Изобретение относится к средствам регулирования технологических процессов, конкретнее, к регуляторам натяжения длинномерных материалов.
Известен регулятор натяжения, содержащий датчик и задатчик натяжения, через блок сравнения подключенные к первому входу блока управления, выходом электрически связаиного с электродвипателем, вал которого кинем.атически соединен с исполнительным механизмом 1.
Однако известное устройство имеет невысокую точность регулирования величины натяжения, т. к. в нем не учитывается изменение зависимости момента сопротивления на валу управляемого двигателя от натяжения при различных углах охвата гибким материалом поверхности исполнительного механизМ-а.
Цель изобретения - повышение точности регулирования натяжения.
Цель достигается тем, что регулятор, содержащий датчик и задатчнк натяжения, через блок ср авнения подключенные к первому входу блока управления, выходом электрически связанного с электродвигателем, в-ал которого кинематически соединен с исполнительным механизмом, снабжен датчиком и задатчиком угла поворота исполнительного механизма и дополнительным блоком сравнения, при этом выходы датчика и задатчика угла поворота исполнительного механизма через дополнительный блок сравнения соединены со вторым входом блока управления.
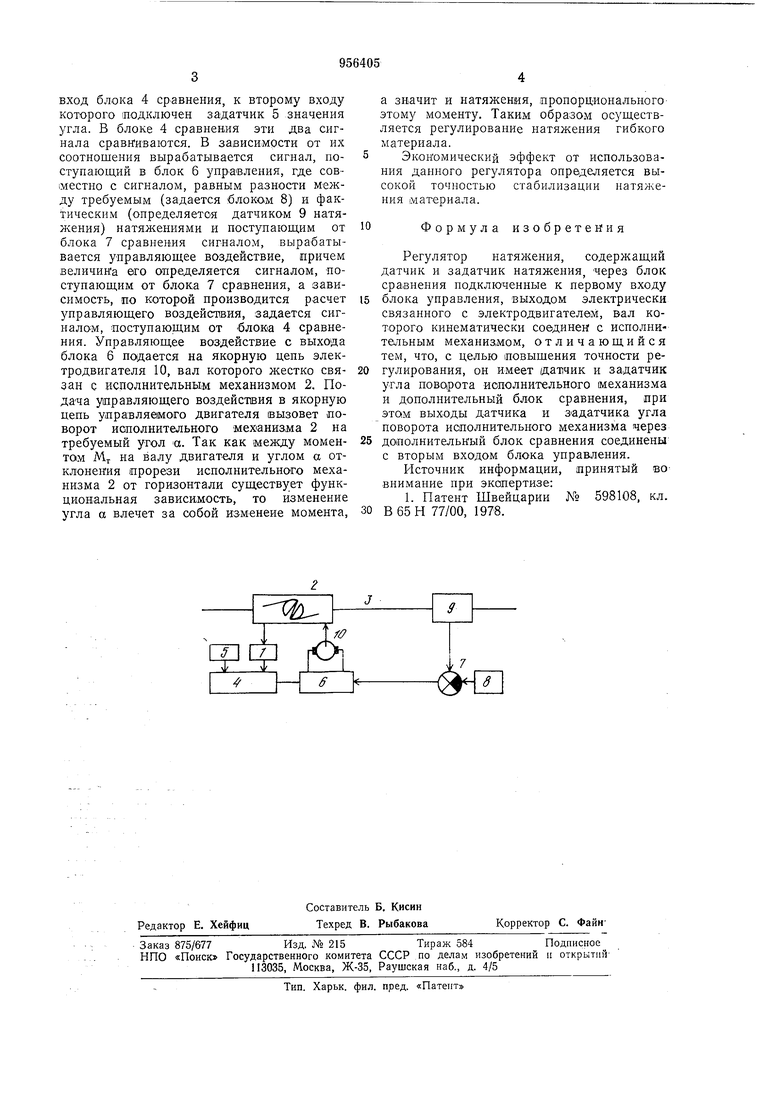
На чертеже представлена структурная схема устройства.
Регулятор натяжения содержит датчик 1 угла поворота, связ анный с исполни10тельным .механизмом 2, регулирующим натяжение гибкого материала 3. Выход датчика 1 угда поворота подключен к одному из входов блока 4 сравнения, к второму входу которого подключен задатчик 5 5 угла поворота. Выход блока 4 сравнения подсоединен к первому входу блока 6 управления, второй вход которого связан с блоком 7 сравнения, к которому подключены задатчик 8 и датчик 9 н-атя20жения. Выход блока 6 упра вления подсоединен к электродвигателю 10, на валу которого лтестко закреплен исполнительный механизм 2.
Устройство работает следующим обра25зом.
С вала исполнительного механизма 2 при помощи датчика 1 угла поворота снимается сигнал, пропорциональный углу отклонения прорези исполнительного меха30низма от горизонтали, и подается на один
вход блока 4 ср авнения, к второму входу которого подключен задатчик 5 значения угла. В блоке 4 сравнения эти два сигнала сравниваются. В зависимости от их соотношения вырабатывается сигнал, поступающий в блок 6 упр авления, где совiMecTHo с сигналом, равным разности между требуемым (задается блоком 8) и фактическим (определяется датчиком 9 натяжения) натяжениями и поступающим от блока 7 сравнения сигналом, вырабатывается управляющее воздействие, причем величина его определяется сигналом, поступающим от блока 7 сравнения, а зависимость, по которой производится р-асчет управляющего воздействия, задается сигналом, поступающим от блока 4 сравнения. Управляющее воздействие с выхода блока 6 подается на якорную цепь электродвигателя 10, вал которого жестко связан с исполнительным механизмом 2. Подача управляющего воздействия в якорную цепь управляемого двигателя вызовет поворот исполнительного механизма 2 на требуемый угол а. Так как между моментом MT на валу двигателя и углом а отклонения прорези исполнительного механизма 2 от горизонтали существует функциональная зависимость, то изменение угла а влечет за собой иэменеие момента.
а значит и натяжения, пропорционального этому моменту. Таким образом осуществляется регулирование натяжения гибкого материала.
Экономический эффект от использования данного регулятора определяется высокой точностью стабилизации натяжения материала.
Формула изобретения
Регулятор натяжения, содержащий датчик и задатчик натяжения, через блок сравнения подключенные к первому входу
блока управления, выходом электрически связанного с электродвигателем, вал которого кинематически соединен с исполнительным механизмом, отличающийся тем, что, с целью повышения точности регулирования, он имеет датчик и задатчик угла поворота исполнительного механизма и дополнительный блок сравнения, при этом выходы датчика и задатчика угла поворота исполнительного механизма через
дополнительный блок сравнения соединены с вторым входом блока управления.
РГсточник информации, принятый во внимание при экспертизе:
1. Патент Швейцарии Л 598108, кл.
В 65 Н 77/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор натяжения | 1981 |
|
SU979251A1 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ | 1999 |
|
RU2142400C1 |
| Устройство для регулирования натяжения ленточного материала | 1982 |
|
SU1101400A1 |
| Система регулирования натяжения к устройству для намотки длинномерного материала | 1981 |
|
SU973465A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Устройство управления позиционнымэлЕКТРОпРиВОдОМ | 1979 |
|
SU798695A1 |
| Многодвигательный электропривод постоянного тока | 1969 |
|
SU560311A1 |
| Устройство для регулирования натяжения длинномерного материала | 1985 |
|
SU1313795A1 |
| Стабилизированный вентильный электропривод | 1987 |
|
SU1467726A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
