Изобретения относится к области неразрушающего контроля изделий акустическими методами и могут быть использованы для измерения параметров, в частности толщины, объектов из электропроводных и диэлектрических материалов.
Известны способы электромагнитно-акустического (ЭМА) контроля и устройства для их осуществления, согласно которым при помощи ЭМА-преобразователей возбуждают в изделии акустические колебания, по которым судят о параметрах контролируемого изделия (Неразрушающий контроль и диагностика. Справочник под ред. В.В.Клюева. М., "Машиностроение", 1995, стр. 108-172).
Однако указанные способы отличаются невысокой чувствительностью, а ЭМА-преобразователи громоздки, поскольку требуют мощной намагничивающей системы.
Наиболее близким по совокупности существенных признаков к заявляемому способу является способ контроля по авт.св. СССР N 1226274, G 01 N 27/90, в соответствии с которым ЭМА-преобразователь запитывают импульсом напряжения и регистрируют возникающие в нем упругие колебания, по параметрам которых определяют реакцию контролируемого объекта и результаты контроля.
Известен также преобразователь для осуществления указанного способа контроля (см. там же), в котором имеются возбуждающая обмотка, короткозамкнутый виток и приемник упругих колебаний, акустически связанный с короткозамкнутым витком через диэлектрический звукопровод.
Однако чувствительность данного способа и устройства для его осуществления незначительно превышает чувствительность вышеуказанных аналогов, поскольку приемник упругих колебаний регистрирует только переданный через диэлектрический звукопровод сигнал, принятый ЭМА-преобразователем. Кроме того, значительные размеры подмагничивающей системы ЭМА-преобразователя не позволяют снизить габариты датчика до размеров, соизмеримых с пьезоэлектрическим преобразователем (ПЭП).
Задачей предлагаемой группы изобретений является повышение чувствительности и расширение функциональных возможностей способа контроля и устройства для его осуществления путем обеспечения надежного контроля изделий как из электропроводных, так и из диэлектрических материалов при постоянном контроле качества акустического контакта.
Поставленная задача решается за счет того, что в способе неразрушающего контроля, заключающемся в том, что импульсом напряжения запитывают ЭМА-преобразователь, возникающие в нем упругие колебания регистрируют с помощью ПЭП, акустически связанного с ЭМА-преобразователем, и по параметрам этих колебаний судят о реакции контролируемого объекта, согласно изобретению определяют наличие акустического контакта между контролируемым объектом и ЭМА-преобразователем, после чего импульсом напряжения синхронно запитывают ЭМА-преобразователь и ПЭП, а результаты контроля определяют одновременно по возникающим в них электрическим сигналам.
Кроме того, чувствительность контроля может быть еще увеличена при охлаждении криогенной жидкостью преобразователей и контролируемой зоны объекта.
Поставленная задача решается также за счет того, что в устройство для неразрушающего контроля, содержащее ЭМА-преобразователь, который включает в себя возбуждающую обмотку, короткозамкнутый виток, звукопровод, и имеющее также приемник упругих колебаний, контактирующий с поверхностью звукопровода и акустически связанный через него с короткозамкнутым витком, в отличие от прототипа введены блок контроля сигнала с ЭМА-преобразователя, блок контроля сигнала с приемника упругих колебаний, подключенные к блоку синхронизации импульсной запитки преобразователей, блок контроля акустического контакта между устройством и контролируемым объектом, блок управления, многопозиционный коммутатор, блок сравнения, блок регистрации и записи результатов контроля, звукопровод выполнен в виде постоянного магнита, а приемником упругих колебаний является ПЭП.
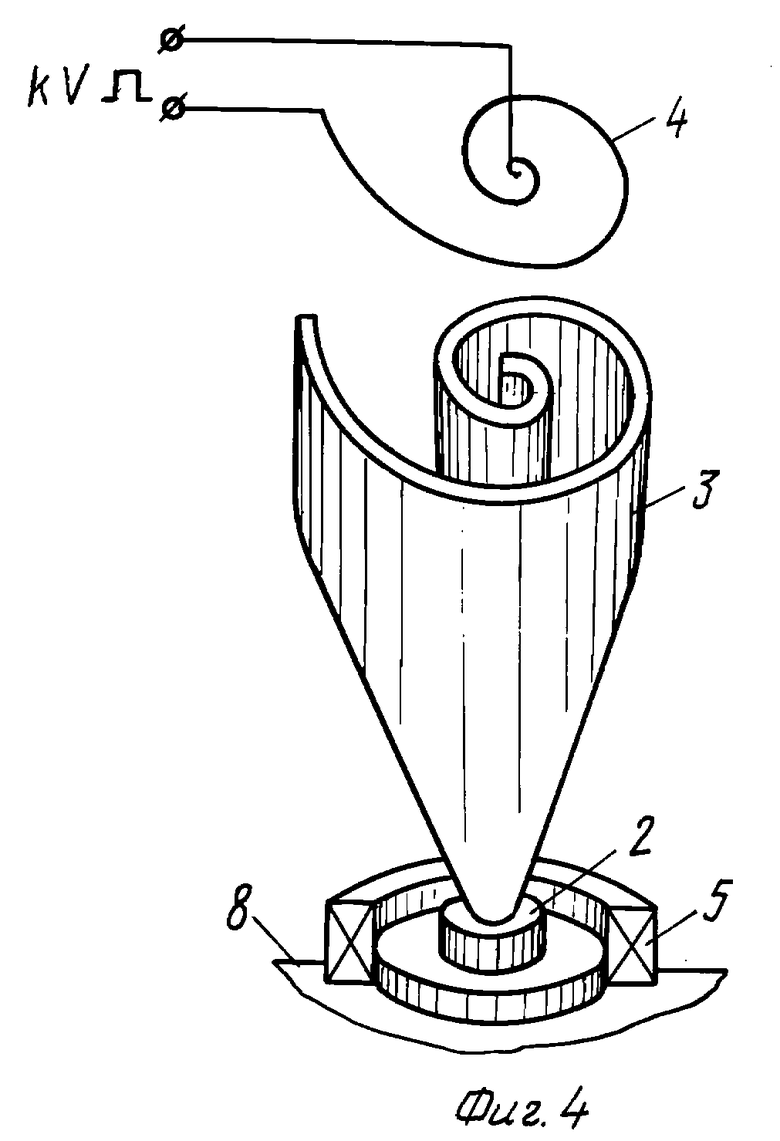
При этом постоянный магнит может быть выполнен, например, в форме "улитки" - объемно-пространственной спирали.
Кроме того, короткозамкнутый виток может быть выполнен в виде плоской чувствительной катушки, размещенной на поверхностях ПЭП и/или постоянного магнита.
При осуществлении предлагаемых изобретений создается технический результат, заключающийся в следующем.
При сниженном возбуждении ЭМА-преобразователя и ПЭП осуществляется взаимодействие акустического и магнитного полей и за счет отрицательного поглощения происходит взаимное усиление как чисто акустического сигнала с ПЭП, так и ЭМА-сигнала с ЭМА-преобразователя, что позволяет снизить потребляемую мощность канала ЭМА-контроля при повышении чувствительности устройства. При этом использование магнитного поля магнитного звукопровода обеспечивает ЭМА-преобразование не на поверхности контролируемого объекта, а в самом устройстве, что, с одной стороны, обеспечивает возможность контроля диэлектриков, а с другой стороны, позволяет снизить размеры подмагничивающей системы. Кроме того, возможно осуществлять импульсное намагничивание небольшой катушки, которая может быть совмещена с короткозамкнутым витком. Т.о. обеспечиваются возможность уменьшения размеров устройства и приближение его к размерам ПЭП.
Специальная форма магнитного звукопровода в виде объемно-пространственной спирали ("улитки") позволяет снизить волновые потери в звукопроводе и тем самым также повышает чувствительность устройства.
Охлаждение устройства криожидкостью приводит к появлению сверхпроводящего магнитного звукопровода с отрицательным акустическим поглощением, а наличие криожидкости в контролируемой зоне снижает потери в зазоре между устройством и контролируемым объектом и, следовательно, также обеспечивает повышение чувствительности.
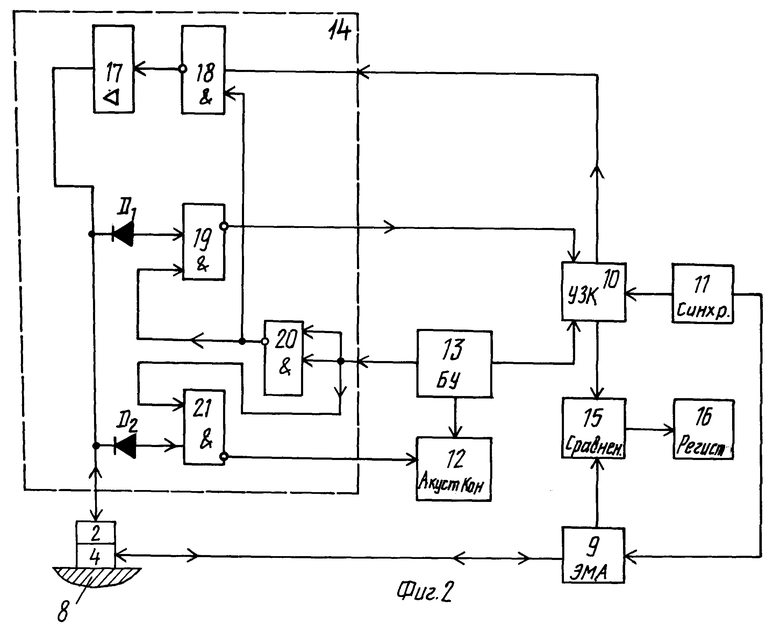
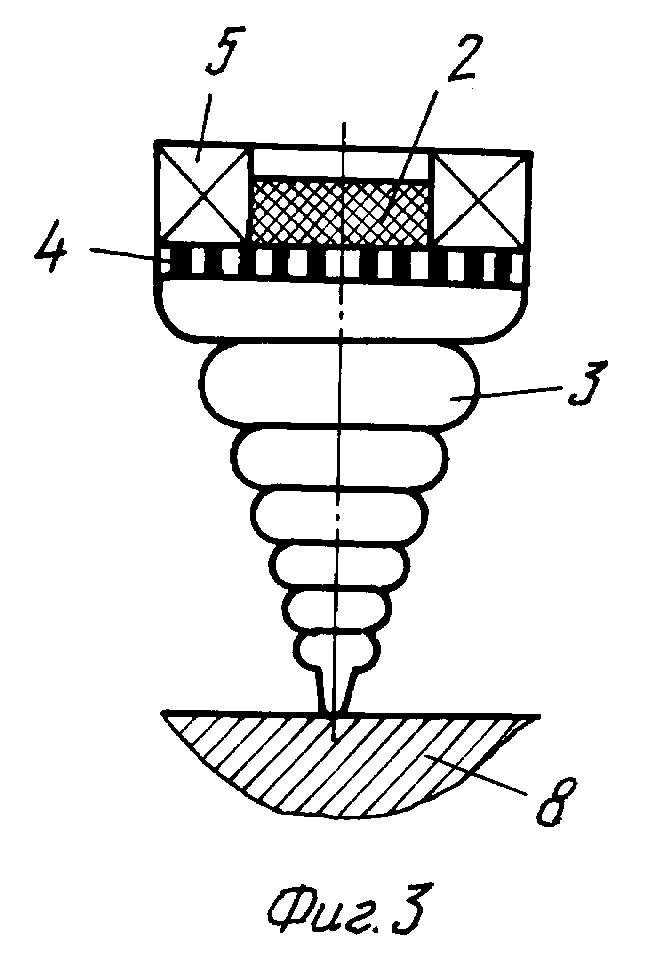
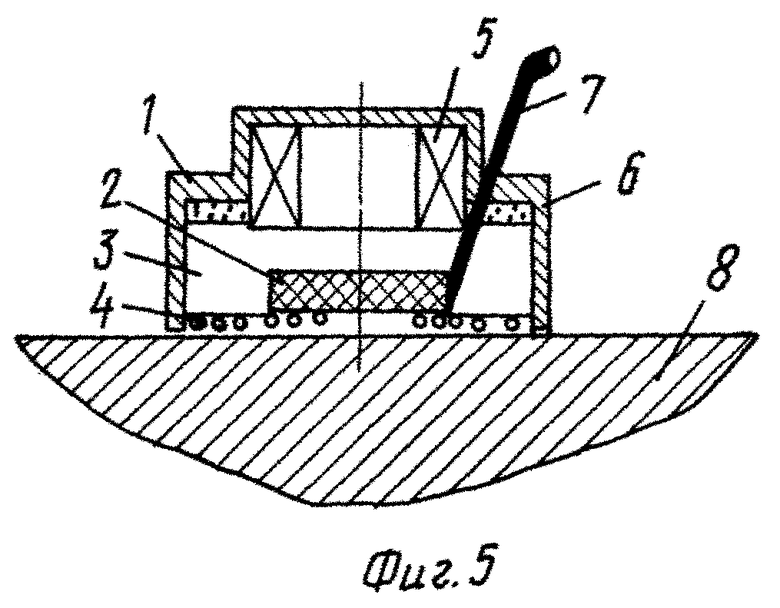
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена конструкция устройства для неразрушающего контроля, на фиг. 2 - блок-схема для реализации предложенного способа неразрушающего контроля, на фиг. 3, 4 - формы выполнения звукопровода, фиг. 5 - размещение ПЭП и короткозамкнутого витка.
Устройство для неразрушающего контроля включает корпус 1, в котором размещены ПЭП 2, звукопровод 3 в виде постоянного магнита, короткозамкнутый виток 4, например, в виде плоской чувствительной катушки, возбуждающая обмотка 5, демпфер 6 и трубка 7 для подачи криогенной жидкости. ПЭП 2 размещен на поверхности звукопровода 3, противоположной контролируемому объекту 8 (фиг. 1) или со стороны контролируемого объекта 8 (фиг. 5).
Блок-схема для реализации предложенного способа включает блок 9 контроля сигнала с ЭМА-преобразователя (например, ЭМА-толщиномер типа УТ-90Б) и блок 10 контроля сигнала с ПЭП 2 (например, эхо-импульсный толщиномер типа УТ-93М), подключенные к блоку 11 синхронизации импульсной запитки преобразователей, а также блок 12 контроля акустического контакта, блок 13 управления, многопозиционный коммутатор 14, блок 15 сравнения и блок 16 регистрации и записи результатов контроля.
Блок 11 представляет собой синхронизатор, управляемый процессором по заданному закону, и может быть одним из встроенных синхронизаторов серийных приборов УТ 93М или УТ 90Б.
Блок 12, служащий для автоматической сигнализации о наличии акустического контакта, может быть выполнен на базе стандартных электронных устройств: усилители, компараторы, световые и звуковые сигнализаторы.
Блок 13, осуществляющий с помощью микропроцессоров управление работой всей схемы, представляет собой генератор эталонных импульсов (таймер), который вырабатывает сигналы логической единицы "1" и логического нуля "0".
Многопозиционный коммутатор 14 включает усилитель 17, блоки 18, 19, 20, 21, выполненные на базе логических элементов И-НЕ (например, типа К155ЛА8 и К176КТИ), и диоды D1 и D2 (например, типа КД212А, Д226 или КУ1094), подключенные соответственно к входам блоков 19 и 21.
Блок 15 сравнения может быть выполнен в виде компаратора с микропроцессорами, осуществляющими анализ сигналов, поступающих с блоков 9, 10.
Блок 16 может быть выполнен в виде многоканальной регистрирующей аппаратуры с цифровой индикацией и выводами на печатающее устройство.
В процессе работы первоначально осуществляют контроль акустического контакта между устройством и объектом 8 путем прижатия, для чего анализируют в блоке 12 сигнал, поступающий на него с ПЭП 2 через диод D2 и блок 21, сравнивая его с эталонным. При наличии акустического контакта блок 13 отключает блоки 21 и 12 от ПЭП 2 и переводит всю схему в режим измерения.
При этом осуществляют одновременную подачу сигналов на ПЭП 2 и короткозамкнутый виток 4 путем синхронной работы блоков 9 и 10 с помощью синхронизатора 11. Вследствие совместной раскачки акустическими колебаниями ПЭП 2 и поверхности звукопровода 3 с установленным на ней короткозамкнутым витком 4 осуществляется колебание электромагнитного поля ЭМА-преобразователя и в токопроводящем изделии путем ЭМА-преобразования осуществляют генерацию акустических (упругих) колебаний. Звукопровод 3 в виде постоянного магнита осуществляет акустическую связь ПЭП 2 и ЭМА-преобразователя с изделием 8, т.к. через него упругие колебания от ПЭП 2 передаются в изделие 8. Обратное ЭМА-преобразование при контроле электропроводных изделий осуществляется традиционным образом при приеме сигнала.
Кроме того, как при прямом, так и при обратном ЭМА-преобразованиях в звукопроводе 3 происходит усиление акустических сигналов вследствие отрицательного поглощения от эффекта взаимодействия акустических колебаний и магнитного поля. Это же усиление осуществляется для акустических колебаний ПЭП 2 в звукопроводе 3. Это отрицательное поглощение усиливается при охлаждении магнитного звукопровода 3 и короткозамкнутого витка 4 криожидкостью, подаваемой по трубке 7, снижающей потери в зазоре между устройством и изделием 8 и создающей эффект сверхпроводимости в короткозамкнутом витке 4 и электропроводном контролируемом изделии 8, а также за счет эффекта Джозефсона, Виллари и Майснера в электропроводном изделии 8 и звукопроводе 3. За счет синхронной раскачки ПЭП 2 и ЭМА-преобразователя при излучении снижается потребляемая мощность ЭМА- преобразователя вследствие того, что используется колебательная энергия ПЭП 2, раскачиваемого блоком 10 совместно с звукопроводом 3 и короткозамкнутым витком 4. Для снижения волновых потерь в магнитном звукопроводе и рассеивания и более полной передачи акустической энергии от поверхности ПЭП 2 и короткозамкнутого витка 4 к изделию и обратно изготавливают звукопровод 3 в виде "улитки" -объемно-пространственных спиралей, например спирали Архимеда (или) логарифмической спирали (фиг. 3 и фиг. 4).
При контроле диэлектриков и приеме акустических сигналов из контролируемого изделия 8 все повторяется в обратной последовательности, причем ПЭП 2 принимает сигнал совместно с блоком 10 в любом случае при наличии акустического контакта, а колебания ПЭП 2 совместно с магнитным звукопроводом 3 не только усиливают принимаемые акустические колебания от взаимодействия акустических и магнитных полей при отрицательном поглощении, но и обеспечивают колебание короткозамкнутого витка 4 в магнитном поле звукопровода 3 с частотой акустических принимаемых колебаний из изделия 8 и, таким образом, обеспечиваются ЭМА-преобразования внутри датчика. Но даже если чувствительности ЭМА-преобразователя не хватит для приема сигнала из контролируемого диэлектрика, независимый канал ПЭП 2 с блоком 10 все равно всегда осуществит контроль и необходимое измерение, т.е. независимость каналов и преобразователей обеспечивает дополнительно необходимое дублирование, достоверность измерений и надежность контроля, одновременно совмещая достоинства ЭМА- и пьезопреобразователей, и даже обеспечивает бинокулярный эффект измерения двумя независимыми датчиками разной физической природы.
Таким образом, работа схемы в двух режимах (контроль акустического контакта и режим измерения) осуществляется с помощью блока 13 управления. При поступлении с блока 13 сигнала логической единицы "1" на вход блока 21 последний подключает ПЭП 2 к блоку 12 контроля акустического контакта. При этом от ПЭП 2 отключается блок 10 с помощью блоков 18, 19, на которые поступает инвентируемый сигнал с блока 20.
При появлении на блоке 13 сигнала логического нуля "0", что соответствует режиму измерения, блок 21 закрывается и отключает ПЭП 2 от блока 12. Сигнал с ПЭП 2 поступает через диод D1 и блоки 19 на блок 10.
При отсутствии зондирующего импульса диоды D1 и D2 не оказывают влияния на работу блоков 19 и 21, являясь обычным сопротивлением в этих цепях, и пропускают сигнал с ПЭП 2 лишь на блок 10 (в режиме приема ЭХО-сигнала) либо на блок 12 контроля акустического контакта.
Размещение плоской чувствительной катушки на поверхности постоянного магнита обеспечивает максимально возможные колебания постоянного магнитного поля этого магнита для более эффективного ЭМА-преобразования.
При размещении плоской чувствительной катушки на поверхности ПЭП достигаются более интенсивные колебания электромагнитного поля этой катушки, что также обеспечивает повышение эффективности ЭМА-преобразования при контроле изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ электромагнитного контроля и преобразователь для его осуществления | 1984 |
|
SU1226274A1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| Способ дефектоскопии и устройство для его осуществления | 1990 |
|
SU1783413A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ КОНТРОЛЯ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2015 |
|
RU2584274C1 |
| Электромагнитно-акустический преобразователь для неразрушающего контроля | 1988 |
|
SU1702296A1 |
| СПОСОБ АКУСТИЧЕСКОГО КОНТРОЛЯ ИЗДЕЛИЙ | 1990 |
|
SU1745044A1 |
| Способ электромагнитно-акустического возбуждения и приема акустических импульсов и дефектоскоп для его осуществления | 2023 |
|
RU2821844C1 |
| Электромагнитно-акустический преобразователь | 1989 |
|
SU1705736A1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ И ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2561250C2 |
Изобретение относится к области неразрушающего контроля акустическими методами. Для этого вначале импульсом напряжения запитывают электромагнитно-акустический преобразователь, регистрируют возникающие в нем упругие колебания с помощью акустически связанного с ним пьезопреобразователя, по параметрам этих колебаний определяют наличие акустического контакта между контролируемым объектом и устройством, после чего синхронно импульсом напряжения запитывают электромагнитно-акустический и пьезопреобразователи, а результаты контроля определяют одновременно по возникающим в них электрическим сигналам. При этом в устройствах для осуществления способа, включающих возбуждающую обмотку, короткозамкнутый виток и акустически связанный с ним приемник упругих колебаний, звукопровод выполнен в виде постоянного магнита, а приемник упругих колебаний совмещен с излучателем упругих колебаний. Использование предлагаемых способа и устройств позволяет повысить чувствительность и обеспечить контроль изделий как из электропроводных, так и из диэлектрических материалов. 3 с.п. и 3 з.п.ф-лы, 5 ил.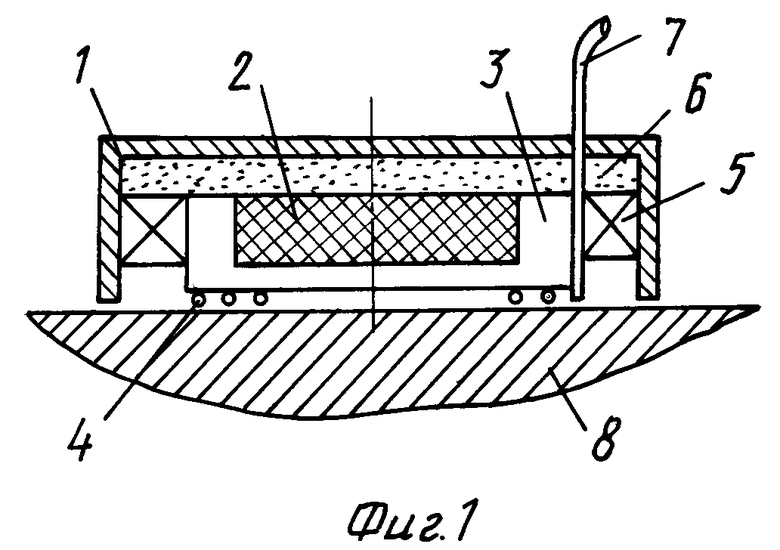
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1989 |
|
RU2019824C1 |
| Электромагнитно-акустический преобразователь поверхностных волн | 1989 |
|
SU1739280A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| US 4104922 A, 08.08.78 | |||
| US 4395913 A, 02.08.83 | |||
| БЕСКОНТАКТНЫЙ ПОНДЕРОМОТОРНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 0 |
|
SU249728A1 |
| БЕСКОНТАКТНЫЙ МАГНИТОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 0 |
|
SU251895A1 |
