Изобретение относится к радионавигационным системам определения местоположения аппаратуры объекта-потребителя.
Известны способы определения пространственных координат и составляющих вектора скорости пользователей глобальных навигационных спутниковых систем (ГНСС), реализованные в системах второго поколения, к которым относятся российская ГНСС ГЛОНАСС и принадлежащая США система GPS.
Каждый навигационный космический аппарат (НКА) ГЛОНАСС и GPS непрерывно передает соответственные навигационные сообщения, содержащие информацию, на основании которой на определяемых объектах (пользователях ГНСС) навигационной аппаратурой пользователей (НАП) осуществляется одновременный прием навигационных радиосигналов от нескольких НКА, производятся измерения псевдодальностей между пользователями и НКА и производятся расчеты, необходимые для решения навигационной задачи. Геометрическим эквивалентом конечного алгоритма решения навигационной задачи этого известного способа является построение относительно используемых НКА нескольких поверхностей положения, точка пересечения которых и является оценкой положения пользователей.
Навигационные сообщения, передаваемые каждым НКА, содержат следующую информацию:
- информацию о состоянии спутников систем, позволяющую пользователям сделать вывод о целесообразности использования данных, передаваемых спутниками для навигационных определений;
- поправки к эталонам времени и частоты спутника;
- данные об эфемеридах (пространственных координатах и составляющих скорости);
- параметры для введения поправок на задержку навигационных радиосигналов спутников при распространении.
Формирование массивов навигационной (служебной) информации (время, эфемериды, параметры для введения поправок и т.д.), а также передачу (загрузку) их в память бортовых электронно-вычислительных машин соответствующих НКА производят наземными контрольными станциями, контролирующими орбиты НКА, расхождения шкал времени НКА с системным временем и прогнозирование эфемерид каждого НКА.
Используя информацию навигационных сообщений, принятых НАП, и измерения псевдодальностей до нескольких выбранных НКА, устанавливают функциональные зависимости между известными координатами НКА и неизвестными координатами пользователей ГНСС. Оценка координат пользователей сводится к решению системы с количеством навигационных уравнений, равным количеству измеренных псевдодальностей по НКА.
В результате решения системы навигационных уравнений, как правило, определяют четыре неизвестных: три координаты местоположения пользователя (Хп, Yп, Zп) и поправку к его шкале времени (поправка к его часам) (RU 2155969, G01S 5/02, 10.09.2000, US 5752218, G01S 5/00, 12.05.1998, WO 03062849, G01C 15/00, 22.01.2003).
Наиболее близким по техническому существу является способ определения местоположения объекта по навигационным радиосигналам, при котором определяют навигационные параметры - измерения псевдодальности и фазы сигнала псевдодоплеровской частоты по навигационным радиосигналам орбитальной группировки навигационных космических аппаратов НКА1 системы ГЛОНАСС и НКА2 системы GPS, передают потребителю основную навигационную информацию и вспомогательную информацию, на основе которой определяют местоположение объекта (RU 2181490 C1, G01S 5/02, 2002).
Недостатком известного способа является низкая точность определения местоположения аппаратуры объекта-потребителя.
Задачей изобретения является повышение точности определения местоположения аппаратуры объекта-потребителя, работающей в абсолютном режиме, до уровня, достижимого при использовании систем дифференциальной навигации.
Поставленная задача решается за счет того, что в способе определения местоположения объекта-потребителя по навигационным радиосигналам, при котором определяют навигационные параметры - измерения псевдодальности и фазы сигнала псевдодоплеровской частоты по навигационным радиосигналам орбитальной группировки навигационных космических аппаратов НКА1 системы ГЛОНАСС и НКА2 системы GPS, передают потребителю основную навигационную информацию и вспомогательную информацию, на основе которой определяют местоположение объекта, используют навигационные радиосигналы в трех частотных диапазонах L1, L2 и L3 для системы ГЛОНАСС и L5 для системы GPS соответственно, вспомогательную информацию дополняют данными о состоянии тропосферы и параметрами, связанными с движением Земли в солнечной системе, основную навигационную информацию формируют на борту навигационных космических аппаратов НКА1 с использованием сети наземных опорных станций и системы межспутниковой связи и измерений.
Данный способ реализуется спутниковой радионавигационной системой, содержащей орбитальную группировку навигационных космических аппаратов НКА1 системы ГЛОНАСС и НКА2 системы GPS, излучающих радиосигналы в трех частотных диапазонах L1, L2 и L3 для системы ГЛОНАСС и L5 для системы GPS соответственно, сеть станций сбора измерений (ССИ), выходы которой соединены с входами центра управления системой ГЛОНАСС, в котором вырабатывается вспомогательная информация, передаваемая в составе навигационных сигналов через сеть наземных опорных станций (НОС) на борт НКА1, оснащенный системой межспутниковой связи и измерений и системой формирования основной навигационной информации, наземную систему передачи данных, осуществляющую передачу вспомогательной информации от центра управления системой ГЛОНАСС по дополнительному каналу связи, и навигационную аппаратуру объекта-потребителя, в составе первого и второго антенно-фидерного устройства, выход каждого из которых соединен со входом соответствующего приемного устройства, а выходы обоих приемных устройств соединены с входами модуля цифровой обработки, осуществляющего оценку параметров местоположения объекта-потребителя.
Достигнуть указанного результата можно за счет использования при решении задачи определения местоположения потребителя более совершенного способа оценки его координат. В основе данного способа лежат несколько принципиально новых решений, которые стали возможны в результате развития ГНСС ГЛОНАСС и GPS:
- Уточнение модели первичных измерений навигационных параметров - псевдодальности и фазы сигнала псевдодоплеровской частоты, учитывающей дополнительные факторы, влияющие на точность навигационных определений.
- Использование для навигационных определений гражданских навигационных радиосигналов в трех частотных диапазонах LI, L2, L3 для системы ГЛОНАСС и L5 для системы GPS.
- Разработка и внедрение беззапросной технологии эфемеридно-временного обеспечения НКА, которая позволяет формировать основную навигационную информацию (параметры орбиты и шкалы времени НКА с погрешностью в единицы см и доли нс) на борту НКА с использованием сети НОС и системы межспутниковой связи и измерений.
- Расширение состава используемой при решении навигационных задач информации дополнительными данными о состоянии тропосферы, о параметрах вращения Земли и другой вспомогательной информации, позволяющей потребителям осуществлять навигационные определения с погрешностью в единицы сантиметров.
- Разработка системы передачи вспомогательной информации с использованием радиосигналов НКА в новых частотных диапазонах L3 и L5 или по наземным каналам связи (до развертывания орбитальной группировки НКА нового поколения, излучающих сигналы в трех частотных диапазонах).
Рассмотрим более подробно все указанные нововведения. Уточненная модель первичных измерений навигационных параметров - псевдодальности Si и фазы сигнала псевдодоплеровской частоты Фi имеет вид


где  - геометрическая дальность между НКА с координатами (XHKA, YHKA, ZHKA) и потребителем с координатами (x, y, z); δR - погрешность эфемеридной информации; с - скорость света; δt - расхождение между шкалами времени потребителя и используемой навигационной системы; δT - расхождение между шкалами времени НКА и его системы; δион - задержка распространения сигнала НКА в ионосфере; δтроп - задержка распространения сигнала НКА в тропосфере; δФ - погрешность измерения дальности, обусловленная закруткой фазы радиосигнала вследствие относительного движения НКА и потребителя; δз - погрешность измерения дальности, обусловленная влиянием приливов мирового океана на изменение гравитационного поля Земли; δрел - погрешность измерения дальности, обусловленная релятивистским эффектом; δмнл - погрешность, обусловленная многолучевым характером распространения сигнала НКА; λi - длина волны несущих колебаний сигнала НКА, индекс i обозначает частотный диапазон i=1 для диапазона L1, λ=2 для диапазона L2 и i=3 для диапазона L3 ГЛОНАСС или L5 GPS; Ni - целочисленная неоднозначность измерения фазы; eS,eФ - шумовые погрешности измерений псевдодальности и фазы соответственно.
- геометрическая дальность между НКА с координатами (XHKA, YHKA, ZHKA) и потребителем с координатами (x, y, z); δR - погрешность эфемеридной информации; с - скорость света; δt - расхождение между шкалами времени потребителя и используемой навигационной системы; δT - расхождение между шкалами времени НКА и его системы; δион - задержка распространения сигнала НКА в ионосфере; δтроп - задержка распространения сигнала НКА в тропосфере; δФ - погрешность измерения дальности, обусловленная закруткой фазы радиосигнала вследствие относительного движения НКА и потребителя; δз - погрешность измерения дальности, обусловленная влиянием приливов мирового океана на изменение гравитационного поля Земли; δрел - погрешность измерения дальности, обусловленная релятивистским эффектом; δмнл - погрешность, обусловленная многолучевым характером распространения сигнала НКА; λi - длина волны несущих колебаний сигнала НКА, индекс i обозначает частотный диапазон i=1 для диапазона L1, λ=2 для диапазона L2 и i=3 для диапазона L3 ГЛОНАСС или L5 GPS; Ni - целочисленная неоднозначность измерения фазы; eS,eФ - шумовые погрешности измерений псевдодальности и фазы соответственно.
Как уже отмечалось выше, наличие измерений первичных навигационных параметров в двух частотных диапазонах позволяет формировать измерения, свободные от погрешности, связанной с распространением сигнала в ионосфере. Подобные измерения формируются путем линейного комбинирования измерений (1) и (2), полученных по сигналам в диапазонах L1 и L2


где S - отсчет псевдодальности, сформированный путем комбинирования измерений S1 и S2, полученных при измерениях на частотах в диапазонах L1 и L2 соответственно; fi - несущая частота сигнала НКА в диапазоне i; А, В - масштабные коэффициенты, которые соответственно принимают значения 2.54 и 1.54 для системы GPS, 2.53 и 1.53 при обработке измерений, полученных по сигналам системы ГЛОНАСС; λ·Ф - отсчет фазы псевдодоплеровской частоты, сформированный путем комбинирования измерений Ф1 и Ф2, полученных при измерениях на частотах в диапазонах L1 и L2 соответственно; λi - длина волны колебаний сигнала НКА в диапазоне i;  - масштабный коэффициент.
- масштабный коэффициент.
При использовании измерений, полученных по сигналам в трех частотных диапазонах L1, L2 и L3/L5, комбинированные измерения (1) и (2) могут быть записаны следующим образом:


где  ,
,  ,
,  ,
,  - масштабные коэффициенты.
- масштабные коэффициенты.
Необходимо отметить, что обработка измерений ГЛОНАСС и GPS должна вестись раздельно, поскольку каждая система имеет собственную шкалу времени, и для совместной обработки необходимо вводить еще одну неизвестную переменную - расхождение системных шкал времени.
Для полученных отсчетов (3), (4) псевдодальности S и фазы λ·Ф будут справедливы выражения (1) и (2), в которых остаточная погрешность, вызванная задержкой сигнала в ионосфере, не превышает величину 6 см. При использовании выражений (5) и (6) будут компенсированы составляющие второго порядка задержки радиосигналов в ионосфере. Величины δR и δТ потребитель вычисляет с помощью данных, передаваемых из источника высокоточных эфемерид и частотно-временных поправок - специализированного центра, который может входить в состав наземного комплекса управления ГЛОНАСС или GPS. При этом точность оценки параметров орбит и шкал времени НКА составляет единицы см и доли нс. Кроме того, данный центр обеспечивает потребителя информацией, необходимой для оценки влияния закрутки фазы радиосигнала δФ, приливов δз и релятивистского эффекта δрел с остаточной погрешностью в единицы см. В настоящее время для борьбы с эффектом многолучевости разработано довольно большое количество различных методов, которые, в первую очередь, используются при проведении высокоточных навигационных определений. Эти методы включают как аппаратные, так и программные решения и в данном случае не рассматриваются. Поэтому дальнейший анализ будем строить исходя из предположения, что погрешность, вызванная многолучевым характером распространения сигналов НКА, пренебрежимо мала по сравнению с другими погрешностями.
Исходя из вышесказанного, а также представив задержку сигнала в тропосфере δтроп в виде произведения величины задержки сигнала в направлении зенита τ и отображающей функции М, которая является функцией температуры, давления и влажности, можно записать следующие выражения для комбинационных отсчетов псевдодальности и фазы:


Модель оценки параметров
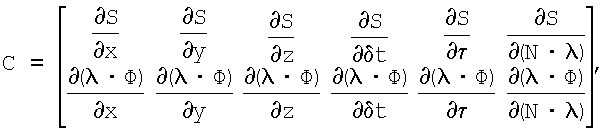
С учетом того, что при формировании комбинационных измерений целочисленный характер неоднозначностей Ni нарушается, то выражения (7) и (8) могут быть записаны в виде линеаризованной системы уравнений относительно вектора искомых параметров Δ (x, y, z, δt, τ, N·λ)

где С - матрица коэффициентов при искомых параметрах Δ; Y - вектор невязок измеренных и расчетных значений навигационных параметров, который характеризуется корреляционной матрицей W; Е - вектор некомпенсированных погрешностей измерения навигационных параметров.
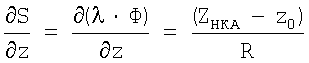
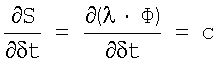
При этом коэффициенты линейного разложения (7) и (8) для любого произвольного НКА могут быть записаны следующим образом:
где 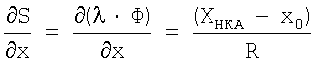 ,
,  ,
,  ,
,  ,
,  ,
, 
 , x0, y0, z0 - априорные значения координат потребителя.
, x0, y0, z0 - априорные значения координат потребителя.
Необходимо отметить, что в случае обработки измерений, полученных по сигналам двух систем, к числу неизвестных добавляется расхождение между системными шкалами времени ГЛОНАСС и GPS, а также при расчете координат необходимо дополнительно учитывать расхождение между системами координат WGS-84 (G1150) и ПЗ-90.02.
В наиболее простом для рассмотрения случае потребитель находится в статическом положении, поэтому для оценки параметров его местоположения можно использовать фильтр, основанный на оценке методом максимума апостериорной вероятности, т.е. фильтр Калмана, имеющий следующий вид:


где m - момент времени, на который производится уточнение координат; Km - корреляционная матрица вектора искомых параметров в момент времени m.
Выражения (10) и (11) в общем случае можно использовать и для оценки искомых параметров местоположения подвижного потребителя. Динамика потребителя может меняться от десятков метров в секунду для автомобиля до нескольких километров в секунду для низкоорбитального космического аппарата. Скорость ухода шкалы времени потребителя относительно системной шкалы δt определяется качеством опорного генератора НАП. При использовании кварцевого генератора с относительной нестабильностью порядка 10-10 скорость ухода может составлять несколько сантиметров в секунду. При этом величина тропосферной задержки сигнала в направлении зенита τ меняется сравнительно медленно, всего лишь несколько сантиметров в час. Наконец, последний параметр N·λ, остается постоянным при условии отсутствия сбоев, связанных с перескоками схем слежения за несущей частотой сигналов НКА из одного устойчивого положения в другое.
Для учета динамики потребителя и флуктуации остальных параметров целесообразно представить значение корреляционной функции Km-1 в виде суммы

где Q - ковариационная матрица, учитывающая изменение искомых параметров между моментами времени m-1 и m-2. Для рассматриваемого нами случая с шестью неизвестными матрица Q будет иметь вид
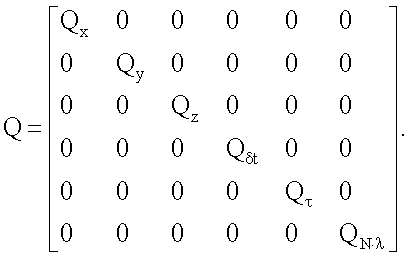
В рассматриваемой матрице диагональные элементы определяются в соответствии с динамикой потребителя, параметрами ухода генератора, активностью атмосферы. При отсутствии сбоев в работе схем фазовой автоподстройки частоты НАП элемент QN·λ будет всегда равен нулю. В статическом режиме нулю также будут равны Qx, Qy и Qz. Значение Qδt(δt) зависит от величины относительно нестабильности частоты опорного генератора НАП и может меняться в зависимости от режимов и условий работы НАП. На практике принимают, что данный процесс является белым шумом с большой флуктуацией, чтобы учесть непрогнозируемые выбросы генератора. Для учета изменения тропосферы значение Qτ выбирается исходя из предположения, что величина задержки сигнала в тропосфере вследствие различных флуктуации может достигать 5 мм/ч.
Таким образом, в навигационной аппаратуре потребителя может быть реализован алгоритм оценки координат в соответствии с (8), погрешность решения навигационной задачи при этом может составлять несколько см (среднеквадратическая погрешность), при обеспечении потребителя дополнительной информацией, которая была рассмотрена выше.
На чертеже представлена структурная схема заявленной системы, на которой использованы следующие обозначения:
1 - орбитальная группировка навигационных космических аппаратов (НКА) 1
2 - орбитальная группировка НКА 2
3 - сеть наземных опорных станций (НОС)
4 - центр управления системой ГЛОНАСС (ЦУС)
5 - сеть станций сбора измерений (ССИ)
6 - навигационная аппаратура потребителя, в составе
7 - антенно-фидерное устройство (АФУ) 1
8 - приемное устройство (ПРМ) 1
9 - АФУ 2
10 - приемное устройство (ПРМ) 2
11 - модуль цифровой обработки (МЦО)
12 - наземная система передачи данных (СПД)
Для высокоточных навигационных определений потребителю 6 необходимо провести измерения навигационных параметров псевдодальности SHKA и фазы псевдодоплеровской частоты ФHKA по навигационным радиосигналам НКА 1 и НКА 2 в трех частотных диапазонах L1, L2 и L3/L5 (L1 и L2 введены на новых поколениях НКА «Глонасс-М» и GPS Block IIR, сигналы L3 ГЛОНАСС предполагается излучать на проектируемых в настоящее время НКА ГЛОНАСС, сигналы L5 должны излучать НКА GPS Block IIF).
В составе навигационных радиосигналов потребителю должна быть передана основная навигационная информация D (данные о параметрах движения и шкалах времени НКА, информация о состоянии ионосферы) и вспомогательная информация V (дополнительными данными о состоянии тропосферы, о параметрах вращения Земли и т.д.).
На борту НКА 1 производится измерение первичных навигационных параметров SHOC и ФHOC, полученных по навигационным радиосигналам наземных опорных станций (НОС) 3, а также данных межспутниковых измерений SMC и ФMC между НКА 1а и НКА 1б. В составе навигационных радиосигналов НОС 3, НКА 1а и НКА 1б передаются данные о местоположении данных радионавигационных источников. Полученные измерения и данные позволяют сформировать основную информацию D.
Сигналы НОС 3 используются для передачи на борт НКА 1 вспомогательной информация V, сформированная в центре управления системой (ЦУС) 4. Межспутниковая линия связи между НКА 1а и НКА 1б используется для обмена НКА основной информацией и оперативного обновления вспомогательной.
Для формирования вспомогательной информации V в ЦУС 4 передается отсчеты SHKA, ФHKA, метеорологическая информация (температура, давление и влажность), сформированные на станциях сбора измерения (ССИ) 5. Полученные измерения псевдодальностей и фаз используются для оценки эфемерид и частотно-временных поправок с высокой точностью (погрешность в единицы сантиметров), оценки коэффициентов перехода из системы координат, используемой орбитальной группировкой из НКА 1, в систему координат орбитальной группировки НКА 2. Данные метеорологических наблюдений используются для формирования коэффициентов отображающей функции, связывающую величину вертикальной задержки сигнала в тропосфере с реальными измерениями.
Потребитель 6 принимает радиосигналы НКА 1 и 2 с помощью антенно-фидерного устройства (АФУ) 7 и передает в приемное устройство (ПРМ) 8, где происходит измерение первичных навигационных параметров SHKA и ФHKA, выделение основной D и вспомогательной V навигационной информации. Данные измерения поступают в модуль цифровой обработки (МЦО) 11.
Дополнительным каналом передачи вспомогательной информации V, например, в случае отсутствия радиосигналов НКА 1 и использования только сигналов НКА 2 является система передачи данных (СПД) 12. Радиосигналы СПД 12 принимаются потребителем 6 с помощью АФУ 9. ПРМ 10 выделяет принятую информацию и передает ее в МЦО 11, где реализуется расчетная формула (10), приведенная выше, с использованием полученных АФУ 8 измерений и принятой основной D и вспомогательной информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОГО ПРИЕМНИКА | 2015 |
|
RU2638411C2 |
| СПОСОБ И СИСТЕМА МУЛЬТИЧАСТОТНОГО ПОЗИЦИОНИРОВАНИЯ В ЭКРАНИРОВАННОМ ПРОСТРАНСТВЕ | 2013 |
|
RU2543521C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2587666C1 |
| Применение триангуляционных методов измерений в системе ГЛОНАСС. | 2015 |
|
RU2669042C2 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| ИМИТАТОР НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2697811C2 |
Изобретение относится к радионавигационным системам определения местоположения аппаратуры объекта-потребителя. Технический результат - повышение точности определения местоположения аппаратуры объекта-потребителя, работающей в абсолютном режиме, до уровня, достижимого при использовании систем дифференциальной навигации. Поставленная задача решается за счет того, что в способе определения местоположения объекта-потребителя по навигационным радиосигналам, при котором определяют навигационные параметры - измерения псевдодальности и фазы сигнала псевдодоплеровской частоты по навигационным радиосигналам орбитальной группировки навигационных космических аппаратов НКА1 системы ГЛОНАСС и НКА2 системы GPS, передают потребителю основную навигационную информацию и вспомогательную информацию, на основе которой определяют местоположение объекта, используют навигационные радиосигналы в трех частотных диапазонах L1, L2 и L3 для системы ГЛОНАСС и L5 для системы GPS соответственно, вспомогательную информацию дополняют данными о состоянии тропосферы и параметрами, связанными с движением Земли в солнечной системе, основную навигационную информацию формируют на борту навигационных космических аппаратов НКА1 с использованием сети наземных опорных станций и системы межспутниковой связи и измерений. Представлена также система, реализующая указанный способ. 2 н.п. ф-лы, 1 ил.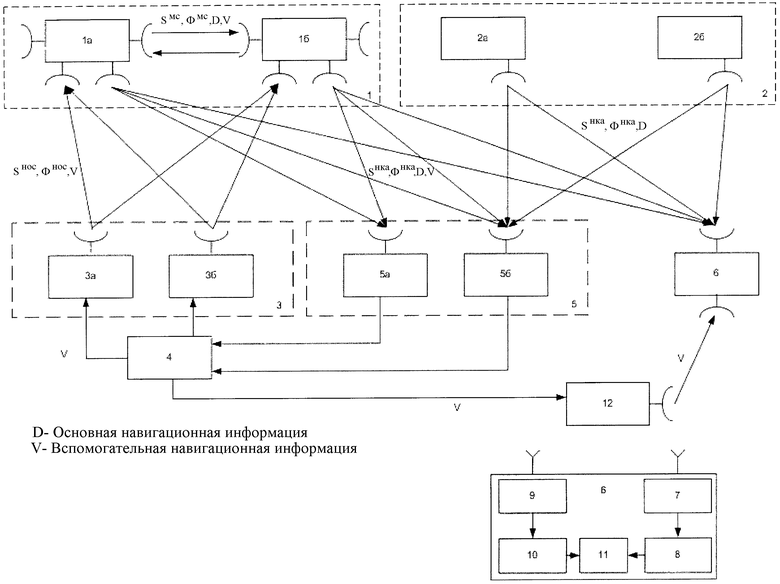
1. Способ определения местоположения объекта-потребителя по навигационным радиосигналам, при котором измеряют псевдодальность и фазу сигнала псевдодоплеровской частоты по навигационным радиосигналам орбитальной группировки навигационных космических аппаратов НКА1 системы ГЛОНАСС и НКА2 системы GPS, передают потребителю основную навигационную информацию и вспомогательную информацию, на основе которой определяют местоположение объекта-потребителя, отличающийся тем, что используют навигационные радиосигналы в трех частотных диапазонах L1, L2 и L3 для системы ГЛОНАСС и L5 для системы GPS соответственно, вспомогательную информацию дополняют данными о состоянии тропосферы и параметрами, связанными с движением Земли в солнечной системе, основную навигационную информацию формируют на борту навигационных космических аппаратов НКА1 с использованием сети наземных опорных станций и системы межспутниковой связи и измерений.
2. Спутниковая радионавигационная система для осуществления способа по п.1, содержащая орбитальную группировку навигационных космических аппаратов НКА1 системы ГЛОНАСС и НКА2 системы GPS, излучающие радиосигналы в трех частотных диапазонах L1, L2 и L3 для системы ГЛОНАСС и L5 для системы GPS соответственно, сеть станций сбора измерений, выходы которой соединены со входами центра управления системой ГЛОНАСС, в котором вырабатывается вспомогательная информация, передаваемая в составе навигационных сигналов через сеть наземных опорных станций на борт НКА1, оснащенный системой межспутниковой связи и измерений и системой формирования основной навигационной информации, наземную систему передачи данных, осуществляющую передачу вспомогательной информации от центра управления системой ГЛОНАСС по дополнительному каналу связи, и навигационную аппаратуру объекта-потребителя, в составе первого и второго антенно-фидерного устройства, выход каждого из которых соединен со входом соответствующего приемного устройства, а выходы обоих приемных устройств соединены с входами модуля цифровой обработки, осуществляющего оценку параметров местоположения объекта-потребителя.
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| US 5752218 A, 12.05.1998 | |||
| WO 03062849 A, 22.01.2003 | |||
| WO 2006090368 A, 31.08.2006 | |||
| US 7365544 A, 29.04.2008. | |||

