Изобретение относится к области машиностроительной гидравлики, в частности к системам управления технологическим оборудованием самоходного транспорта для раздачи анодной массы и других компонентов при электролизном производстве алюминия. Данная система управления также может использоваться для раздачи сыпучих материалов в других отраслях машиностроения.
Известна система управления технологическим оборудованием машины для загрузки анодной массы ОАО "Братский алюминиевый завод " (см. 1029-07-00-00-00 СГ Схема гидравлическая принципиальная МЗАМ), содержащая насос переменной производительности с регулятором постоянной мощности, два шестеренных насоса, два релейных гидрораспределителя, гидравлический блок, состоящий из трех релейных гидрораспределителей и регулятор потока.
Известна также система управления технологическим оборудованием машины для загрузки анодной массы, разработанная в ОАО "Красноярский завод комбайнов" (см. МЗАМ 09.12.00.00.000 ГЗ Машина для загрузки анодной массы), содержащая пульт управления, насос переменной производительности с регулятором постоянной мощности, насос постоянной производительности, два гидравлических блока, состоящие из релейных гидрораспределителей с электроуправлением, редукционных клапанов, дросселей и регуляторов потока. Следует отметить, что в данной системе управления скорость и плавность перемещения гидроцилиндров исполнительных органов обеспечивается настройкой редукционных клапанов и дросселей, а независимость скорости вращения гидромоторов приводов при изменении нагрузки - регуляторами потока.
Недостатком данных систем управления являются низкие плавность и точность регулирования гидроцилиндрами приводов шнеков и метателя.
Близкой по технической сущности к заявляемой электрогидравлической системе управления технологическим оборудованием машины для загрузки анодной массы является система управления, разработанная ОАО "Красноярский комбайновый завод". Система управления содержит насос переменной производительности с регулятором постоянной мощности, выход которого непосредственно подключен к входным каналам релейных гидрораспределителей, выходы которых подключены к входам гидромоторов привода метателя и наклонного шнека, причем в сливных магистралях гидромоторов установлены регуляторы потока. Кроме того, выход насоса переменной производительности через редукционные клапаны подключен к входным каналам релейных распределителей, выходы которых через дроссели подключены к гидроцилиндрам управления технологического оборудования. Насос постоянной производительности подключен к входным каналам релейного гидрораспределителя, выходы которого подключены к магистралям гидромотора горизонтального шнека, причем в сливной магистрали гидромотора установлен регулятор потока. Управляющие входы релейных распределителей подключены к выходам пульта управления.
Разгрузка насоса переменной производительности осуществляется с помощью релейного распределителя, обеспечивающего, при отсутствии сигнала на его управляющих входах, подключение выхода насоса к сливной магистрали системы.
Управление технологическими приводами машины для загрузки анодной массы производится оператором путем последовательной подачи команд с пульта управления на управляющие входы релейных распределителей.
Недостатком этой системы является то, что для управления приводами применены релейные распределители, в результате чего для обеспечения плавности регулирования гидроцилиндрами в систему введены дроссели и редукционные клапаны, что привело к усложнению схемы и к ее функциональной ограниченности, т. к. применение указанной системы в других условиях (нагрузки, требования к скоростям и т.п.) потребует перенастройки как редукционных клапанов, так и дросселей. Применение релейных распределителей в приводах вращения шнеков исключает возможность изменения частоты вращения шнеков и тем сам точно дозировать подачу анодной массы.
Другим недостатком является наличие больших гидравлических потерь, вызванных тем, что необходимое давление для каждого привода создается редукционным клапаном, а насос работает в режиме ограничения максимальной мощности. Это в свою очередь приводит к дополнительному нагреву рабочей жидкости.
Недостатком является и отсутствие автоматического управления процессом включения и выключения гидромоторов шнеков, что влечет повышение требований к обслуживающему персоналу.
Таким образом, данная система не обладает достаточной плавностью и пропорциональностью управления приводами, а следовательно, не обеспечивает равномерную и дозированную подачу анодной массы, имеет большие энергетические потери и функциональную ограниченность.
Наиболее близкой по технической сущности к заявляемой электрогидравлической системе управления технологическим оборудованием машины для загрузки анодной массы является выбранная в качестве прототипа электрогидравлическая система управления по патенту RU 2162551, F 15 B 9/04 (по первому варианту), разработанная ОАО "СКБ ПА". Электрогидравлическая система управления состоит из пульта управления, включающего в себя элемент управления, кинематически связанный с датчиками положения, преобразующими перемещение в электрический сигнал, и блока кнопочных переключателей, распределителя, состоящего из распределительных секций с пропорциональным управлением, и распределительных секций с дискретным управлением, причем каждая распределительная секция связана с одним гидродвигателем (не показан), насоса переменной производительности, электрогидравлического регулятора насоса.
Выход насоса соединен с напорными магистралями распределителя и датчиком давления, выход LS канала распределителя соединен с датчиком давления. Управляющие входы распределительных секций подключены к соответствующим выходам пульта управления. Кроме того, система содержит функциональный блок управления, состоящий из сумматора, первый инвертирующий вход которого подключен к выходу датчика давления насоса, второй неинвертирующий вход сумматора подключен к выходу звена ограничителя, вход которого соединен с выходом датчика давления LS канала, третий неинвертирующий вход сумматора подключен к выходу задающего элемента, а выход сумматора подключен к управляющему входу электрогидравлического регулятора насоса.
Недостатком прототипа является отсутствие автоматического управления процессом включения и выключения гидромоторов шнеков, что влечет повышение требований к обслуживающему персоналу, и не обеспечение постоянства установленной скорости вращения гидромотора горизонтального шнека.
Технической задачей, которая решается заявляемым устройством, является расширение функциональных и повышение эксплуатационных характеристик системы управления машины загрузки анодной массы в целом путем реализации логики работы системы в различных режимах и обеспечения равномерной подачи анодной массы.
При осуществлении изобретения в машине загрузки анодной массы обеспечивается точная и плавная регулировка положения наклонного шнека и метателя, плавная регулировка скорости вращения метателя и шнеков (причем скорость вращения горизонтального шнека не зависит от изменения нагрузки на его валу), а следовательно, равномерную и дозированную подачу анодной массы без нежелательного дробления и потерь.
Система обеспечивает порядок включения и выключения приводов шибера, метателя и шнеков, при котором снижаются нагрузки на механизмы машины в начале раздачи анодной массы. Кроме того, система обеспечивает работу в режиме поддержания давления на двух уровнях, в зависимости от нагрузки, что позволяет экономить энергию и уменьшить разогрев рабочей жидкости. При отсутствии управляющих сигналов (например, при загрузке анодной массы в бункер машины или ее транспортировке к электролизеру) система находится в режиме разгрузки и обеспечивает минимальные энергетические потери.
Для достижения указанного технического результата в электрогидравлической системе управления технологическим оборудованием, содержащей блок распределительных секций по числу исполнительных механизмов, пульт управления, выходы которого подключены к управляющим входам соответствующих распределительных секций, выходы которых связаны с соответствующими исполнительными механизмами, насос переменной производительности с электрогидравлическим регулятором, выход которого соединен с напорными магистралями распределительных секций, а его всасывающая полость и сливные магистрали распределительных секций соединены с баком, датчик давления и блок управления, согласно изобретению блок управления выполнен в виде формирователя сигналов управления, включающего коммутаторы по числу исполнительных механизмов, входы которых подключены к соответствующим выходам пульта управления, выход одного из них подключен к управляющему входу соответствующей распределительной секции непосредственно, выход другого связан с управляющим входом соответствующей распределительной секции через другое звено с коэффициентом передачи K1, выход третьего коммутатора через звено с коэффициентом передачи К2 подключен к первому неинвертирующему входу сумматора, второй инвертирующий вход которого соединен с выходом вновь введенного датчика скорости, а выход - с управляющим входом следующей распределительной секции, интегратора, вход которого соединен с соответствующим выходом пульта управления, а выход через компараторы подключен к управляющим входам коммутаторов, звену с переменным коэффициентом передачи, выход которого подключен к первому неинвертирующему входу сумматора, второй инвертирующий вход которого соединен с выходом датчика давления, а выход подключен к управляющему входу электрогидравлического регулятора насоса; управляющие входы звена подключены к соответствующим выходам пульта управления.
Проведенный заявителем анализ уровня, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявитель не обнаружил источник с признаками, тождественными всем существенным признакам заявляемого изобретения. Следовательно, заявляемая система соответствует критерию изобретения "новизна".
Заявлена новая совокупность существенных признаков, обеспечивающая достижение не известного из источников информации технического результата в данной области техники, что позволяет сделать вывод об изобретательском уровне заявляемой системы управления.
На чертеже представлена блок-схема заявляемой электрогидравлической системы управления, реализованная в машине для загрузки анодной массы.
Электрогидравлическая система управления технологическим оборудованием машины для загрузки анодной массы (фиг.1) состоит из пульта управления (ПУ), включающего в себя элементы управления 1 и 2, кинематически связанные с датчиками положения (ДП) 3, преобразующими перемещение в электрический сигнал, блока 4 задающих элементов и блока 5 кнопочных переключателей (КП), блока 6, состоящего из распределительных секций с пропорциональным управлением (СПУ), насоса переменной производительности 7, электрогидравлического регулятора 8 насоса и формирователя сигналов управления (ФСУ) 9. Выход насоса 7 соединен с напорными магистралями 10 блока 6 и датчиком давления 11. Управляющие входы распределительных секций СПУ1...СПУ3 подключены к соответствующим выходам пульта управления, а управляющие входы распределительных секций СПУ4...СПУ6 подключены к соответствующим выходам ФСУ 9. Выходы распределительных секций СПУ1...СПУ3 подключены соответственно к гидроцилиндрам ГЦ1. . . ГЦЗ привода наклона метателя, привода поворота метателя и привода наклона шнека, а выходы распределительных секций СПУ4...СПУ6 подключены к соответствующим гидромоторам ГМ1...ГМ3 привода метателя, привода наклонного шнека и привода горизонтального шнека, причем с валом гидромотора ГМЗ кинематически связан датчик скорости (ДС) 12. Кроме того, система содержит блок с релейным управлением (БРУ) 13, управляющий вход которого подключен к соответствующему выходу пульта управления, а выходы - к гидроцилиндру ГЦ4 привода шибера. Формирователь сигналов управления состоит из: коммутатора 14, вход которого подключен к соответствующему выходу пульта управления, а выход - к управляющему входу распределительной секции СПУ4; коммутатора 15, вход которого подключен к соответствующему выходу пульта управления, а выход через звено 16 с коэффициентом передачи K1 - к управляющему входу распределительной секции СПУ 5; коммутатора 17, вход которого подключен к соответствующему выходу пульта управления, а выход через звено 18 с коэффициентом передачи К2 - к первому неинвертирующему входу сумматора 19, второй инвертирующий вход которого соединен с выходом датчика скорости 12, а выход - с управляющим входом распределительной секции СПУ6; интегратора 20, вход которого соединен с соответствующим выходом пульта управления, а выход через компаратор 21 подключен к управляющему входу коммутатора 17, через компаратор 22 подключен к управляющему входу коммутатора 15, через компаратор 23 подключен к управляющему входу коммутатора 14; звена с переменным коэффициентом передачи 24, выход которого подключен к первому неинвертирующему входу сумматора 25, второй инвертирующий вход которого соединен с выходом датчика давления 11, а выход подключен к управляющему входу электрогидравлического регулятора 8 насоса; управляющие входы звена 24 подключены к соответствующим выходам пульта управления.
Электрогидравлическая система управления работает следующим образом. При отсутствии сигналов от пульта управления золотники распределительных секций занимают среднее (нейтральное) положение, при котором гидроцилиндры и гидромоторы отсечены от напорной и сливной магистралей гидросистемы; насос обеспечивает минимальную подачу, необходимую для формирования давления управления гидросистемы. Таким образом, при отсутствии управления технологическим оборудованием машины для загрузки анодной массы и незначительных утечках в гидросистеме энергетические потери минимальны (режим разгрузки).
Для приведения технологического оборудования в рабочее состояние сигнал с кнопочного переключателя КП2 пульта управления через звено с переменным коэффициентом передачи 24 поступает на первый неинвертирующий вход сумматора 25, с выхода сумматора сигнал подается на вход электрогидравлического регулятора 8, который преобразует электрический сигнал в перемещение люльки насоса 7, пропорциональное величине сигнала, при этом насос начинает подачу рабочей жидкости, компенсируя утечки в гидросистеме и создавая давление в напорной магистрали. Датчик давления 11 формирует электрический сигнал, пропорциональный давлению в напорной магистрали и поступающий на второй инвертирующий вход сумматора 25, при этом замыкается отрицательная обратная связь по давлению. Величина давления на выходе насоса устанавливается пропорционально величине сигнала с кнопочного переключателя КП2. Система начинает работать в режиме поддержания давления, достаточного для управления гидроцилиндрами (режим работы гидроцилиндров).
При задании одного из сигналов с датчиков положения 3 на соответствующую распределительную секцию (СПУ1...СПУ3) блока 6 золотник перемещается, подключая соответствующие входы гидроцилиндра к напорной и сливной магистралям гидросистемы и обеспечивая движение штока гидроцилиндра. При этом величина скорости движения регулируется величиной перемещения золотника (открытия секции), пропорциональной сигналу с датчика положения. Это позволяет производить точную и плавную регулировку положения наклонного шнека и метателя, что обеспечивает равномерную подачу анодной массы без нежелательного дробления и потерь.
При задании сигнала с кнопочного переключателя КПЗ на управляющий вход БРУ 13 осуществляется перемещение шибера за счет подключения напорной и сливной магистралей к соответствующим входам гидроцилиндра ГЦ4.
Управление гидромоторами метателя, горизонтального и наклонного шнеков осуществляется подачей сигнала с кнопочного переключателя КП1 на управляющие входы интегратора 20 и звена с переменным коэффициентом передачи 24, при этом на выходе интегратора формируется сигнал со временем нарастания Ти и увеличивается значение сигнала на выходе звена 24. Нарастание сигнала на выходе интегратора 20 приводит к срабатыванию через определенные промежутки времени компараторов 21. ..23, на выходе которых формируются сигналы, поступающие на управляющие входы коммутаторов 14, 15 и 17, обеспечивая замыкание их контактов. Параметры компараторов обеспечивают следующую очередность включения коммутаторов: коммутатор 14, потом коммутатор 15 и последний - коммутатор 17. При замыкании контактов коммутатора 14 сигнал с выхода соответствующего задающего элемента блока 4 поступает на управляющий вход распределительной секции СПУ4, перемещение золотника которой обеспечивает вращение гидромотора метателя со скоростью, пропорциональной величине сигнала с выхода задающего элемента. При замыкании контактов коммутатора 15 сигнал с выхода соответствующего задающего элемента блока 4 с коэффициентом K1 звена 16 поступает на управляющий вход распределительной секции СПУ5, перемещение золотника которой обеспечивает вращение гидромотора наклонного шнека со скоростью, пропорциональной величине сигнала с выхода задающего элемента. При замыкании контактов коммутатора 17 сигнал с выхода соответствующего задающего элемента блока 4 с коэффициентом К2 звена 18 поступает на первый неинвертирующий вход сумматора 19, с выхода сумматора сигнал подается на управляющий вход распределительной секции СПУ6, перемещение золотника которой обеспечивает вращение гидромотора горизонтального шнека со скоростью, пропорциональной величине сигнала с выхода задающего элемента. Датчик скорости 12 вращения горизонтального шнека формирует электрический сигнал, который поступает на второй инвертирующий вход сумматора 19, при этом замыкается отрицательная обратная связь по скорости вращения горизонтального шнека. С увеличением (уменьшением) нагрузки на горизонтальный шнек происходит уменьшение (увеличение) скорости его вращения, что приводит к уменьшению (увеличению) электрического сигнала с выхода датчика скорости, а соответственно к возрастанию (убыванию) сигнала на выходе сумматора 19, в результате чего золотник распределительной секции СПУ6 отклоняется больше (меньше), снижая (повышая) перепад давления на секции. Снижение (повышение) перепада на распределительной секции при поддержании установленного давления на выходе насоса приводит к увеличению (уменьшению) расхода рабочей жидкости, поступающей в гидромотор, и соответственно скорости вращения шнека до тех пор, пока скорость вращения не станет равной установленной. Таким образом, электрогидравлическая система обеспечивает постоянство установленной скорости вращения горизонтального шнека при изменении нагрузки на последнем, а следовательно, равномерную и дозированную подачу анодной массы. Увеличение значения сигнала на выходе звена 24 приводит к увеличению давления на выходе насоса 7, и система начинает работать в режиме поддержания давления, достаточного для обеспечения необходимой скорости вращения метателя и шнеков (режим работы гидромоторов).
При снятии сигнала кнопочного переключателя КП1 происходит уменьшение величины сигнала на выходе звена 24, давление на выходе насоса уменьшается, система переходит в режим работы гидроцилиндров, что приводит к снижению потребляемой мощности и уменьшению разогрева рабочей жидкости. Кроме того, при снятии сигнала кнопочного переключателя КП1 происходит снижение величины сигнала на выходе интегратора 20, что приводит к снятию через соответствующие промежутки времени сигналов с управляющих входов коммутаторов 17, 15, и 14, при этом первыми размыкаются контакты коммутатора 17, вторыми - контакты коммутатора 15 и последними - контакты коммутатора 14. При разомкнутых контактах коммутаторов на управляющие входы распределительных секций СПУ4... СПУ6 сигналы не поступают, золотники занимают нейтральное положение, вращение гидромоторов прекращается.
Данная электрогидравлическая система управления реализована в составе машины загрузки анодной массы на Красноярском алюминиевом заводе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| ГИДРОПРИВОД ВЕНТИЛЯТОРОВ СИСТЕМЫ ОХЛАЖДЕНИЯ | 2000 |
|
RU2184250C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2001 |
|
RU2207489C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА КАЧАНИЯ КРИСТАЛЛИЗАТОРА | 2001 |
|
RU2201842C2 |
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ НАСОС | 2001 |
|
RU2183765C1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 1998 |
|
RU2138758C1 |
| ЕМКОСТНЫЙ ИЗМЕРИТЕЛЬ УРОВНЯ | 2001 |
|
RU2185605C1 |
| ГРУППОВОЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ (ВАРИАНТЫ) | 2001 |
|
RU2196250C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2151329C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СТЕКЛООЧИСТИТЕЛЯ | 1999 |
|
RU2162801C1 |
Система предназначена для управления технологическим оборудованием самоходного транспорта для раздачи анодной массы и других компонентов при электролизном производстве алюминия, а также может использоваться для раздачи сыпучих материалов в других отраслях машиностроения. Система содержит блок распределительных секций по числу исполнительных механизмов, пульт управления, выходы которого подключены к управляющим входам соответствующих распределительных секций, выходы которых связаны с соответствующими исполнительными механизмами, насос переменной производительности с электрогидравлическим регулятором, выход которого соединен с напорными магистралями распределительных секций, а его всасывающая полость и сливные магистрали распределительных секций соединены с баком, датчик давления и блок управления, согласно изобретению блок управления выполнен в виде формирователя сигналов управления, включающего коммутаторы по числу исполнительных механизмов, входы которых подключены к соответствующим выходам пульта управления, выход одного из них подключен к управляющему входу соответствующей распределительной секции непосредственно, выход другого связан с управляющим входом соответствующей распределительной секции через другое звено с коэффициентом передачи K1, выход третьего коммутатора через звено с коэффициентом передачи К2 подключен к первому неинвертирующему входу сумматора, второй инвертирующий вход которого соединен с выходом вновь введенного датчика скорости, а выход - с управляющим входом следующей распределительной секции, интегратора, вход которого соединен с соответствующим выходом пульта управления, а выход через компараторы подключен к управляющим входам коммутаторов, звену с переменным коэффициентом передачи, выход которого подключен к первому неинвертирующему входу сумматора, второй инвертирующий вход которого соединен с выходом датчика давления, а выход подключен к управляющему входу электрогидравлического регулятора насоса, управляющие входы звена подключены к соответствующим выходам пульта управления. Технический результат - повышение эксплуатационных характеристик системы управления. 1 ил.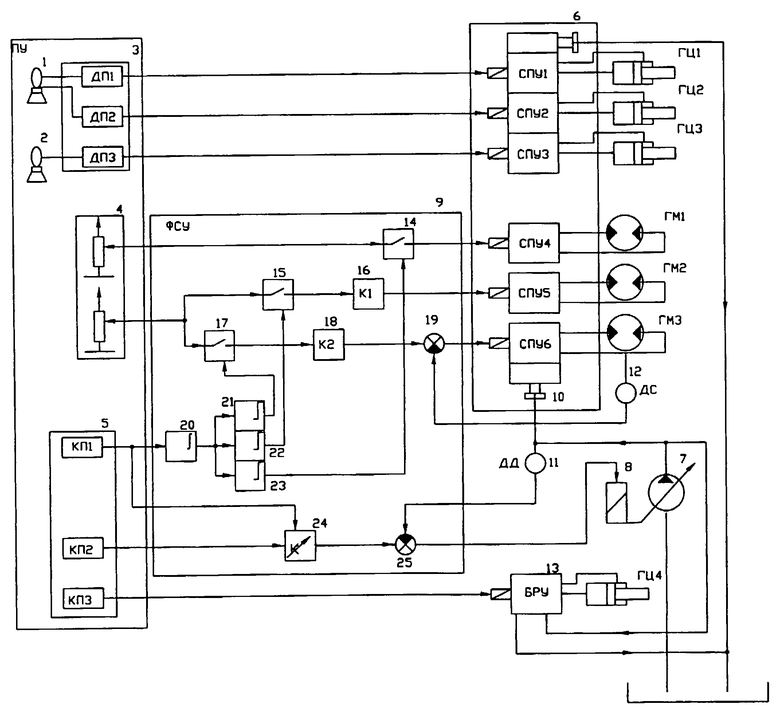
Электрогидравлическая система управления технологическим оборудованием, содержащая блок распределительных секций по числу исполнительных механизмов, пульт управления, выходы которого подключены к управляющим входам соответствующих распределительных секций, выходы которых связаны с соответствующими исполнительными механизмами, насос переменной производительности с электрогидравлическим регулятором, выход которого соединен с напорными магистралями распределительных секций, а его всасывающая полость и сливные магистрали распределительных секций соединены с баком, датчик давления и блок управления, отличающаяся тем, что блок управления выполнен в виде формирователя сигналов управления, включающего коммутаторы по числу исполнительных механизмов, входы которых подключены к соответствующим выходам пульта управления, выход одного из них подключен к управляющему входу соответствующей распределительной секции непосредственно, выход другого связан с управляющим входом соответствующей распределительной секции через другое звено с коэффициентом передачи K1, выход третьего коммутатора через звено с коэффициентом передачи К2 подключен к первому неинвертирующему входу сумматора, второй инвертирующий вход которого соединен с выходом вновь введенного датчика скорости, а выход с управляющим входом следующей распределительной секции, интегратора, вход которого соединен с соответствующим выходом пульта управления, а выход через компараторы подключен к управляющим входам коммутаторов, звену с переменным коэффициентом передачи, выход которого подключен к первому неинвертирующему входу сумматора, второй инвертирующий вход, которого соединен с выходом датчика давления, а выход подключен к управляющему входу электрогидравлического регулятора насоса, управляющие входы звена подключены к соответствующим выходам пульта управления.
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2034178C1 |
| Многоканальная электрогидравлическая система | 1989 |
|
SU1707289A1 |
| УНИВЕРСАЛЬНОЕ ИНДИКАТОРНОЕ УСТРОЙСТВО ДЛЯ ПРОВЕРКИ УРОВНЯ МАСЛА В СМАЗОЧНОЙ СИСТЕМЕ ДВИГАТЕЛЯ | 2000 |
|
RU2186999C2 |
| СТЕНД ДЛЯ ПРОВЕРКИ ПЕНОСМЕСИТЕЛЯ | 2010 |
|
RU2443445C1 |

