Изобретение относится к регуляторам натяжения длинномерных материалов при изготовлении изделий из композиционных материалов методом намотки пропитанного связующим ленточного материала на вращающуюся оправку переменного радиуса.
Известен регулятор натяжения, содержащий блок управления электродвигателем с исполнительным механизмом, датчики натяжения, установленные соответственно до и после исполнительного механизма, элемент сравнения, входы которого соответственно подключены к датчику натяжения, установленному после исполнительного механизма, и задатчику натяжения, датчик скорости материала, вычислительный блок и ключ [1] . Однако наличие датчика предварительного натяжения влечет за собой как дополнительные затраты, так и требование его размещения в определенном месте лентоформирующего тракта, что не всегда возможно. Кроме того, использование в структуре датчика скорости транспортирования материала в лентоформирующем тракте предполагает наличие в тракте вращающихся проводников, что из-за обрыва отдельных волокон ведет к нарушению технологического режима.
Наиболее близким к предлагаемому изобретению является регулятор натяжения, содержащий датчик и задатчик натяжения, через блок сравнения подключенные к первому входу блока управления, выходом электрически связанного с электродвигателем, вал которого кинематически соединен с исполнительным механизмом, а также датчик и задатчик угла поворота исполнительного механизма, соединенные через дополнительный блок сравнения со вторым входом блока управления [2].
Однако известное устройство имеет невысокую точность регулирования величины натяжения, так как принцип работы его основывается на предположении постоянства натяжения на участке материала до исполнительного механизма, что в реальной системе не наблюдается ввиду того, что скорость протяжки материала существенно переменная величина.
Задачей изобретения является повышение точности регулирования натяжения при изменении скорости протяжки материала в широком диапазоне и расширение регулируемого диапазона натяжения.
Поставленная задача решается при помощи регулятора натяжения, содержащего датчик и задатчик натяжения, через блок сравнения подключенные к входу блока управления, выходом электрически связанного с первым электроприводом, вал которого кинематически соединен с основным исполнительным механизмом, а также датчик и задатчик угла поворота основного исполнительного механизма, соединенные с дополнительным блоком сравнения, второй электропривод, гибко связанный через пружинную муфту с основным исполнительным механизмом, вычислительный блок, при этом выходы датчика и задатчика натяжения, датчика и задатчика угла поворота основного исполнительного механизма связаны с соответствующими входами вычислительного блока, к выходу которого подключен второй дополнительный электропривод, а выход дополнительного блока сравнения подключен к входу фильтра, причем выход фильтра связан с входом дополнительного третьего электропривода, вал которого кинематически соединен с дополнительным исполнительным механизмом, расположенным перед основным исполнительным механизмом.
На чертеже представлена структурная схема устройства.
Регулятор натяжения содержит датчик угла поворота 1, связанный с исполнительным механизмом 2, регулирующим натяжение гибкого материала 3. Выход датчика 1 угла поворота подключен к одному из входов блока сравнения 4, ко второму входу которого подключен задатчик угла поворота 5. Выход блока сравнения 4 связан с входом фильтра 6, выход которого подсоединен к электроприводу 7, на валу которого жестко закреплен исполнительный механизм 8. Выход датчика натяжения 9 подключен к одному из входов блока сравнения 10, ко второму входу которого подключен задатчик 11 натяжения. Выход блока сравнения 10 подсоединен к входу блока управления 12, выход которого связан с электроприводом 13, на валу которого жестко закреплен исполнительный механизм 2. Входы вычислительного блока 14 соединены с выходами датчиков 1, 9 и задатчиков 5, 11, а его выход - с электроприводом 15, вал которого через пружинную муфту 16 гибко связан с исполнительным механизмом 2.
Устройство работает следующим образом.
С датчика 9 натяжения, установленного на регулируемом участке 3, сигнал, пропорциональный натяжению T2, поступает на элемент сравнения 10, где сравнивается с сигналом, пропорциональным требуемому значению натяжения T0, поступающему от задатчика натяжения 11. В зависимости от их соотношения в блоке управления 12 вырабатывается управляющее воздействие, поступающее на электропривод 13, вал которого жестко связан с исполнительным механизмом 2. Подача управляющего воздействия на электропривод 13 вызовет поворот исполнительного механизма 2 на угол α.
С вала исполнительного механизма 2 при помощи датчика 1 угла поворота снимается сигнал ϕ1, пропорциональный углу отклонения вилки исполнительного механизма 2 от горизонтали и подается на первый вход блока сравнения 4, к второму входу которого подключен задатчик 5 значения угла. Если T2 < T0+ ΔT0 или T2 > T0+ ΔT0, где ΔT0 - порог срабатывания регулятора по натяжению для контура с гибкой связью с исполнительным механизмом 2, то в вычислительном блоке 14 в зависимости от положения исполнительного механизма 2 вырабатывается сигнал на включение электропривода 15, который обеспечивает через закручивание (раскручивание) пружины подачу на исполнительный механизм момента Mпр, компенсирующего систематическую погрешность регулятора по основному контуру с приводом 13, путем изменения угла α.
Сигнал с выхода элемента сравнения 4 подается на вход фильтра 6, который выделяет усредненное по времени значение ошибки регулирования угла и в зависимости от ее знака электропривод 7 производит разворот дополнительного исполнительного механизма 8 в сторону увеличения (уменьшения) предварительного натяжения T1 материала, поступающего на вход основного исполнительного механизма 2.
Изменение угла α и входного натяжения T1 влечет за собой изменение момента на исполнительном механизме 2, а значит и натяжения, пропорционального этому моменту. Таким образом осуществляется регулирование натяжения гибкого материала.
Экономический эффект от использования данного регулятора определяется высокой точностью стабилизации натяжения материала.
Источники информации
1. Авторское свидетельство СССР N 979251, B 65 H 77/00, 1982.
2. Авторское свидетельство СССР N 956405, B 65 H 77/00, 1982.
Изобретение относится к регуляторам натяжения длинномерных материалов и используется при автоматизации процесса изготовления изделий из композиционных материалов методом намотки. Сущность изобретения: устройство дополнительно содержит компенсационную пружинную муфту с электроприводом и дополнительный исполнительный механизм, расположенный перед основным исполнительным механизмом. Техническим результатом, на который направлено данное изобретение, является повышение точности регулирования натяжения при изменении скорости протяжки материала в широком диапазоне и расширение регулируемого диапазона натяжения. 1 ил.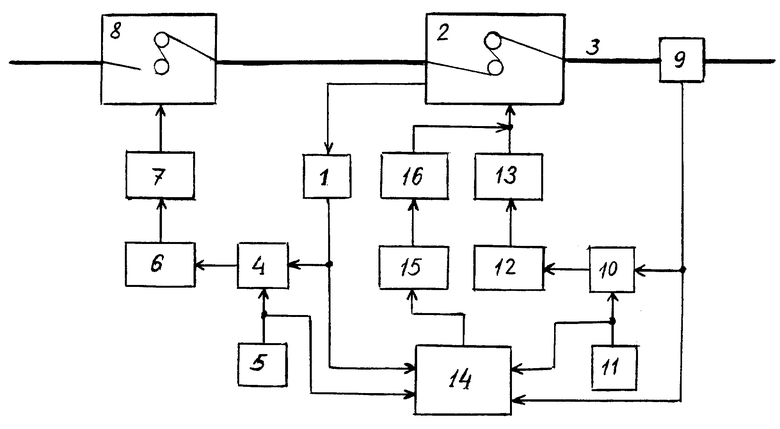
Регулятор натяжения, содержащий датчик и задатчик натяжения, через блок сравнения подключенные к входу блока управления, выходом электрически связанного с первым электроприводом, вал которого кинематически соединен с основным исполнительным механизмом, а также датчик и задатчик угла поворота основного исполнительного механизма, соединенные с дополнительным блоком сравнения, отличающийся тем, что дополнительно содержит второй электропровод, гибко связанный через пружинную муфту с основным исполнительным механизмом, вычислительный блок, при этом выходы датчика и задатчика натяжения, датчика и задатчика угла поворота основного исполнительного механизма связаны с соответствующими входами вычислительного блока, к выходу которого подключен второй дополнительный электропровод, а выход дополнительного блока сравнения подключен к входу фильтра, причем выход фильтра связан с входом дополнительного третьего электропровода, вал которого кинематически соединен с дополнительным исполнительным механизмом, расположенным перед основным исполнительным механизмом.
| Регулятор натяжения | 1981 |
|
SU956405A1 |
| 1979 |
|
SU825426A1 | |
| Самоочищающийся фильтр | 1972 |
|
SU579854A3 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ | 1998 |
|
RU2146805C1 |
| US 5277378 А, 11.01.94 | |||
| US 5490638 А, 13.02.96. | |||
