Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам танкового вооружения.
Известны стабилизаторы танкового вооружения 2Э28М (БК1.370.058 ТО), 2Э15М (БС1.458.012 ТО). Приводы горизонтального наведения (ГН) этих стабилизаторов работают в двух режимах: в режиме нестабилизированного полуавтоматического наведения (режим ПА) и в режиме стабилизации и стабилизированного наведения с использованием гироскопического датчика угла (ГДУ) (режим А). К недостаткам этих стабилизаторов следует отнести недостаточную перебросочную скорость наведения в режиме А, ограничение которой обусловлено недостаточными моментами межрамочной коррекции гироскопического датчика угла. Реальные перебросочные скорости наведения приводов ГН этих стабилизаторов не превышают 20-22 о/с (предел для этой системы).
Наиболее близким по технической сущности к заявляемому приводу наведения и стабилизации является привод ГН стабилизатора - прототипа 2Э28М (БК1.370.058), структурная схема которого приведена на фиг. 1. Пульт наведения канала ГН этого стабилизатора имеет два механически связанных потенциометра наведения: потенциометр режима ПА - режима нестабилизированного наведения и потенциометр режима А - режима стабилизации и стабилизированного наведения через гироскопический датчик угла.
Переключение из режима ПА в режим А и наоборот осуществляется с помощью ручного переключателя режимов работы А и ПА. При включении в режим ПА гироскопический датчик угла находится в заарретированном положении и сигнал на его выходе равен нулю, привод управляется от задатчика скорости ПА, сигнал которого через 1 сумматор поступает на вход преобразователя и далее на привод. При наличии скорости привода входной сигнал задатчика уравновешивается сигналом отрицательной обратной связи датчика относительной скорости, в результате скорость объекта пропорциональна величине сигнала с потенциометра задатчика режима ПА.
При включении на ручном переключателе режима А преобразователь ПА отключается с помощью ключа и сигнал ПА на входе 2 сумматора равен нулю. ГДУ в этом режиме разарретируется по сигналу устройства управления арретиром, выполненного в виде реле и электромагнита, и стабилизатор работает в режиме А, т. е. замкнут по главной обратной связи - по сигналу ГДУ, размещенному на объекте. Наведение при этом осуществляется с помощью задатчика скорости режима А, который через электромагнит наведения ГДУ вызывает прецессию одной из его рамок.
На выходе ГДУ появляется сигнал, поступающий на вход второго сумматора и далее на привод. При наличии скорости объекта в ГДУ формируется отрицательная обратная связь, в результате скорость объекта устанавливается пропорциональной сигналу с задатчика скорости. Задатчик скорости до скоростей (4-7) о/с обеспечивает линейное изменение скорости, а далее происходит скачкообразное изменение скорости до перебросочной. В ГДУ имеется устройство межрамочной коррекции, обеспечивающее взаимную перпендикулярность рамок при наведении. При значительном нарушении перпендикулярности ("При заваливании") рамок процесс прецессии нарушается и ГДУ теряет работоспособность. Величины возмущающих моментов, вызывающих "заваливание" рамок, пропорциональны скорости наведения т. башни в режиме А, что ограничивает скорость наведения и является серьезным недостатком прототипа.
Для повышения потребительских свойств стабилизатора необходимо решить следующую техническую задачу - повысить перебросочную скорость стабилизатора в режиме А.
Сущность заявляемого изобретения заключается в том, что в привод стабилизации и наведения, содержащий последовательно соединенные задатчик скорости ПА, первый сумматор, преобразователь ПА, ключ, второй сумматор, привод, объект с расположенным на нем ГДУ с арретиром, устройством межрамочной коррекции и электромагнитом наведения, а также задатчик скорости режима А, механически связанный с задатчиком скорости режима ПА, ручной переключатель режимов работы А и ПА, устройство управления арретиром ГДУ, датчик относительной скорости, причем выход задатчика скорости А соединен с электромагнитом наведения ГДУ, выход ручного переключателя режимов А и ПА соединен со входом устройства управления арретиром и управляющим входом ключа, выход устройства управления арретиром соединен с арретиром ГДУ, вход датчика относительной скорости подключен к выходу привода, а выход датчика относительной скорости соединен со вторым инвертирующим входом первого сумматора, выход ГДУ соединен со вторым входом второго сумматора, введены последовательно соединенные блок выделения модуля, звено с зоной нечувствительности, компаратор, выход которого соединен со вторым входом устройства управления арретиром, а вход блока выделения модуля соединен с выходом задатчика скорости ПА, выход устройства управления арретиром соединен со вторым управляющим входом ключа.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков: блока выделения модуля, звена с зоной нечувствительности и компаратора и их связями с остальными элементами схемы. Таким образом, заявляемое устройство соответствует критерию изобретения "Новизна".
Сравнение заявляемого решения с другими техническими решениями показывает, что блоки формирования модуля, зоны нечувствительности и компараторы широко известны. Однако при их введении в указанной связи с остальными элементами привода наведения и стабилизации эти блоки позволяют улучшить один из основных параметров привода - перебросочную скорость в режиме А.
На фиг.1 представлена структурная схема привода-прототипа.
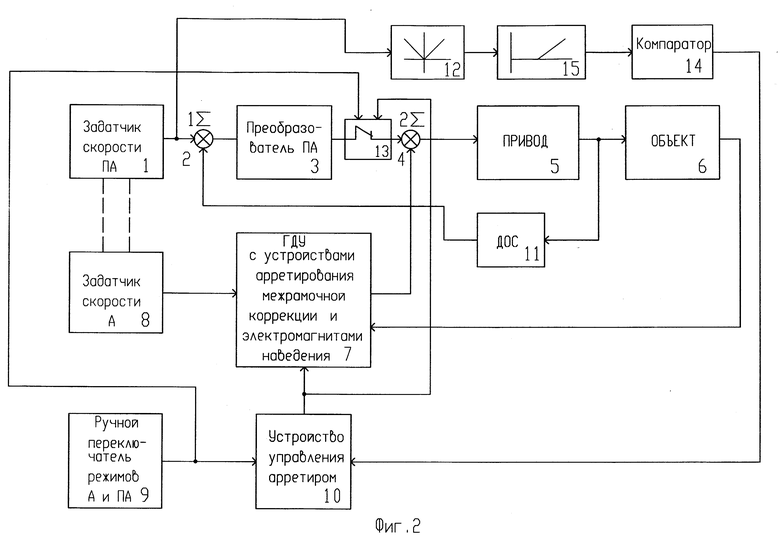
На фиг. 2 приведена структурная схема заявляемого привода наведения и стабилизации.
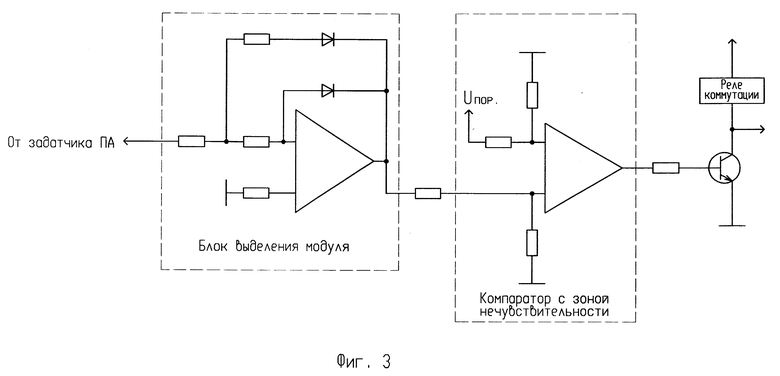
На фиг.3 показана схема конкретной реализации устройства.
Привод наведения и стабилизации (фиг. 2) содержит последовательно соединенные задатчик скорости ПА 1, первый сумматор 2, преобразователь ПА 3, второй сумматор 4, привод 5, объект 6 с расположенным на нем ГДУ 7, а также задатчик скорости режима А 8, механически связанный с задатчиком скорости ПА 1, ручной переключатель режимов работы А и ПА 9, устройство управления арретиром ГДУ 10, датчик относительной скорости объекта 11, блок выделения модуля 12, ключ 13, компаратор 14, звено с зоной нечувствительности 15, причем выход задатчика скорости А 8 соединен с электромагнитом наведения ГДУ 7, выход ручного переключателя режимов А и ПА 9 соединен со входом устройства управления арретиром 10 и управляющим входом ключа 13, выход устройства управления арретиром 10 соединен с арретиром ГДУ 7, вход датчика относительной скорости 11 подключен к выходу привода 5, а выход датчика относительной скорости соединен с инвертирующим входом первого сумматора 2, выход ГДУ 7 соединен со вторым входом второго сумматора 4, вход вновь введенного блока выделения модуля 12 соединен с выходом задатчика скорости ПА 1, выход блока выделения модуля 12 соединен с входом вновь введенного звена с зоной нечувствительности 15, выход которого соединен со входом компаратора 14, выход компаратора 14 соединен со вторым входом устройства управления арретиром 10, выход устройства управления арретиром 10 соединен со вторым управляющим входом ключа 13.
Привод работает следующим образом: при включении ручного переключателя 9 в режим ПА, ГДУ 7 заарретирован. Привод работает в режиме нестабилизированного наведения. При наведении сигнал с задатчика скорости ПА 1 положительной или отрицательной полярности через первый сумматор 2, преобразователь ПА 3 и второй сумматор 4 поступает на вход привода 5, в результате чего объект 6 приходит в движение в соответствии с фазой входного сигнала. Сигнал относительной скорости с выхода датчика относительной скорости 11 поступает на инвертирующий вход первого сумматора 2, вычитаясь из входного сигнала. В результате скорость объекта 6 устанавливается пропорциональной величине сигнала с задатчика скорости ПА 1. Параметры привода 5 позволяют развивать скорость объекта до 29 о/с. При переключении ручного переключателя режимов работы 9 в положение А по команде устройства управления арретиром 10 происходит разарретирование ГДУ 7 и отключение сигнала преобразователя ПА 3. Привод замкнут в этом режиме по абсолютному положению объекта и работает в режиме стабилизированного наведения. Задание скорости объекта производится от задатчика скорости А 8 через контур наведения ГДУ 7. В связи с тем, что задатчик скорости А 8 и задатчик скорости ПА 1 имеют между собой механическую связь, одновременно с изменением сигнала от задатчика скорости А 8 изменяется и сигнал от задатчика скорости ПА 1, сигнал от которого поступает через блок выделения модуля 12 на звено с зоной нечувствительности 15 и далее на компаратор 14.
При скорости наведения объекта (4-7) о/с происходит переключение компаратора 14 и его сигнал поступает на устройство управления арретиром 10. По этому сигналу устройство управления арретиром выдает команду на арретирование ГДУ 7 и на замыкание ключа 13, т.е. привод переключается в режим ПА и объект наводится с максимально возможной скоростью до 29 о/с, величина которой ограничивается лишь энергетикой силовых элементов привода. При уменьшении отклонения угла пульта наведения, т.е. при уменьшении сигнала от задатчика скорости ПА 1, происходит обратное переключение и привод переходит в режим А. Таким образом, в режимах наведения с перебросочной скоростью привод работает только в режиме ПА, что позволяет увеличить перебросочную скорость до (24-29) о/с.
На фиг.3 представлена схема обработки сигнала задатчика ПА 1 для переключения режима. Испытания экспериментального образца привода наведения и стабилизации, проведенные в составе доработанного стабилизатора танкового вооружения 2Э28М показали, что по сравнению со штатным стабилизатором 2Э28М скорость наведения в режиме А увеличивается с (18-20) о/с до 24 о/с.
Одновременно с увеличением перебросочной скорости исключен и такой недостаток прототипа как "выбег", т.е. эффект движения башни до согласования с направлением стабилизации ГДУ при установе ПУ в нейтральном положении в режимах, когда мощности привода не хватает для слежения за положением ДУ, поскольку при обратном переходе в режим А в заявляемом приводе обеспечиваются нулевые начальные условия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2001 |
|
RU2207489C2 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 2003 |
|
RU2238506C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2009 |
|
RU2421679C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2284443C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СТЕКЛООЧИСТИТЕЛЯ | 1999 |
|
RU2162801C1 |
| ПРИВОД СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ ТАНКОВОГО ВООРУЖЕНИЯ | 2008 |
|
RU2376548C1 |
Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам танкового вооружения. Техническим результатом является повышение перебросочной скорости стабилизатора в режиме стабилизации и стабилизированного наведения через гироскопический датчик угла (ГДУ). Привод функционирует в режиме стабилизации по каналу: ГДУ, второй сумматор, привод, объект, ГДУ. При включении режима нестабилизированного наведения ГДУ заарретирован и привод функционирует по каналу: задатчик скорости, первый сумматор, преобразователь, привод, объект, датчик относительной скорости, инвертирующий вход первого сумматора. В результате скорость объекта устанавливается пропорциональной величине с задатчика скорости. Привод снабжен последовательно соединенными блоком выделения модуля, звеном с зоной нечувствительности и компаратором, включенным между задатчиком скорости нестабилизированного наведения и входом устройства управления арретиром ГДУ, которые позволяют увеличить перебросочную скорость объекта. 3 ил.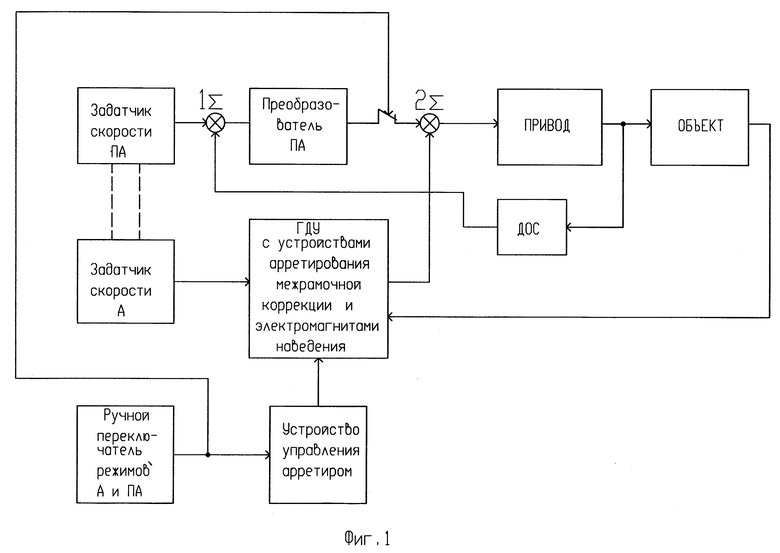
Привод наведения и стабилизации танкового вооружения, работающий в режимах нестабилизированного наведения и стабилизированного наведения, содержащий последовательно соединенные задатчик скорости, первый сумматор, преобразователь, ключ, второй сумматор, привод, гидроскопический датчик угла объекта наведения и стабилизации с устройством арретирования, межрамочной коррекции и электромагнитного наведения, а также задатчики скорости режима стабилизированного и нестабилизированного наведения, механически соединенные между собой, ручной переключатель режимов стабилизированного и нестабилизированного наведения, устройство управления арретиром гироскопического датчика угла, выполненное в виде электромагнита с механическим приводом, датчик относительной скорости объекта наведения и стабилизации, причем выход задатчика скорости режима стабилизированного наведения соединен с электромагнитом наведения гироскопического датчика угла, выход ручного переключателя режимов стабилизированного и нестабилизированного наведения соединен со входом устройства управления арретиром и первым управляющим входом ключа, выход устройства управления арретиром соединен с арретиром гироскопического датчика угла, вход датчика относительной скорости объекта подсоединен к выходу привода, а выход датчика относительной скорости соединен со вторым инвертирующим входом первого сумматора, выход гироскопического датчика угла соединен со вторым инвертирующим входом второго сумматора, отличающийся тем, что в него введены последовательно соединенные блок выделения модуля, звено с зоной нечувствительности и компаратор, выход которого соединен со вторым входом устройства управления арретиром, а вход блока выделения модуля соединен с выходом задатчика скорости нестабилизированного наведения, выход устройства управления арретиром соединен со вторым управляющим входом ключа.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления трехфазным инвертором | 1982 |
|
SU1107248A1 |
| DE 3409538 C1, 22.08.85 | |||
| EP 0229864 A1, 29.07.87 | |||
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ВЫБОРА ДЕКОДЕРА В СИСТЕМАХ СВЯЗИ | 2005 |
|
RU2480932C2 |

