Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам танкового вооружения, и может быть использовано для стабилизации скорости вращения двигателя постоянного тока.
Известны приводы стабилизации и наведения танкового вооружения, в состав которых входит электромашинный усилитель (ЭМУ). Наиболее близким аналогом, который может быть принят за прототип, является привод наведения и стабилизации 2Э42-2 (1), содержащий источник питания, блок управления приводом, электромашинный усилитель, двигатель постоянного тока, блок датчиков и вспомогательного электрооборудования.
Недостатками указанного привода стабилизации и наведения, выбранного в качестве прототипа, являются:
1) низкий КПД привода, который определяется электромашинным усилителем, при номинальной нагрузке он не превышает 50%;
2) большой ток потребления в режиме холостого хода (сигнал управления равен нулю);
3) отсутствует возможность увеличения максимальной скорости исполнительного двигателя, что ограничивает функциональные возможности всего привода;
4) большая масса электромашинного усилителя, составляющая более 60 кг, что ухудшает эксплуатационные характеристики стабилизатора.
Технической задачей заявляемого изобретения является расширение функциональных возможностей за счет повышения КПД привода и снижения тока холостого хода и улучшение эксплуатационных характеристик стабилизатора за счет уменьшения массы, а также снижение стоимости модернизации привода за счет обеспечения полной взаимозаменяемости с электромашинным усилителем вводимого в стабилизатор устройства управления двигателем постоянного тока.
Указанный технический результат достигается тем, что в привод стабилизации и наведения, содержащий источник питания, блок управления стабилизатором (БУС), двигатель постоянного тока, блок датчиков и вспомогательного электрооборудования (БДиВЭ), согласно изобретению вместо электромашинного усилителя введен электронный статический преобразователь (ЭСП), первый и второй входы электронного статического преобразователя соединены с клеммами источника питания, третий, четвертый и пятый входы соединены с первым, вторым и третьим выходами блока управления стабилизатором (БУС), первый и второй выходы электронного статического преобразователя соединены с первым и вторым выводами двигателя постоянного тока и первым и вторым входами БУС, третий выход электронного статического преобразователя соединен с третьим входом БУС, четвертый вход блока управления (БУС) соединен с первым выходом блока датчиков и вспомогательного электрооборудования (БДиВЭ), а четвертый выход блока управления (БУС) с первым входом блока датчиков и вспомогательного электрооборудования (БДиВЭ), при этом корпус электронного статического преобразователя выполнен цилиндрическим и состоит из двух металлических оснований, одна из сторон которых снабжена ребрами, основания скреплены между собой ребрами внутрь, на противоположных концах одного основания между ребрами установлены вентиляторы, на другой стороне оснований размещены силовые приборы электронного статического преобразователя, а снаружи основания герметично закрыты полуцилиндрическими крышками.
Применение в приводе стабилизации и наведения электронного статического преобразователя вместо электромашинного усилителя и размещение его в заявляемом корпусе решает задачи:
1) снижения тока холостого хода и повышение КПД, так как ток потребления ЭМУ определяется параметрами встроенного двигателя и КПД не превышает 50% в номинальном режиме, в то время как КПД ЭСП определяется схемным построением и элементной базой конвертора и инвертора и составляет более 80%;
2) максимальная угловая скорость вращения исполнительного двигателя, а значит скоростные параметры привода, определяются максимальным выходным напряжением ЭМУ (скоростью вращения встроенного двигателя и конструкцией генератора), то есть не могут быть изменены, а выходное напряжение ЭСП определяется коэффициентом трансформации трансформатора конвертора и может быть изменено в соответствии с требованиями к приводу;
3) масса ЭМУ составляет более 60 кг, масса ЭСП - менее 30 кг, что улучшает эксплуатационные характеристики привода;
4) Так как габаритные размеры ЭСП и электрическая схема соединения с другими блоками стабилизатора полностью соответствуют габаритам и схеме соединения ЭМУ, то повышение характеристик всего привода достигается заменой всего одного прибора (ЭМУ), что позволяет проводить модернизацию систем наведения и стабилизации с минимальными затратами.
На фиг.1 изображена схема привода стабилизации и наведения, на фиг.2 - схема ЭСП, на фиг.3 - конструкция ЭСП, на фиг.4 - общий вид корпуса ЭСП.
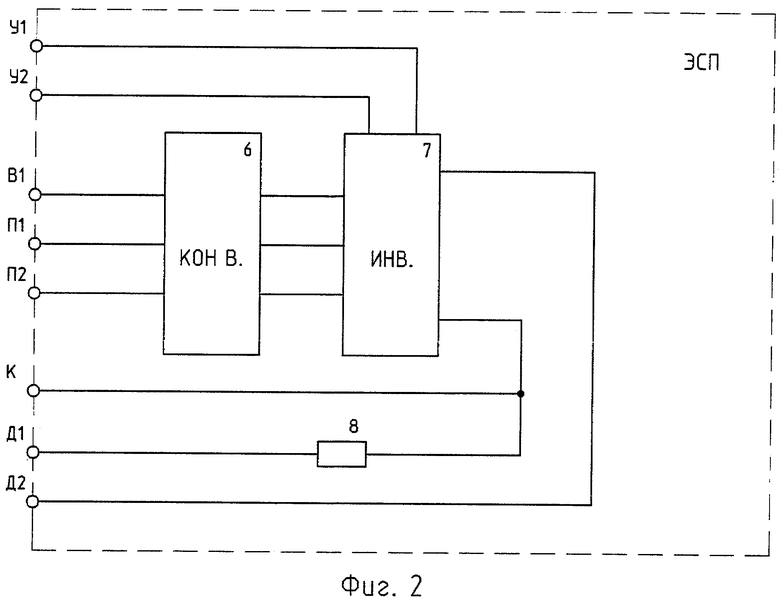
Привод стабилизации и наведения фиг.1 содержит источник питания 1, который выводами плюс и минус соединен с выводами источника питания электронного статического преобразователя (ЭСП) 2, блока управления стабилизатором (БУС)З и блока датчиков и вспомогательного электрооборудования (БДиВЭ) 4, первый и второй выходы (ЭСП) 2 соединены с выводами двигателя постоянного тока 5 и первым и вторым входами (БУС) 3, третий выход (ЭСП) 2 соединен с третьим входом (БУС) 3, первый, второй и третий выходы блока управления (БУС) 3 соединены с первым, вторым и третьим входами (ЭСП) 2, четвертый выход (БУС) 3 соединен со входом (БДиВЭ) 4, выход которого соединен с четвертым входом (БУС) 3.
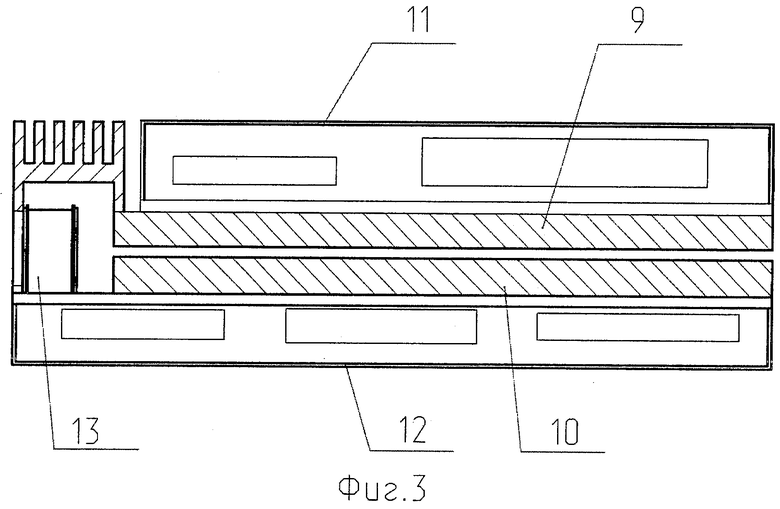
Электронный статический преобразователь (ЭСП) фиг.2 содержит конвертор 6 на входы питания которого через клеммы (П1) и (П2) подается плюс и минус с источника питания 1, а на третий вход конвертора 6 через клемму (В1) подается сигнал включения ЭСП. Три выхода конвертора соединены с тремя входами источника питания инвертора 7, на два входа управления которого поступают сигналы управления с клемм(У1) и (У2).
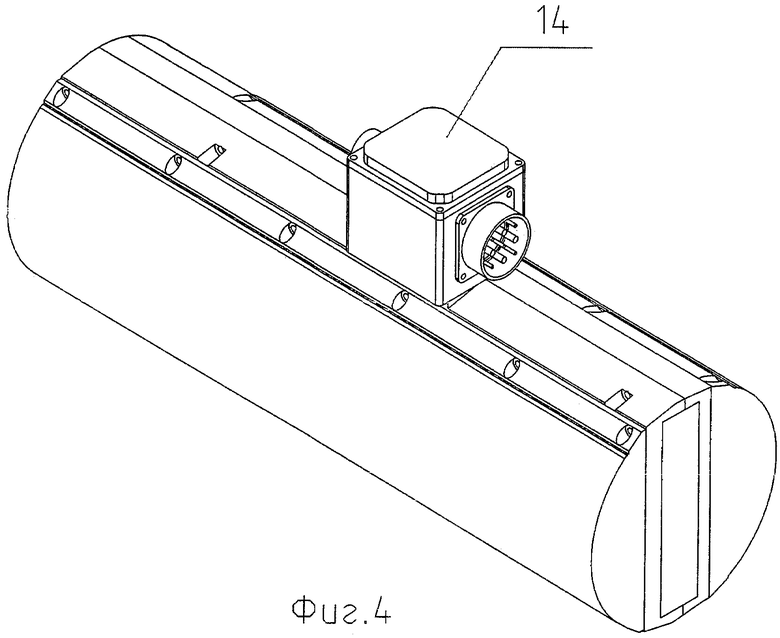
Первый выход инвертора 7 соединен с клеммой (Д1) ЭСП, второй выход инвертора 7 соединен с первым выводом датчика тока 8, второй вывод которого соединен с клеммой (Д2). Второй выход инвертора соединен также с клеммой (К) ЭСП. Конструкция корпуса ЭСП фиг.3 включает два основания 9 и 10, две крышки 11 и 12, вентиляторы 13 и клеммную коробку с установленными разъемами 14 (фиг.4).
Типовая схема системы стабилизации и наведения, включающая блок управления стабилизатором (БУС) и блок датчиков и вспомогательного электрооборудования (БДиВЭ); используемые в заявляемом изобретении, описаны в книге В.В.Корнеева, М.И.Кузнецова и др. под редакцией профессора В.В.Корнеева «Основы автоматики и танковые автоматические системы», М., Министерство обороны, 1976 г., на стр.148-150 (датчик скорости), 154-157 (датчик линейных ускорений и датчик угла), 347-348 (функциональная схема) и 430-434 (БУС).
Привод стабилизации и наведения работает следующим образом:
при подаче сигнала включения на клемму (В1) ЭСП с блока управления стабилизатором на выходе конвертора 6 формируется двухполярное напряжение, величина которого определяет максимальную скорость вращения исполнительного двигателя постоянного тока 5.
В состав конвертора входят схемы стабилизации и защиты от перегрузки по току и схема защиты по напряжению.
На два управляющих входа инвертора 7 через клеммы (У1) и (У2) с выходов блока управления БУС поступают импульсные сигналы, которые формируются в соответствии с величиной задающего сигнала и сигналов с блока БДиВЭ, при этом на выходе инвертора 7 формируется импульсное напряжение, которое через датчик тока 8 и клеммы Д1 и Д2 поступает на двигатель 5.
В инвертор 7 входит схема широтно-импульсной модуляции и стабилизации тока а также схема защиты от короткого замыкания в цепи двигателя.
В соответствии с импульсным сигналом управления на входе инвертора обеспечиваются режимы разгона, торможения и реверса двигателя, при этом энергия торможения двигателя рекуперируется в источник питания 1. Датчик тока 8, выполненный, например, в виде резистивного шунта, служит для формирования сигнала обратной связи по току, который поступает на вход БУС.
Сопротивление шунта соответствует сопротивлению компенсационной обмотки ЭМУ с целью обеспечения взаимозаменяемости с ЭСП.
Сигнал обратной связи по напряжению поступает на вход БУС с клеммы (Д1) и соответствует по величине сигналу с поперечной обмотки ЭМУ.
Через клемму (К) ЭСП гальванически изолированный выход инвертора 7 соединен с общей точкой БУС 3. С целью снижения перегрева силовые элементы конвертора 6 и инвертора 7 равномерно распределены по двум основаниям ЭСП, при этом силовые элементы, имеющие наибольшую рабочую температуру, установлены непосредственно в зоне обдува вентиляторов.
Технический результат заявляемого устройства подтвержден испытаниями опытного образца.
Источники информации
1. Книга В.В.Корнеева, М.И.Кузнецова и др. под редакцией профессора В.В.Корнеева «Основы автоматики и танковые автоматические системы», М., Министерство обороны, 1976 г.
2. «Стабилизатор 2Э42. Техническое описание», архив ОАО «СКБ ПА», стр.18-27.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСОВЕРШЕНСТВОВАННЫЙ ТАНКОВЫЙ СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2010 |
|
RU2429440C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2006 |
|
RU2343393C2 |
| ПРИВОД ГОРИЗОНТАЛЬНОГО НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ | 2013 |
|
RU2540448C2 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2526292C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| Стабилизированный двухступенчатый конвертор | 1979 |
|
SU862133A1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ ПРИВЯЗНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2815590C1 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА | 2018 |
|
RU2714022C2 |
Изобретение относится к стабилизаторам танкового вооружения и может быть использовано для стабилизации скорости вращения двигателя постоянного тока. Технический результат - расширение функциональных возможностей за счет повышения КПД привода, снижения тока холостого хода и улучшение эксплуатационных характеристик стабилизатора за счет уменьшения массы, а также снижение стоимости модернизации привода за счет обеспечения полной взаимозаменяемости с электромашинным усилителем вводимого в стабилизатор устройства управления двигателем постоянного тока. Привод содержит источник питания, блок управления стабилизатором, двигатель постоянного тока, блок датчиков и вспомогательного электрооборудования, электронный статический преобразователь. При этом корпус электронного статического преобразователя выполнен цилиндрическим и состоит из двух металлических оснований, одна из сторон которых снабжена ребрами. Основания скреплены между собой ребрами внутрь, на противоположных концах одного основания между ребрами установлены вентиляторы, на другой стороне оснований размещены силовые приборы электронного статического преобразователя, а снаружи основания герметично закрыты полуцилиндрическими крышками. 1 з.п. ф-лы, 4 ил.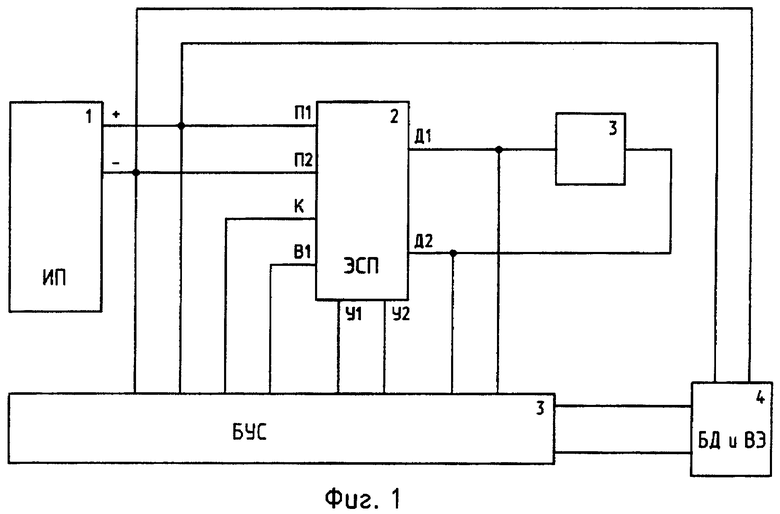
1. Привод стабилизации и наведения танкового вооружения, содержащий источник питания, блок управления стабилизатором (БУС), двигатель постоянного тока, блок датчиков и вспомогательного электрооборудования (БДиВЭ), отличающийся тем, что он снабжен электронным статическим преобразователем (ЭСП), первый и второй входы которого соединены с клеммами источника питания, третий, четвертый и пятый входы соединены с первым, вторым и третьим выходами БУС, первый и второй выходы соединены с первым и вторым выводами двигателя постоянного тока и первым и вторым входами БУС, третий выход соединен с третьим входом БУС, при этом четвертый вход БУС соединен с первым выходом БДиВЭ, а четвертый выход БУС соединен с первым входом БДиВЭ.
2. Привод по п.1, отличающийся тем, что корпус электронного статического преобразователя выполнен цилиндрическим с двумя металлическими основаниями, одна из сторон которых снабжена ребрами, при этом основания скреплены между собой ребрами внутрь и на противоположных концах одного основания между ребрами установлены вентиляторы, на другой стороне оснований размещены силовые приборы электронного статического преобразователя, а снаружи основания герметично закрыты полуцилиндрическими крышками.
| КОРНЕЕВ В.В | |||
| Основы автоматики и танковые автоматические системы | |||
| - М.: Министерство обороны, 1976, с.148-150, 154-157, 347, 348, 430-434 | |||
| Танк "Урал", техническое описание и инструкция по эксплуатации | |||
| Книга первая | |||
| - М.: Воениздат Минобороны СССР, 1975, с.197-202 | |||
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 1993 |
|
RU2118783C1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 1998 |
|
RU2138758C1 |
| СПОСОБ ОСВОЕНИЯ СКВАЖИНЫ | 1998 |
|
RU2127805C1 |
| КОМПОЗИЦИЯ И СПОСОБ С ИСПОЛЬЗОВАНИЕМ СТАБИЛИЗИРОВАННОГО ЧУВСТВИТЕЛЬНОГО ИНГРЕДИЕНТА | 2008 |
|
RU2466741C2 |

