Изобретение относится к технике автоматического управления, в частности к технике формирования управляющих сигналов.
Известен способ формирования управляющего сигнала в релейных системах [1], основанный на использовании широтно-импульсной модуляции (ШИМ).
Недостаток этого способа состоит в том, что возможности этого способа ограничены:
1) реализация известного способа предполагает линейное изменение (увеличение) длительности управляющего релейного сигнала в зависимости от входного сигнала, что во многих случаях является неприемлемым;
2) изменение длительности и паузы релейного управляющего сигнала является взаимозависимым, что не позволяет реализовать требуемые характеристики динамического процесса.
Известен релейный регулятор [1], содержащий компаратор, фазоразделительный блок, инерционное звено обратной связи, выходной усилитель. Недостаток этого регулятора состоит в том, что достижение заданной длительности τд и паузы τп управляющего сигнала осуществляется за 1 счет параметров инерционного звена, что, во-первых, делает их изменение взаимозависимыми и, во-вторых, существенно ограниченными.
Наиболее близким техническим решением к предлагаемому способу формирования управляющего сигнала является способ, реализованный в устройстве [2], основанный на измерении в момент времени tk = kΔt (k = 1,2.., Δt - малая величина) входного сигнала U(tk) и формировании заданной длительности периода релейного управляющего сигнала при неизменной длительности импульса (т.е. формировании заданной паузы) в соответствии со значением измеренного входного сигнала U(tk).
Недостаток этого способа состоит в том, что он вносит запаздывание τз в систему управления. Вследствие этого система имеет меньшую область устойчивости, большее время переходного процесса и повышенные энергозатраты.
Наиболее близким техническим решением к релейному регулятору является устройство [3], содержащее генератор импульсов, счетчик импульсов, триггер, шифратор, ключ.
Недостаток этого устройства состоит в том, что он формирует только длительность импульса (или только паузу), оставляя неизменным период включения T исполнительных органов. Использование такого устройства в системе управления приводит к запаздыванию на время T, что в свою очередь уменьшает область устойчивости системы управления, увеличивает время переходного процесса и энергозатраты.
Задача изобретения - увеличение области устойчивости, уменьшение времени переходного процесса и энергозатрат.
Эта задача достигается тем, что способ формирования управляющего сигнала в релейных системах, включающий измерение и фиксацию в моменты времени tk = kΔt (k=1, 2..., Δt - малая величина) входного сигнала U(tk) и формирование заданной паузы (τп)i (i = 1,2...) релейного управляющего сигнала в соответствии со значением измеренного входного сигнала U(tk), отличающийся тем, что момент tk окончания формирования длительности (τд)i определяют в соответствии с заданным законом для τд по совпадению формируемой длительности (τд)i заданными значениями, соответствующими входному сигналу U(tk) в момент времени tk.
Релейный регулятор, содержащий генератор импульсов, соединенный своим выходом со входом счетчика импульсов, и триггер, отличается тем, что в него дополнительно введены аналого-цифровой преобразователь (АЦП), запоминающее устройство (ЗУ), цифровой компаратор и мультиплексор, управляющий вход которого соединен с выходом знакового разряда регистра данных АЦП, остальные выходы которого соединены с соответствующими входами регистра адреса ЗУ, выходы регистра данных которого соединены с соответствующими входами регистра первого сравниваемого числа цифрового компаратора, входы регистра второго сравниваемого числа которого соединены с соответствующими выходами счетчика импульсов, R-вход которого подключен к выходу цифрового компаратора и счетному входу триггера, выход которого соединен со входом старшего разряда регистра адреса ЗУ и сигнальным входом мультиплексора, выходы которого подключены соответственно к шинам положительного и отрицательного управляющего сигнала, а вход АЦП соединен со входом релейного регулятора.
На фиг. 1 приведена схема релейного регулятора, реализующего способ формирования управляющего сигнала. На фиг. 1: 1 - вход релейного регулятора, 2 - аналого-цифровой преобразователь (АЦП), 3 - запоминающее устройство (ЗУ), 4 - цифровой компаратор, 5 - триггер, 6 - счетчик импульсов, 7 - генератор импульсов, 8 - мультиплексор, 9 и 10 - соответственно шины положительного и отрицательного управляющих сигналов.
Вход 1 релейного регулятора соединен со входом аналого-цифрового преобразователя 2, выходы регистра данных которого соединены с соответствующими входами регистра адреса запоминающего устройства 3, вход старшего разряда которого соединен с входом триггера 5 и сигнальным входом мультиплексора 8. Выходы регистра данных ЗУ 3 подключены к соответствующим входам регистра первого сравниваемого числа цифрового компаратора 4, входы регистра второго сравниваемого числа которого подключены к соответствующим входам счетчика 6. Выход цифрового компаратора 4 соединен со счетным входом триггера 5 и входом R счетчика импульсов 6, вход которого соединен с выходом генератора импульсов 7. Выход знакового разряда регистра данных АЦП 1 соединен с управляющим входом мультиплексора 8, выходы которого подключены соответственно к шинам положительного 9 и отрицательного 10 управляющего сигнала.
Релейный регулятор работает следующим образом. Пусть на вход 1 релейного регулятора подается входной сигнал U. Этот сигнал поступает на вход АЦП 1 и преобразуется в n-разрядный код, который фиксируется в регистре данных АЦП 1. В этом регистре n-ый разряд определяет знак входного сигнала U, а разряды с 1 по (n-1) - значение (модуль) А входного сигнала U. Если Δt время преобразования АЦП, то в течение этого времени состояние регистра данных АЦП 1 остается неизменным. Код числа А поступает на регистр адреса ЗУ 3, на старший n-ый разряд которого подается выходной сигнал триггера 5. Состояние триггера 5 определяет на данный момент времени tk = kΔt (k=1, 2, 3...) формирование длительности τд или паузы τп выходного управляющего сигнала.
Если F - выходной сигнал триггера 5, то при F=1 формируется длительность τд, при F=0 формируется пауза τп управляющего сигнала.
В запоминающем устройстве 3 хранится массив M(τд) заданных значений длительности τд массив M(τп) заданных значений паузы τп. Пусть F = 1, а U > 0. В этом случае входной сигнал S знакового разряда регистра данных АЦП 1 равен нулю (S=0) и входной сигнал F+ мультиплексора 8 формируется на шине 9 положительного управляющего сигнала. При F=1 формируется управляющий сигнал F+= 1, длительность которого (τд)i (i=1, 2, 3...) определяется значением D1 регистра данных ЗУ 3 на момент времени tk.
Выходной сигнал C цифрового компаратора 4 формируется следующим образом: если значение числа D1, записанного в регистр первого сравниваемого числа цифрового компаратора 4, больше значения D2, записанного в регистр второго сравниваемого числа, то сигнал C=0, или
Если D1 ≥ D2, то C=0 (1)
Если D1 < D2, то C=1 (2)
Формирование длительности (τд)i начинается в момент перехода триггера 5 в единичное состояние (F=1). Это происходит в момент времени, когда появляется сигнал C= 1 (триггер 5 изменяет свое состояние при появлении на его счетном входе сигнала высокого уровня). При C=1 происходит обнуление счетчика импульсов 6. В этот момент времени выполняются условия (1) и счетчик импульсов 6 начинает считать импульсы, поступающие с генератора 7. Состояние цифрового компаратора 4 (C=0) не изменится до тех пор, пока не выполнятся условия (2), т.е. пока длительность (τд)i не стала равной заданной. В этот момент времени C=1, триггер 5 переходит в нулевое состояние (F=0) и с этого момента производится формирование паузы (τп)i управляющего сигнала F+=0, определяемой значением D1 регистра данных ЗУ 3. Формирование паузы (τп)i производится аналогично формированию длительности (τд)i.
Если входной сигнал U < 0, то S=1 и выходной сигнал F_ мультиплексора 8 формируется на шине 10 отрицательного управляющего сигнала аналогично уже описанному.
Таким образом, в рассматриваемом релейном регуляторе начало и окончание формирования длительности (τд)i и паузы (τп)i определяются текущими значениями входного сигнала U(tk), т.е. релейный регулятор практически не вносит запаздывания в систему управления. Запаздывание τз в системе определяется малой величиной Δt, равной времени преобразования входного сигнала U в код, что можно не учитывать.
В устройстве-прототипе начало и окончание формирования длительности (τд)i определяется текущим значением входного сигнала на момент времени начала формирования длительности и не зависит от изменения входного сигнала в течение времени Т - периода формирования управляющего сигнала (периода широтно-импульсной модуляции). Таким образом, запаздывание τз в известном устройстве определяется временем T.
Рассматриваемый релейный регулятор позволяет реализовать практически любые требования к параметрам (τд)i и (τп)i, которые записываются в массивах M(τд) и M(τп).
Покажем эффективность предлагаемого релейного регулятора на примере управления объектом второго порядка с передаточной функцией wo=1/p2 (например, управление ориентацией твердого тела).
Пусть входной сигнал U определяется в виде
U=x+my, (3)
где - x - координата,  - скорость изменения координаты, m - коэффициент.
- скорость изменения координаты, m - коэффициент.
Линию переключения релейного регулятора определили в виде
x + my = 0 (4)
на фазовой плоскости x, y.
Уравнение фазовой траектории можно записать в виде
y2-y
где x0, y0 - начальные значения координат x и y соответственно, ε - характеристика исполнительного двигателя, причем
С учетом запаздывания τз линии переключения будут иметь вид
x+(m-τз)y = 0 (7)
Для простоты будем считать, что при нахождении изображающей точки за пределами линии переключения (6) реализуется релейное управление. В этом случае, если в момент включения исполнительного органа значения координат равны x0 и y0, то в момент очередного переключения исполнительных двигателей координата y1 = -y0+2ε(m-τз). Время включенного состояния исполнительного двигателя t1 равно
Для i-го цикла переключения (i=1, 2,...)
yi = -y0+2iε(m-τз) (9)
Число циклов переключения i можно определить из условия yi = 0, т.е.
Время переходного процесса Tn определится в виде
Энергозатраты Q определяем как некоторую величину, пропорциональную времени включения двигателей Tn, т.е.
Q = ITn, (12)
где I - коэффициент.
Пусть y0= 10o/c, m = 1 с, τз = 0,5 с (Т = 0,5), ε = 1 o/c2. Тогда для известного устройства i = 20, Tn = 145 с, Q = 145I. Для предлагаемого релейного регулятора i' = 10, T'n = 70 с, Q = 70I.
Иначе говоря, время переходного процесса и энергозатраты рассматриваемого релейного регулятора значительно ниже времени переходного процесса и энергозатрат известного устройства. Условия устойчивости системы определяются в виде
(m-τз) > 0
или
m > T для известного устройства,
m > Δt для предлагаемого релейного регулятора, т.е. область устойчивости системы при использовании предлагаемого релейного регулятора больше области устойчивости при использовании известного устройства.
Предлагаемая совокупность признаков в рассматриваемых авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень". В качестве АЦП, ЗУ, цифрового компаратора, мультиплексора могут быть использованы микросхемы типа 1113ПВ1, 556РТ5, 564ИП2, 564КП1.
Реализация счетчика, триггера, генератора широко известна (например 564ИЕ14, 564ТМ2, 564ГГ1).
Литература
1. Авторское свидетельство СССР N 537347, G 06 F 11/00, 1976.
2. Авторское свидетельство СССР N 894668, G 05 В 11/28, 1981.
3. Авторское свидетельство СССР N 502493, H 03 К 5/04, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО СИГНАЛА В РЕЛЕЙНЫХ СИСТЕМАХ С ЗОНОЙ НЕЧУВСТВИТЕЛЬНОСТИ И ЗОНОЙ НЕПРЕРЫВНОГО УПРАВЛЕНИЯ И РЕЛЕЙНЫЙ РЕГУЛЯТОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2413965C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2009 |
|
RU2408045C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2009 |
|
RU2408046C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2009 |
|
RU2422870C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2009 |
|
RU2408914C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2007 |
|
RU2342690C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2009 |
|
RU2409824C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2009 |
|
RU2401449C1 |
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ЧЕТЫРЕХФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2133550C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2114771C1 |
Предлагаемое изобретение относится к технике автоматического управления, в частности к технике формирования управляющих сигналов. Технический результат заключается в расширении области устойчивости, снижении времени переходного процесса и энергозатрат. Способ формирования управляющего сигнала в релейных системах основан на независимом, поочередном формировании длительности τд и паузы τп управляющего сигнала по фиксированным значениям измеренного входного сигнала и не вносит запаздывания в систему управления. Релейный регулятор, реализующий данный способ, содержит аналого-цифровой преобразователь, запоминающее устройство, цифровой компаратор, триггер, мультиплексор, генератор и счетчик импульсов. Заданные параметры τд и τп как функции входного сигнала записаны в запоминающем устройстве и благодаря непрерывному сравнению фактических величин с заданными релейный регулятор не вносит запаздывания в систему управления. Предлагаемые способ формирования управляющего сигнала и релейный регулятор могут быть использованы в различных системах управления объектами, в частности в системах управления космическими аппаратами. 2 с.п.ф-лы, 1 ил.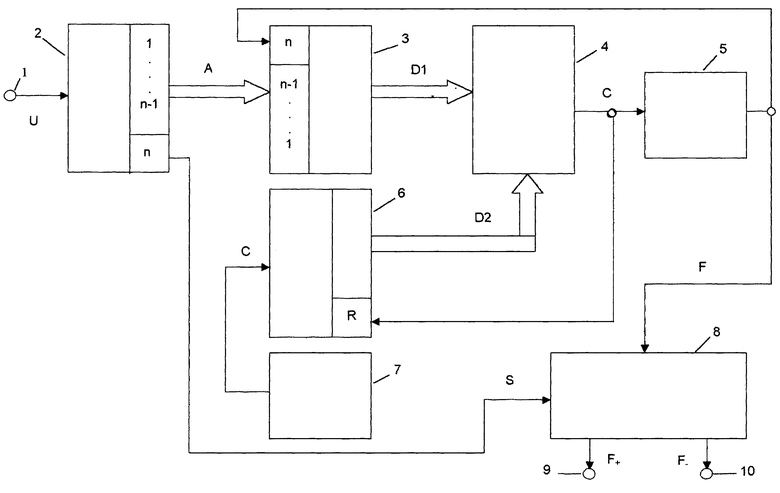
| Релейная система автоматического регулирования | 1980 |
|
SU894668A1 |
| Формирователь длительности импульсов | 1974 |
|
SU502493A1 |
| Цифровое управляющее устройство (его варианты) | 1982 |
|
SU1019399A1 |
| Резервированный фазочувствительный преобразователь | 1974 |
|
SU537347A1 |
| US 3691452 A, 12.09.72. | |||

