Изобретение относится к исследованиям и освоению космического пространства и может быть использовано в космических объектах различного назначения.
Известен способ увеличения сроков активного существования (САС) космических аппаратов, заключающийся в том, что образуют перед звездолетом облако из механических частиц, кинетически воздействуют облаком на встречное по курсу звездолета космическое тело и избегают с ним столкновения вследствие его разрушения и испарения частицами облака [1].
Способ упускает шанс (1-Pв) не встречного столкновения звездолета и тела, где Pв - вероятность их лобового удара. Астероиды, кометы и крупные метеорные частицы при полете к звезде Барнарда могут предвосхитить исход проекта "Дедал". Полагая, что САС есть время от начала полета до рокового события включительно, обратим внимание на отношение полетного Тп и пролетного Тпр времен звездолета, явно большее 1 для этой экспедиции будущего при скорости 0,1 от скорости света согласно проекту. Следовательно, роковое событие действительно возможно на интервале полетного времени, т.к. (1-Pв)Тп> PвТпр, даже при значении Pв=0,5, которое здесь, по-видимому, следует рассматривать как критическое.
Наиболее близким по техническому существу к предлагаемому является способ увеличения САС космических аппаратов, заключающийся в том, что устанавливают на искусственном спутнике инфракрасный (ИК) датчик факела ракет на фоне Земли, выводят спутник при помощи тяги ракетных двигателей (ракеты-носителя) на заданную орбиту и запитывают ИК датчик электроэнергией от солнечных батарей (СБ) повышенной мощности [2]. Спутник содержит также другое инженерное обеспечение, необходимое для выполнения полетной задачи: телескоп (ориентирует ИК датчик на Землю), системы управления, связи с Землей, астрокоррекции, стабилизации орбиты, программно-математическое обеспечение и т.п.
Фотоэлементы СБ с химическими источниками тока обеспечивают длительное электропитание бортовой аппаратуры спутника, в т.ч. при решении задач предупреждения о ракетном нападении. Но, метеорная эрозия, как один из влияющих факторов космоса, со временем разрушает оптически чувствительную поверхность этих элементов, чем уменьшает коэффициент их преобразования солнечной энергии в электрическую. Бортовой энергетический баланс постепенно нарушается и приборы, вследствие прогрессирующей нехватки электроэнергии перестают нормально функционировать. САС спутников с обычными СБ на околоземных орбитах не превосходит 2-3 лет. Его увеличение связано с мощностью СБ. Чем она выше - тем больше САС, т. к. возникает соответствующий резерв времени. Повышение резерва возможно: применением лучших, чем монокристаллический кремний или арсенид галлия полупроводниковых материалов (аморфный гидрогенизированный кремний); увеличением площади панелей, влияющем на весовое совершенство и вероятность пробоя СБ как большей метеорной мишени; повышением КПД панели за счет более полного использования солнечного спектра пленочными полупроводниковыми преобразователями. Пленочная технология (геометрический размер 0,6-0,35 микрона и 20 слоев на кристалле) освоена корпорацией "Intel" (США) при производстве 32 разрядных процессоров.
Однако столкновение с метеорными частицами или с остатками околоземных космических аппаратов угрожает работоспособности не только СБ, но и спутника в целом. Так, в околоземном космосе на январь 1989 г. (момент составления доклада КОСПАР) находилось приблизительно 7000 объектов искусственного происхождения размером более 20 см, 2000 объектов размером 10-20 см, 50000 объектов размером 1-10 см и миллиарды объектов до 1 см.
Военный аспект этой проблемы: в 1959 г. США испытали противоспутниковое оружие, применив ракету, запущенную с бомбардировщика В-47 для перехвата ИСЗ "Эксплорер-6"; известен проект Ливерморской лаборатории США "Сверкающие камешки" на базе малогабаритной ракеты с размером около 1 метра, которая может быть размещена как в космосе, так и на Земле.
Указанные способы не обеспечивают надежность (другими словами живучесть) космического аппарата при соударении с внешними телами, двигающимися под разными углами к его траектории и обладающими при этом достаточным запасом кинетической или взрывной энергии. Поэтому во всех случаях такого взаимодействия не исключена возможность выхода аппарата из строя до истечения гарантированного времени работы, что крайне нежелательно из-за большой дороговизны подобных объектов, сложности и трудоемкости их изготовления, по причинам соперничества.
Задача изобретения - сохранение живучести космических аппаратов от воздействия внешних тел.
Задача решается тем, что в известном способе увеличения САС космических аппаратов, принятом за прототип [2], заключающемся в том, что устанавливают на спутнике ИК датчик, выводят спутник при помощи тяги двигателей на заданную орбиту и запитывают ИК датчик солнечной электроэнергией, дополнительно устанавливают на спутнике радиолокационный (РЛ) датчик внешних тел на фоне космоса, излучают РЛ датчиком электромагнитные волны в пространство вне Земли, после приема им электромагнитных волн, отраженных от указанных тел повторно запускают двигатели и переводят спутник на безопасную орбиту, а питают оба датчика по очереди. Кроме того, до повторного запуска двигателей метеорные тела сортируют по параметрам излучения-приема субсантиметровых радиоволн, а в качестве критериев сортировки используют расчетные точку встречи и уровень кинетической энергии удара тел. Векторы тяги двигателей направляют под углами ±60, 90-93o к вектору скорости движения спутника в плоскости перпендикулярной следу заданной орбиты.
Автор не знаком с аналогичными решениями поставленной задачи в данной или близких областях техники. Всвязи с чем изложенная совокупность отличительных признаков считается существенной.
Способ увеличения сроков активного существования космических аппаратов поясняется фигурами 1, 2, 3 и 4.
На фигуре 1 представлена общая схема осуществления способа, где позиция 1 - Земля, 2 - след плоскости ортогональной проекции заданной орбиты космического аппарата, 3 - возможная диаграмма направленности ИК датчика, 4 - проекция космического аппарата, 5 - область (объем) сканирования космического пространства РЛ датчиком, 6 - внешнее тело, 7 - след плоскости ортогональной проекции одной из возможных безопасных орбит космического аппарата, 8, 9 - проекции на плоскость чертежа направлений векторов тяги повторно запускаемых двигателей КА.
На фигуре 2 приведена структурная схема блока управления питанием РЛ, ИК датчиками. Блок содержит последовательно соединенные генератор импульсов 10, элемент И-НЕ 12, инвертор 13 и второй коммутатор мощности 16, линию задержки 11, входом подключенную к выходу генератора импульсов 11, первый коммутатор мощности 15, входом соединенный с выходом элемента И-НЕ 12, и энергетическую установку 14, выход которой соединен с силовыми входами коммутаторов мощности 15, 16.
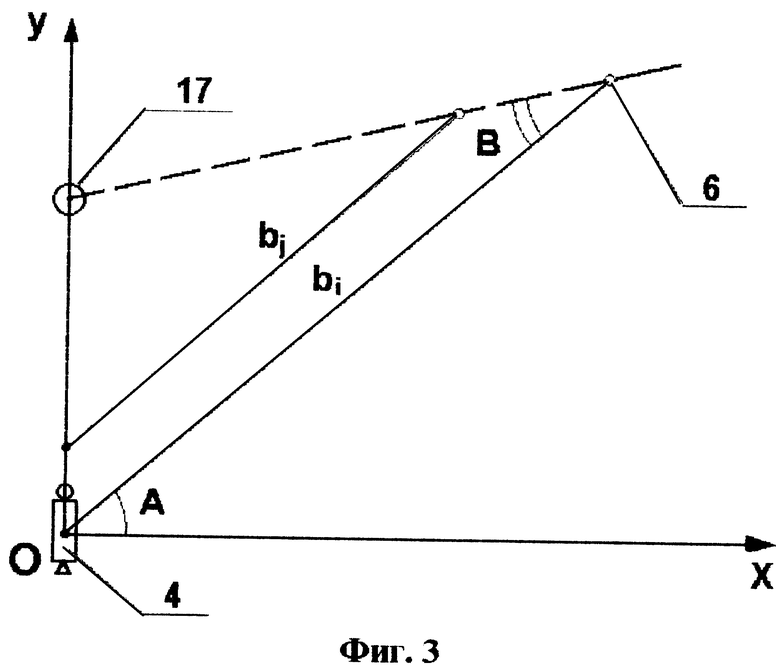
На фигуре 3 представлен рисунок к расчету в линейном приближении точки встречи 17 космического аппарата с телом 6 в плоскости заданной орбиты.
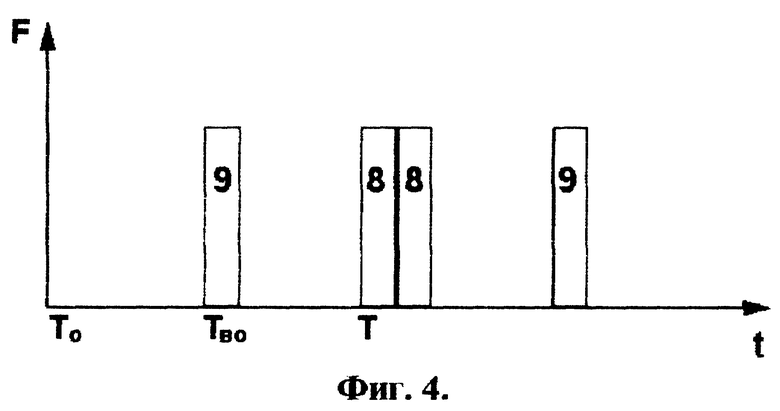
На фигуре 4 - временная диаграмма импульсов тяги 8 и 9 повторно запускаемых корректирующих двигателей.
Способ заключается в следующем.
Устанавливают на искусственном спутнике 4 с ИК датчиком и другим инженерным обеспечением дополнительно РЛ датчик внешних тел, например, при сборке космического аппарата на предприятии-изготовителе (операции установки и датчики на фигурах не показаны).
РЛ датчик объединяет антенную систему соответствующего типа, приемо-передающий тракт и электронное (оптическое) оборудование для измерения и регистрации сигналов. При сортировке внешних тел в его состав входит электронно-вычислительный блок (машина), обеспечивающий расчет в реальном масштабе времени точки встречи и уровня кинетической энергии соударения спутника и внешнего тела.
Выводят спутник при помощи тяги ракетных двигателей (ракеты-носителя) на заданную (полярную, промежуточную, селеноцентрическую и т.п.) орбиту 2. На орбите (см. фигуру 1) его запитывают от СБ, ядерной энергетической установки и/или других долговременных источников энергоснабжения 14.
РЛ, ИК датчики питают по очереди, обеспечивая полет спутника в дежурном режиме (сканирование космического пространства на внешнюю опасность и поиск факела ракет на фоне Земли). Переключение питания модулирует информацию датчиков, которая в последующем восстанавливается.
Питание датчиков поясняется на примере устройства (фигура 2). Оно работает следующим образом. С генератора импульсов 10 прямоугольные колебания определенной частоты поступают одновременно на вход линии задержки 11 и один из входов элемента И-НЕ 12, на другом входе которого присутствует логическая 1. Поэтому прямоугольные колебания с генератора 10 проходят на выход элемента И-НЕ 12 с повернутой на 180o фазой и, вследствие инвертирования элементом 13, на его выход - повернутые на 360o. Так как выходы этих элементов связаны с управляющими входами первого 15 и второго 16 коммутатора мощности, силовыми входами соединенными с выходом энергетической установки 14, то с выходов коммутаторов питание на РЛ и ИК датчики поступает попеременно. Задержку включения коммутаторов компенсируют подачей во времяизмерительные цепи датчиков с линии задержки 12 аналогично запаздывающих синхроимпульсов Us. С первым сигналом (Uвт или Uво) обнаружения тела 6 логическая 1 на втором входе элемента 12 меняет свое значение на 0 и прохождение через него прямоугольных колебаний блокируется. На выходе элемента 12 устанавливается логическая 1, инвертор выдает логический 0. Следовательно, первый коммутатор мощности 15 подаст на РЛ датчик питание Uрл, второй коммутатор мощности 16 - прекратит питание ИК датчика, т.е. Uик=0. Нужные характеристики питания датчиков настраивают регулировкой параметров генератора 10 (изменением частоты, скважности и длительности импульсов).
Переключение питания рассчитывается исходя из полетной задачи аппарата. Например, задача дежурного режима для некоторой расчетной дальности обнаружения тела 6 выполнима, в частности, при скважности 2 и частоте импульсов около 375 Гц, при этом ошибка определения ИК датчиком местоположения ракеты на активном участке полета составит 22-25 м. Возможны несимметричные переключения питания.
Излучают РЛ датчиком электромагнитные волны в пространство вне Земли. Антенна - ФАР, например, дорабатываемые определенным образом несущие конструкции с сотовым металлическим заполнителем (на фигурах не показана), генераторы и приемники, - известные электровакуумные, полупроводниковые приборы. Угловое положение луча выбирается излучением электромагнитной волны в необходимый момент времени, а также фазовым или временным сдвигом колебаний в решетках, что компенсирует изменение положения датчика при движении аппарата 4 по траектории. Вид диаграммы направленности антенны сходен с позицией 3, но внутри области 5. В дальнем космосе эта область может достигать полного объема сферы 5.
Принимают антенной электромагнитные волны, отраженные от внешних тел. В момент времени То датчик вырабатывает первый сигнал Uвт обнаружения тела, инженерное обеспечение спутника из дежурного автоматически переходит в основной режим и оценивает степень угрозы космическому аппарату по критериям: 1). Наличие точки встречи аппарата и тела в пространстве (см. фигуру 3); 2). Уровень кинетической энергии (достаточен или нет) в случае взаимодействия космических тел. Оценка формируется машинным расчетом этих характеристик, например, на ЭВМ с векторным процессором. Волнами субсантиметровой длины (менее 1 см) получают сигналы от метеорных тел с миллиметровыми и превосходящими их размерами. Для чего, учитывая программу полета, уровень техники и т. п. , используют радиоволновый, инфракрасный и\или оптический диапазоны волн, что гарантирует своевременность уклонения спутника.
Основной режим характеризуется увеличением в единицу времени числа локационных посылок по сравнению с дежурным режимом, может предусматривать непрерывную генерацию зондирующей электромагнитной волны при соответствующей ее модуляции, питание ИК датчика отключается (см. фигуру 2 и пояснения к ней). Это увеличивает точности измерения дистанции, скорости и угловых характеристик внешних тел.
При наличии обоих критериев (особоопасное внешнее тело) РЛ датчик генерирует в момент времени Тво сигнал внешней опасности - Uво, по которому системой управления производится повторный запуск ракетных двигателей спутника. Если критерий 1) отсутствует, то Uво не генерируется и повторный запуск двигателей спутника не производится. Это означает, что хотя тело (неопасное внешнее тело) датчиком обнаружено, однако его траектория в пределах ошибки измерения или некоторой контролируемой датчиком зоны заданных пространственных размеров не имеет общей точки с траекторией космического аппарата в один и тот же момент времени. При отсутствии критерия 2) (опасное внешнее тело) сигнал Uво либо генерируется, либо не генерируется в зависимости от дополнительных условий, накладываемых особенностями назначения, эксплуатации и возможности ремонта/замены спутника. Критерии минимизируют ложные срабатывания датчика, повторные включения двигателей, связанные с этим затраты массы горючего, окислителя.
Определение критерия 1) для неуправляемых внешних тел математически сводится к задаче расчета времени преследования цели до ее поражения на основе метода параллельного сближения. Решение о цели принимается ЭВМ по точному алгоритму для двух времен преследования T1 и Т2, разделенных временным интервалом ΔT. T1, T2 - вычисляются ЭВМ по известной из теоретической механики формуле с использованием результатов измерений РЛ датчика. Критерий 2). Кинетическая энергия соударяющихся тел. Ищется через значение массы внешнего тела по спектральным коэффициентам отражения его вещества и коэффициенту формы. РЛ датчик работает дуплетом, например, в миллиметровом и инфракрасном диапазонах. Оценка рассчитывается ЭВМ обработкой измерений с первого дуплета при обучении датчика распознаванию коэффициентов. Остальные данные для расчетов критериев считаются известными.
После повторного запуска двигателей коррекции в момент времени Тво спутник 4 под действием возникающей реактивной силы переводится на безопасную орбиту 7, для которой критерии не определяются. Для уклонения аппарата 4 от точки встречи подходят двигатели большой тяги с малым временем запуска, в частности, РДТТ и ЖРД, допускающие многократный запуск. Ограничивающие условия: величина ускорения (перегрузки), число повторных запусков и т.д. Быстрый запуск и большая тяга корректирующих двигателей гарантируют динамичное и достаточное уклонение спутника от расчетной точки встречи 17 (заданное расстояние от этой точки) в момент времени ее фактического прохождения внешним телом 6. Величина уклонения вычисляется с использованием дифференциальных уравнений движения точки переменной массы, известных из курса теоретической механики.
Векторы тяги 8, 9 двигателей коррекции направляют под углами ±60o к вектору скорости движения спутника в плоскости перпендикулярной следу заданной орбиты (на фигуре 1 проекции этих векторов на плоскость чертежа расположены под углом 90o к следу 2), т.е. перевод аппарата на безопасную орбиту 7 и возврат на заданную происходит без потери высоты над планетой 1. Тягу F создают импульсами поочередно включаемых двигателей (см. фигуру 4). Последовательность импульсов 9, 8 переводит и "закрепляет" спутник 4 на новой (левой от заданной) орбите. Импульс 8 выгодно включать в расчетный момент времени Т или позже, т.к. тогда расстояние между спутником 4 и телом 6 в расчетной точке встречи 17 будет максимальным. Последовательность 8, 9 возвращает спутник на исходную орбиту. Промежутки времени между импульсами 8, 9 и 9, 8 равные. Маневр производится и при углах векторов тяги ±90-93o, что, несущественно изменяя заданную орбиту, экономит энергию, расход материалов и сохраняет ресурс двигателей.
Управление корректирующими двигателями КА, ФАР, питанием датчиков производит ЭВМ системы управления, имеющая необходимые устройства (интерфейсы).
С возвратом спутника продолжают наблюдение факела ракет на фоне Земли. Возможная диаграмма 3 направленности ИК датчика (ее сечение) показана на фигуре 1. Диаграмма может иметь другую конфигурацию в зависимости, например, от задачи наблюдения или точности орбитального маневра аппарата.
Информацию ИК датчика транслируют со спутника по радиолинии на Землю для принятия необходимых мер.
Предлагаемый способ может найти применение в ИСЗ, автоматических межпланетных станциях и пилотируемых полетах, в т.ч. на другие планеты, аппаратах специального назначения, околоземных космических электростанциях будущего.
Его реализация продлит сроки активного существования космической техники, уменьшит число изготавливаемых и запускаемых объектов, сэкономит материальные, сырьевые и энергетические ресурсы.
Даст дополнительно существенный финансовый выигрыш, уменьшит техногенное загрязнение околоземного пространства и угрозу аварий в нем.
Источники информации, принятые во внимание:
1 Гэтланд К. Космическая техника. Иллюстрированная энциклопедия. Пер. с англ. -М.: Мир 1986, 295 с.
2. Павлов В. Развитие в США космической системы раннего предупреждения. Зарубежное военное обозрение. 1990, N 3, 40-42.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УВЕЛИЧЕНИЯ СРОКОВ АКТИВНОГО СУЩЕСТВОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 1996 |
|
RU2166464C2 |
| СПОСОБ УВЕЛИЧЕНИЯ СРОКОВ АКТИВНОГО СУЩЕСТВОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 1996 |
|
RU2137682C1 |
| СПОСОБ ЗАЩИТЫ КОСМИЧЕСКИХ АППАРАТОВ ОТ МЕТЕОРНЫХ ЧАСТИЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2128609C1 |
| Способ управления движением центра масс низкоорбитального космического аппарата | 2023 |
|
RU2837207C1 |
| СПОСОБ ПЕРЕДАЧИ ВИЗУАЛЬНО ВОСПРИНИМАЕМОЙ ИНФОРМАЦИИ | 2018 |
|
RU2704914C2 |
| СПОСОБ ВЫПОЛНЕНИЯ МАНЕВРА УКЛОНЕНИЯ КОСМИЧЕСКОГО АППАРАТА ОТ СТОЛКНОВЕНИЯ НА ОРБИТЕ С ДРУГИМИ ТЕЛАМИ | 2015 |
|
RU2586920C1 |
| Способ авиационно-космического выведения на околоземную орбиту малых искусственных спутников | 2018 |
|
RU2724001C2 |
| СПОСОБ ПЕРЕДАЧИ РАБОЧЕГО ВЕЩЕСТВА ДЛЯ ДВИГАТЕЛЕЙ КОСМИЧЕСКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2385275C1 |
| Устройство уборки космического мусора | 2021 |
|
RU2769579C1 |
| СТАБИЛИЗАЦИЯ ДВИЖЕНИЯ НЕУСТОЙЧИВЫХ ФРАГМЕНТОВ КОСМИЧЕСКОГО МУСОРА | 2010 |
|
RU2505461C1 |

Изобретение относится к исследованиям и освоению космич. пространства и может быть использовано в космич. объектах различного назначения. Согласно изобретению на спутнике наряду с инфракрасным датчиком устанавливают радиолокационный датчик внешних тел и излучают последним эл.-магн. волны в пространство вне Земли. При этом оба датчика питают энергией по очереди. После приема эл. -магн. волн, отраженных от внешних тел, переводят спутник на безопасную орбиту. Для этого повторно запускают двигатели спутника, предварительно проведя сортировку внешних тел по критериям: расчетной точке встречи и энергии удара тел. Описаны алгоритмы функционирования и отдельные элементы космич. аппарата, где реализуется данный способ. Изобретение позволяет сохранять живучесть космич. аппаратов путем исключения их соударений с опасными внешними, в том числе метеорными, телами. 2 з.п.ф-лы, 4 ил.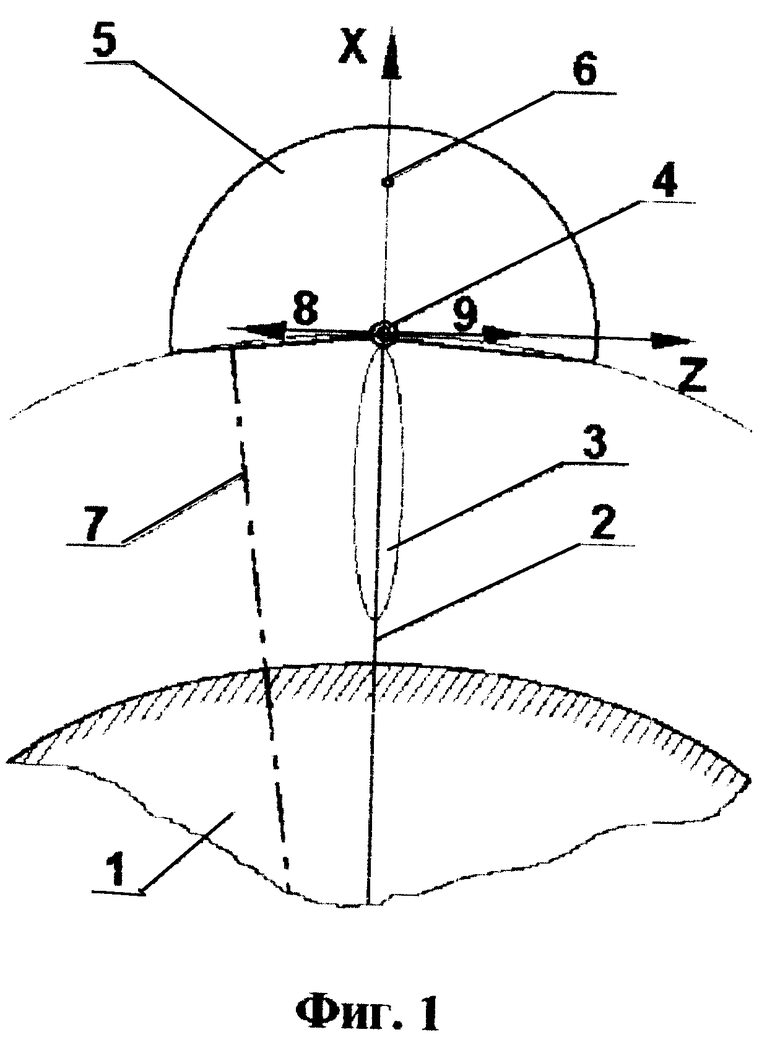
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Павлов В | |||
| Развитие в США космической системы раннего предупреждения | |||
| Зарубежн.воен.обозрение | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Космическая техника | |||
| Иллюстрир | |||
| Энциклопедия /Под ред | |||
| К.Гэтланда | |||
| - М.: Мир, 1986, с | |||
| УСТРОЙСТВО ПАРОПЕРЕГРЕВАТЕЛЯ | 1920 |
|
SU295A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Космическое оружие: дилемма безопасности /Под ред.акад | |||
| Е.П.Велихова и др | |||
| - М.: Мир, 1986, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 3243147 A, 29.03.66. | |||
