Изобретение относится к гироскопической технике, а именно к одноосным гироскопическим стабилизаторам, и предназначено для применения в автоматических системах стабилизации и управления.
В литературе описаны гироскопические устройства как одноосные гироскопические стабилизаторы, предназначенные для измерения отклонения стабилизируемого объекта от заданного направления в пространстве [1].
Указанные приборы не удовлетворяют требованиям, предъявляемым к стабилизаторам для наземной техники вследствие специфики действующих на движущийся объект техники возмущающих моментов, механических, угловых и т.п. колебаний, и как следствие не могут быть использованы в указанных объектах.
Гироскопические устройства в автоматических системах стабилизации и управления для наземной техники, работающие одновременно в режиме стабилизации (компенсации качки), поиска объекта и слежения за ним (режим дистанционного управления) при значительных возмущающих моментах, вызванных движением объекта наземной техники, должны выполнять следующие задачи:
- создавать в пространстве стабилизированное опорное направление, независимое от возмущающих моментов и разворотов движущегося объекта наземной техники;
- измерять угловые рассогласования объекта от заданного стабилизированного направления;
- выполнять дистанционные команды оператора по изменению углового положения стабилизированного направления для осуществления режима дистанционного управления со стабилизированными скоростями управления от 0,001 до 30o/с и углах обзора по азимуту - круговое, по углу места - до 20o.
Наиболее близким по технической сущности к заявляемому гироскопическому устройству является серийно изготавливаемое на ОАО "КЭМЗ" для наземных объектов техники гироскопическое устройство (гироскопический датчик угла) БС2.369.033 (см. фиг.1), взятое за прототип, содержащее ротор 1 гиромотора, установленный в подшипниках внутренней рамки 2 карданова подвеса. Внутренняя рамка 2 вместе с ротором гироскопа поворачивается в подшипниках оси наружной рамки 3 карданового подвеса, которая свободно вращается в подшипниках, закрепленных в корпусе 4. Отклонение наружной рамки 3 карданова подвеса относительно стабилизируемого направления фиксируется с помощью датчика угла рассогласования 5. Поворотный электромагнит наведения 6 обеспечивает выполнение дистанционных команд оператора по изменению углового положения стабилизированного направления. В гироскопическом устройстве используется система релейной межрамочной коррекции с зоной нечувствительности 7.
Система межрамочной коррекции 7 (далее МРК) рассматриваемого гироскопического устройства содержит датчик углового положения 8 внутренней рамки 2 карданового подвеса, в качестве которого используются две фотопары (оптические системы), состоящие из двух светодиодов 9, 10 (источников излучения), двух фотодиодов 11, 12 (оптических датчиков), расположенных на наружной рамке 3 карданового подвеса и шторки 13, соединенной с осью внутренней рамки 2 карданового подвеса, усилительно-коммутационное устройство 14 и исполнительный поворотный электромагнит коррекции 15, расположенный на оси наружной рамки 3 карданового подвеса.
Усилительно-коммутационное устройство 14 реализовано на последовательно соединенных компараторах 16, 17 и усилителях мощности 18, 19 соответственно, причем выходы усилителей мощности 18, 19 соединены с обмотками поворотного электромагнита коррекции 15, а входы компараторов 16, 17 соединены с выходами фотодиодов 11, 12 датчика углового положения 8 внутренней рамки 2.
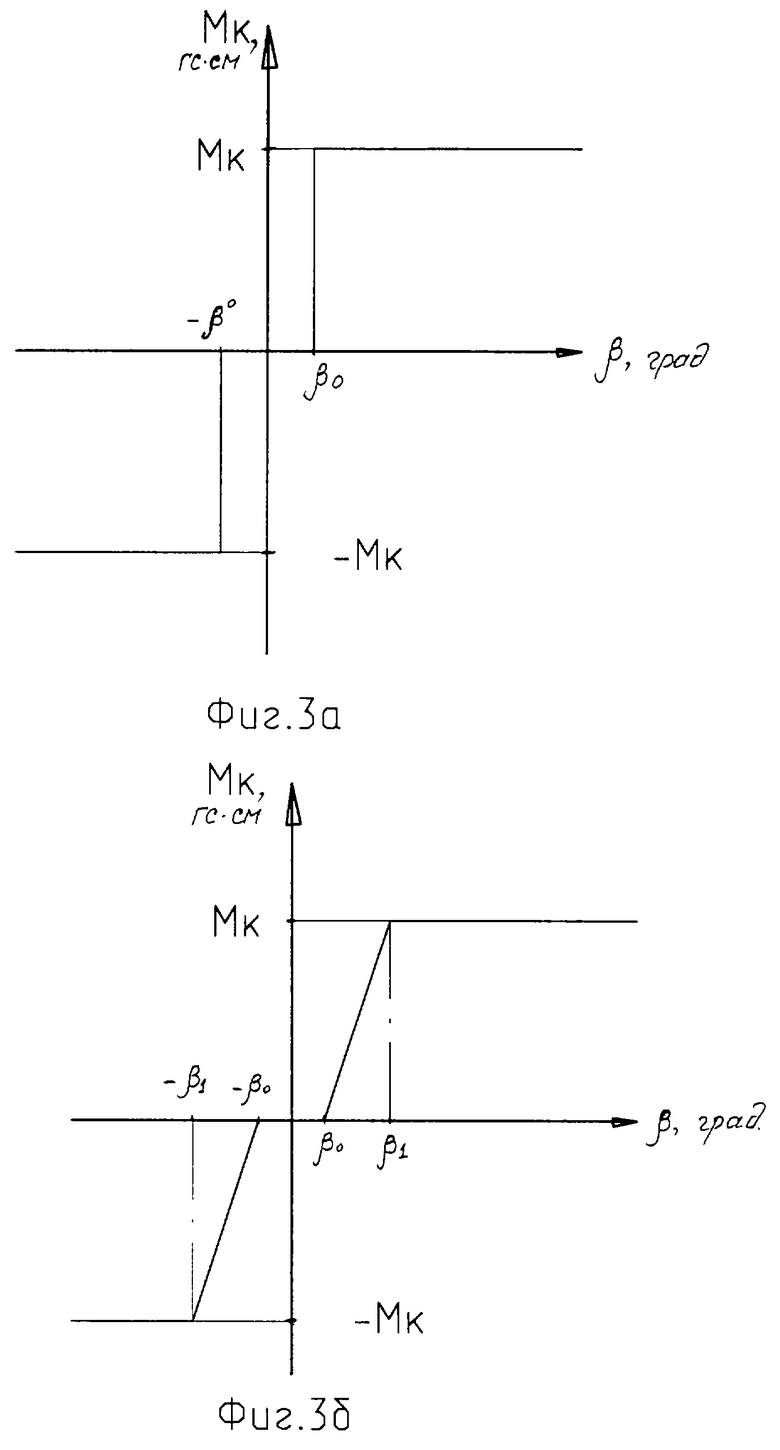
В нулевом положении гироскопа, которое характеризуется взаимной перпендикулярностью внутренней 2 и наружной рамок 3 карданова подвеса, шторка 13 находится в положении, при котором исключается освещенность фотодиодов 11, 12 излучением от светодиодов 9, 10. При отклонении внутренней рамки 2 от перпендикулярного положения на угол, превышающий зону нечувствительности системы МРК 7, отклоняется жестко связанная с внутренней рамкой 3 шторка 13, при этом излучением соответствующего светодиода, например 9, обеспечивается освещенность соответствующего фотодиода 11. При достижении величины сигнала с фотодиода 11, равного порогу срабатывания компаратора 16, последний срабатывает и сигнал через усилитель мощности 18 поступает на одну из управляющих обмоток поворотного электромагнита коррекции 15. Поворотный электромагнит коррекции 15 создает корректирующий момент по оси наружной рамки 3, под действием которого внутренняя рамка 2 будет прецессировать в исходное положение. Таким образом, в прототипе реализуется релейная характеристика системы МРК 7 с зоной нечувствительности, для которой зависимость момента коррекции от угла поворота внутренней рамки 2 будет иметь вид, представленный на фиг.3а:
где - диапазон угла поворота внутренней рамки от 0 до β0 определяет зону нечувствительности коррекции;
- диапазон более β0 определяет зону постоянного момента коррекции МК.
Недостатком существующей конструкции гироскопического устройства является существенная величина погрешности от срабатывания межрамочной коррекции с релейной характеристикой, которая возникает под действием импульсного (постоянного по величине) приложения момента коррекции, как динамическая погрешность из-за угловой просадки гироскопа, и определяется по формуле (1):
где МK - момент коррекции, гс•см;
JВ - момент инерции внутренней рамки, гс•см•с2;
Н - кинетический момент гиромотора, гс•см•с.
Применительно к прототипу:
МK=800 гс•см;
JВ=2 гс•см•с2;
Н=4000 гс•см•с;
Δα=0,1 мрад.
Как следует из формулы (1), снижение указанной погрешности в существующей конструкции гироскопического устройства при постоянных значениях момента инерции внутренней рамки 2 и кинетического момента возможно только путем снижения величины момента коррекции.
Минимально необходимая величина момента или скорости коррекции определяется не скоростью ухода гироскопа, а спецификой работы гироскопического устройства в стабилизаторах наземной техники в режиме наведения объекта стабилизации. Наведение осуществляется путем наложения с помощью поворотного электромагнита наведения 6 момента по оси внутренней рамки 2 и прецессии гироскопа вокруг оси наружной рамки 3. При оптимальном размещении гиродатчика горизонтального наведения на объекте стабилизации, как показано на фиг. 1,a, и при наличии угла возвышения γ отработка наводочной скорости прецессии гироскопа  будет производиться приводом вращения основания, на котором расположен объект стабилизации, со скоростью
будет производиться приводом вращения основания, на котором расположен объект стабилизации, со скоростью  перпендикулярной плоскости погона основания и расположенной к вектору
перпендикулярной плоскости погона основания и расположенной к вектору  под углом возвышения объекта стабилизации γ, то есть проекция скорости
под углом возвышения объекта стабилизации γ, то есть проекция скорости  на ось внутренней рамки 2 будет равна
на ось внутренней рамки 2 будет равна 
С этой составляющей наружная рамка 3 будет обкатываться вокруг оси внутренней рамки 2. Система МРК 7 должна отрабатывать эту скорость. В противном случае, вследствие кажущегося завала внутренней рамки 2 она может завалиться до упора, что выбьет гироскоп из стабилизированного положения. Таким образом, скорость системы МРК 7 гироскопического устройства должна отвечать условию:
Например, для прототипа при: γ = 15°;
γ = 15°;
Н=4000 гс•см•с
необходимо соблюдение условия: ;
;
МК>564 гс•см.
Возникшее противоречие, состоящее в том, что для нормального функционирования гироскопического устройства в режиме наведения с максимальной скоростью необходима большая скорость коррекции, а для уменьшения погрешностей желательно эту скорость уменьшить. Данное противоречие было частично решено в прототипе переходом на автоматически переключаемую двухрежимную релейную коррекцию. В цепь поворотного электромагнита коррекции 15 поставлено добавочное сопротивление 20, которое в режиме стабилизации и малых наводочных скоростей снижает скорость коррекции до 2 град/с. Этой скорости достаточно для парирования инструментального ухода гироскопа вокруг оси внутренней рамки 2 и для отработки минимальной наводочной скорости по горизонту. При перебросочной (максимальной) скорости наведения срабатывает реле 21, подключенное своей обмоткой параллельно обмотке поворотного электромагнита наведения 6 и своими контактами 22 шунтирует добавочное сопротивление 20, обеспечивая необходимую в этом случае большую скорость коррекции до 10 град/с.
Данное техническое решение позволило частично решить отмеченную проблему, снизив отмеченную выше погрешность. Дальнейшее снижение момента коррекции, а следовательно, и погрешности от угловой просадке гироскопа при релейном (импульсном) приложении момента коррекции, в существующей конструкции с чисто релейной характеристикой коррекции возможно только путем снижения диапазона минимальной наводочной скорости, что ухудшает эксплуатационные характеристики устройства.
Целью заявляемого технического решения является исключение погрешности гироскопического устройства от угловой просадки гироскопа при срабатывании системы межрамочной коррекции.
Указанная цель достигается тем, что в гироскопическое устройство, включающее подвешенный в кардановом подвесе трехстепенной астатический гироскоп с датчиком угла рассогласования, расположенным на оси наружной рамы карданового подвеса, первый поворотный электромагнит, связанный с осью внутренней рамки карданового подвеса, и систему межрамочной коррекции, состоящую из двух светодиодов и двух фотодиодов, расположенных на наружной рамке карданового подвеса, шторку, расположенную на внутренней рамке карданового подвеса, двух усилителей мощности, выходы которых соединены с обмотками второго поворотного электромагнита, связанного с осью наружной рамки карданового подвеса, согласно изобретению, дополнительно введены два широтно-импульсных модулятора, входы которых соединены с соответствующими выходами фотодиодов, а выходы - с соответствующими входами усилителей мощности.
Таким образом, за счет использования пропорционального изменения сигнала фотодиода в зависимости от площади его освещенности светодиодом и усилением этого сигнала дополнительно введенными двумя широтно-импульсными модуляторами (ШИМами) реализуется смешанная характеристика МРК, то есть с пропорциональным изменением момента коррекции при малых углах отклонения внутренней рамки (частичное освещение фотодиода) и зоной постоянного момента в случае полного освещения фотодиода светодиодом, что в результате позволяет исключить импульсное (релейное) приложение момента коррекции в начальный момент срабатывания МРК, а следовательно, исключить динамическую погрешность из-за угловой просадки гироскопа от срабатывания межрамочной коррекции.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого технического решения, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам заявляемого гироскопического устройства. Это позволяет сделать вывод о соответствии заявляемого гироскопического устройства критерию "новизна".
Сравнение заявляемого гироскопического устройства с другими техническими решениями показывает, что отдельные отличительные признаки в технике широко известны. Так, известна реализация смешанной характеристики коррекции в гировертикалях с жидкостными маятниковыми переключателями [2]. Известно использование пропорционального изменения сигнала оптического датчика от изменения величины освещенности на примере экспонометра на фототранзисторе [3] .
Однако не обнаружено применение указанных признаков в данной взаимосвязи с другими признаками для достижения вышеуказанного технического результата, следовательно, заявляемое гироскопическое устройство соответствует критерию "изобретательский уровень".
На фиг.1 - изображено гироскопическое устройство - прототип.
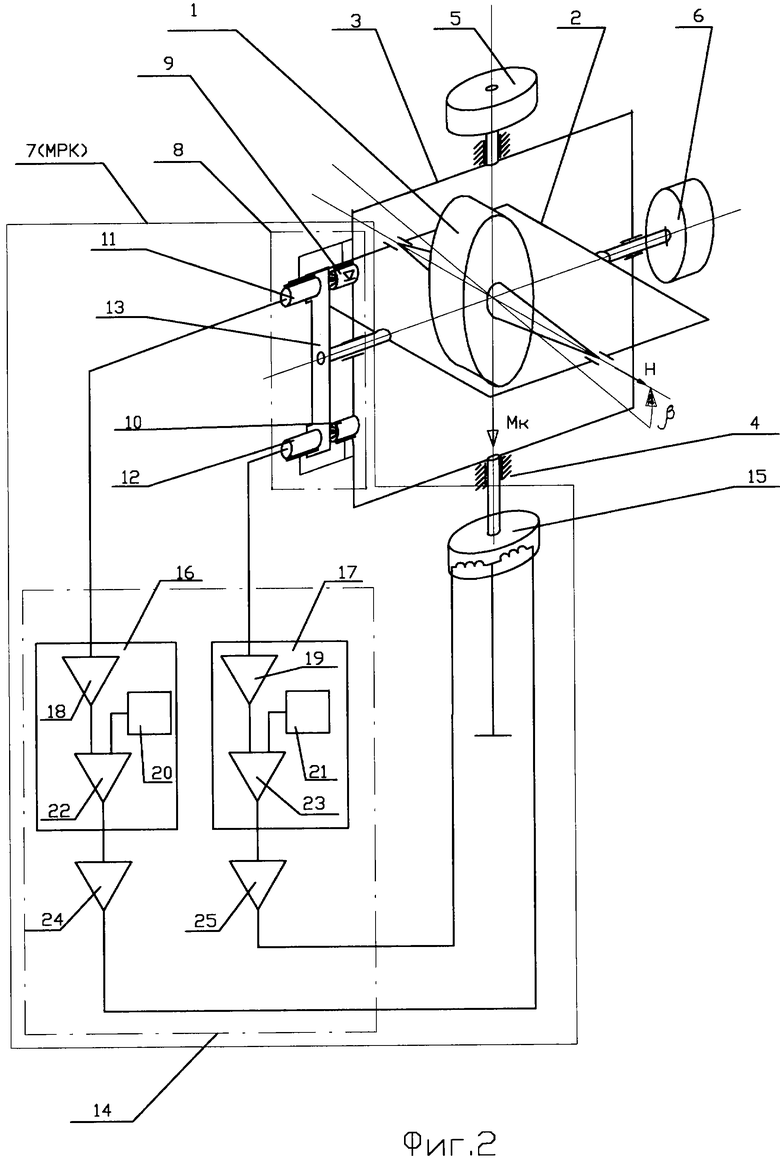
На фиг.2 - изображено заявляемое гироскопическое устройство
На фиг.3 - приведены графики.
На фиг.2 представлено заявляемое гироскопическое устройство, содержащее ротор 1 гиромотора, установленный в подшипниках внутренней рамки 2 карданова подвеса. Внутренняя рамка 2 вместе с ротором гироскопа поворачивается в подшипниках оси наружной рамки 3 карданового подвеса, которая свободно вращается в подшипниках, закрепленных в корпусе 4. Отклонение наружной рамки 3 карданова подвеса относительно стабилизируемого направления фиксируется с помощью датчика угла рассогласования 5. Поворотный электромагнит наведения 6 обеспечивает выполнение дистанционных команд оператора по изменению углового положения стабилизированного направления. В гироскопическом устройстве используется система межрамочной коррекции 7 с пропорционально-релейной (смешанной) выходной характеристикой.
Система МРК 7 заявляемого гироскопического устройства содержит датчик углового положения 8 внутренней рамки 2 карданового подвеса, состоящий из двух светодиодов 9, 10, двух фотодиодов 11, 12 расположенных на наружной рамке 3 карданового подвеса и шторки 13, соединенной с осью внутренней рамки 2 карданового подвеса, усилительно-коммутационное устройство 14 и исполнительный поворотный электромагнит коррекции 15, расположенный на оси наружной рамки 3 карданового подвеса. Усилительно-коммутационное устройство 14 реализовано на последовательно соединенных ШИМах 16, 17, в каждый из которых входят усилители 18, 19, генераторы пилообразного напряжения 20, 21 и сумматоры (компараторы) 22, 23, и последовательно соединенные усилители мощности 24, 25 соответственно, причем выходы усилителей мощности 24, 25 соединены с соответствующими обмотками поворотного электромагнита коррекции 15, а входы ШИМов 16, 17 соединены с выходами фотодиодов 11, 12 датчика углового положения 8 внутренней рамки 2.
В нулевом положении гироскопа, которое характеризуется взаимной перпендикулярностью внутренней 2 и наружной 3 рамок, шторка 13 выставляется так, чтобы исключить освещенность обоих фотодиодов 11, 12. При этом система МРК 7 не работает. При отклонении внутренней рамки 2 в какую-либо сторону, например против часовой стрелки, шторка 13 поворачивается вместе с внутренней рамкой 2, при этом поток излучения светодиода 9 обеспечивает освещенность фотодиода 11. В это же время фотодиод 12 будет затемненным. По мере увеличения угла отклонения внутренней рамки 2 вместе со шторкой 13 будет увеличиваться площадь освещенности фотодиода 11 и, следовательно, будет увеличиваться сигнал с фотодиода 11, который будет изменяться пропорционально увеличению площади его освещенности, которая в свою очередь увеличивается по мере увеличения угла отклонения внутренней рамки 2 гироскопического устройства до того момента, когда шторка 13 не будет изменять площадь освещенности участка фотодиода 11. Линейно изменяющийся сигнал фотодиода 11 поступает на вход ШИМа 16 и далее на один из входов компаратора 22, в котором он суммируется с сигналом генератора пилообразного напряжения 20, поступающего на другой вход компаратора 22, и преобразуется в импульсное напряжение, длительность импульсов которого пропорциональна величине сигнала фотодиода 11. С выхода ШИМа 16 управляющий сигнал поступает через усилитель мощности 24 на одну из управляющих обмоток поворотного электромагнита коррекции 15, который создает корректирующий момент относительно оси наружной рамки 3, обеспечивая прецессию внутренней рамки 2 в нулевое положение. При этом величина момента коррекции будет пропорциональна углу отклонения внутренней рамки 2, который в свою очередь будет пропорционален скорости отклонения внутренней рамки 2, определяемой величиной возмущающих моментов по оси наружной рамки 3 или составляющей переносной скорости.
Аналогично работает система МРК 7 и при отклонении внутренней рамки 2 по часовой стрелке, при этом сигнал с фотодиода 12 поступает на вход ШИМа 17 и с его выхода преобразованный сигнал через усилитель мощности 25 поступает на соответствующую обмотку электромагнита коррекции 15.
Таким образом в заявляемом гироскопическом устройстве реализуется смешанная характеристика МРК, для которой зависимость момента коррекции от угла поворота внутренней рамки будет иметь вид, представленный на фиг.3б.
где - диапазон поворота внутренней рамки от 0 до β0 определяет зону нечувствительности коррекции;
- диапазон от β0 до β1 определяет зону пропорционального изменения момента коррекции от угла поворота внутренней рамки;
- диапазон от β1 и более определяет зону постоянно действующего момента коррекции МК.
Как отмечалось выше, погрешность от динамической просадки гироскопа определяется величиной момента коррекции в первый момент его воздействия, то есть в первый момент срабатывания коррекции.
В заявляемом гироскопическом устройстве работа системы МРК 7 начинается воздействием момента коррекции малой величины (близкой к нулю), и этот момент непрерывно увеличивается по мере отклонения внутренней рамки. И так как первичное воздействие момента коррекции в заявляемом устройстве происходит моментом, близким к нулю, то и погрешность от динамической просадки гироскопа будет практически нулевой.
Пропорциональный участок характеристики МРК 7, определяющий пропорциональное изменение момента коррекции от угла поворота внутренней рамки, обеспечивается за счет использования режима пропорционального нарастания сигнала фотодиода от постепенного увеличения площади освещенности его светодиодом и усиления этого сигнала дополнительно введенными широтно-импульсными модуляторами (ШИМами).
Опытный образец заявляемого гироскопического устройства прошел комплекс испытаний, результаты испытаний положительные.
Источники информации:
1. Д. С. Пельпор "Теория гироскопических стабилизаторов". М., Машиностроение, 1965 г., стр. 129-134, с. 149-150)
2. Г.О.Фридлендер, М.С.Козлов "Авиационные гироскопические приборы" М., 1961, с.46, 148).
3. "Сопряжение датчиков и устройств ввода данных с компьютерами IBM PC" под ред. У.Томпкинса и Дж.Уэбстера, пер. с англ. Ю.А.Кузьмина и В.М.Матвеева. М., Мир, 1992 г. с. 352).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1970 |
|
SU282223A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2003 |
|
RU2239788C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
Изобретение относится к гироскопической технике, а именно к одноосным гироскопическим стабилизаторам, и предназначено для применение в автоматических системах стабилизации и управления. В гироскопическое устройство, включающее подвешенный в кардановом подвесе трехстепенной астатический гироскоп с датчиком угла рассогласования, расположенным на оси наружной рамы карданового подвеса, два поворотных электромагнита, первый из которых связан с осью внутренней рамки карданового подвеса, и систему межрамочной коррекции, состоящую из двух светодиодов и двух фотодиодов, расположенных на наружной рамке карданового подвеса, шторку, расположенную на внутренней рамке карданового подвеса, два усилителя мощности, выходы которых соединены с обмотками второго поворотного электромагнита, связанного с осью наружной рамки карданового подвеса, дополнительно введены два широтно-импульсных модулятора, входы которых соединены с соответствующими выходами фотодиодов, а выходы - с соответствующими входами усилителей мощности. Техническим результатом является исключение погрешности гироскопического устройства от угловой просадки гироскопа при срабатывании системы межрамочной коррекции. 3 ил.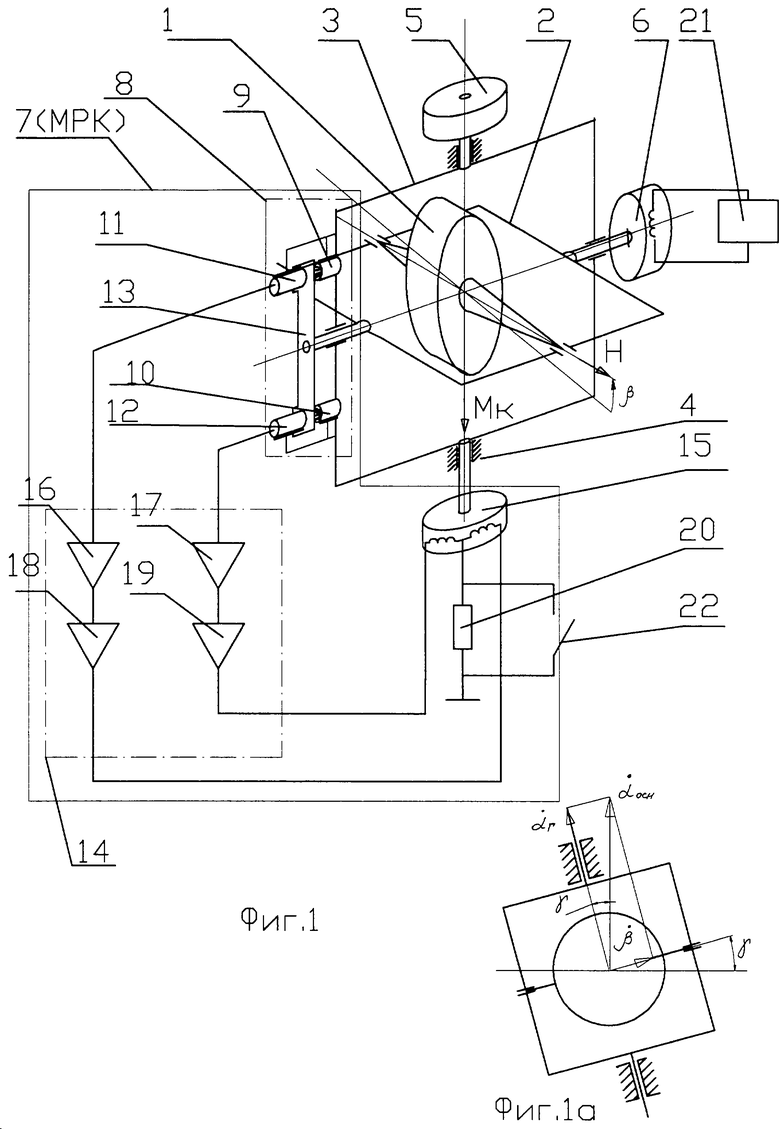
Гироскопическое устройство, включающее подвешенный в кардановом подвесе трехстепенной астатический гироскоп с датчиком угла рассогласования, расположенным на оси наружной рамы карданового подвеса, первый поворотный электромагнит, связанный с осью внутренней рамки карданового подвеса, и систему межрамочной коррекции, состоящую из двух светодиодов и двух фотодиодов, расположенных на наружной рамке карданового подвеса, шторку, расположенную на внутренней рамке карданового подвеса, двух усилителей мощности, выходы которых соединены с обмотками второго поворотного электромагнита, связанного с осью наружной рамки карданового подвеса, отличающееся тем, что в него дополнительно введены два широтно-импульсных модулятора, входы которых соединены с соответствующими выходами фотодиодов, а выходы - с соответствующими входами усилителей мощности.
| RU 99124041 А1, 27.11.2001 | |||
| RU 20281 U1, 27.10.2001 | |||
| ПЕЛЬПОР Д.С | |||
| Теория гироскопических стабилизаторов | |||
| -М.: Машиностроение, 1965, с.129-134, 149-150 | |||
| СПОСОБ КОРРЕКЦИИ ПЕРПЕНДИКУЛЯРНОСТИ ОСИ РОТОРА ГИРОСКОПА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2175113C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1996 |
|
RU2104578C1 |
| US 5433123 А, 18.07.1995 | |||
| Способ получения металлического марганца анодным растворением высокофосфористого ферромарганца | 1974 |
|
SU521757A1 |

