Изобретение относится к электротехнике, а именно к управлению электроприводами переменного тока с упругими связями путем изменения частоты и величины токов питания статора, и может быть использовано для регулирования скорости станков, вентиляторов и других машин и механизмов, оснащенных асинхронными двигателями.
Наиболее близким к предлагаемому устройству является электропривод переменного тока, содержащий асинхронный двигатель, последовательно соединенные между собой регулятор скорости, преобразователь координат и преобразователь энергии, выход которого подключен к статорной обмотке асинхронного двигателя, датчик угла, механически связанный с ротором асинхронного электродвигателя, задатчик реактивного тока, выход которого подключен к соответствующему входу преобразователя координат и первому входу формирователя частоты токов ротора, второй вход которого связан с выходом регулятора скорости, а выход формирователя частоты токов ротора соединен с соответствующим входом преобразователя координат, формирователь синусоидальных сигналов, выходы которого подключены ко входам опорных сигналов преобразователя координат, умножитель частоты, вход которого подключен к датчику угла, а выходы связаны с соответствующими входами регулятора скорости и преобразователя координат, а также генератор опорных сигналов [1].
Недостатком этого технического решения является отсутствие возможности демпфирования упругих колебаний асинхронного двигателя и исполнительного механизма, поскольку электропривод переменного тока не обеспечивает контроль и регулирование величины упругого момента и скорости исполнительного механизма. Высокая колебательность рабочих органов машин и механизмов приводит к увеличению времени переходных процессов в динамических режимах работы, т.е. к снижению производительности, а также к ухудшению качества выпускаемой продукции.
Изобретение направлено на улучшение динамических показателей работы электропривода за счет демпфирования упругих колебаний.
Это достигается тем, что в устройство для управления асинхронным электроприводом, содержащее асинхронный двигатель, соединенный через упругую передачу с исполнительным механизмом, последовательно соединенные между собой регулятор скорости, преобразователь координат и преобразователь энергии, выход которого подключен к статорной обмотке асинхронного двигателя, датчик угла, механически связанный с ротором асинхронного электродвигателя, задатчик реактивного тока, выход которого подключен к соответствующему входу преобразователя координат и первому входу формирователя частоты токов ротора, второй вход которого связан с выходом регулятора скорости, а выход формирователя частоты токов ротора соединен с соответствующим входом преобразователя координат, формирователь синусоидальных сигналов, выходы которого подключены к входам опорных сигналов преобразователя координат, формирователь сигналов обратной связи по скорости и перемещению, вход которого подключен к датчику угла, а выходы связаны с соответствующими входами регулятора скорости и преобразователя координат, а также генератор опорных сигналов, введен адаптивный регулятор, содержащий общую шину, к которой подключены микропроцессор, оперативное запоминающее устройство, постоянное запоминающее устройство, селектор адреса и приемопередатчик данных, к выходной шине которого подключены два регистра данных, последовательно соединенные мультиплексор аналоговых сигналов, аналого-цифровой преобразователь и устройство ввода цифровых сигналов, выход которого соединен со входной шиной приемепередатчика, цифроаналоговый преобразователь, подключенный к выходу первого регистра, а также счетчик, вход которого соединен с выходом формирователя сигналов обратной связи, а выход подключен к второму входу устройства ввода цифровых сигналов, выход цифроаналогового преобразователя соединен с входом регулятора скорости, выходы селектора адреса соединены с разрешающими входами регистров и адресным входом устройства ввода цифровых сигналов, три входа мультиплексора аналоговых сигналов связаны с датчиками токов фаз статора асинхронного двигателя, а адресные входы - с выходом второго регистра.
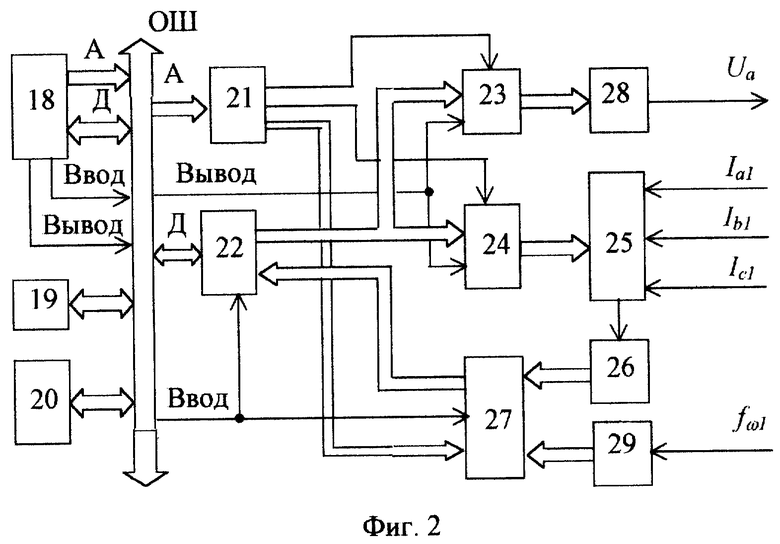
На фиг. 1 представлена схема устройства для управления асинхронным электроприводом с упругой связью, на фиг. 2 - структура адаптивного регулятора.
Устройство содержит асинхронный двигатель 1, соединенный через упругую передачу с исполнительным механизмом 2, последовательно соединенные между собой регулятор 3 скорости, преобразователь 4 координат и преобразователь 5 энергии, выход которого подключен к статорной обмотке двигателя 1, датчик угла 6, механически связанный с ротором электродвигателя 1, задатчик 7 реактивного тока, выход которого подключен к соответствующему входу преобразователя 4 и первому входу формирователя 8 частоты токов ротора, второй вход которого связан с выходом регулятора 3, а выход формирователя 8 соединен с соответствующим входом преобразователя 4, формирователь 9 синусоидальных сигналов, выходы которого подключены ко входам опорных сигналов преобразователя 4.
Формирователь 10 сигналов обратной связи по скорости и перемещению содержит умножитель 11 частоты и цифроаналоговый преобразователь 12. Вход умножителя 11 подключен к датчику 6, а выходы связаны с соответствующими входами преобразователей 4 и 12. Выход преобразователя 12 соединен со входом регулятора 3.
Три входа адаптивного регулятора 13 связаны с датчиками 14, 15, 16 токов фаз статора двигателя 1, четвертый вход подключен к выходу умножителя 11, а выход соединен со входом регулятора 3. Выходы генератора 17 опорных сигналов связаны с соответствующими входами преобразователя 4, формирователей 8, 9 и умножителя 11.
Адаптивный регулятор 13 содержит (фиг. 2) общую шину (ОШ), к которой подключены микропроцессор 18, оперативное запоминающее устройство 19, постоянное запоминающее устройство 20, селектор 21 адреса и приемопередатчик 22 данных, к выходной шине которого подключены регистры 23 и 24 данных, последовательно соединенные мультиплексор 25 аналоговых сигналов, аналого-цифровой преобразователь 26 и устройство 27 ввода цифровых сигналов, выход которого соединен со входной шиной приемопередатчика 22, цифроаналоговый преобразователь 28, подключенный к выходу регистра 23, а также счетчик 29, вход которого соединен с выходом формирователя 10 сигналов обратной связи, а выход подключен ко второму входу устройства 27 ввода.
Выход преобразователя 28 соединен со входом регулятора 3 скорости электропривода. Выходы селектора 21 соединены с разрешающими входами регистров 23 и 24 и адресным входом устройства 27 ввода. Три входа мультиплексора 25 связаны с датчиками 14, 15, 16 токов фаз статора асинхронного двигателя, а адресные входы - с выходом регистра 24.
Устройство работает следующим образом.
Сигнал Ud задания реактивного тока статора формируется задатчиком 7. Сигнал Uq задания активного тока статора определяется разностью сигнала Uзс задания скорости и сигнала Uocl обратной связи по скорости ротора, а также сигналом адаптации Uа.
Сигнал задания амплитуды тока статора определяется выражением:
где A - коэффициент пропорциональности.
Частота тока статора
fm=fск± fω1, (5)
где fск - частота токов ротора на выходе формирователя 8, пропорциональная сигналу Uq;
fω1 - дополнительная частота, пропорциональная частоте ω1 вращения ротора и формируемая умножителем 11.
На выходе преобразователя 4 формируются сигналы Ialз, Iblз, Iclз, выполняющие роль сигналов задания фазных токов статора. Эти сигналы поступают на вход преобразователя 5, который питает статор токами Ial, Ibl, Icl заданных амплитуды Uзm и частоты fm.
С датчиков токов фаз статора двигателя 1 и умножителя 11 поступают соответственно информация о токах Ial, Ibl, Icl и дополнительная частота fω1 на соответствующие входы адаптивного регулятора 13. Регулятор 13 работает следующим образом.
Микропроцессор 18 в каждом цикле обмена информацией выдает адрес А на общую шину и далее по управляющим сигналам Вывод и Ввод обеспечивается обмен данными Д между микропроцессором 18 и тем блоком адаптивного регулятора 13, работа которого разрешается селектором 21 в соответствии с адресом А. Оперативное запоминающее устройство 19 служит для хранения расчетных данных, постоянное запоминающее устройство 20 - для хранения операционной системы и управляющей программы.
По управляющему сигналу Вывод в регистр 24 записывается код, в соответствии с которым на вход преобразователя 26 поступает аналоговый сигнал с датчика тока Ial. По управляющему сигналу Ввод цифровой код с выхода преобразователя 26, пропорциональный сигналу Ial, через устройство 27 ввода и приемепередатчик 22 поступает в микропроцессор 18. Далее аналогичные циклы обмена Вывод и Ввод позволяют микропроцессору получить информацию о текущих значениях токов Ibl, Icl.
На вход счетчика 29 поступают импульсы частотой fω1 с формирователя 10 сигналов обратной связи. На выходе счетчика 29 вырабатывается цифровой код, пропорциональный текущему перемещению Φ1 ротора двигателя 1. По адресному сигналу с выхода селектора 21 и управляющему сигналу Ввод код перемещения через устройство 27 ввода и приемепередатчик 22 поступает в микропроцессор 18.
Микропроцессор 18 на основе полученной информации о перемещении Φ1 ротора и фазных токах Ial, Ibl, Icl вычисляет текущие значения момента Мд асинхронного двигателя 1, угла Φ2 поворота и частоты ω2 вращения исполнительного механизма 2, упругого момента Му, а также сигнала адаптации Uа в соответствии с выражениями:
M∂ = ∂Wэм/∂Φ1;


Uа=-k1•Mу, (3)
где M∂ момент асинхронного двигателя 1;
Wэм - электромагнитная энергия обмоток двигателя 1;
Φ1,Φ2 - углы поворота ротора двигателя 1 и механизма 2;
n - число обмоток;
Ψj, lj - потокосцепление и ток j-ой обмотки;
lj(2) Ψ
Lj,k - взаимная индуктивность j-ой и k-ой обмоток;
Ik - ток k-ой обмотки;
Му - упругий момент;
c - жесткость упругой передачи;
ω1,ω2 - частоты вращения ротора двигателя 1 и механизма 2;
J1,J2 - моменты инерции ротора двигателя 1 и механизма 2;
Uа - сигнал адаптации;
k1- коэффициент пропорциональности.
Полученный в результате расчета цифровой код, соответствующий сигналу адаптации Uа, по разрешающему сигналу с селектора 21 и управляющему сигналу Вывод записывается в регистр 23, поступает на цифроаналоговый преобразователь 28 и преобразуется в аналоговый сигнал адаптации Uа, который поступает на вход регулятора 3, что обеспечивает замыкание отрицательной обратной связи по упругому моменту Mу.
Обратная связь по моменту Mу действует следующим образом. При положительном сигнале Uзс, задания скорости появление момента Mу положительной полярности означает, что исполнительный механизм из-за упругой связи отстает от двигателя. Для выравнивания углов Φ1,Φ2 необходимо снизить скорость ω1; задание на уменьшение скорости Δωl обеспечивается автоматически прямо пропорциональным величине Mу благодаря наличию соответствующей отрицательной обратной связи по упругому моменту в виде сигнала адаптации Uа.
Аналогично действует обратная связь по моменту при всех других сочетаниях полярностей сигналов Uзс и Mу - в направлении выравнивания углов Φ1 , Φ2 и соответственно стабилизации сигнала Mу как в статических, так и динамических режимах работы. За счет этого обеспечивается демпфирование колебаний частоты ω1 вращения ротора асинхронного двигателя и скорости ω2 исполнительного механизма.
Предлагаемое техническое решение обеспечивает улучшение динамических показателей, обусловленное демпфированием упругих колебаний электропривода, позволяет уменьшить время переходных процессов при пуске, торможении, реверсе.
Эффективность использования предлагаемого технического решения обуславливается повышением производительности машин и механизмов с упругими связями, оснащенных асинхронными двигателями, за счет уменьшения времени переходных процессов в динамических режимах работы, а также повышением качества выпускаемой продукции за счет уменьшения колебательности рабочих органов в статическом режиме.
Источник информации
1. А. с. СССР N 1054863, кл. H 02 P 5/34, H 02 P 7/42. Опубл. в БИ N 42 15.11.83.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1994 |
|
RU2082277C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
Устройство может быть использовано для регулирования скорости станков, вентиляторов и других машин и механизмов, оснащенных асинхронными двигателями. В устройство для управления асинхронным электроприводом введен адаптивный регулятор, содержащий общую шину, к которой подключены микропроцессор, оперативное запоминающее устройство, постоянное запоминающее устройство, селектор адреса и приемопередатчик данных, к выходной шине которого подключены два регистра данных, последовательно соединенные мультиплексор аналоговых сигналов, аналого-цифровой преобразователь и устройство ввода цифровых сигналов, выход которого соединен с входной шиной приемопередатчика, цифроаналоговый преобразователь, подключенный к выходу первого регистра, а также счетчик, вход которого соединен с выходом формирователя сигналов обратной связи, а выход подключен к второму входу устройства ввода цифровых сигналов, выход цифроаналогового преобразователя соединен с входом регулятора скорости, выходы селектора адреса - с разрешающими входами регистров и адресным входом устройства ввода цифровых сигналов, входы мультиплексора аналоговых сигналов связаны с датчиками токов фаз асинхронного двигателя, а адресные входы - с выходом второго регистра. Технический результат заключается в улучшении динамических показателей электропривода за счет демпфирования упругих колебаний. 2 ил.
Устройство для управления асинхронным электроприводом, содержащее асинхронный двигатель, соединенный через упругую передачу с исполнительным механизмом, последовательно соединенные между собой регулятор скорости, преобразователь координат и преобразователь энергии, выход которого подключен к статорной обмотке асинхронного двигателя, датчик угла, механически связанный с ротором асинхронного электродвигателя, задатчик реактивного тока, выход которого подключен к соответствующему входу преобразователя координат и первому входу формирователя частоты токов ротора, второй вход которого связан с выходом регулятора скорости, а выход формирователя частоты токов ротора соединен с соответствующим входом преобразователя координат, формирователь синусоидальных сигналов, выходы которого подключены к входам опорных сигналов преобразователя координат, формирователь сигналов обратной связи по скорости и перемещению, вход которого подключен к датчику угла, а выходы связаны с соответствующими входами регулятора скорости и преобразователя координат, а также генератор опорных сигналов, выходы которого связаны с соответствующими входами преобразователя координат, формирователя частоты токов ротора, формирователя синусоидальных сигналов и формирователя сигналов обратной связи по скорости и перемещению, отличающееся тем, что введен адаптивный регулятор, содержащий общую шину, к которой подключены
микропроцессор, вычисляющий на основе информации о перемещении ротора и фазных токах статора текущие значения момента асинхронного двигателя, угла поворота и частоты вращения исполнительного механизма, упругого момента, а также сигнала адаптации, оперативное запоминающее устройство, селектор адреса и приемопередатчик данных, к выходной шине которого подключены два регистра данных, последовательно соединенные мультиплексор аналоговых сигналов, аналого-цифровой преобразователь и устройство ввода цифровых сигналов, выход которого соединен с входной шиной приемопередатчика, цифроаналоговый преобразователь, подключенный к выходу первого регистра, а также счетчик, вход которого соединен с выходом формирователя сигналов обратной связи, а выход подключен к второму входу устройства ввода цифровых сигналов, выход цифроаналогового преобразователя соединен с входом регулятора скорости, выходы селектора адреса - с разрешающими входами регистров и адресным входом устройства ввода цифровых сигналов, три входа мультиплексора аналоговых сигналов связаны с датчиками токов фаз статора асинхронного двигателя, а адресные входы - с выходом второго регистра.
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU612375A1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| Электропривод переменного тока | 1988 |
|
SU1552335A1 |
| ДАТЧИК ПОГРУЖНОГО ТИПА | 0 |
|
SU243960A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО РЕГУЛИРОВАНИЯ ТЕМНЕРАТУРЫ ЭЛЕКТРОПЕЧИ | 0 |
|
SU175154A1 |
