Изобретение относится к исследованиям и освоению космического пространства и может быть использовано в космических объектах различного назначения.
Известен способ увеличения сроков активного существования (САС) космических аппаратов, заключающийся в том, что образуют перед звездолетом облако из механических частиц, кинетически воздействуют облаком на встречное по курсу звездолета космическое тело и избегают с ним столкновения вследствие его разрушения и испарения частицами облака [1].
Способ упускает шанс (1-Рв) не встречного столкновения звездолета и тела (неизвестные астероиды, кометы и т.п.), где Pв - вероятность их лобового удара. Полагая, что САС есть время от начала полета до рокового события, обратим внимание на отношение полетного Тп и пролетного Тпр времен звездолета, явно большее 1 для экспедиции к звезде Барнарда при проектной скорости 0,1 от скорости света (проект "Дедал"). Следовательно, столкновение возможно на интервале полетного времени, т.к. (1-Рв)Тп > PвТпр, даже при значении Pв = 0,5, которое здесь, по-видимому, следует рассматривать как критическое.
Наиболее близким по техническому существу к предлагаемому является способ увеличения САС космических аппаратов, используемый при решении задач предупреждения о ракетном нападении, заключающийся в том, что устанавливают на искусственном спутнике инфракрасный (ИК) датчик факела ракет, выводят спутник тягой ракетных двигателей (ракеты-носителя) на заданную орбиту и запитывают датчик электроэнергией от солнечных батарей (СБ), при этом сканируют датчиком пространство на фоне Земли [2]. Спутник содержит и другое необходимое инженерное обеспечение: телескоп, системы управления, связи с Землей, астрокоррекции, стабилизации орбиты, программно-математическое обеспечение и т.п.
СБ с химическими источниками тока обеспечивают длительное электропитание аппаратуры ИСЗ. Но метеорная эрозия со временем разрушает поверхность фотоэлементов, чем уменьшает преобразование солнечной энергии. САС спутников с обычными СБ на околоземных орбитах не превосходит 2-3 лет. Чем больше мощность СБ - тем выше САС, т.к. возникает резерв времени питания. Резерв повышается применением лучших, чем монокристаллический кремний или арсенид галлия полупроводниковых материалов; увеличением площади панелей, влияющем на весовое совершенство и вероятность пробоя СБ, как большей метеорной мишени; большим КПД панели за счет более полного использования солнечного спектра пленочными полупроводниками последовательно нанесенными на подложку.
Однако СБ и спутнику в целом угрожает не только столкновение с метеорными частицами, но и с остатками околоземных космических аппаратов. Так, в околоземном космосе на январь 1989 г. (момент составления доклада КОСПАР) находилось приблизительно 7000 объектов искусственного происхождения размером более 20 см, 2000 объектов размером 10-20 см, 50000 объектов размером 1-10 см и миллиарды объектов до 1 см.
Военный аспект проблемы: в 1959 г. США испытали противоспутниковое оружие, применив ракету, запущенную с бомбардировщика В-47 для перехвата ИСЗ "Эксплорер-6"; известен проект Ливерморской лаборатории "Сверкающие камешки" на базе малогабаритной ракеты с размером около 1 метра, которая может быть размещена в космосе и на Земле.
Указанные способы не обеспечивают надежность (другими словами живучесть) космического аппарата при соударении с внешними телами, двигающимися под разными углами к его траектории и обладающими при этом достаточным запасом кинетической или взрывной энергии. Поэтому во всех случаях такого взаимодействия не исключена возможность выхода аппарата из строя до истечения гарантированного времени работы, что крайне нежелательно не только по причинам соперничества, но и из-за большой дороговизны подобных объектов, сложности и трудоемкости их изготовления.
Задача изобретения - сохранение живучести космических аппаратов от воздействия внешних тел.
Поставленная задача решается тем, что в известном способе увеличения САС космических аппаратов, принятом за прототип [2], заключающемся в том, что устанавливают на спутнике датчик, выводят спутник тягой двигателей на заданную орбиту, запитывают датчик энергией солнечных батарей и сканируют им пространство на фоне Земли, используют датчик радиолокационного действия, сканируют им пространство на фоне космоса, например, посредством фазированных антенных решеток, по параметрам излучения и приема электромагнитных волн сортируют внешние тела, критериями сортировки используют расчетные точку встречи и время до соударения спутника и внешнего тела, а после приема датчиком отраженных электромагнитных волн от внешнего тела и нехватке времени на перезапуск двигателей и перемещение спутника на безопасную орбиту подают соплом в точку встречи спутника и внешнего тела поток с частицами. Кроме того, поток с частицами создают, например, истечением газа под давлением с введением в струю порошка алюминия. Положение сопла выбирают вблизи ячейки антенной решетки.
Автор не знаком с аналогичными решениями поставленной задачи в данной или близких областях техники. В связи с чем, изложенную совокупность отличительных признаков считает существенной.
Способ увеличения сроков активного существования космических аппаратов поясняется фиг. 1, 2 и 3.
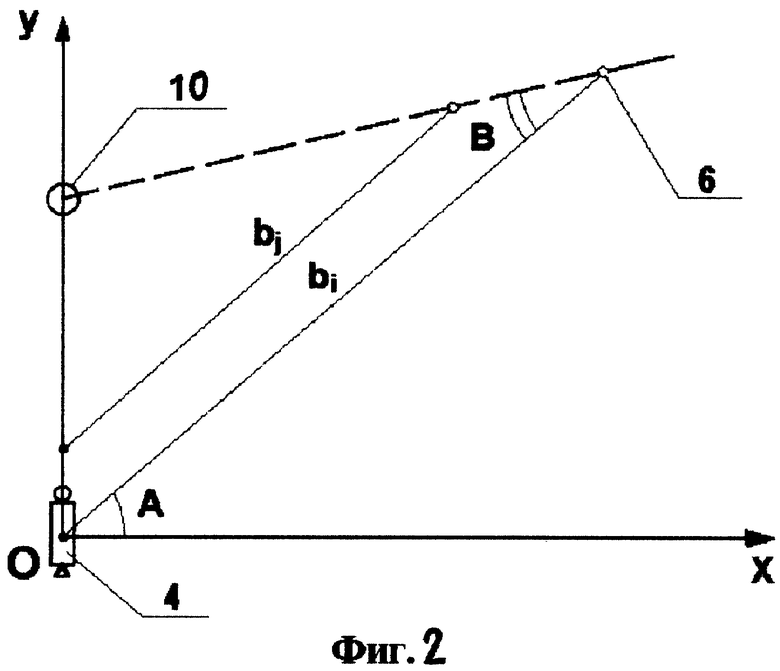
На фиг. 1 общая схема предложенного способа, где 1 - Земля, 2 - след плоскости заданной орбиты спутника, 3 - диаграмма направленности ориентированного на Землю ИК датчика факела ракет, 4 - проекция спутника, 5 - область (объем) сканирования радиолокационным (РЛ) датчиком, 6 - внешнее (метеорное) тело, 7 - след плоскости одной из безопасных орбит спутника, 8,9 - векторы тяги корректирующих двигателей.
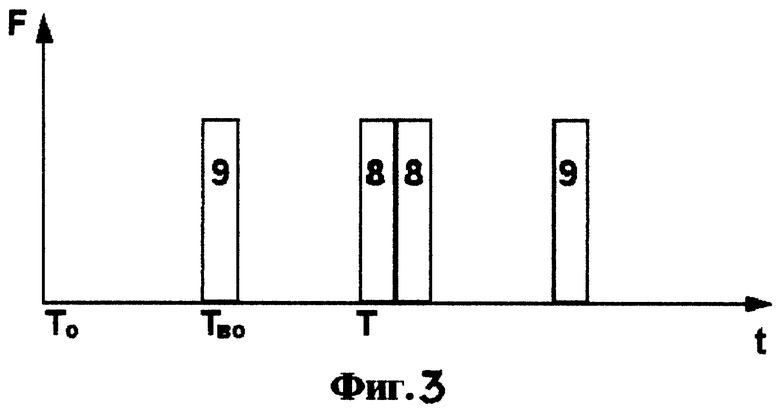
На фиг. 2 рисунок к расчету в линейном приближении наличия точки встречи 10 космического аппарата с телом 6 в плоскости заданной орбиты.
На фиг. 3 - временная диаграмма импульсов тяги корректирующих двигателей.
Способ заключается в следующем.
Устанавливают на спутник 4 РЛ датчик и другое инженерное обеспечение, что осуществляют на предприятии-изготовителе или при общей сборке космического аппарата на космодроме, а также в космосе, если это предусмотрено технологическими и монтажными операциями космического объекта (на чертежах датчик и операция установки не показаны).
РЛ датчик объединяет соответствующие антенную систему, приемопередающие тракты, электронное (оптическое) оборудование для измерения и регистрации сигналов, и электронно-вычислительный блок (машину) для управления сканированием и расчетов по сортировке.
Выводят спутник ракетой-носителем на заданную (геостационарную, полярную, селеноцентрическую и т.п.) орбиту 2 (см. фиг. 1) и запитывают РЛ датчик от СБ, ядерной энергетической установки и/или других долговременных источников энергоснабжения, что обеспечивает полет спутника в дежурном режиме (сканирование пространства на внешнюю опасность).
Излучают РЛ датчиком электромагнитные волны в пространство (вне притягивающего тела 1) на фоне космоса. Антенна, - например, ФАР миллиметрового диапазона (на чертежах не показана), генераторы и приемники, -электровакуумные (полупроводниковые) приборы. Угловое положение луча (ориентация датчика) выбирается излучением электромагнитной волны в необходимый момент времени и фазовым или временным сдвигом колебаний в решетках - ячейки несущей конструкции с поверхностью второго порядка, что компенсирует изменение положения датчика при движении аппарата 4 по траектории. Диаграмма направленности антенны (сопла) сходна с позицией 3, но внутри области 5. В дальнем космосе эта область может быть сферой.
Принимают антенной электромагнитные волны, отраженные от внешних тел. В момент времени Т0 датчик вырабатывает первый сигнал Uвт обнаружения внешнего тела, инженерное обеспечение спутника из дежурного автоматически переходит в основной режим и оценивает в реальном масштабе времени степень угрозы космическому аппарату по критериям: 1) наличие точки встречи аппарата и тела в пространстве (см. фиг. 2); 2) время до соударения космических тел, т.е. достаточно оно или нет для перемещения спутника 4 под действием возникающей реактивной силы после повторного запуска ракетных двигателей (двигателей коррекции) в момент времени Тво (см. фиг. 3) на безопасную орбиту 7, - орбиту, для которой критерии не определяются. Оценка формируется машинным расчетом этих характеристик, например, на ЭВМ с векторным процессором.
Для уклонения аппарата 4 от расчетной точки встречи 10 с телом 6 применяют двигатели большой тяги с малым временем запуска. Дополнительные ограничения - величина ускорения (перегрузки), число повторных запусков и т.д. Подходят РДТТ и ЖРД, в перспективе электроракетный двигатель или их комбинации, лазерный двигатель. Изображения на фиг. 1 и на фиг. 2 при отмеченном на них положении тела 6 соответствуют моменту времени То.
Основной режим отключает питание инженерного обеспечения, не решающего проблемы внешней угрозы, увеличивает число локационных посылок в единицу времени по сравнению с дежурным режимом, может предусматривать непрерывную генерацию зондирующей электромагнитной волны для увеличения точности радиолокационных измерений и обеспечивает обработку внешних тел или уклонение от них спутника.
По наличию обоих критериев (особоопасное внешнее тело), т.е. нехватке времени на уклонение спутника от точки встречи, РЛ датчик генерирует в момент времени Тво сигнал внешней опасности - Uво, по которому системой управления производится обработка тела струей газа с частицами. Газ, например, кислород и др., частицы - порошок алюминия, кусочки пластмассовой пленки и т. п. Нехватка времени, например, вызвана внешним телом с сантиметровыми размерами, т. к. оно из-за малости эффективной площади рассеивания электромагнитных волн определяется на близких дистанциях и квалифицируется датчиком как угрожающее из особоопасных существованию спутника. Радиосигнал об этом передается на Землю.
Получив Uво ЭВМ (датчика, системы управления) высчитывает промежуточную точку встречи тел и управляет подачей в нее с помощью сопла направленного потока частиц (на чертежах не показано). Не исключено, что промежуточная точка совпадет с областью 10. Обработку производят, например, потоком частиц с расходом 2-5 кг/с и размером фракций 10-300 микрон, используя быстродействующие (время срабатывание 0,002-0,001 с) многоклапанные системы под давлением. При отношении давлений между камерой и выходным сечением сопла 100/1 газ дает скорость истечения примерно 2,5 числа Маха. Обработка продуктами сгорания РДДТ с металлизированными топливами более эффективна, т.к. скорость их истечения выше скорости истечения газа, а относительная близость высокотемпературных частиц может "ослепить" тепловую головку преследующей ракеты.
Местоположение электромагнитных клапанов и распыляющих сопел выбирают вблизи (с шагом или непосредственно) ячеек ФАР. Для управления соответствующими клапанами (соплами) ЭВМ оснащена необходимым программно-математическим обеспечением и интерфейсными устройствами.
Распыляют также жидкости (аэрозоль), например, на основе смеси спирта с водой для экономии расходных веществ на единицу их объема в ИСЗ.
Если критерий 1) отсутствует, то Uво не генерируется и уклонение спутника не производится. Это означает, что хотя тело (неопасное внешнее тело) РЛ датчиком обнаружено, его траектория в пределах ошибки измерения или контролируемой датчиком пространственной зоны не имеет общей точки с траекторией космического аппарата в некоторый момент времени.
В отсутствии критерия 2) (опасное внешнее тело) сигнал Uво либо генерируется, либо нет в зависимости от особенностей назначения, эксплуатации и возможности ремонта/замены спутника. Критерии минимизируют ложные срабатывания РЛ датчика, повторные включения двигателей (сопел), расход используемых веществ, в т.ч. на обработку внешних тел.
Определение критериев для неуправляемых внешних тел математически сводится к задаче расчета времен преследования цели до ее поражения на основе метода параллельного сближения. Решение о цели принимается ЭВМ по точному алгоритму для двух времен преследования T1 и T2, разделенных временным интервалом ΔT T1, T2 - вычисляются ЭВМ по известной из теоретической механики формуле из результатов измерений РЛ датчика с учетом времени перевода ИСЗ на безопасную орбиту, которое не может быть меньше времен счета ЭВМ, перезапуска и работы корректирующего двигателя.
Для уклонения без потери высоты орбиты над Землей из-за аэродинамического воздействия воздуха векторы тяги 8, 9 корректирующих двигателей обращают под углами +/- 90-93 градусов (преимущественно +/- 91 градус) к вектору скорости движения спутника, в плоскости, перпендикулярной следу заданной орбиты (на фиг. 1 проекции этих векторов на плоскость чертежа расположены под углом 90 градусов к следу 2). Векторы обеспечивают аппарату 4 перемещение на безопасную орбиту 7 и возврат в первоначальную плоскость движения. Тягу F создают двумя последовательными импульсами двигателей (см. фиг. 3). Импульсы 9, 8 переводят и "закрепляют" спутник на новой (левой от заданной) орбите, при этом импульс 8 выгодно включать в момент времени Т или позже, т.к. тогда расстояние между спутником 4 и телом 6 в точке встречи 10 будет максимальным. Вторая (обратная) последовательность, т.е. 8, 9 возвращает спутник на исходную орбиту 2. Промежутки времени между импульсами 8, 9 и 9, 8 равны. Запуск двигателя коррекции вращает плоскость орбиты ИСЗ вокруг пространственной оси (на фиг.1 совпадает с позицией 2), проходящей через центр масс спутника и притягивающего тела 1.
Характеристики уклонения вычисляют на основе дифференциальных уравнений движения точки переменной массы. При допущении расстояния от точки встречи 56,5 м для ИСЗ (ускорение силы тяжести 9,82 м/с2) на высоте 200 км при модуле круговой орбитальной скорости 7790 м/с, начальной массе 2000 кг, массовом секундном расходе топлива корректирующего двигателя 10 кг/с и значении его удельного импульса пустотной тяги 2500 м/с, направленного к вектору орбитальной скорости под углом около 90 градусов в плоскости, перпендикулярной следу орбиты, время работы двигателя составит 3 с. Аналогичные величины, включая время счета ЭВМ и перезапуска двигателя можно принять ограничительными параметрами конкретного спутника.
Последовательность включения корректирующих двигателей вытекает из расчета (в заявке нет) координат точки встречи, - области пространства 10. Алгоритм включения следующий (см. фиг. 1). Если расчетная область оказывается левее следа 2 плоскости заданной орбиты или это определено РЛ датчиком, то тогда порядок включения импульсов тяги таков: 8, 9; 9, 8. Если область правее, то наоборот, т.е. 9, 8; 8, 9. Для случая на фиг.1, 3 порядок включения не имеет значения и выбирается наугад или исходит из иных соображений при работе над программой полета космического аппарата.
Указанные углы векторов тяги снижают также время вычислений для своевременности маневра при корректирующей составляющей характеристической скорости ИСЗ 1-3% орбитальной. Большие значения углов чем +/-91 градус используют для двигателей с большим значением удельного импульса тяги, меньшие - с меньшим значением этого показателя.
Данный способ увеличения САС космических аппаратов подходит для применения в ИСЗ, автоматических межпланетных станциях и других случаях.
Для пилотируемых полетов способ принципиально может обеспечить безопасность объектов с экипажем вне зависимости от происхождения внешних тел (искусственного, природного).
Его реализация повысит живучесть, уменьшит число изготавливаемых и запускаемых объектов, сэкономит энергетические, материальные и сырьевые ресурсы.
Это даст дополнительно существенный финансовый выигрыш, уменьшит техногенное загрязнение околоземного космического пространства и угрозу столкновений в нем.
Источники информации
1. Космическая техника. Иллюстрированная энциклопедия. К.Гэтланд. Пер. с англ. М.: Мир, 1986.- 295 с.
2. В. Павлов. Развитие в США космической системы раннего предупреждения. //Зарубежное военное обозрение, 1990, N 3, с. 40-42. (Прототип).
Изобретение относится к исследованиям и освоению космического пространства и может быть использовано в космических объектах различного назначения. Согласно изобретению, ориентируют бортовой датчик аппарата вне Земли и излучают им в пространство электромагнитные волны. Перезапуск двигателей и перемещение космического аппарата на безопасную орбиту осуществляют после приема датчиком отраженных электромагнитных волн от внешних тел: ракеты, ее фрагментов или метеорного тела. При нехватке времени на перезапуск двигателей подают соплом в точку встречи спутника и внешнего тела поток с частицами. Изобретение направлено на повышение живучести космических аппаратов путем их защиты от воздействия внешних тел. 2 з.п.ф-лы, 3 ил.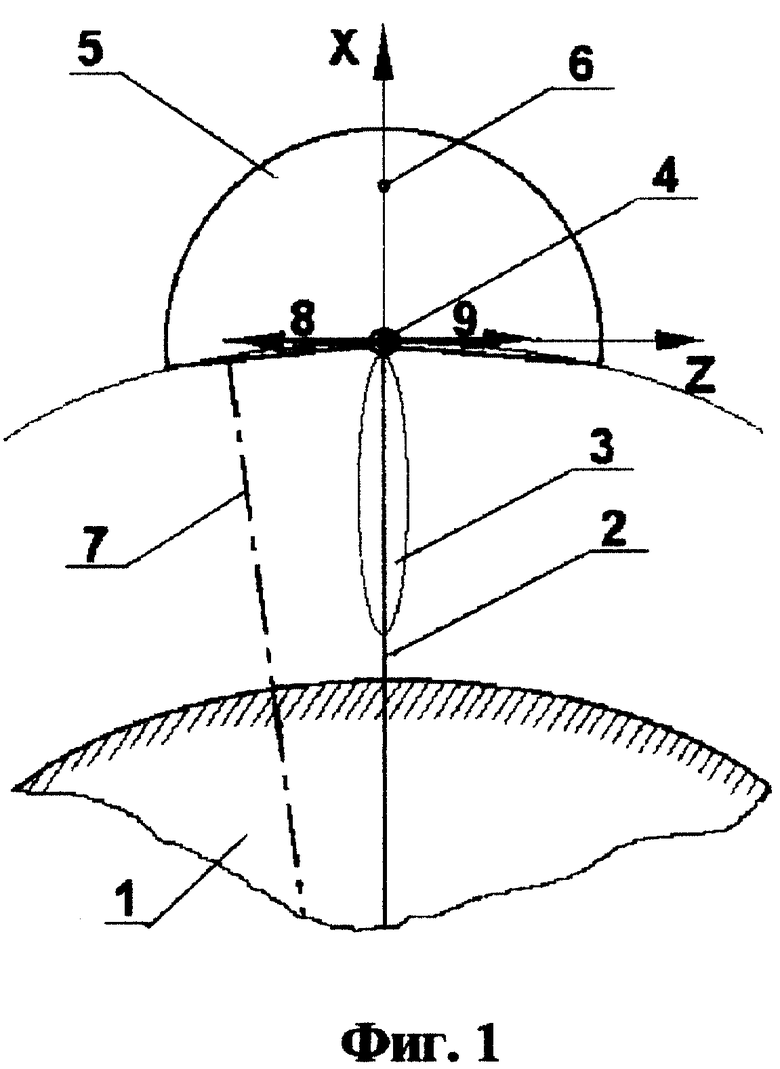
| В.ПАВЛОВ | |||
| Развитие в США космической системы раннего предупреждения | |||
| - Зарубежное военное обозрение, № 3, 1990, с.40-42 | |||
| Космическая техника | |||
| Иллюстрированная энциклопедия | |||
| Под ред | |||
| К.ГЭТЛАНДА | |||
| - М.: Мир, 1986, с.260-261 | |||
| US 3243147 A, 29.03.1966 | |||
| НАПРАВЛЯЮЩАЯ САЛАЗОК ДЛЯ СИДЕНЬЯ АВТОМОБИЛЯ И СИДЕНЬЕ, ОБОРУДОВАННОЕ САЛАЗКАМИ С ТАКИМИ НАПРАВЛЯЮЩИМИ | 1997 |
|
RU2190544C2 |
