжений, компаратор и смеситель.
Недостатком устройства [1] является низкая точность преобразований, связанная с тем, что для достижения высококачественной линейности источников пилообразного напряжения и компаратора используются достаточно сложные [2] аналоговые схемы. Работа этих схем в высокочастотной области сопровождается возникновением шумов и нестабильностей, что приводит к искажению как формы сигнала, так и нарушению временного согласования развертки осциллографа с работой схемы стробоскопического преобразователя. Последнюю проблему было призвано решить введение обратной связи через экран осциллографа в устройство [1] . Такое решение не удовлетворяет высоким требованиям к качеству измерения сверхвысокочастотных сигналов.
В качестве прототипа выбран стробоскопический преобразователь [2], стр. 9, содержащий (фиг. 1) источник синхросигнала Uсс-1, источник сигнала Uс-2, смеситель - 3, генераторы медленного - 4 и быстрого - 5 пилообразных напряжений, а также компаратор - 6, выход смесителя 3-Uо является выходом устройства, сигнальный вход соединен с выходом Uс источника сигнала - 2, а стробирующий вход с выходом компаратора - 6, выходы генераторов медленного - 4 и быстрого - 5 пилообразных напряжений соединены со входами компаратора - 6, выход источника синхросигналов 1-Uсс соединен с запускающими входами источников сигнала - 2 и генератора быстрой пилы - 5. Отметим, что источники сигналов - 2 и синхросигналов - 1 в [2] стр. 9 не показаны, однако их наличие и способ взаимодействия очевидны из описания действия схемы.
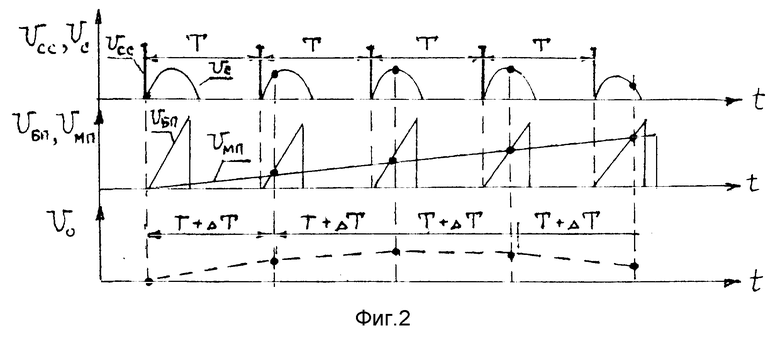
Принцип стробоскопического преобразования состоит в том, что поскольку при необходимости обработки быстрых (сверхширокополосных) сигналов возможности современной электронной техники не позволяют сделать это в реальном масштабе времени, то для решения этой проблемы прибегают к многократной реализации с периодом T быстродействующего сигнала Uс от источника - 2 по синхронизирующим сигналам Uсс от источника - 1. Из каждой реализации используют лишь один отсчет исследуемого сигнала Uс. Если эти отсчеты линейно сдвинуты по времени относительно начала сигнала Uс на постоянный интервал ΔT , то огибающая полученных отсчетов Uо повторяет исходный сигнал с точностью до масштабно-временного преобразования.
В соответствии с этой идеей (фиг. 2) источник синхросигналов Uсс-1 с периодом T запускает источник сигнала Uс-2 и генератор быстрой пилы - 5. Запуск генератора медленной пилы - 4 может, например, также осуществляться по сигналу Uсс от генератора быстрой пилы, а период медленной пилы выбирается, исходя из длительности процесса Uс путем ручных регулировок развертки осциллографа, т. е. генератора - 4. Совпадение уровней быстрой UБП и медленной UМП пил приводит к появлению на выходе компаратора - 6 коротких импульсов Uстроб отстоящих друг от друга на T+ΔT, которые пропускают отсчеты Uо измеряемого сигнала Uс через смеситель на выход схемы 7. В результате огибающая отсчетов Uо представляет собой масштабно-временное преобразование сигнала Uс.
Недостатком устройства [2] является низкая точность масштабно-временного преобразования. В работе [2] , глава 4, показано, что основным источником нестабильности преобразования является генератор "быстрой" пилы, поскольку искажения "медленной" пилы, хотя и приводят к ошибкам измерений, но компенсируются соответствующим изменением скорости развертки осциллографа. Для достижения высокого качества масштабно-временного преобразования требуются высокая точность, стабильность и линейность генераторов пилообразных напряжений 4 и 5, компаратора 6 и других элементов схемы.
Современные устройства обработки, как правило, используют ЭВМ для обработки отсчетов, поэтому для получения высокого качества масштабно-временного преобразования схема [2] оказывается малопригодной. Заметим, что сам принцип формирования стробирующих импульсов Uстроб на основе генераторов пилообразных напряжений основывался на наличии в осциллографе генератора медленной пилы для развертки экрана.
Цель изобретений состоит в достижении высокой точности масштабно-временного преобразования, решаемого стробоскопическим преобразователем так, чтобы точные методы исследования, например, с использованием ЭВМ, не требовали реализации сложных алгоритмов обработки, в частности, фильтрации и т. п. Противоречие в традиционных [1, 2] методах достижения этой цели заключается в том, что повышение качества линейности развертки быстрого и медленного пилообразных напряжений, точности и быстродействия компаратора требует усложнения соответствующих схем с целью параметрической или схемотехнической стабилизации их работы. Вместе с тем любое усложнение схемы в сверхвысокочастотной области сопровождается возникновением новых источников шумов и нестабильностей, на ликвидацию которых частично направлено, например, устройство [1]. Таким образом, идея, заложенная в предлагаемой группе изобретений состоит в максимальном упрощении высокочастотной части устройства и обеспечении возможности компенсации возникающих искажений за счет управления процессами в низкочастотной области. Такое управление может состоять либо в предварительной настройке схемы за счет пропуска и контроля прохождения известных сигналов, либо в периодическом оценивании и адаптации процесса стробоскопического преобразования ЭВМ.
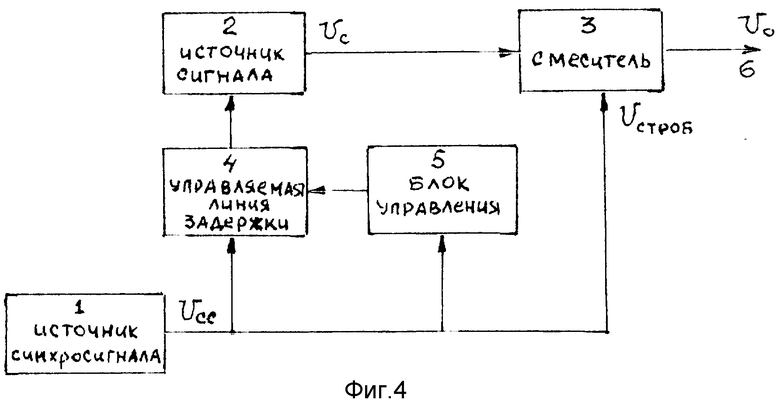
Для достижения поставленной цели предлагается использовать управляемую линию задержки сигнала - 4, включаемую либо фиг. 3 между генератором синхросигнала и смесителем или фиг. 4 между генератором синхросигнала и источником сигнала, а также блок управления линией задержки. Переменная величина задержки позволяет задержать либо стробимпульс на выходе смесителя на T+ΔT, либо задержать реализацию процесса от источника сигналов на T+ΔT что в принципе эквивалентно. Низкочастотное управление задержки от блока управления - 5 позволяет добиться ее высокой точности и скомпенсировать возможные искажения.
Таким образом, основным техническим результатом реализации предлагаемой группы изобретений является достижение высокой точности масштабно-временного преобразования сверхвысокочастотного сигнала за счет использования простой, малошумящей в области высоких частот линии задержки - 4, обеспеченной возможностью точной (адаптивной) настройки блоком управления - 5 в области низких частот с учетом искажений, вносимых в схему высокочастотными составляющими.
Существенным отличием предлагаемой группы изобретений является использование управляемой линии задержки, которая обеспечивает запаздывание либо синхронизирующего импульса Uсс относительно измеряемого Uс либо измеряемого относительно синхронизирующего Uсс, причем предлагаемый вариант реализации этой задержки в высокочастотной области отличает высокие простота и стабильность, а низкочастотное управление позволяет учесть искажения схемы.
Конкретная реализация схемы управляемой линии задержки синхросигналов, в частности, рассмотренная ниже ее часть, построенная на основе диода с накоплением заряда, отработана авторами в ходе экспериментальных исследований.
Предлагаемая группа изобретений может быть использована в исследовательских и измерительных комплексах, ставящих своей целью, например, получение высококачественных откликов от объектов, при облучении их сверхширокополосными зондирующими радиолокационными сигналами для построения изображений на базе ЭВМ.
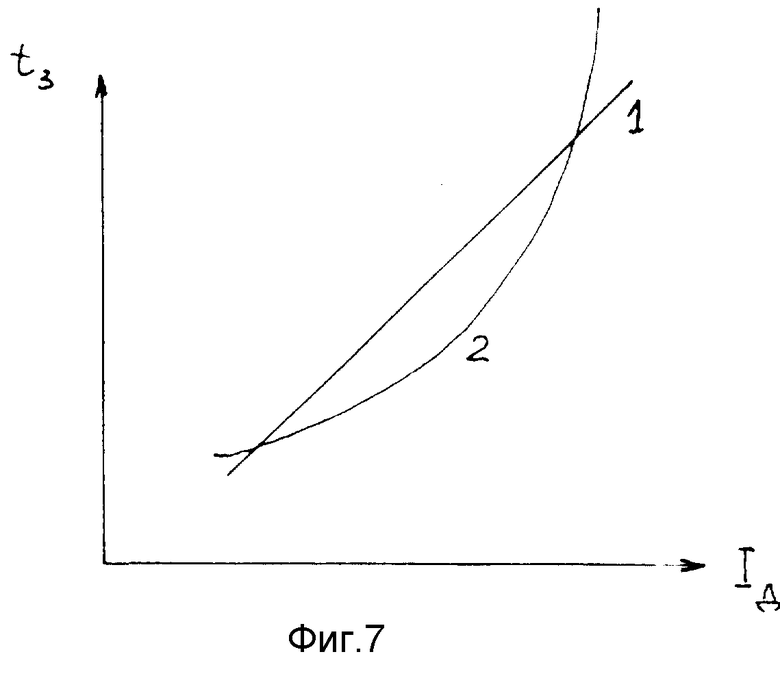
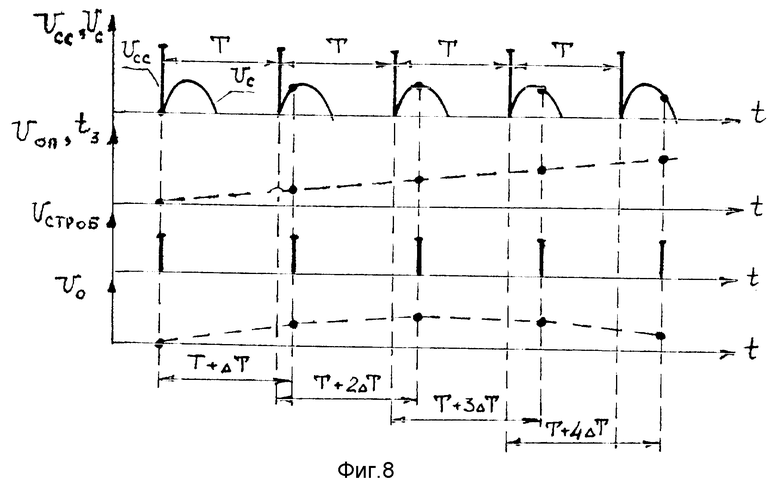
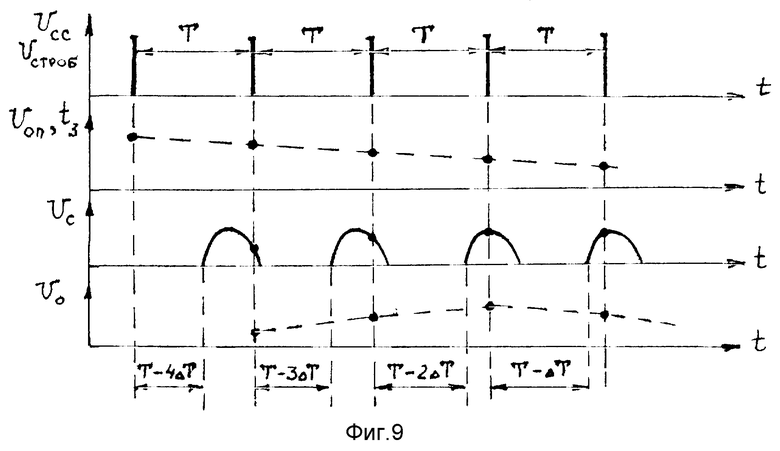
На фиг. 1 изображена структурная схема прототипа изобретения, а на фиг. 2 - принцип его действия. Структурные схемы, предлагаемой группы изобретений приведены на фиг. 3 и 4 соответственно. На фиг. 5 приведены схемы управляемой линии задержки сигналов и блока управления, а фиг. 6 иллюстрирует временные диаграммы работы управляемой линии задержки. На фиг. 7 изображены зависимости времени задержки управляемой линии задержки от тока диода. Временная диаграмма, иллюстрирующая принцип действия первой фиг. 3 схемы из группы изобретений приведена на фиг. 8, а второй - на фиг. 9.
Основными блоками, обеспечивающими реализацию предлагаемой группы изобретений, являются управляемая линия задержки и блок управления. Рассмотрим возможный способ их практической реализации.
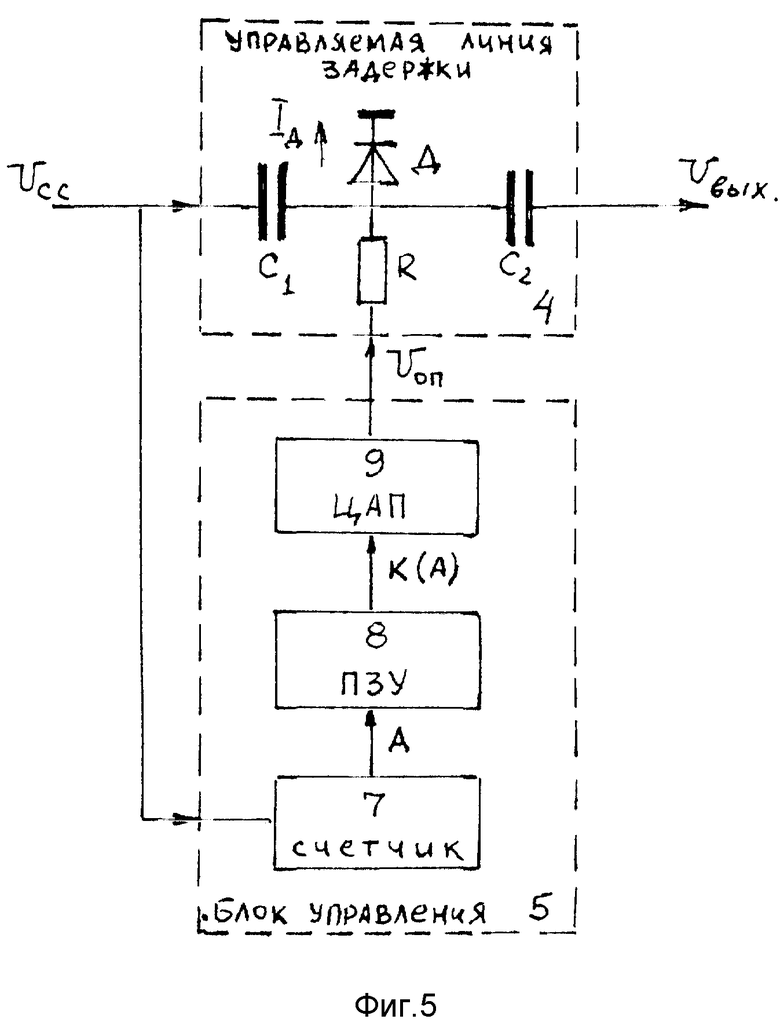
В качестве управляемой задержки сигнала может использоваться схема фиг. 5, содержащая [2] стр. 60. C1, C2 - конденсаторы большой емкости, не оказывающие влияния на работу схемы, но развязывающие ее по постоянному току, R - резистор, задающий ток в цепи источника опорного напряжения Uоп, D - диод с накоплением заряда.
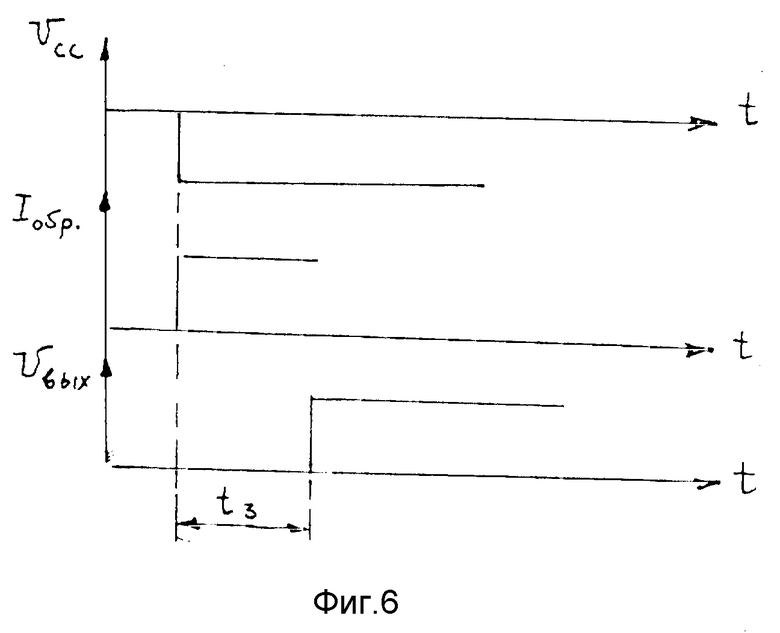
В работе [2] данная схема используется для формирования "коротких" выходных импульсов Uвых входных Uвх. Вместе с тем, там же отмечается, что задержка, вносимая этой схемой, зависит от тока, задаваемого источником Uоп и резистором R. Действительно, в исходном положении диод Д открыт и через него протекает ток IД≈Uоп/R. Этот ток создает заряд неосновных носителей заряда в базе, пропорциональной току IД. Прямоугольный импульс отрицательной полярности Uвх фиг. 6 приводит к появлению постоянного обратного тока Iобр, который рассасывает заряды и через время tз запирает диод, на выходе которого формируется сигнал Uвых с хорошим фронтом. Время запирания диода tз зависит от тока IД и параметров диода. Экспериментальные исследования, проведенные авторами, показали, что эта зависимость носит характер близкий к линейному фиг. 7, линия 1. Таким образом, изменяя ток IД за счет Uоп или R можно влиять на величину задержки tз, причем при нелинейной зависимости tз(I) - кривая 2, фиг. 7 ее можно легко скомпенсировать за счет обратно пропорционального изменения тока IД. управляя соответствующим образом R или Vоп.
Блок управления 5 фиг. 5 может включать счетчик - 7, запоминающее устройство, например. ПЗУ-8 и цифроаналоговый преобразователь - 9. Содержимое счетчика - 7, в качестве адреса А подается на адресный вход запоминающего устройства, из которого извлекается код К(А), формирующий на выходе цифроаналогового преобразователя 9 опорное напряжение Vоп, пропорциональное коду К(А). Изменение содержимого счетчика 7 по сигналам Uсс приводит к изменению адреса А, кода К(А), величины опорного напряжения Uоп и соответственно величины tз - задержки в управляемой линии задержки 4. Коды К(А), записанные в запоминающее устройство, должны быть таковы, чтобы обеспечивать желаемое изменение задержки, например, линейное нарастание tз = hΔT, где n - номер синхроимпульса Uсс с учетом нелинейности управляемой линии задержки 4 и других элементов.
В качестве источника синхросигналов 1 может использоваться автоколебательный мультивибратор. К его характеристикам не предъявляется высоких требований: длительность импульса - единицы - десятки наносекунд, а частота - десятки - сотни килогерц при низких требованиях к стабильности, поэтому для его построения могут использоваться типовые схемы, например, мультивибратор на логических элементах.
Источником сигналов 2 может быть любая схема генератора импульсов с внешним запуском, например, ждущий мультивибратор.
В качестве смесителя 3 могут использоваться типовые схемы например, предлагаемые в [2], глава 2.
Рассмотрим принцип действия предложенных схем стробоскопических преобразователей 3 и 4. В исходном положении в ПЗУ-8 блока управления-5 заложены коды, соответствующие желаемому характеру изменения Uоп, а следовательно величины задержки tз управляемой линии задержки 4. Счетчик 7 обнулен, так что Uоп задает tз, соответствующее величине задержки для первого измерения.
Процессы в стробоскопическом преобразователе фиг. 3 иллюстрирует временная диаграмма фиг. 8. Источник синхросигнала - 1 с периодом T вырабатывает сигнал Uсс, который запускает процесс в источнике сигнала - 2, на выходе которого появляется сигнал Uс, поступающий на сигнальный вход смесителя 3. Управляемая линия задержки 4 формирует из Uсс с некоторой задержкой tз стробирующие импульсы Uстроб, которые открывают смеситель 3 и пропускают на выход стробоскопического преобразователя отсчеты измеряемого сигнала Uо. Каждый сигнал Uсс изменяет задающее воздействие от блока управления 5, а следовательно, величину задержки Uстроб относительно Uсс. Если tз изменяется линейно, то выходные отсчеты Uо будут сдвинуты друг относительно друга на T+ΔT, а следовательно огибающая Uо будет представлять собой масштабно-временное преобразование сигнала Uс.
В стробоскопическом преобразователе 4 происходят процессы, изображенные на фиг. 4. Здесь в качестве стробирующих и Uстроб используются синхронизирующие сигналы Uсс, а блок управления 5 и управляемая линия задержки 4 обеспечивают запаздывание начала реализации процесса в источнике сигнала 2 относительно Uсс, в результате чего стробирующие импульсы Uстроб "вырезают" из Uс отсчеты, также отстоящие друг относительно друга на T+ΔT.
Особенностями временной диаграммы фиг. 9 является то, что во-первых, Uстроб "вырезает" отсчеты из предыдущей реализации процесса Uс, во-вторых, величина задержки tз изменяется обратно пропорционально со временем и, в-третьих, выходные сигналы Uо представляют собой масштабно-временное преобразование сигнала Uс в обратном времени.
Таким образом, стробоскопические преобразователи фиг. 3, 4 обеспечивают получение измерений сигнала Uс с точностью до масштабно-временного преобразования. При этом управляемая линия задержки 4 и блок управления ею 5 позволяют добиться высокого качества и точности преобразования за счет простой малошумящей схемы и возможности скомпенсировать искажения. Эти схемы позволяют также гибко управлять процессом измерения сигналов, например, уменьшая изменения величины задержки Δtз = tзi-tзi+1 от одного измерения до другого, можно повысить степень детализации отдельных участков Uс, или, наоборот, пропустить некоторые части Uс, увеличивая Δtз.
Особый интерес представляет использование такого стробоскопического преобразователя в измерительных комплексах, включающих ЭВМ на которую может быть возложена функция блока управления 5. В этом случае, получая на вход измерения Uо, ЭВМ может оперативно управлять процессом измерения, воздействуя на управляемую линию задержки 4.
Литература.
1. А.С.СССР SV 1714524A1. Стробоскопический осциллограф со стабилизацией изображения. Миляев П. В. и др. G 01 R 13/00 Приоритет 15.01.90, Зарег. 22.01.91 г.
2. Рябинин Ю.А. Стробоскопическое осциллографирование М. "Сов. радио" - 1972 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ СТРОБОСКОПИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 1999 |
|
RU2159446C1 |
| СПОСОБ АНТЕННЫХ ИЗМЕРЕНИЙ | 1998 |
|
RU2141674C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| ДОПЛЕРОВСКОЕ УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 1997 |
|
RU2110811C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ФАЗОВОГО ЦЕНТРА АНТЕННЫ | 2006 |
|
RU2326393C2 |
| СЧЕТЧИК ЭЛЕКТРОЭНЕРГИИ | 1994 |
|
RU2101713C1 |
| ЦИФРОВОЙ СТРОБОСКОПИЧЕСКИЙ ОСЦИЛЛОГРАФ | 1992 |
|
RU2010239C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 1990 |
|
RU2050575C1 |
| Стробоскопический преобразователь однократных электрических сигналов | 1980 |
|
SU894576A1 |

Группа изобретений относится к области измерителей импульсов нано-и пикосекундной длительности и может быть использована для ввода "быстрых сигналов" в "медленные" устройства обработки. Сущность предлагаемой группы изобретений состоит во введении в состав преобразователя управляемой линии задержки на основе диода с накоплением заряда и блока управления задержкой синхронизируемых источником синхросигналов. Простая, малошумящая в области высоких частот схема управляемой задержки и низкочастотное управление ею от блока управления с учетом искажений и нелинейностей всех элементов преобразователя позволяют добиться высокого качества масштабно-временного преобразования. Управляемая задержка стробирующего сигнала смесителя относительно изменяемого сигнала или измеряемого сигнала относительно стробирующего образуют варианты реализации предложенной группы изобретений. Технический результат: наибольший эффект от использования изобретений может быть достигнут в измерительных комплексах, содержащих ЭВМ, когда адаптивное управление задержкой от ЭВМ позволяет получить желаемое качество и свойства масштабно-временного преобразования. 2 с. и 2 з.п. ф-лы, 9 ил.
| Рябинин Ю.А | |||
| Стробоскопическое осциллографирование | |||
| - М.: Сов.радио, 1972, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Осциллограф | 1990 |
|
SU1739304A1 |
| ОСЦИЛЛОГРАФ | 1991 |
|
RU2043637C1 |
| Устройство для очистки движущейся металлической полосы | 1982 |
|
SU1087210A1 |
| US 3473123 A, 14.10.69 | |||
| Кукуш В.Д | |||
| Электрорадиоизмерения | |||
| - М.: Радио и связь, 1985, с | |||
| Ручная тележка для грузов, превращаемая в сани | 1920 |
|
SU238A1 |
| Грязнов М.И | |||
| и др | |||
| Измерение параметров импульсов | |||
| - М.: Радио и связь, 1991, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
