Изобретение относится с спутниковым радионавигационным системам и может быть использовано для определения местоположения одного движущегося объекта относительно другого с сантиметровой точностью.
В спутниковых радионавигационных системах, например GPS или NAVSTAR (И. Н. Мищенко, А.И.Волынин, П.С.Волосов и др. Глобальная навигационная система NAVSTAR. Зарубежная радиоэлектроника, 1980, N 8, с. 52-83), ГЛОНАСС (Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Координационный научно-информационный центр Военно-Космических Сил России, М., 1995), используется совокупность сигналов, излучаемых одновременно несколькими спутниками. Каждый из этих сигналов промодулирован псевдослучайной последовательностью (ПСП), известной на приемной стороне, что позволяет определить момент времени по шкале приемника, соответствующий определенной фазе ПСП, например ее началу. Сигнал каждого спутника промодулирован также битами навигационного сообщения, содержащего, наряду с параметрами орбиты спутника, специальный код преамбулы, обнаружение которого позволяет определить так называемую псевдозадержку. Псевдозадержка равна разности между показаниями часов приемника в момент приема сигнала и показаниями часов спутника в момент его излучения.
Псевдодальность до спутника определяется как произведение псевдозадержки на скорость света. После определения псевдодальностей не менее чем до четырех спутников составляется система уравнений:
ρj = Rj(x,y,z)+CΔt, j = 1,...,N, (1)
где (x, y, z) - координаты антенны приемника;
Rj() - расстояние до j-го спутника, вычисляемое исходя из полученных в навигационном сообщении параметров орбиты (эфемерид) спутника;
C - скорость света;
Δt - неизвестная величина, одинаковая для всех спутников.
Если N≥4, из системы уравнений (1) можно определить местоположение антенны приемника (x, y, z), а также Δt. На практике измерения псевдодальностей получаются со случайными ошибками, которые приводят к ошибкам в координатах (x, y, z) порядка 100-150 м для GPS и 20-30 м для ГЛОНАСС.
Для повышения точности определения координат применяется так называемый дифференциальный режим, при котором используются два навигационных приемника, один из которых называется базовым с известными координатами (xв, yв, zв), а другой - подвижным, причем задача определения местоположения состоит в определении координат базовой линии, т.е. относительных координат подвижного приемника относительно базового. Для этого формируются первые разности псевдодальностей двух приемников Δρj, которые связаны с относительными координатами подвижного приемника следующим образом:
Δρj = ΔRj(x,y,z)+CΔt, j = 1,...,N, (2)
где ΔRj(x,y,z) = Rj(xв+x,yв+y,zв+z)-Rj(xв,yв,zв) - разность геометрических дальностей от антенн приемников до j-го спутника;
Δt - неизвестная величина, одинаковая для всех спутников.
Известно, что ошибки измерений разности псевдодальности (2) существенно меньше, чем ошибки измерений самих псевдодальностей (1). Благодаря этому точность относительных местоопределений, осуществляемых путем решения системы уравнений (2), гораздо выше, чем абсолютных, и составляет 2-5 м как для GPS, так и для ГЛОНАСС.
Еще более высокие точности (порядка 1 см) могут быть достигнуты путем совместной обработки измерений псевдодоплеровской фазы, получаемых от подвижного и базового приемника. Уравнения для первых разностей псевдодоплеровской фазы имеют вид:
где λj - длина волны сигнала j-го спутника;
Δt и δ - неизвестные величины, одинаковые для всех спутников ГЛОНАСС; для спутников GPS δ = 0;
Mj - смещение в целое число циклов фазы.
Поскольку измерения разностей фаз (3) могут осуществляться с точностью 0.02-0.05 цикла, а длина волны в системах GPS и ГЛОНАСС составляет около 20 см, точность определения местоположения по уравнениям (3) составляет около 1 см.
Однако для этого необходимо определить неизвестное целое число циклов Mj, являющееся следствием неоднозначности фазовых измерений (3). В случае движущегося приемника, когда координаты (x, y, z) могут быстро меняться во времени, единственным способом разрешения фазовой неоднозначности является привлечение избыточного числа измерений разности фаз, т.е. N>4, а также измерений разностей псевдодальностей. По существу все методы разрешения неоднозначности основаны на минимизации некоторой квадратичной формы от неизвестных целочисленных переменных Mj:
R = (ν-M)T•Q•(ν-M), (4)
где M = (Mj) - вектор с целочисленными координатами;
Q - матрица квадратичной формы;
ν = (νj) - вектор действительных чисел, рассчитываемый из априорных данных и измерений псевдодальностей и фазы.
Случайные ошибки фазовых измерений могут приводить к ошибочному определению целочисленного вектора неоднозначностей M, что в свою очередь вызывает появление аномальных (порядка нескольких метров) ошибок координат (x, y, z). Для борьбы с аномальными ошибками необходимо увеличивать число независимых измерений фазы N. Для этого используются различные методы, например, совместная обработка измерений двух систем: GPS и ГЛОНАСС, работа на двух частотах L1 и L2 и другие.
Дополнительную сложность вызывает тот факт, что применение различных методов фильтрации во времени для уменьшения влияния ошибок фазовых измерений часто оказывается неэффективным из-за наличия так называемых "скачков фазы". Они состоят в том, что Mj одного и того же спутника даже в близкие, но разные моменты времени могут отличаться на произвольное целое число. Поэтому для достижения устойчивости к скачкам фазы разрешение фазовой неоднозначности делается в каждый момент времени независимо от других, т.е. применяется так называемый одномоментный метод местоопределения.
Наиболее близким по структуре к устройству в данном изобретении является навигационная приемная система высокоточного позиционирования (сантиметровая точность) в кинематическом режиме реального времени (патент США N 5,519,620), содержащая базовый навигационный GPS приемник со средствами измерения псевдодальностей и псевдодоплеровских фаз, линию передачи данных для передачи измерений псевдодальности и псевдодоплеровских фаз вместе с показаниями часов базового приемника на момент измерения, подвижный навигационный приемник со средствами измерения псевдодальностей и псевдодоплеровских фаз, блок формирования двойных разностей псевдодальностей и псевдодоплеровских фаз, блок разрешения неоднозначностей со средствами поиска целочисленного вектора и специализированный компьютер для решения системы навигационных уравнений с учетом найденных целочисленных векторов неоднозначностей.
Однако эта система, выбранная в качестве прототипа, не обеспечивает высокой надежности разрешения фазовой неоднозначности и как следствие не обеспечивает достаточно высокой достоверности оценок координат при повышенных ошибках измерения псевдодоплеровской фазы, что часто встречается на практике из-за влияния многолучевости, ионосферных, тропосферных и других источников ошибок.
Целью предлагаемого изобретения является повышение надежности разрешения фазовой неоднозначности за счет использования дополнительной избыточности, имеющейся в последовательности фазовых измерений, выполняемых в близкие моменты времени. При этом сохраняется абсолютная устойчивость к скачкам фазы, характерная для одномоментных местоопределений.
Указанная цель достигается тем, что в отличие от прототипа в систему дополнительно вводится подсистема слежения за несколькими потенциальными траекториями подвижного навигационного приемника, построенными на основе использования нескольких наиболее правдоподобных целочисленных векторов неоднозначностей Mi j в ряде соседних по времени моментов измерения ti.
Принцип слежения за несколькими траекториями поясняется на фиг. 1.
В момент времени t0 имеется несколько потенциальных траекторий, которые могут быть получены, например, таким же методом, как в прототипе, причем вектор скорости определяется путем решения системы уравнений, получаемых из (2) дифференцированием по времени. Экстраполяция этих траекторий на момент времени t1 порождает области неопределенности положения, условно показанные в виде эллипсов на фиг. 1. Каждая такая область характеризуется своим центром, зависящим от параметров соответствующей траектории и одинаковой для всех траекторий матрицей квадратичной формы Q1, определяющей размеры и ориентацию эллипсов.
После получения измерений разностей фаз в момент времени ti для каждого экстраполированного центра эллипса отбираются несколько наиболее правдоподобных новых точек, получаемых при разных целочисленных векторах M1. Правдоподобие точки или, что то же самое, целочисленного вектора рассчитывается по величине остаточной суммы (4), взятой с обратным знаком, где ν - разность между вектором измерений первых разностей фаз и вектором расчетных разностей фаз, соответствующих значению координат рассматриваемой траектории в момент времени t1. Таким образом, решается задача одномоментного разрешения неоднозначности путем минимизации квадратичной формы (4), расширенная в том смысле, что отыскиваются Км последовательно нарастающих минимумов. Каждый из найденных векторов неоднозначности M11, M12,..., M2N определяет некоторое продолжение траектории. Для предотвращения экспоненциального роста числа потенциальных траекторий со временем на каждом шаге, в том числе на t1, выбираются Ntr наиболее правдоподобных траекторий. Правдоподобие траектории оценивается через линейную комбинацию правдоподобия траектории, рассчитанного на момент времени t0 и правдоподобия точки, отобранной к траектории в момент времени t1.
Каждая из полученных траекторий экстраполируется на момент t2 и весь процесс повторяется для этого момента времени, затем для момента времени t3 и т.д.
Таким образом, за счет слежения сразу за несколькими потенциальными траекториями повышается вероятность правильного разрешения неоднозначности. Если в момент времени t0 правдоподобие истинной точки не является наибольшим, в результате чего происходит ошибочное разрешение неоднозначности, то в последующие моменты времени эта ситуация исправляется, так как ошибки измерения сглаживаются с течением времени, а в среднем правдоподобие истинного вектора неоднозначностей является максимальным.
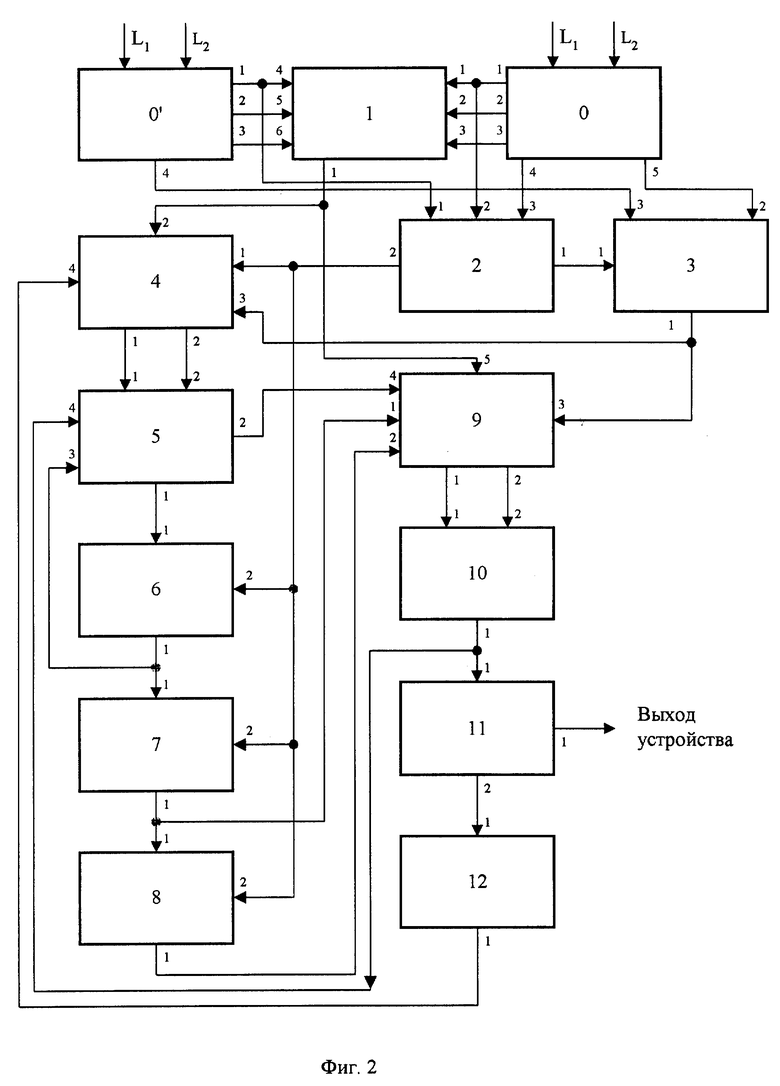
Укрупненная структурная схема предлагаемого устройства приведена на фиг. 2, где:
0 - базовый навигационный приемник;
0' - подвижной навигационный приемник;
1 - блок формирования грубой оценки базы (ГОБ);
2 - блок формирования дальностей и направления на спутники (ДНС);
3 - блок формирования невязок первых разностей фаз (НПРФ);
4 - блок инициализации фильтра;
5 - блок экстраполяции;
6 - блок формирования ковариационной матрицы сглаженных параметров (ИМСП);
7 - блок формирования коэффициента усиления;
8 - блок формирования коэффициентов квадратичной формы (ККФ);
9 - блок расщепления и сглаживания траекторий;
10 - блок выбора лучших (наиболее правдоподобных) траекторий;
11 - блок выбора наилучшей траектории;
12 - пороговый блок.
Навигационные приемники выполнены по схеме прототипа [(патент США 5,519,620); Int.CL G 01 S 3/02; US CL 364/449].
Получаемые на выходах навигационных приемников значения грубых координат (xyz)d, (xyz)b поступают соответственно на 1-й и 4-й входы блока формирования ГОБ, векторы скорости (Vx Vy Vz)d, (Vx Vy Vz)b поступают соответственно на 2-й и 5-й входы блока формирования ГОБ. На 3-й и 6-й входы этого же блока поступают и временные параметры: поправки часов навигационных приемников τd, τb и скорости их ухода Vτd, Vτb соответственно с выхода 3 базового навигационного приемника и с выхода 3 подвижного навигационного приемника. Все перечисленные параметры представлены в цифровой форме.
В блоке формирования ГОБ, выполненном в виде арифметико-логического устройства (АЛУ), путем выполнения операций вычитания формируются оценки координат подвижного навигационного приемника его скоростей Vx, Vy, Vz и временных параметров - разности хода часов и разности скоростей их ухода. Совокупность этих параметров, называемая ГОБ, образует вектор параметров:
где T - знак транспонирования.
Эти параметры формируются по правилу:
X = xd - xb,
Y = yd - yb,
Z = zd - zb,
VX = Vxd - Vxb,
VY = Vyd - Vyb,
Vz = Vzd - Vzb,
τ = τd-τb,
Vτ= Vτd-Vτb.
Получаемые на первых выходах подвижного и базового навигационных приемников поступают соответственно на первый и второй входы блока формирования ДНС, на третий вход которого поступают координаты спутников (так называемые эфемериды спутников), сформированные в цифровой форме базовым навигационным приемником в моменты измерения ti: (xsj, ysj, zsj), j=1..Ns, где Ns - число спутников N в системе. В блоке формирования ДНС, выполненном в виде АЛУ, путем выполнения операций вычитания, умножения, сложения и извлечения квадратного корня формируются разности расстояний от спутников sj до базового и подвижного навигационных приемников в грубой точке:
Δrj = rdj-rbj,
где:

Кроме того, в том же блоке путем выполнения операций вычитания и деления формируются коэффициенты матрицы направлений на спутники из грубой точки:

Кроме того, в этом же блоке формируются коэффициенты полной матрицы фазовых измерений Hi. Это блочная матрица, состоящая из ранее сформированной матрицы Hx и столбца постоянных коэффициентов:
где λj/ - постоянный коэффициент, равный длине волны сигнала j-го спутника,
c - скорость света в вакууме.
Значения разностей дальностей, сформированные в блоке формирования ДНС, в цифровой форме подаются на первый вход блока формирования HПРФ, на второй и третий входы которого в цифровой форме подаются измерения псевдодоплеровских фаз соответственно от базового и подвижного навигационных приемников. В блоке формирования невязок первых разностей фаз, выполненном в виде АЛУ, путем выполнения операций вычитания, умножения, деления и сложения формируются следующие невязки:
νj = ϕdj-ϕdj-Δrj/λj-c(τd-τb)/λj
Вектор грубых параметров, получаемый на выходе блока формирования грубой оценки базы подается на второй вход блока инициализации фильтра. Кроме того, на 1-й вход этого блока в цифровой форме подаются коэффициенты матрицы направлений на спутники с выхода блока формирования ДНС, на его 3-й вход - невязки первых разностей фаз с выхода блока формирования НПРФ.
В блоке инициализации фильтра, устройство которого будет подробно описано ниже, формируются начальные точные параметры Ntr потенциальных траекторий на момент времени t0:  k = 1..Ntr (T - знак транспонирования), которые подаются на первый вход блока экстраполяции, а также коэффициенты начальной ковариационной матрицы параметров траекторий P0, которые также подаются на 2-й вход блока экстраполяции.
k = 1..Ntr (T - знак транспонирования), которые подаются на первый вход блока экстраполяции, а также коэффициенты начальной ковариационной матрицы параметров траекторий P0, которые также подаются на 2-й вход блока экстраполяции.
В блоке экстраполяции, который выполнен в виде арифметико-логического устройства (АЛУ), для каждой из полученных ранее Ntr потенциальных траекторий на момент времени ti формируются экстраполированные значения координат
путем суммирования соответствующих значений координат с произведениями компонент скорости на интервал времени между i-м и (i+1)-м измерениями, т.е. :
где Δt = ti+1 - ti.
Кроме того, в блоке экстраполяции из полученной ранее ковариационной матрицы параметров траекторий Pi на момент ti формируется ковариационная матрица экстраполированных параметров путем выполнения операций умножения и сложения по следующему правилу:
где
I - единичная матрица (3х3), т.е. 
Δt = ti+1-ti,
w1, w2 - постоянные коэффициенты, значения которых выбраны исходя из сведений о возможной динамике движения навигационного подвижного приемника и разности хода часов навигационного подвижного и базового приемников: w1 = 0,1; w2 = 10.
Сформированные в блоке формирования дальностей и направлений на спутники значения коэффициентов полной матрицы фазовых измерений Hi в цифровой форме подаются на 2-й вход блока формирования ковариационной матрицы сглаженных параметров траекторий, на 1-й вход которого в цифровой форме подаются сформированные в блоке экстраполяции коэффициенты ковариационной матрицы экстраполированных параметров  на i-й момент времени. В блоке формирования ковариационной матрицы сглаженных параметров траекторий, выполненном в виде АЛУ, осуществляются операции умножения и сложения, а также операции обращения матриц по следующему правилу:
на i-й момент времени. В блоке формирования ковариационной матрицы сглаженных параметров траекторий, выполненном в виде АЛУ, осуществляются операции умножения и сложения, а также операции обращения матриц по следующему правилу:
где a - постоянный коэффициент, установленный исходя из значения ошибки измерения фазы в приемниках: a = 1/σ2 = 1/0,052 = 400,
символ (. )-1 означает операцию инвертирования матрицы, которая выполняется известным методом LU-декомпозиции,
Сформированные коэффициенты ковариационной матрицы сглаженных параметров Pi+1 подаются в цифровой форме обратно на 3-й вход блока экстраполяции для использования в следующем моменте измерения ti+2, а также на 2-й вход блока формирования коэффициентов усиления для использования в текущем моменте измерения ti+1. В блоке формирования коэффициентов усиления, выполненном в виде АЛУ, осуществляются операции умножения и сложения по следующему правилу:
Gi = aPi+1Hi T
Сформированные коэффициенты усиления Gi подаются на 1-й вход блока формирования коэффициентов квадратичной формы, на 2-й вход которого подаются в цифровом виде коэффициенты матрицы направлений на спутники Hx. В блоке формирования коэффициентов квадратичной формы, выполненном в виде АЛУ, путем выполнения операций умножения, сложения и вычитания формируются коэффициенты квадратичной формы по правилу:
Q = a(I-HiGi)
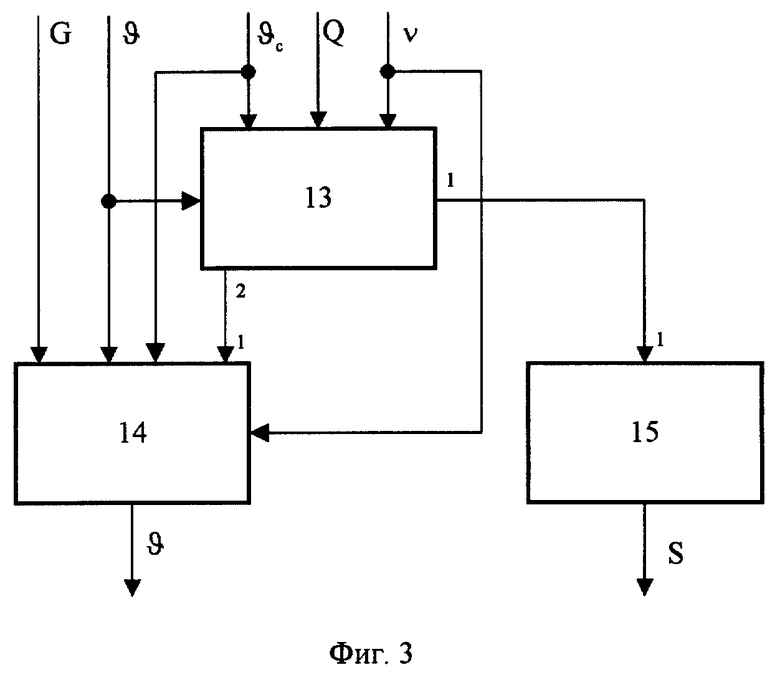
Сформированные коэффициенты квадратичной формы подаются на 2-й вход блока расщепления и сглаживания траекторий, на 1-й вход которого подаются в цифровой форме коэффициенты усиления из блока формирования коэффициентов усиления, на третий вход подаются в цифровой форме значения невязок первых разностей фаз из блока формирования невязок первых разностей фаз, а на четвертый вход подаются экстраполированные параметры потенциальных траекторий из блока экстраполяции. Схема блока расщепления и сглаживания траекторий представлена на фиг.3, где:
13 - блок целочисленной минимизации;
14 - блок коррекции параметров;
15 - блок оценки качества траекторий.
На Q вход блока целочисленной минимизации подаются в цифровой форме коэффициенты квадратичной формы Q от блока формирования ККФ, на его ν-й вход подаются значения невязок первых разностей фаз с выхода блока формирования НПРФ, на его ϑc вход подаются экстрополированные координаты потенциальных траекторий со второго выхода блока экстраполяции, на ϑ вход подается вектор грубых параметров. В блоке целочисленной минимизации, выполненном в виде АЛУ, выполняются операции поиска целочисленного минимума квадратичной формы с коэффициентами Q. Другими словами, отыскиваются N векторов M1,..,MN с целочисленными координатами Mp = [m1 m2...  ], соответствующих N последовательно нарастающим минимумам квадратичной формы
], соответствующих N последовательно нарастающим минимумам квадратичной формы
В частности, при Ns = 2 квадратичная форма имеет вид:
где μj - компоненты вектора  , а возможные значения целочисленных векторов перечислены ниже:
, а возможные значения целочисленных векторов перечислены ниже:
M = (0 0), (1 0), (-1 0), (0 1), (0 -1), (0 2), (0 -2), (2 0), (-2 0), (1 1), (-1 1), (1 -1), (-1 -1), (1 2), (1 -2), (-1 2), (-1 -2) и т.д.
Среди указанных целочисленных векторов отбирается такой вектор M1, который дает минимальное значение остаточной суммы S, затем вектор M2, который дает следующее по величине значение S, и так далее, пока не будут найдены N таких векторов.
Полученные для каждой из Ntr потенциальных траекторий N целочисленных векторов M1, . . , MN подаются в цифровой форме на 1-й вход блока коррекции параметров траекторий, на ν вход подаются значения невязок первых разностей фаз в экстраполированной точке μ, на G вход подаются коэффициенты усиления, полученные в блоке формирования коэффициентов усиления, на ϑc вход - экстраполированные параметры, полученные в блоке экстраполяции. В блоке коррекции параметров, выполненном в виде АЛУ, путем выполнения операций умножения, сложения и вычитания формируются сглаженные параметры каждой из Ntr экстраполированных траекторий для каждого из N найденных целочисленных векторов по правилу:
В блоке оценки качества траекторий, выполненном в виде АЛУ, путем выполнения операций умножения и сложения формируются оценки качества каждого из N х Ntr продолжений траекторий по следующему правилу:
Si+1 = α•Si+β•Si+1,
где Si - оценка качества, полученная для данной траектории в предыдущий момент времени ti,
Si+1 - значение остаточной суммы, полученное в блоке целочисленной минимизации для данной траектории и данного целочисленного вектора,
α = 0,9; β = 0,1 - постоянные коэффициенты.
Таким образом, в блоке расщепления и сглаживания траекторий каждая из Ntr потенциальных траекторий расщепляется на N продолжений, и для каждой из полученных N х Ntr траекторий формируется показатель качества Si. Чем меньше значение Si, тем выше качество траектории.
В блоке выбора Ntr лучших траекторий, выполненном в виде АЛУ, путем прямого перебора отбираются Ntr траекторий, имеющих наименьшее значение Si среди общего числа N х Ntr траекторий на его входе. Каждая из отобранных траекторий подается на 4-й вход блока экстраполяции для получения экстраполированных параметров на момент времени ti+2.
В блоке выбора наилучшей траектории, выполненном в виде АЛУ, путем прямого перебора выбирается одна наилучшая траектория, имеющая наименьшее значение Si среди всех потенциальных траекторий. Значения параметров этой траектории θ = (xyzVxVyVzτVτ) выдаются на выход системы потребителю. Кроме того, для выбранной наилучшей траектории в пороговом устройстве производится сравнение характеристики качества Si с порогом Sпор = 2,5•Ns. В случае превышения порога пороговое устройство вырабатывает сигнал, вызывающий инициализацию фильтра, который подается на его 4-й вход.
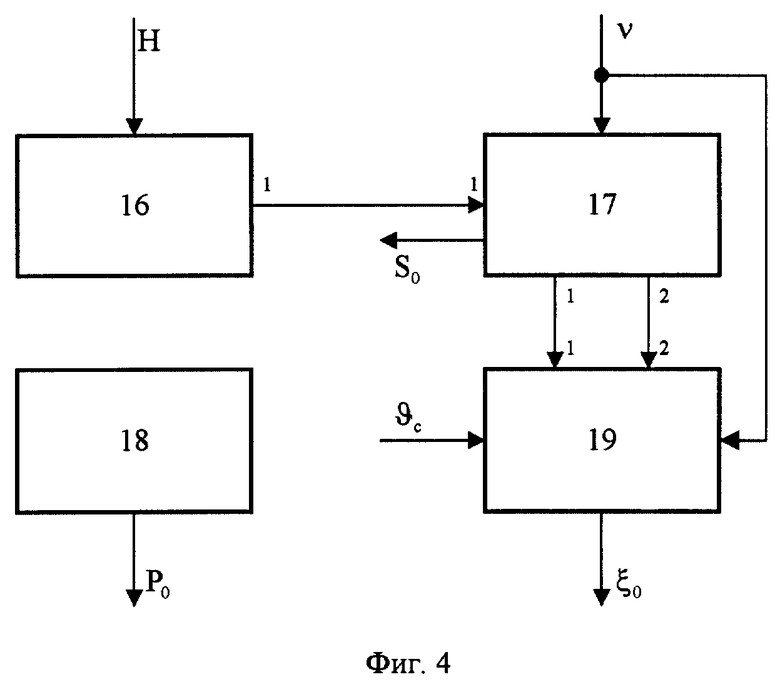
Блок инициализации фильтра состоит из блока формирования коэффициентов квадратичной формы в грубой точке, блока целочисленной минимизации, блока формирования начальных коэффициентов ковариационной матрицы параметров траекторий и блока формирования параметров потенциальных траекторий. Схема блока инициализации представлена на фиг. 4, где:
16 - блок формирования коэффициентов квадратичной формы в грубой точке;
17 - блок целочисленной минимизации;
18 - блок формирования начальной ковариационной матрицы;
19 - блок формирования параметров потенциальных траекторий.
В блоке формирования коэффициентов квадратичной формы в грубой точке, выполненном в виде АЛУ, путем выполнения операций умножения, сложения и обращения матриц, формируются коэффициенты квадратичной формы Q по cледующему правилу:
Q = γ1(I-V)T(I-V)+γ2VTV,
где I - единичная матрица размером Ns х Ns,
γ1 = 400; γ2 = 0,1 - постоянные коэффициенты, устанавливаемые как обратные значения дисперсий измерения фазы в приемниках (γ1) и координат грубой точки (γ2)
V = γ1Hx(γ1H
Матрица Hx берется как соответствующий блок матрицы Hi.
В блоке целочисленной минимизации, выполненном таким же образом, как блок целочисленной минимизации, входящий в состав блока расщепления и сглаживания, осуществляются операции поиска целочисленного минимума квадратичной формы с коэффициентами Q. Другими словами, отыскиваются N векторов М1, ..,MN с целочисленными координатами Mp = [m1 m2...  ], соответствующих N последовательно нарастающим минимумам квадратичной формы (ν-M)TQ(ν-M).
], соответствующих N последовательно нарастающим минимумам квадратичной формы (ν-M)TQ(ν-M).
В блоке формирования параметров потенциальных траекторий, выполненном в виде АЛУ путем выполнения операций умножения, сложения и вычитания формируются точные значения координат для каждого из N найденных целочисленных векторов по правилу:
W0 = Wc+V(ν-M),
где Wc = [X Y Z]T - грубые значения координат из вектора грубых параметров.
Далее в блоке формирования параметров потенциальных траекторий формируется полный вектор параметров путем добавления компонент скорости и разности хода часов, которые берутся из полученного на входе вектора грубых параметров:
В блоке инициализации ковариационной матрицы параметров, выполненном в виде АЛУ, формируются коэффициенты матрицы по следующему правилу:
где a1...a4 - постоянные коэффициенты, установленные исходя из сведений о дисперсиях измерений навигационных приемников:
a1 = 0,04; a2 = 1, a3= 0,01; a4 = 0,1,
I - единичная матрица размерности (3 х 3).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| Способ определения координат короткоживущего беспилотного летательного аппарата | 2020 |
|
RU2744723C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| РАЗРЕШЕНИЕ ЦЕЛОЧИСЛЕННОЙ НЕОДНОЗНАЧНОСТИ ФАЗЫ НЕСУЩЕЙ МЕТОДОМ ЧАСТИЧНОГО ПОИСКА | 2008 |
|
RU2476905C2 |
| ПРИЕМНИК СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2118054C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И СПОСОБ РАЗРЕШЕНИЯ ЦЕЛОЧИСЛЕННЫХ НЕОДНОЗНАЧНОСТЕЙ С ИСПОЛЬЗОВАНИЕМ ОГРАНИЧЕНИЯ НЕОДНОЗНАЧНОСТИ ДВОЙНОЙ РАЗНОСТИ | 2011 |
|
RU2591953C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛОСТНОСТИ ВЫСОКОТОЧНЫХ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ ПОТРЕБИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2577846C1 |
| Способ определения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем | 2016 |
|
RU2624268C1 |
Изобретение относится к спутниковым радионавигационным системам и может быть использовано для определения местоположения одного движущегося объекта относительно другого с сантиметровой точностью. В системе осуществляется формирование и слежение за несколькими потенциальными траекториями подвижного приемника. В начальный момент времени генерируются несколько траекторий, координаты которых получаются путем минимизации квадратичной формы, определяемой по коэффициентам линеаризованных измерений фазы. В последующие моменты времени осуществляется экстраполяция потенциальных траекторий, для каждой из них формируется показатель качества и для каждого момента измерений отбираются несколько лучших, а параметры наилучшей траектории передаются на выход потребителю. Технический результат, достигаемый при реализации данного изобретения состоит в повышении надежности разрешения фазовой неоднозначности за счет использования дополнительной избыточности, имеющейся в последовательности фазовых измерений, выполняемых в близкие моменты времени, причем сохраняется абсолютная устойчивость к скачкам фазы, характерная для одномоментных местоопределений. 4 ил.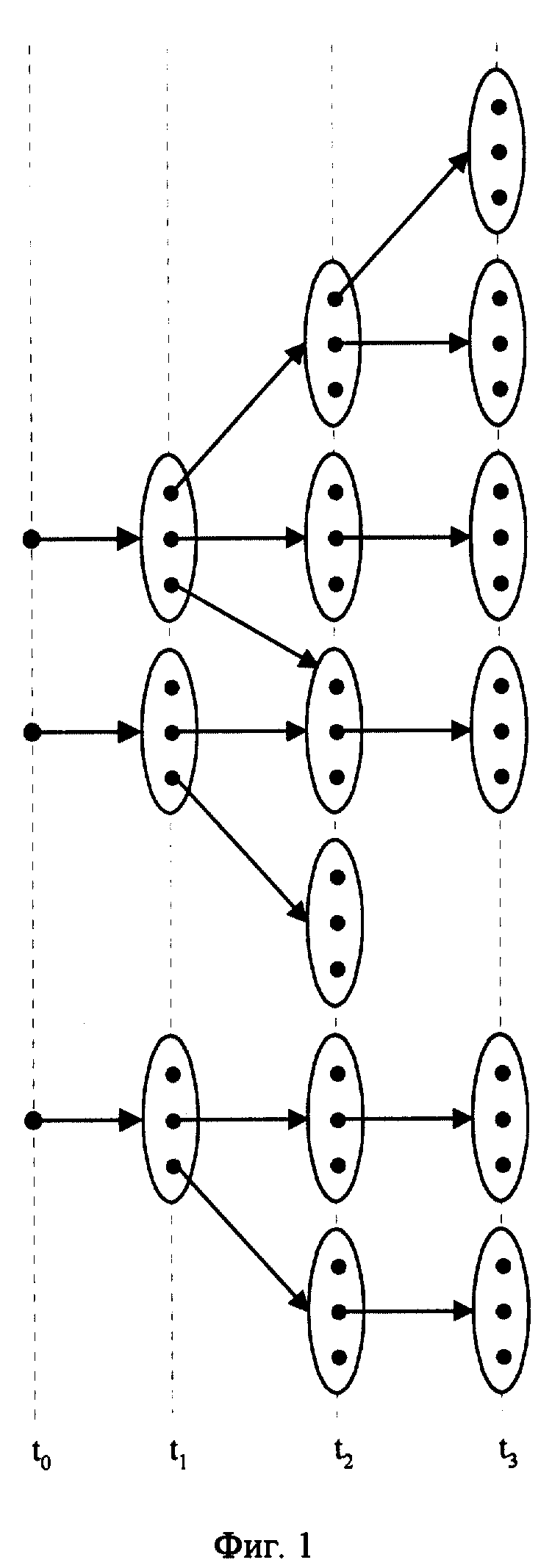
Устройство определения высокоточного относительного местоположения движущегося объекта по сигналам спутниковых радионавигационных систем, содержащее базовый навигационный приемник и подвижный навигационный приемник, отличающееся тем, что в него введены блок формирования грубой оценки базы (ГОБ), первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам базового навигационного приемника, а четвертый, пятый и шестой входы подключены соответственно к первому, второму и третьему выходам подвижного навигационного приемника; блок формирования дальностей и направлений на спутники (ДНС), к первому входу которого подключен первый выход базового навигационного приемника, ко второму входу - первый выход подвижного навигационного приемника, к третьему входу - четвертый выход базового навигационного приемника; блок формирования невязок первых разностей фаз (НПРФ), к первому входу которого подключен первый выход блока формирования ДНС, ко второму входу подключен пятый выход базового навигационного приемника, третий вход соединен с четвертым выходом подвижного навигационного приемника; блок инициализации фильтра, первый вход которого подключен ко второму выходу блока формирования ДНС, второй вход соединен с выходом блока формирования ГОБ, третий вход подключен к выходу блока формирования НПРФ; блок экстраполяции, первый и второй входы которого подключены соответственно к первому и второму выходам блока инициализации фильтра; блок формирования ковариационной матрицы сглаженных параметров (КМСП), первый вход которого подключен к первому выходу блока экстраполяции, второй вход - ко второму выходу блока формирования ДНС; блок формирования коэффициентов усиления, к первому входу которого и к третьему входу блока экстраполяции подключен выход блока формирования КМСП, второй вход соединен со вторым выходом блока формирования ДНС; блок формирования коэффициентов квадратичной формы (ККФ), первый вход которого подключен к выходу блока формирования коэффициентов усиления, второй вход соединен со вторым выходом блока формирования ДНС; блок расщепления и сглаживания траекторий, первый вход которого подключен к выходу блока формирования коэффициентов усиления, второй вход соединен с выходом блока формирования ККФ, третий вход - с выходом блока формирования НПРФ, четвертый вход - со вторым выходом блока экстраполяции, пятый вход - с выходом блока формирования ГОБ; блок выбора лучших траекторий, первый и второй входы которого подключены соответственно к первому и второму выходам блока расщепления и сглаживания траекторий, а выход подключен к четвертому входу блока экстраполяции; блок выбора наилучших траекторий, вход которого подключен к выходу блока выбора лучших траекторий, причем первый выход блока выбора наилучшей траектории является выходом устройства, а второй выход через пороговый блок соединен с четвертым входом блока инициализации фильтра.
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ "КИБОЛ" | 1992 |
|
RU2033693C1 |
| Огнетушитель | 0 |
|
SU91A1 |
| DE 3210298 A1, 29.09.83 | |||
| Клапан мгновенной отдувки | 1975 |
|
SU700173A1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2567700C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| US 5519620 A, 21.05.96 | |||
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |

