Родственные заявки
Настоящая заявка испрашивает приоритет по предварительной заявке США №60/941,271, "Partial Search Carrier-Phase Integer Ambiguity Resolution", поданной 31 мая 2007, которая полностью включена в данный документ посредством ссылки.
Настоящая заявка связана с патентной заявкой США №12/119,451, поданной 12 мая 2008, "Distance Dependent Error Mitigation in Real-Time Kinematic (RTK) Positioning", номер дела поверенного 60877-5019-US, которая полностью включена в данный документ посредством ссылки.
Область техники, к которой относится изобретение
Раскрытые варианты осуществления относятся, в общем, к системам позиционирования, таким как глобальная система позиционирования (GPS) или европейская система Galileo, и, в частности, к способам разрешения целочисленных неоднозначностей в измерениях фазы несущей, выполняемых мобильными приемниками в таких системах позиционирования.
Уровень техники
Широкомасштабная система позиционирования, такая как глобальная система позиционирования (GPS), использует группу спутников для определения местоположения или навигации объектов на земле. Каждый спутник в системе GPS в настоящее время передает два несущих сигнала: L1 и L2, с частотами 1,5754 ГГц и 1,2276 ГГц, и длинами волны 0,1903 м и 0,2442 м, соответственно. Глобальные навигационные спутниковые системы (GNSS) следующего поколения, такие как модернизированные системы GPS и Galileo, будут предлагать третий несущий сигнал, L5. В системе GPS, L5 будет иметь частоту 1,1765 ГГц и длину волны 0,2548 м.
Приемник GPS обычно выполняет два типа измерений GPS: измерения псевдодальности и измерения фазы несущей.
Измерение псевдодальности (или кодовое измерение) является базовым наблюдением GPS, которое могут выполнять все типы приемников GPS. Оно использует C/A или P коды, модулирующие несущие сигналы. При доступных измерениях GPS, дальность или расстояние между приемником GPS и каждым из множества спутников вычисляется посредством умножения времени прохождения сигнала (от спутника к приемнику) на скорость света. Эти дальности обычно называются псевдодальностями, так как измерения GPS могут содержать ошибки вследствие различных факторов ошибок, таких как ошибка тактирования генератора тактовых импульсов спутника, эфемеридная ошибка, эффекты преломления в ионосфере и тропосфере, шум отслеживания приемника и ошибка многолучевого распространения и т.д. Для устранения или уменьшения этих ошибок во многих приложениях GPS используются дифференциальные операции. Дифференциальные GPS (DGPS) операции обычно включают в себя базовый опорный приемник GPS, пользовательский приемник GPS и механизм взаимодействия между пользовательским и опорным приемниками. Опорный приемник помещается в известном местоположении и используется для формирования поправок, связанных с некоторыми или всеми из вышеперечисленных факторами ошибок. Поправки, полученные на опорной станции, исходные измерения на опорной станции, или поправки, полученные третьей стороной (например, компьютером или сервером) на основе информации, принятой от опорной станции (и возможно также от других опорных станций), предоставляются в пользовательский приемник, который затем использует поправки или исходные данные, чтобы соответствующим образом корректировать свое вычисленное положение.
Измерение фазы несущей осуществляют интегрированием реконструированной несущей сигнала в том виде, как она поступает в приемник. Из-за неизвестного количества полных циклов в переходе между спутником и приемником, когда приемник начинает отслеживание фазы несущей сигнала, в измерении фазы несущей имеется неоднозначность полного цикла. Для достижения высокой точности в измерениях фазы несущей эта неоднозначность полного цикла должна быть разрешена. Неоднозначности полного цикла также известны как "целочисленные неоднозначности" после того, как они разрешаются, и как "плавающие неоднозначности" или "вещественные неоднозначности" до их разрешения. Термины "неоднозначность" и "неоднозначности" относятся к переменным (т.е. переменным, представляющим неоднозначности полного цикла), чьи значения требуется разрешить, тогда как термины "значения неоднозначности", "значения целочисленной неоднозначности" и "значения плавающей неоднозначности" указывают на значения, которые были вычислены или определены для соответствующих неоднозначностей. Дифференциальные операции с использованием измерений фазы несущей часто называют операциями кинематического позиционирования/навигации в реальном времени (RTK).
Когда сигналы GPS отслеживаются непрерывно и не происходит потери захвата, целочисленные неоднозначности, разрешенные в начале обследования, могут сохраняться для всего интервала кинематического позиционирования GPS. Спутниковые сигналы GPS, однако, могут иногда затеняться (например, зданями в условиях "городского каньона"), или кратковременно блокироваться (например, когда приемник проходит под мостом или через туннель). Как правило, в таких случаях, значения целочисленной неоднозначности "теряются" и должны быть определены повторно. Этот процесс может занимать от нескольких секунд до нескольких минут. Фактически, наличие значительных ошибок многолучевого распространения или немоделированных систематических отклонений в одном или более измерениях псевдодальности либо фазы несущей может сделать разрешение неоднозначностей невозможным для существующих коммерческих систем GPS RTK. По мере удаления приемника (т.е. увеличения расстояния между опорным приемником и мобильным приемником, положение которого определяется) зависящие от расстояния отклонения (например, орбитальные ошибки и ионосферные и тропосферные эффекты) растут, и, как следствие, достоверное разрешение неоднозначности (или повторная инициализация) становится еще более сложной задачей.
Раскрытие изобретения
Способ разрешения целочисленной неоднозначности в глобальной навигационной спутниковой системе использует процесс частичного поиска, который с помощью информации о плавающих неоднозначностях выбирает те частичные комбинации неоднозначностей, которые скорее всего обеспечат успешный поиск.
В одном варианте осуществления оцениваются начальные плавающие неоднозначности, и затем определяются наилучший вариант набора и второй наилучший вариант набора значений целочисленной неоднозначности. При условии, что наилучший набор значений целочисленной неоднозначности не удовлетворяет тесту различения, каждая неоднозначность, для которой значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не удовлетворяют предопределенным критериям, удаляется из набора неоднозначностей для получения уменьшенного набора неоднозначностей. Неоднозначности в уменьшенном наборе неоднозначностей затем разрешаются, и выходные данные формируются в соответствии с разрешенными целочисленными неоднозначностями.
В другом варианте осуществления второй уменьшенный набор неоднозначностей вырабатывается посредством удаления из уменьшенного набора каждой неоднозначности, для которой значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не удовлетворяют предопределенным критериям. Неоднозначности во втором уменьшенном наборе неоднозначностей затем разрешаются и выходные данные формируются в соответствии с разрешенными целочисленными неоднозначностями.
Этот процесс частичного поиска обеспечивает возможность системам GPS RTK разрешать неоднозначности с большей скоростью, для приложений повышенной дальности и в проблемных средах. Процесс не требует существенной вычислительной мощности и, таким образом, является подходящим для приемников GPS с ограниченными возможностями микропроцессора.
Краткое описание чертежей
Фиг.1 - блок-схема компьютерной системы, которая может использоваться для осуществления способа разрешения целочисленной неоднозначности методом частичного поиска в глобальной навигационной спутниковой системе в соответствии с некоторыми вариантами осуществления.
Фиг.2 - блок-схема последовательности операций, иллюстрирующая операции кинематического позиционирования в реальном времени в соответствии с некоторыми вариантами осуществления.
Фиг.3A - блок-схема последовательности операций, иллюстрирующая процесс частичного поиска для двухчастотной глобальной навигационной спутниковой системы в соответствии с некоторыми вариантами осуществления.
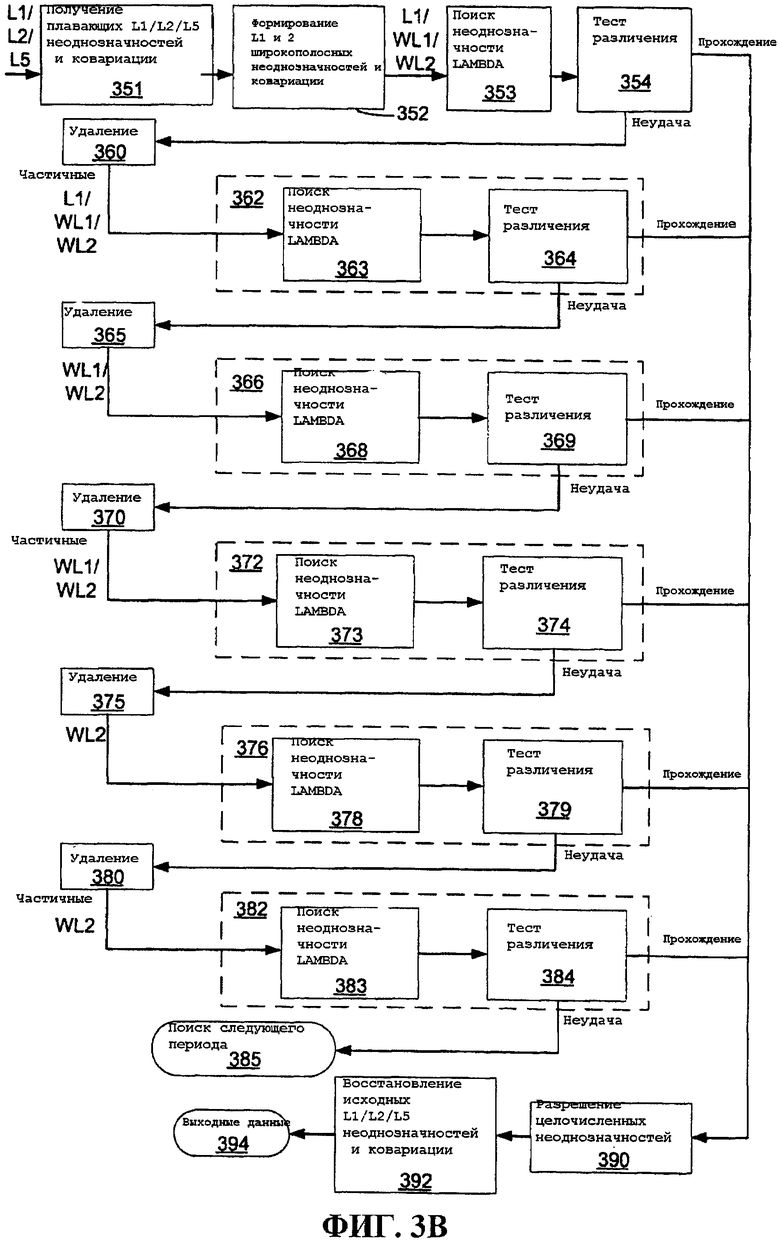
Фиг.3B - блок-схема последовательности операций, иллюстрирующая процесс частичного поиска для трехчастотной глобальной навигационной спутниковой системы в соответствии с некоторыми вариантами осуществления.
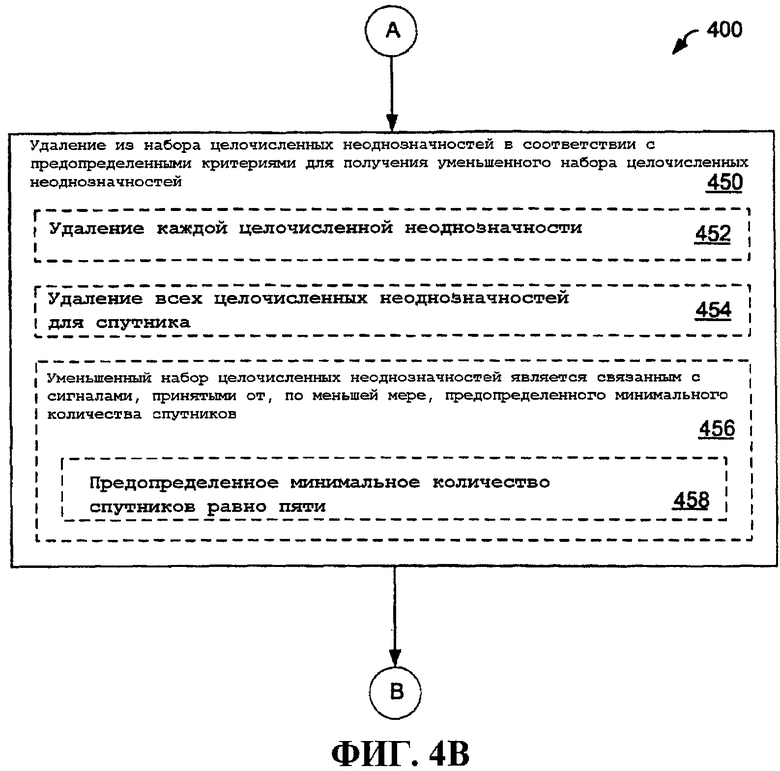
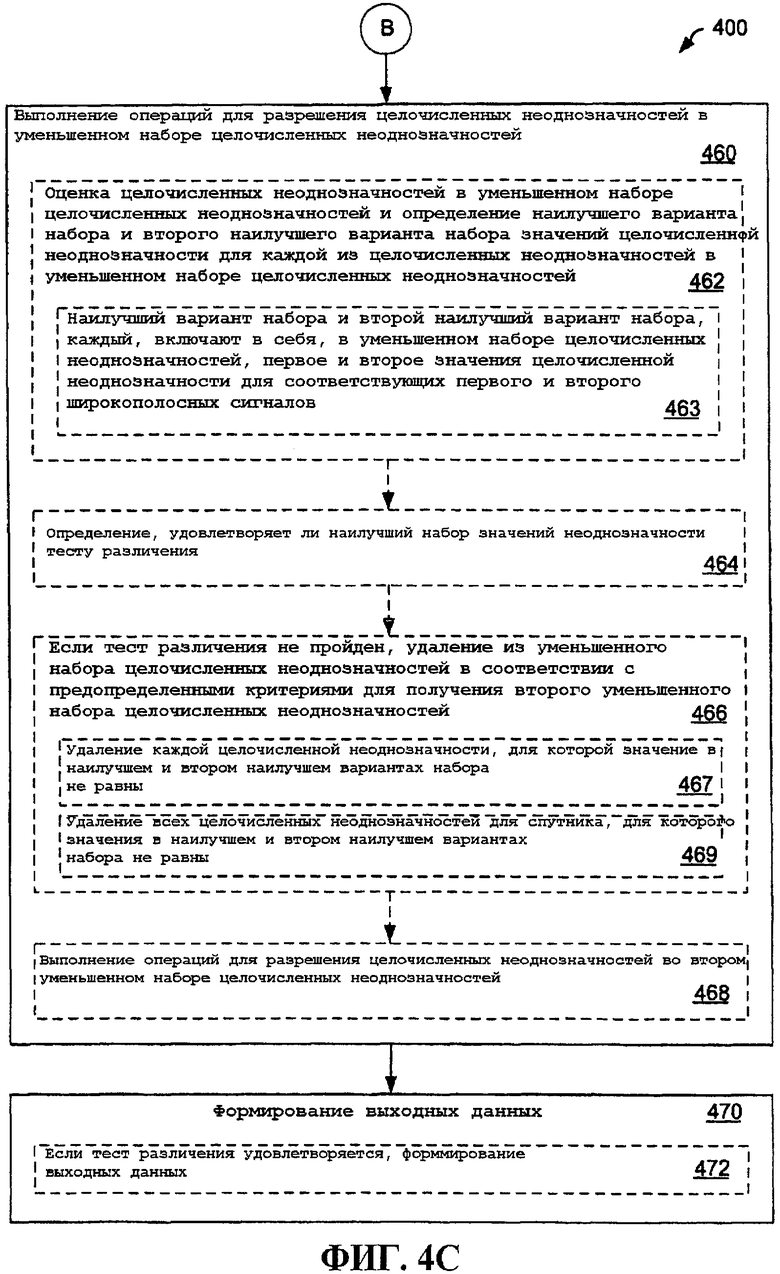
Фиг.4A-4C - блок-схемы последовательности операций, иллюстрирующие способ разрешения целочисленной неоднозначности методом частичного поиска в соответствии с некоторыми вариантами осуществления.
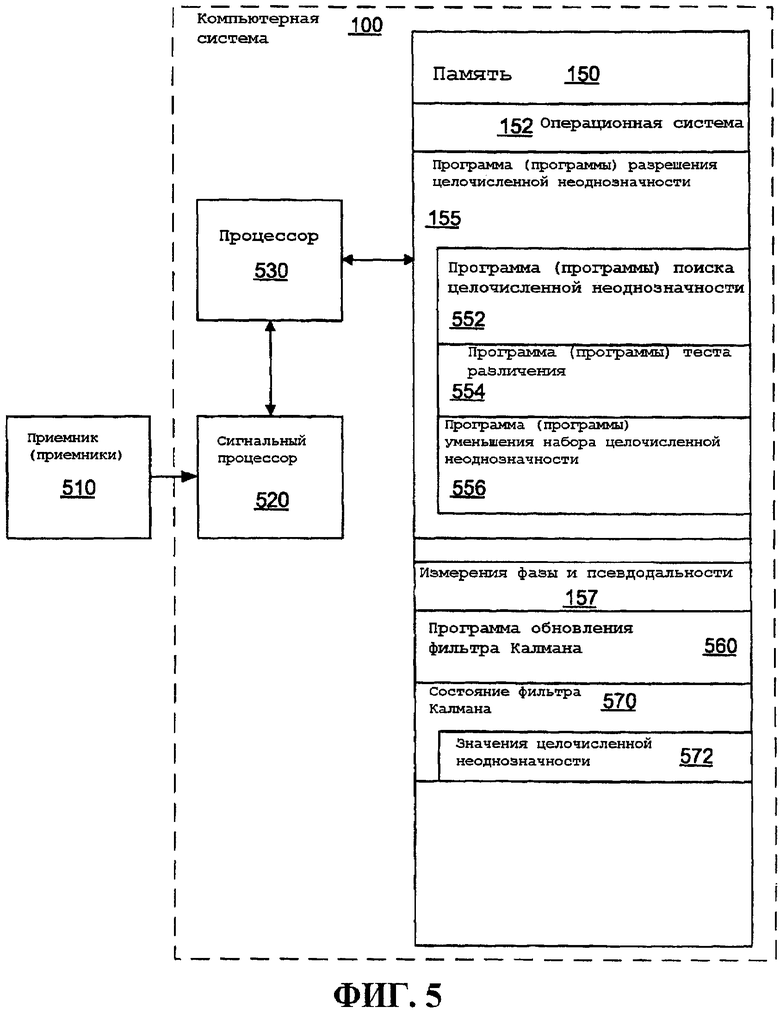
Фиг.5 - блок-схема, иллюстрирующая компоненты глобальной навигационной спутниковой системы в соответствии с некоторыми вариантами осуществления.
Одинаковые ссылочные позиции указывают на соответствующие части на всех чертежах.
Осуществление изобретения
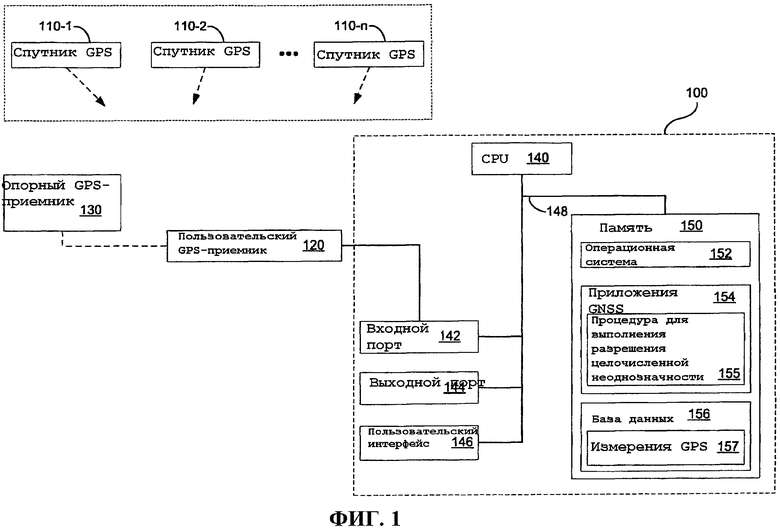
Фиг.1 иллюстрирует компьютерную систему 100, которая может использоваться для осуществления способа разрешения целочисленной неоднозначности методом частичного поиска, согласно одному варианту осуществления настоящего изобретения. Компьютерная система 100 соединена с пользовательским GPS-приемником 120, который предоставляет в компьютерную систему 100 GPS измерения кода и фазы несущей на основе сигналов от множества спутников 110-1, 110-2,..., 110-n, где n - это количество спутников в пределах видимости пользовательского GPS-приемника 120. Множество спутников 110-n или любые один или более из них, в дальнейшем в этом документе иногда указываются как спутник (спутники) 110. Пользовательский GPS-приемник 120 может взаимодействовать с опорным GPS-приемником 130. Опорный GPS-приемник 130 также производит измерения на основе сигналов от множества спутников 110. Измерения, сделанные опорным GPS-приемником 130, используются для формирования поправок для измерений GPS, сделанных пользовательским GPS-приемником 120. Пользовательский GPS-приемник 120 или комбинация пользовательского GPS-приемника 120 и компьютерной системы 100 иногда называется мобильным приемником, в отличие от опорного GPS-приемника, который обычно (но не обязательно) находится в фиксированном положении или местоположении.
В некоторых вариантах осуществления, пользовательский GPS-приемник 120 и компьютерная система 100 интегрированы в единое устройство внутри единого корпуса, как, например, портативное, ручное, или даже носимое устройство отслеживания положения, или установленная на транспортном средстве или иным образом мобильная система определения местоположения и/или навигации. В других вариантах осуществления, пользовательский GPS-приемник 120 и компьютерная система 100 не объединяются в единое устройство.
Как показано на Фиг.1, компьютерная система 100 включает в себя один или более центральный процессор (CPU) 140 (например, один или более микропроцессор или ядро микропроцессора), память 150, входной порт 142 и выходной порт 144, и (необязательно) пользовательский интерфейс 146, соединенные друг с другом посредством одной или более коммуникационных шин 148. Память 150 может включать в себя высокоскоростное оперативное запоминающее устройство и может включать в себя энергонезависимое запоминающее устройство, таких как один или более накопителей на магнитных дисках, оптических дисковых накопителей, устройств флэш-памяти, или других энергонезависимых твердотельных запоминающих устройств. Память 150 предпочтительно хранит операционную систему 152, базу 156 данных и процедуры 154 приложения GPS. Процедуры приложения GPS могут включать в себя процедуры 155 для реализации способа разрешения целочисленной неоднозначности методом частичного поиска, согласно одному варианту осуществления настоящего изобретения, как более подробно описано ниже. Операционная система 152, и прикладные программы, и процедуры 154 и 155, сохраненные в памяти 150, предназначены для исполнения посредством одного или более CPU 140 компьютерной системы 100. Память 150 предпочтительно также хранит структуры данных, используемые во время исполнения процедур 154 и 155 приложения GPS, включая GPS измерения 157 псевдодальности и/или фазы несущей, также как другие структуры данных, описанные в настоящем документе.
Входной порт 142 предназначен для приема данных от пользовательского GPS-приемника 120, и выходной порт 144 используется для вывода данных и/или результатов вычисления. Данные и результаты вычисления могут также показываться на устройстве отображения пользовательского интерфейса 146. В то время как в описании в настоящем документе часто используются термины "GPS" и "сигналы GPS" и подобные им, настоящее изобретение равным образом применимо к другим системам GNSS и сигналам от спутников GNSS в этих системах.
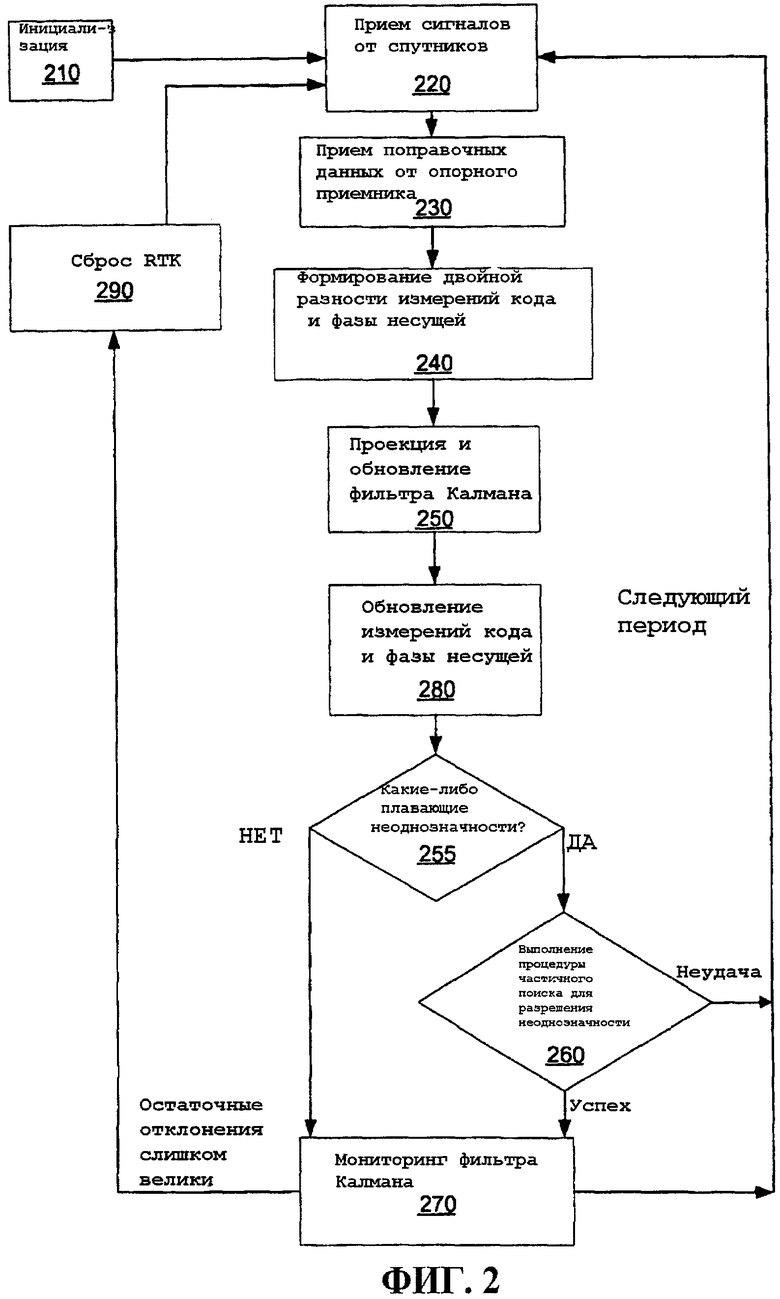
Фиг.2 иллюстрирует вычислительную последовательность для операций кинематического (RTK) позиционирования/навигации в реальном времени. Операции RTK инициализируются 210 для того, чтобы очистить набор состояний фильтра Калмана. Сигналы принимаются от спутников 220, и поправочные данные принимаются от опорного приемника 230.
В то время как описание фильтров Калмана не входит в задачу настоящего документа, компьютерная система 100 обычно включает в себя фильтр Калмана для обновления местоположения и других аспектов состояния пользовательского GPS-приемника 120, также называемого состоянием фильтра Калмана. Состояние фильтра Калмана фактически включает в себя много состояний, каждое из которых представляет один из аспектов местоположения приемника GPS (например, X, Y и Z, или составляющие широты, долготы и зенита местоположения), или движения (например, скорость и/или ускорение), или состояния вычислительного процесса, который используется в фильтре Калмана.
Фильтр Калмана обычно является процедурой, или набором процедур, исполняемых процессором. Фильтр Калмана исполняется многократно (например, один раз в секунду), каждый раз с использованием новых измерений кода (также называемых измерениями псевдодальности) и измерений фазы несущей, для обновления состояния фильтра Калмана. Хотя уравнения, используемые фильтрами Калмана, являются сложными, фильтры Калмана широко используются в области навигации, и поэтому только те аспекты фильтров Калмана, которые являются существенными для настоящего изобретения, требуют детального описания. Следует отметить, что хотя фильтры Калмана широко используются в приемниках GPS и других навигационных системах, многие аспекты этих фильтров Калмана будут изменяться от одного варианта осуществления к другому. Например, фильтры Калмана, используемые в некоторых приемниках GPS, могут включать в себя состояния, которые не включены в другие фильтры Калмана, или могут использовать немного другие уравнения, нежели используемые в других фильтрах Калмана.
Существенным для настоящего описания аспектом фильтров Калмана является включение значений неоднозначности в состояние фильтра Калмана и статус этих значений. Во время попытки осуществить захват сигналов от набора спутников GPS (или GNSS), значения неоднозначности измерений фазы несущей от каждого спутника называются "значениями плавающей неоднозначности". После того как захват был осуществлен, значения неоднозначности были разрешены, они называются значениями целочисленной неоднозначности, или фиксированными значениями неоднозначности, так как значения разрешенных неоднозначностей фиксированы и являются целыми числами. С другой точки зрения, процедуры фильтра Калмана, или другие процедуры в компьютерной системе 100, определяют, когда значения плавающей неоднозначности стабилизировались, в этой точке стабилизированные значения неоднозначности становятся значениями целочисленной неоднозначности.
На основе сигналов от спутников 220 и поправочных данных от опорного приемника 230 затем формируются 240 двойные разности измерений кода и фазы несущей. В точных приложениях позиционирования GPS, двойные разности измерения фазы несущей обычно формируются для погашения многих из систематических ошибок, существующих в измерениях GPS. Двойные разности наблюдений кода и фазы несущей в метрических единицах могут быть определены как:
 (1)
(1)
 (2)
(2)
где: нижний индекс i обозначает частоту, т.е. L1, L2 или L5; Pi и φi - наблюдения кода и фазы несущей, соответственно; ∇∆ - оператор двойной разности; ρ - геометрическое расстояние от спутника до приемника; ∇∆T - остаточное дифференциальное тропосферное отклонение, которое классически представляется как функция остаточной зенитной тропосферной задержки вместе с функцией преобразования, описывающей зависимость тропосферной задержки от угла возвышения от приемника к спутнику; ∇∆I - двойное дифференциальное ионосферное отклонение; ∇∆O - двойная дифференциальная поправка орбитальной ошибки, которая может быть получена от сетевой системы RTK или широкозонной усиливающей системы (WAAS), такой как сеть StarFire™ Network компании Navcom Technology Inc.; λi и fi - длина волны и частота i-ой несущей, соответственно; ∇∆Ni - двойная разность целочисленной неоднозначности для i-ой несущей частоты; и члены  и
и  представляют кодовую и фазовую остаточные ошибки, соответственно, включая случайные шумы приемников и любые немоделированные систематические ошибки, например, многолучевого распространения, остаточные орбитальные ошибки и т.д.
представляют кодовую и фазовую остаточные ошибки, соответственно, включая случайные шумы приемников и любые немоделированные систематические ошибки, например, многолучевого распространения, остаточные орбитальные ошибки и т.д.
Линеаризация двойной разности наблюдений фазы несущей может быть представлена следующим набором уравнений:
V k =HX-Z k (3)
где: Vk - приведенный вектор невязки в период k; Zk - невязка до приведения; H - план-матрица; и X - оцененный вектор состояния, включающий в себя три компонента местоположения, остаточные ионосферные и тропосферные отклонения, и двух или трех частотные неоднозначности. Оцененный вектор состояния X может необязательно включать в себя также компоненты скорости и ускорения. Значения для X хранятся в состояниях фильтра Калмана.
Как показано на Фиг.2, операции позиционирования/навигации RTK продолжаются проекциями фильтра Калмана и обновлениями 250 состояния. Если оценки фильтра Калмана после k-1 периодов представлены  с дисперсией
с дисперсией  , прогнозируемый вектор состояния в период k дается посредством:
, прогнозируемый вектор состояния в период k дается посредством:
 (4)
(4)
 (5)
(5)
где:  - прогнозируемый вектор состояния фильтра Калмана в период k на основе состояния фильтра Калмана в период k-1; Фk,k-1 - переходная матрица, которая соотносит Xk-1 с Xk; Wk - динамическая матрица, элементы которой являются последовательностью белого шума; Qk - - дисперсионно-ковариационная матрица прогнозируемого состояния фильтра Калмана в периоде k; и Qk-1 + - это оцененная дисперсионно-ковариационная матрица фильтра Калмана в периоде k-1.
- прогнозируемый вектор состояния фильтра Калмана в период k на основе состояния фильтра Калмана в период k-1; Фk,k-1 - переходная матрица, которая соотносит Xk-1 с Xk; Wk - динамическая матрица, элементы которой являются последовательностью белого шума; Qk - - дисперсионно-ковариационная матрица прогнозируемого состояния фильтра Калмана в периоде k; и Qk-1 + - это оцененная дисперсионно-ковариационная матрица фильтра Калмана в периоде k-1.
Для простоты, в последующих уравнениях нижний индекс k, представляющий период k, будет опускаться для  и
и  . Обновленный вектор состояния
. Обновленный вектор состояния  для периода k формируется с использованием вектора измерений Zk применением уравнения наблюдения:
для периода k формируется с использованием вектора измерений Zk применением уравнения наблюдения:
 (6)
(6)
где K - это матрица усилений, описанная ниже.  может быть выражен в следующей форме (уравнение (7) предназначено для систем, использующих двухчастотные приемники и уравнение (8) предназначено для трехчастотных приемников):
может быть выражен в следующей форме (уравнение (7) предназначено для систем, использующих двухчастотные приемники и уравнение (8) предназначено для трехчастотных приемников):
 (7)
(7)
 (8)
(8)
Матрица усиления это:
 (9)
(9)
где: R - дисперсионно-ковариационная матрица наблюдений (измерений); и  и
и  - соответственно, вектор прогнозируемого состояния фильтра Калмана и оцененный вектор состояния, в текущий период.
- соответственно, вектор прогнозируемого состояния фильтра Калмана и оцененный вектор состояния, в текущий период.
Дисперсионная ковариация Q+ вектора состояния задается:
 (10)
(10)
где: I - единичная матрица, Q+ может быть выражена в следующей форме (уравнение (11) для двухчастотных приемников и уравнение (12) для трехчастотных приемников):
 (11)
(11)
 (12)
(12)
Для определения "оптимального решения", иногда называемого "фиксированным решением неоднозначности", для значений неоднозначности, к вектору состояния добавляется ограничение:
X N =N k (13)
где XN представляет часть состояния фильтра Калмана, которая представляет значения неоднозначности для принятых спутниковых сигналов, и Nk - целочисленный вектор. Фиксированные результаты могут затем быть получены с использованием следующих уравнений:
 (14)
(14)
 (15)
(15)
Уравнение (14) представляет конечные скорректированные координаты местоположения после того, как значения плавающей неоднозначности модифицируются в соответствующие значения целочисленной неоднозначности. Уравнение (15) представляет конечную ковариацию координат местоположения после того, как плавающие неоднозначности фиксируются в соответствующих целочисленных значениях. Нижний индекс "c" в уравнениях (14) и (15) обозначает часть вектора состояния Калмана, связанного с координатами местоположения, тропосферными и ионосферными состояниями, и, где применимо, состояниями скорости и ускорения.
Процесс для получения или нахождения фиксированного решения неоднозначности включает в себя решение целочисленного уравнения наименьших квадратов:
 (16)
(16)
Для каждого различного целочисленного набора Nk будет получено различное значение Rk. Единственное значение получается для каждого варианта набора Nk целочисленных неоднозначностей. Оптимальный целочисленный набор Nk, удовлетворяющий уравнению (16), образующий наименьшее значение Rk, и также удовлетворяющий тесту различения, принимается как корректный набор целочисленной неоднозначности и используется для получения конечного фиксированного решения неоднозначности. Тест различения описывается ниже в отношении Фиг.3A.
Как показано на Фиг.2, тест выполняется при завершении каждой итерации или периода процесса 250 обновления фильтра Калмана. Если имеются какие-либо плавающие неоднозначности в измерениях 255 фазы несущей, процедура частичного поиска выполняется для разрешения 260 неоднозначности. В одном варианте осуществления способы поиска в оцененной области неоднозначности с использованием наименьших квадратов или оценки фильтра Калмана могут использоваться для разрешения неоднозначностей фазы несущей полного цикла. В одном варианте осуществления способы поиска в оцененной области неоднозначности могут быть реализованы для исходных параметров неоднозначности. В другом варианте осуществления способы поиска могут быть реализованы с использованием комбинаций исходных параметров.
В одном варианте осуществления для выполнения поиска с использованием пребразованных плавающих неоднозначностей может использоваться способ корректировки декорреляции неоднозначности методом наименьших квадратов (LAMBDA) (Teunissen, 1994). Преобразованные целочисленные неоднозначности строятся из исходных неоднозначностей и могут использоваться для восстановления исходных целочисленных неоднозначностей, как только определено решение для преобразованных целочисленных неоднозначностей. Преимущество этой процедуры состоит в том, что преобразованные плавающие неоднозначности имеют меньшие стандартные отклонения и имеется меньшее количество вариантов целочисленных наборов, и, таким образом, значительно уменьшается время вычисления. Способ LAMBDA включает в себя стратегию дискретного поиска для определения целочисленных неоднозначностей. Он отличается двумя различными процедурами для оценки целочисленной неоднозначности, включая сюда декорреляцию неоднозначности (или Z-преобразование), за которым следует дискретный поиск для целочисленных неоднозначностей (т.е. фактическая оценка целочисленной неоднозначности). Ключом к способу LAMBDA является вычисление матрицы преобразования для построения многоспутниковых комбинаций неоднозначности.
В некоторых вариантах осуществления, используется модифицированный способ LAMBDA (MLAMBDA) для целочисленной оценки методом наименьших квадратов. MLAMBDA включает в себя модифицированный процесс уменьшения Z матрицы и модифицированный процесс поиска (X.W Zhang, 2005). Матрица Z преобразования неоднозначности изменяет исходный вектор неоднозначности в преобразованный вектор неоднозначности, дисперсионно-ковариационная матрица которого имеет значительно меньшие диагональные элементы:
 (17)
(17)
 (18)
(18)
Поэтому уравнение (16) может быть переписано как
 (19)
(19)
Для различных целочисленных наборов  будут получены различные значения Rk. Таким образом, задача исходной оценки неоднозначности была изменена. Новая задача - это поиск целочисленного набора, который формирует и удовлетворяет как критерию достоверности, так и критерию отказа.
будут получены различные значения Rk. Таким образом, задача исходной оценки неоднозначности была изменена. Новая задача - это поиск целочисленного набора, который формирует и удовлетворяет как критерию достоверности, так и критерию отказа.
Для того, чтобы убедиться, что преобразованные значения неоднозначности имеют целочисленные характеристики, матрица Z преобразования имеет только целочисленные вхождения. Для того, чтобы убедиться, что исходные значения неоднозначности могут быть определены из преобразованных значений неоднозначности, обратная матрицы преобразования также имеет только целочисленные вхождения. Таким образом, матрица Z является допустимым преобразованием неоднозначности, если и только если матрица Z имеет целочисленные вхождения и ее определитель равен 1. Исходные неоднозначности восстанавливаются посредством
 (20)
(20)
Способы LAMBDA или MLAMBDA могут указываться ниже как просто способ LAMBDA.
Когда значения целочисленной неоднозначности, полученные способом LAMBDA или другим способом вычисления, не удовлетворяют тесту различения, для удаления одной или более неоднозначностей из набора неоднозначностей, подлежащего поиску, может быть выполнена процедура частичного поиска, уменьшающая время вычисления, необходимое для разрешения целочисленной неоднозначности. Концептуально, процесс частичного поиска удаляет из набора неоднозначностей одно или более из резко отклоняющихся значений. Резко отклоняющиеся значения могут быть связаны с зашумленными или поврежденными сигналами, или с сигналами от спутников, которые близки к горизонту. Удаление этих резко отклоняющихся значений часто обеспечивает процессу LAMBDA (или другому процессу определения целочисленной неоднозначности) возможность успешно определять, для оставшихся неоднозначностей, значения целочисленной неоднозначности, удовлетворяющие тесту различения. В одном варианте осуществления процедура частичного поиска устраняет одну или более неоднозначностей из целочисленного набора Nk. В другом варианте осуществления из процесса поиска устраняют измерения на основе сигналов, принятых от одного или более спутников. Процедура частичного поиска описывается подробно ниже.
Если процесс разрешения неоднозначности терпит неудачу, процедура может повторяться до тех пор, когда разрешение будет успешным. Если были протестированы все возможные наборы значений неоднозначности для пяти или более спутников и тест неоднозначности все еще не пройден, процедура разрешения неоднозначности в текущем периоде не выполнена, решение RTK сбрасывается 290, и сигналы от спутников принимаются 220 для следующего периода.
Однако если разрешение является успешным, операции позиционирования/навигации RTK продолжают мониторинг фильтра 270 Калмана, чтобы определять, превосходят ли остаточные отклонения предопределенный порог. Большие остаточные отклонения могут показывать, что проекции фильтра Калмана неверны и отрицательно влияют на измерения фазы несущей. Если определяется, что остаточные отклонения слишком велики (т.е. превосходят предопределенный порог или не удовлетворяют предопределенным критериям), решение RTK сбрасывается 290. Однако если определяется, что остаточные отклонения являются достаточно точными, измерения кода и фазы несущей обновляются 280, и сигналы от спутников принимаются 220 для следующего периода.
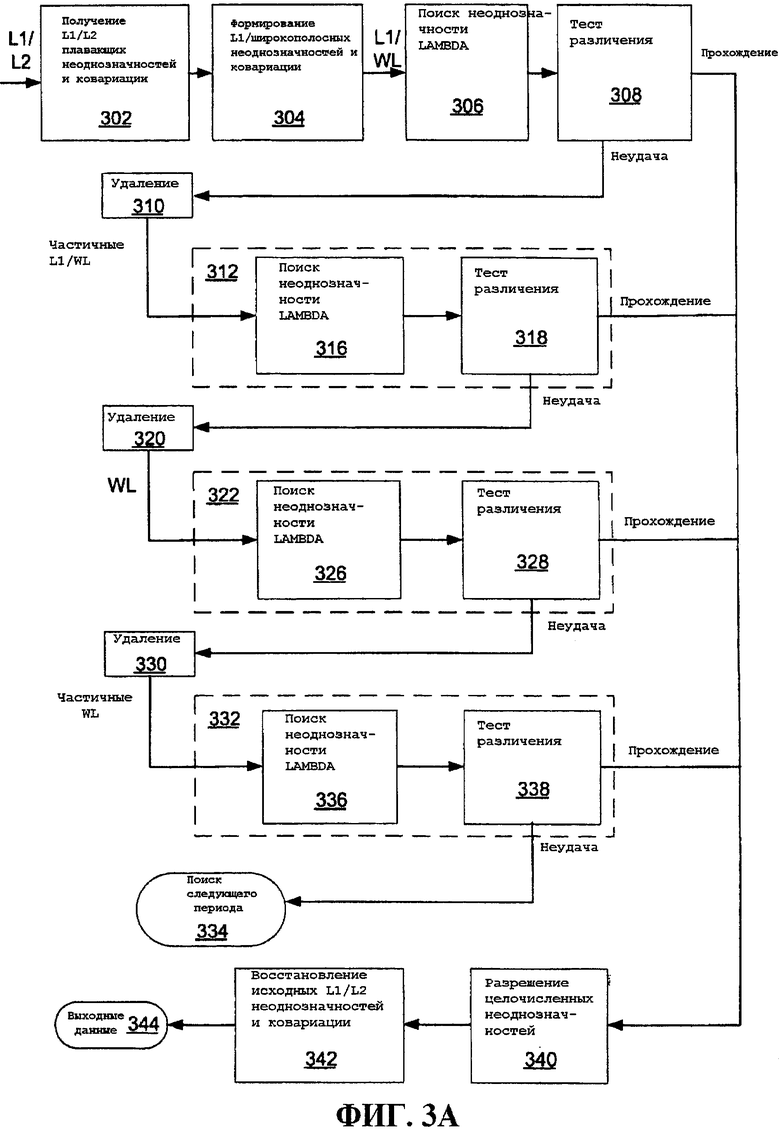
Фиг.3A иллюстрирует вычислительную последовательность частичного поиска для двухчастотной глобальной навигационной спутниковой системы. После того, как обрабатываются 240 (Фиг.2) измерения двойной разности от обеих частот, вектор значений плавающей неоднозначности и соответствующая дисперсионная матрица могут быть получены 302 из уравнений (5) и (7) из оценки 250 (Фиг.2) фильтра Калмана. Хотя плавающие неоднозначности L1 и L2 являются оцененными параметрами, пары неоднозначностей, подлежащие поиску в способе LAMBDA, могут быть различными. В одном варианте осуществления  и широкополосная
и широкополосная  неоднозначности выбираются для процесса поиска и формируются 304 из исходного вектора плавающей неоднозначности L1 и L2 уравнения (5) с использованием следующего уравнения:
неоднозначности выбираются для процесса поиска и формируются 304 из исходного вектора плавающей неоднозначности L1 и L2 уравнения (5) с использованием следующего уравнения:
 (21)
(21)
На основе уравнений (10) и (11), дисперсионно-ковариационная матрица значений неоднозначности  , и
, и  получается следующим образом:
получается следующим образом:
 (22)
(22)
Наилучший вариант набора и второй наилучший вариант набора, соответствующие двум наименьшим значениям Rk для и  , могут быть найдены с помощью процесса 306 поиска LAMBDA, как описано выше.
, могут быть найдены с помощью процесса 306 поиска LAMBDA, как описано выше.
Тест 308 различения включает в себя тест отношения наилучшего варианта набора и второго наилучшего вариант набора. В частности, для теста различения может использоваться эмпирическое значение отношения, равное 3. Тест отношения используется, так как чем больше отношение, тем больше шанс, что наилучший вариант набора является верным. В одном варианте осуществления в тест различения включается дополнительный тест совместимости. Тест совместимости пройден, если различие между фиксированным значением неоднозначности и значением плавающей неоднозначности является меньшим, чем три-пять стандартных отклонений плавающего решения. Если тест 308 различения пройден, наилучший вариант набора принимается как верный набор значений целочисленной неоднозначности, тем самым, разрешая набор неоднозначностей (который также может называться "набор значений неоднозначностей") 340, исходные L1/L2 или L1/L2/L5 сигналы восстанавливаются 342 (как описано ниже), и результирующее фиксированное решение выводится 344 с использованием уравнений (14) и (15).
Процедура частичного поиска применяется, когда наилучший вариант набора и второй наилучший вариант набора и не проходят тест 308 различения. В одном варианте осуществления способ частичного поиска должен исключать из набора неоднозначностей, значения которых определяются, те значения неоднозначности, для которых значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными. В другом варианте осуществления способ частичного поиска должен исключать те спутники, неоднозначности которых в наилучшем варианте набора и втором наилучшем варианте набора не являются идентичными. Этот второй подход, в действительности, удаляет из набора неоднозначностей все неоднозначности, удаленные в первом подходе, и любые родственные неоднозначности для спутников, которые имеют по меньшей мере одно значение неоднозначности, которое является отличным в наилучшем и втором наилучшем варианте наборов.
Как только набор неоднозначностей, подлежащих поиску, был уменьшен операцей 310 удаления, выполняется новый поиск 312, включающий процесс 316 поиска LAMBDA для наилучшего и второго наилучшего варианта наборов для уменьшенного набора неоднозначностей, полученного операцией 310, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 318 различения. Если тест 318 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 340, как описано выше.
В противном случае, если тест 318 различения не пройден, процедура переходит к операции 320 удаления, на которой все  значений неоднозначности удаляются из набора неоднозначностей, подлежащих поиску, в то время как все широкополосные неоднозначности удерживаются в наборе неоднозначностей (также называемом набором значений неоднозначностей), подлежащем поиску. Как только набор неоднозначностей, подлежащих поиску, был уменьшен операцией 320 удаления, выполняется новый поиск 322, включающий процесс 326 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора значений целочисленной неоднозначности, полученного операцией 320, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 328 различения. Если тест 328 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 340, как описано выше.
значений неоднозначности удаляются из набора неоднозначностей, подлежащих поиску, в то время как все широкополосные неоднозначности удерживаются в наборе неоднозначностей (также называемом набором значений неоднозначностей), подлежащем поиску. Как только набор неоднозначностей, подлежащих поиску, был уменьшен операцией 320 удаления, выполняется новый поиск 322, включающий процесс 326 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора значений целочисленной неоднозначности, полученного операцией 320, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 328 различения. Если тест 328 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 340, как описано выше.
В противном случае, если тест 328 различения не пройден, процедура переходит к операции 330 удаления, на которой все широкополосные неоднозначности, чьи целочисленные неоднозначности наилучшего варианта набора и второго наилучшего варианта набора (сформированных процессом 326 поиска LAMBDA) являются разными, удаляются из набора неоднозначностей, подлежащих поиску. Как отмечено выше, все неоднозначностей уже были удалены из набора неоднозначностей, подлежащих поиску, на операции 320 удаления. Для оставшихся широкополосных неоднозначностей выполняется новый поиск 322, включающий процесс 336 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей для уменьшенного набора неоднозначностей, полученных операцией 330, и для результирующих наилучшего и второго наилучшего вариантов набора выполняется тест 338 различения. Если тест 338 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 340, как описано выше. В противном случае, процесс поиска не выполнен для текущего периода и процесс начинается заново на следующем периоде 334 с использованием новых значений измерений для спутниковых сигналов.
Поиски 312, 322 и 332 и включают в себя нахождение наилучшего варианта набора целочисленных неоднозначностей и второго наилучшего варианта набора целочисленных неоднозначностей с помощью процесса 316, 326, 336 поиска LAMBDA и последующее применения теста 318, 328, 338 различения. В одном варианте осуществления в течение каждого периода процесс частичного поиска повторно применяется до тех пор, пока либо (A) в результате любого из процессов 310,320, 330 удаления не получен поисковый набор, имеющий значения неоднозначности для менее чем пяти спутников, либо (B) все поиски окончились неудачей, либо (C) поиск оказывается успешным, что показывает прохождение одним из наилучших вариантов набора целочисленных неоднозначностей, соответствующего теста 318, 328 или 338 различения.
Если тест 308, 318, 328 или 338 различения пройден, наилучший вариант набора, который прошел тест различения, принимается как верный набор неоднозначностей для разрешения целочисленных неоднозначностей 340 и формирования фиксированного решения 344 из уравнений (14) и (15).
В некоторых вариантах осуществления, как только наилучший вариант набора (который может содержать неполный набор значений целочисленной неоднозначности и вследствие применения одной или более операций 310, 320, 330 удаления) удовлетворяет тесту различения, исходные состояния неоднозначности L1 и L2 и ковариация в фильтре Калмана могут быть восстановлены 342 использованием следующих уравнений:
 (23)
(23)
 (24)
(24)
Отметим, что если является плавающим, но является фиксированным, то дробная часть и  является в точности одинаковой, и вариация
является в точности одинаковой, и вариация  ,
,  , и ковариация
, и ковариация  являются также одинаковыми. Если фиксируется позже, то фиксированные значения и
являются также одинаковыми. Если фиксируется позже, то фиксированные значения и  будут регулироваться до целочисленных значений и вариация и ковариация станут нулевыми.
будут регулироваться до целочисленных значений и вариация и ковариация станут нулевыми.
В одном варианте осуществления, если поиск был проведен по всем возможным набором целочисленных неоднозначностей и тест различения все еще не пройден, процедура разрешения неоднозначности в настоящий период не выполнена и процесс поиска подходящего набора значений неоднозначностей, удовлетворяющего тесту различения, возобновляется в следующем периоде 334, с использованием новых измерений спутниковых сигналов.
Фиг.3B иллюстрирует вычислительную последовательность частичного поиска для трехчастотной системы. После того, как измерения двойной разности от обеих частот обработаны 240 (Фиг.2), вектор плавающей неоднозначности и соответствующая вариация могут быть получены 351 из уравнений (5) и (8) из оценки 250 фильтра Калмана (Фиг.2). В одном варианте осуществления исходные состояния неоднозначности для частот L1, L2 и L5 преобразуются 352 в набор альтернативных комбинаций неоднозначности,  ,
,  , и
, и  :
:
 (25)
(25)
 (26)
(26)
Новые неоднозначности, которые являются результатом, исходной L1 неоднозначности и двух широкополосных неоднозначностей,  , и
, и  , одна между частотами L1 и L2 и другая между частотами L2 и L5. В других вариантах осуществления, могут использоваться другие комбинации состояний неоднозначности для частот L1, L2 и L5.
, одна между частотами L1 и L2 и другая между частотами L2 и L5. В других вариантах осуществления, могут использоваться другие комбинации состояний неоднозначности для частот L1, L2 и L5.
Наилучший вариант набора и второй наилучший вариант набора для  ,
,  , и
, и  могут быть найдены с помощью процесса 353 поиска LAMBDA, как описано выше. Тест 354 различения, применяется к наилучшему и второму наилучшему вариантам наборов целочисленных неоднозначностей. Как описано выше, тест 354 различения включает в себя тест отношения наилучшего варианта набора и второго наилучшего варианта набора. Если тест 354 различения пройден, наилучший вариант набора принимается как верный набор неоднозначностей для разрешения целочисленных неоднозначностей 390 и формирования фиксированного решения 394 из уравнений (14) и (15).
могут быть найдены с помощью процесса 353 поиска LAMBDA, как описано выше. Тест 354 различения, применяется к наилучшему и второму наилучшему вариантам наборов целочисленных неоднозначностей. Как описано выше, тест 354 различения включает в себя тест отношения наилучшего варианта набора и второго наилучшего варианта набора. Если тест 354 различения пройден, наилучший вариант набора принимается как верный набор неоднозначностей для разрешения целочисленных неоднозначностей 390 и формирования фиксированного решения 394 из уравнений (14) и (15).
Процедура частичного поиска применяется, когда наилучший вариант набора и второй наилучший вариант набора ,  , и
, и  не удовлетворяют тесту 354 различения. В одном варианте осуществления способ частичного поиска исключает из набора неоднозначностей, подлежащего поиску, те значения неоднозначности, чьи значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными. В другом варианте осуществления способ частичного поиска исключает те спутники, чьи целочисленные неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не являются идентичными. В еще одном варианте осуществления, одна или более неоднозначностей , для которых целочисленные неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными, удаляются из набора неоднозначностей, подлежащих поиску 360, в то время как все широкополосные неоднозначности и
не удовлетворяют тесту 354 различения. В одном варианте осуществления способ частичного поиска исключает из набора неоднозначностей, подлежащего поиску, те значения неоднозначности, чьи значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными. В другом варианте осуществления способ частичного поиска исключает те спутники, чьи целочисленные неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не являются идентичными. В еще одном варианте осуществления, одна или более неоднозначностей , для которых целочисленные неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными, удаляются из набора неоднозначностей, подлежащих поиску 360, в то время как все широкополосные неоднозначности и  остаются. В целях этого описания процедуры частичного поиска, будет предполагаться, что используется последний упомянутый способ.
остаются. В целях этого описания процедуры частичного поиска, будет предполагаться, что используется последний упомянутый способ.
Как только набор неоднозначностей, подлежащий поиску, был уменьшен операцией 360 удаления, выполняется новый поиск 362, включающий процесс 363 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора неоднозначностей, полученного операцией 360, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 364 различения. Если тест 364 различения пройден новым наилучшим вариантом набором, процедура переходит к операции 390, как описано выше.
В противном случае, если тест 364 различения не пройден, процедура переходит к операции 365 удаления, на которой все неоднозначности  удаляются из набора значений неоднозначностей, подлежащего поиску, в то время как все широкополосные неоднозначности
удаляются из набора значений неоднозначностей, подлежащего поиску, в то время как все широкополосные неоднозначности  и
и  удерживаются в наборе значений неоднозначностей, подлежащих поиску. Как только набор неоднозначностей, подлежащий поиску, был уменьшен операцией 365 удаления, выполняется новый поиск 366, включающий процесс 368 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора неоднозначностей, полученного операцией 365, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 369 различения. Если тест 369 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
удерживаются в наборе значений неоднозначностей, подлежащих поиску. Как только набор неоднозначностей, подлежащий поиску, был уменьшен операцией 365 удаления, выполняется новый поиск 366, включающий процесс 368 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора неоднозначностей, полученного операцией 365, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 369 различения. Если тест 369 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
В противном случае, если тест 369 различения не пройден, процедура переходит к операции 370 удаления, на которой одна или более из широкополосных неоднозначностей  , для которых значения в наилучшем варианте набора и втором наилучшем варианте набора не являются равными, удаляется из набора неоднозначностей, подлежащего поиску, в то время как все широкополосные неоднозначности
, для которых значения в наилучшем варианте набора и втором наилучшем варианте набора не являются равными, удаляется из набора неоднозначностей, подлежащего поиску, в то время как все широкополосные неоднозначности  удерживаются в наборе неоднозначностей, подлежащем поиску. В другом варианте осуществления роли двух широкополосных сигналов могут меняться в операции 370 удаления, в силу чего удаляется набор неоднозначностей
удерживаются в наборе неоднозначностей, подлежащем поиску. В другом варианте осуществления роли двух широкополосных сигналов могут меняться в операции 370 удаления, в силу чего удаляется набор неоднозначностей  для второго широкополосного сигнала, являющихся неодинаковыми в наилучшем и втором наилучшем вариантах набора, а все широкополосные неоднозначности для первого широкополосного сигнала удерживаются. Как только набор неоднозначностей, подлежащий поиску, был уменьшен операцией 370 удаления, выполняется новый поиск 372, включающий процесс 373 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора значений неоднозначностей, полученного операцией 370, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 374 различения. Если тест 374 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
для второго широкополосного сигнала, являющихся неодинаковыми в наилучшем и втором наилучшем вариантах набора, а все широкополосные неоднозначности для первого широкополосного сигнала удерживаются. Как только набор неоднозначностей, подлежащий поиску, был уменьшен операцией 370 удаления, выполняется новый поиск 372, включающий процесс 373 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора значений неоднозначностей, полученного операцией 370, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 374 различения. Если тест 374 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
В противном случае, если тест 374 различения не пройден, процедура переходит к операции 375 удаления, на которой все неоднозначности  для первого широкополосного сигнала удаляются из набора неоднозначностей, подлежащего поиску, в то время как все неоднозначности
для первого широкополосного сигнала удаляются из набора неоднозначностей, подлежащего поиску, в то время как все неоднозначности  для второго широкополосного сигнала удерживаются в наборе неоднозначностей, подлежащем поиску. Как только набор неоднозначностей, подлежащий поиску, был уменьшен операцией 375 удаления, выполняется новый поиск 376, включающий процесс 378 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора неоднозначностей, полученного операцией 375, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 379 различения. Если тест 379 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
для второго широкополосного сигнала удерживаются в наборе неоднозначностей, подлежащем поиску. Как только набор неоднозначностей, подлежащий поиску, был уменьшен операцией 375 удаления, выполняется новый поиск 376, включающий процесс 378 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора неоднозначностей, полученного операцией 375, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 379 различения. Если тест 379 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
В противном случае, если тест 379 различения не пройден, процедура переходит к операции 380 удаления, на которой одна или более неоднозначностей  , для которых значения в наилучшем варианте набора и втором наилучшем варианте набора кандидатов не являются равными, удаляется из набора неоднозначностей, подлежащего поиску. Как только набор неоднозначностей, подлежащий поиску, уменьшается операцией 380 удаления, выполняется новый поиск 382, включающий процесс 383 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора неоднозначностей, полученного операцией 380 удаления, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 384 различения. Если тест 384 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
, для которых значения в наилучшем варианте набора и втором наилучшем варианте набора кандидатов не являются равными, удаляется из набора неоднозначностей, подлежащего поиску. Как только набор неоднозначностей, подлежащий поиску, уменьшается операцией 380 удаления, выполняется новый поиск 382, включающий процесс 383 поиска LAMBDA для наилучшего и второго наилучшего вариантов набора для уменьшенного набора неоднозначностей, полученного операцией 380 удаления, и для результирующих наилучшего и второго наилучшего вариантов набора целочисленных неоднозначностей выполняется тест 384 различения. Если тест 384 различения пройден новым наилучшим вариантом набора, процедура переходит к операции 390, как описано выше.
Если тест 384 различения не пройден для нового наилучшего варианта набора, процесс поиска не выполнен для текущего периода и процесс начинается заново на следующем периоде 334 с использованием новых значений измерений для спутниковых сигналов.
В одном варианте осуществления в течение каждого периода процесс частичного поиска применяется повторно, как описано выше со ссылкой на Фиг.3B, до тех пор, пока либо (A) в результате какого-либо из процессов 360, 365, 370, 375 или 380 удаления не получен набор поиска, имеющий значения неоднозначности для менее чем пяти спутников, либо (B) все поиски окончились неудачей, либо (C) поиск оказывается успешным, что показывает прохождение одним из наилучших вариантов набора целочисленных неоднозначностей соответствующего теста 364, 369, 374, 379, или 384 различения. Если тест различения пройден, наилучший вариант набора будет принят как верный набор неоднозначностей для разрешения целочисленных неоднозначностей 390 и формирования фиксированного решения 394 из уравнений (14) и (15).
В одном варианте осуществления после того, как все или частичные наборы ,  и фиксируются, исходные неоднозначности L1, L2 и L5 и соответствующие вариации могут быть восстановлены следующим образом:
и фиксируются, исходные неоднозначности L1, L2 и L5 и соответствующие вариации могут быть восстановлены следующим образом:
 (27)
(27)
 (28)
(28)
В одном варианте осуществления, если поиск набора значений целочисленной неоднозначности, удовлетворяющего тесту различения, оканчивается неудачей, процедура разрешения неоднозначности в настоящий период не выполнена и процесс поиска подходящего набора значений неоднозначностей, удовлетворяющего тесту различения, возобновляется в следующем периоде 385, с использованием новых измерений спутниковых сигналов.
Фиг.4A-C иллюстрируют способ 400 для выполнения разрешения целочисленной неоднозначности методом частичного поиска. Как показано на Фиг.4A, способ 400 включает в себя идентификацию набора спутников, сигналы которых принимаются 410. Набор спутников обычно включает в себя только те спутники, для которых измерения фазы несущей делаются успешно. Идентифицируется 420 набор плавающих неоднозначностей, связанных с измерениями фазы несущей, по меньшей мере, некоторых сигналов.
Оцениваются целочисленные неоднозначности для набора плавающих неоднозначностей, и определяются 430 наилучший вариант набора и второй наилучший вариант набора значений целочисленных неоднозначностей для неоднозначностей в наборе неоднозначностей. Если в наборе неоднозначностей представлены все спутники, для которых были сделаны измерения несущего сигнала, то для каждого спутника в наборе спутников будут определены, по меньшей мере, один наилучший вариант и один второй наилучший вариант целочисленной неоднозначности. В одном варианте осуществления наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя значение целочисленной неоднозначности для соответствующего несущего сигнала 432. В другом варианте осуществления наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя значение целочисленной неоднозначности для соответствующего широкополосного сигнала 434. В одном варианте осуществления наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя значение целочисленной неоднозначности для соответствующего широкополосного сигнала и значение целочисленной неоднозначности для соответствующего несущего сигнала 436. В еще одном варианте осуществления, наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя значение целочисленной неоднозначности для соответствующего первого и второго широкополосных сигналов и значение целочисленной неоднозначности для соответствующего несущего сигнала 438.
Согласно Фиг.4A и 4B, как только определяется, что наилучший вариант набора значений целочисленной неоднозначности не удовлетворяет тесту 440 различения, из набора плавающих неоднозначностей в соответствии с предопределенными критериями 450 удалением формируется уменьшенный набор неоднозначностей. В одном варианте осуществления предопределенные критерии могут определять удаление каждой неоднозначности, чьи целочисленные неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными 452. В другом варианте осуществления удаляются 454 все неоднозначности для спутника, если какие-либо из целочисленных неоднозначностей в наилучшем варианте набора и втором наилучшем варианте набора для этого спутника не являются идентичными. В некоторых вариантах осуществления, уменьшенный набор неоднозначностей ассоциируется с сигналами от, по меньшей мере, предопределенного минимального количества спутников 456. Например, в некоторых вариантах осуществления предопределенное минимальное количество спутников равно пяти 458. Согласно Фиг.4C, способ 400 продолжается набором операций 460 для разрешения целочисленных неоднозначностей в уменьшенном наборе неоднозначностей.
В одном варианте осуществления операции 460 включают в себя две или более из операций 462-469, описанных далее. В операции 462 оцениваются целочисленные неоднозначности в уменьшенном наборе плавающих неоднозначностей, и определяются наилучший вариант набора и второй наилучший вариант набора значений целочисленной неоднозначности для каждой из неоднозначностей в уменьшенном наборе плавающих неоднозначностей. В одном варианте осуществления наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя первое и второе значения целочисленной неоднозначности для соответствующих первого и второго широкополосных сигналов 463. В операции 464, определяется, удовлетворяет ли наилучший вариант набора неоднозначностей тесту различения. Если тест различения не пройден, второй уменьшенный набор неоднозначностей вырабатывается 466 удалением из уменьшенного набора неоднозначностей в соответствии с предопределенными критериями. В одном варианте осуществления предопределенными критериями является удаление каждой неоднозначности, чьи целочисленные неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными 467. В другом варианте осуществления операция 466 удаления включает в себя удаление всех неоднозначностей для спутника, чьи целочисленные неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются разными 469. В операции 468 выполняются операции для разрешения целочисленных неоднозначностей во втором уменьшенном наборе неоднозначностей.
Формируются 470 выходные данные. В одном варианте осуществления это включает в себя формирование выходных данных (например, набора значений целочисленной неоднозначности, подлежащих использованию для навигации) при условии, тест различения пройден 472.
Фиг.5 иллюстрирует один вариант осуществления компьютерной системы 100. Компьютерная система 100 включает в себя сигнальный процессор 520, по меньшей мере, один процессор 530 и память 150. Память 150, которая может включать в себя высокоскоростное оперативное запоминающее устройство и может также включать в себя энергонезависимую память, такую как один или более магнитный дисковый накопитель, EEPROM и/или флэш EEPROM, включает в себя операционную систему 152, измерения 157 фазы несущей и псевдодальности, программу 560 обновления фильтра Калмана, состояние 570 фильтра Калмана (включая сюда значения 572 неоднозначностей и, по меньшей мере, один программный модуль 155 разрешения целочисленных неоднозначностей, исполняемый процессором 530). Программный модуль 155 разрешения целочисленных неоднозначностей включает в себя, по меньшей мере, одну программу 552 поиска целочисленной неоднозначности, по меньшей мере, одну программу 554 теста различения и, по меньшей мере, одну программу 556 уменьшения набора неоднозначностей. В некоторых вариантах осуществления может быть более чем один процессор 530. В других вариантах осуществления, компьютерная система 200 может включать в себя специализированную интегральную схему (ASIC), выполняющую некоторую или всю функциональность программного модуля 155 разрешения целочисленной неоднозначности.
В некоторых вариантах осуществления, компьютерная система 100 соединена с одним или более приемниками 510, такими как пользовательский GPS-приемник 120 (Фиг.1). Один или более приемников 510 могут также включать в себя приемник, который принимает поправочные данные от одного или более опорных приемников или от широкозонной усиливающей системы (WAAS), такой как StarFire™ Network компании Navcom Technology Inc. В других вариантах осуществления, компьютерная система 100 и приемник 510 интегрируются в единое устройство. Более того, в некоторых вариантах осуществления, сигнальный процессор 520 интегрируется с GPS 120, который может быть или может не быть частью компьютерной системы 100.
Предшествующее описание в целях объяснения было дано со ссылкой на конкретные варианты осуществления. Однако иллюстративные описания выше не предполагаются исчерпывающими или ограничивающими настоящее изобретение до раскрытых точных форм. Многие модификации и изменения возможны в виду вышеизложенных описаний. Варианты осуществления были выбраны и описаны для того, чтобы наилучшим образом объяснить принципы этого изобретения и его практические приложения, чтобы, тем самым, обеспечивать возможность другим специалистам в данной области техники наилучшим образом использовать это изобретение и различные варианты осуществления с различными модификациями, подходящими для конкретного предполагаемого использования.
Изобретение относится к области радиотехники, а именно к системам позиционирования, и может быть использовано в мобильных приемниках в составе таких систем. Технический результат заключается в обеспечении возможности разрешения целочисленной неоднозначности с большей скоростью, для приложений повышенной дальности и в проблемных средах. Для этого идентифицируется (этап 420 на Фиг.4А) набор неоднозначностей, связанных с измерениями фазы несущей, по меньшей мере, некоторых из сигналов, принятых от спутников в идентифицированном наборе спутников. Целочисленные неоднозначности оцениваются, и определяются (этап 430) наилучший вариант набора и второй наилучший вариант набора значений целочисленной неоднозначности. При определении, что наилучший набор значений целочисленной неоднозначности не удовлетворяет тесту различения (этап 440), каждая неоднозначность, для которой значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не удовлетворяют предопределенным критериям, удаляются из набора неоднозначностей для получения уменьшенного набора неоднозначностей (этап 450 на Фиг.4В). Целочисленные неоднозначности в уменьшенном наборе неоднозначностей затем разрешаются (этап 468 на Фиг.4С) и формируются выходные данные в соответствии с разрешенными целочисленными неоднозначностями (этап 470 на Фиг.4С). 2 н. и 23 з.п. ф-лы, 8 ил.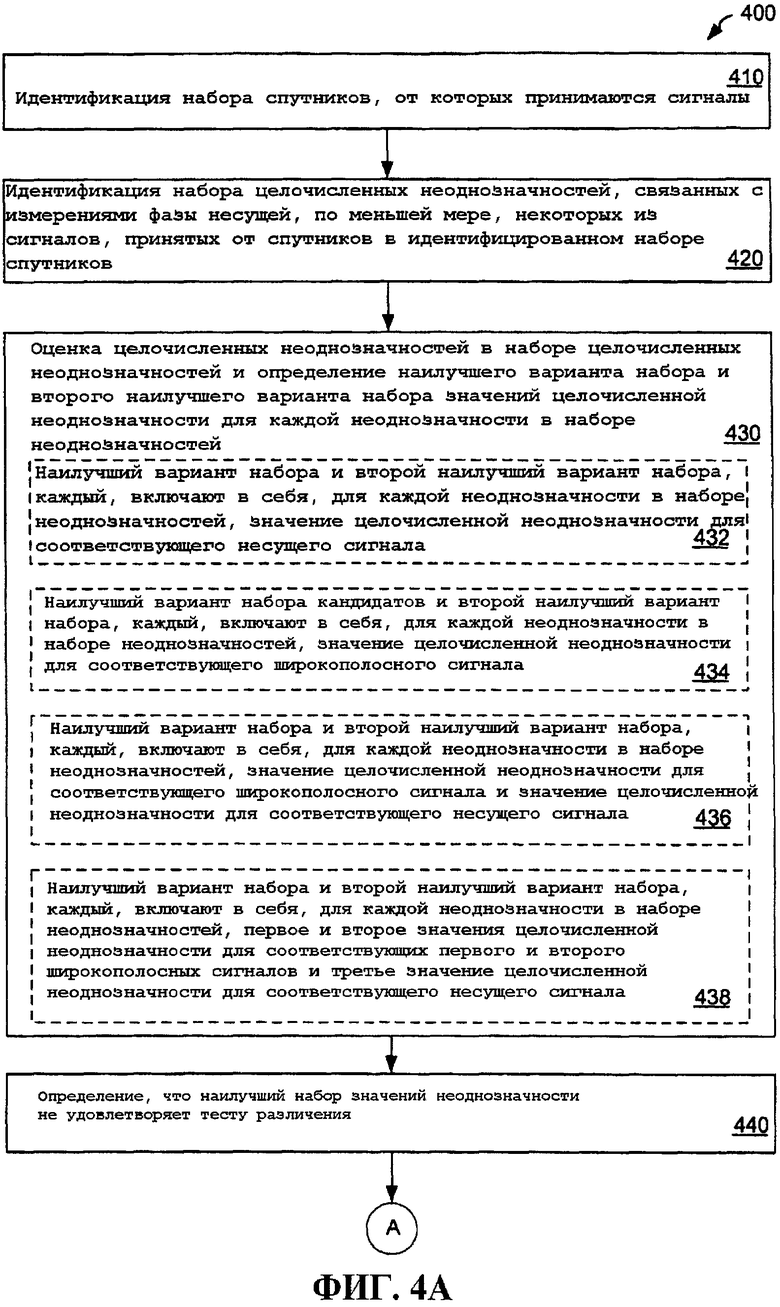
1. Способ выполнения разрешения целочисленной неоднозначности в глобальной навигационной спутниковой системе, содержащий этапы, на которых:
идентифицируют набор спутников, от которых принимаются несущие сигналы;
идентифицируют набор неоднозначностей, связанных с измерениями фазы несущей, по меньшей мере, некоторых из сигналов, принятых от спутников в идентифицированном наборе спутников;
оценивают целочисленные неоднозначности в наборе неоднозначностей, в том числе определяют наилучший вариант набора и второй наилучший вариант набора значений целочисленной неоднозначности для каждой из неоднозначностей в наборе неоднозначностей, где первый наилучший вариант набора и второй наилучший вариант набора, каждый, относятся к набору наименьших значений дисперсионно-ковариационной матрицы для измерений фазы несущей, который удовлетворяет целочисленному уравнению наименьших квадратов;
при определении, что наилучший вариант набора значений целочисленной неоднозначности не удовлетворяет тесту различения по отношению к второму наилучшему варианту набора, удаляют из набора неоднозначностей каждую неоднозначность, для которой значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не удовлетворяют предопределенным критериям, чтобы получить уменьшенный набор неоднозначностей, где наилучший вариант набора имеет больший шанс пройти тест различения, если отношение наилучшего варианта набора и второго наилучшего варианта набора больше, чем эмпирическое значение отношения;
выполняют операции для разрешения неоднозначностей в уменьшенном наборе неоднозначностей; и
формируют выходные данные в соответствии с результатом операций, выполненных для разрешения неоднозначностей в уменьшенном наборе неоднозначностей.
2. Способ по п.1, в котором предопределенные критерии содержат требование, что для соответствующей неоднозначности значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора являются равными.
3. Способ по п.1, в котором неоднозначности уменьшенного набора неоднозначностей связаны с измерениями фазы несущей несущих сигналов, принятых, по меньшей мере, от предопределенного минимального количества спутников, требуемого для мгновенного разрешения неоднозначности.
4. Способ по п.3, в котором предопределенное минимальное количество спутников равно пяти.
5. Способ по п.1, в котором наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя для каждой неоднозначности в наборе неоднозначностей значение целочисленной неоднозначности для соответствующего несущего сигнала.
6. Способ по п.1, в котором идентифицирование набора неоднозначностей включает в себя идентифицирование соответствующих широкополосных неоднозначностей, соответствующих соответственным спутникам в идентифицированном наборе спутников; где наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя значения целочисленной неоднозначности для соответствующих широкополосных неоднозначностей.
7. Способ по п.1, в котором идентифицирование набора неоднозначностей включает в себя идентифицирование соответствующих широкополосных неоднозначностей, соответствующих соответственным спутникам в идентифицированном наборе спутников, и соответствующих неоднозначностей несущих сигналов, соответствующих соответственным несущим сигналам; где наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя для каждого спутника в идентифицированном наборе спутников значение целочисленной неоднозначности для соответствующей широкополосной неоднозначности и значение целочисленной неоднозначности для соответствующей неоднозначности несущего сигнала.
8. Способ по п.1, в котором идентифицирование набора неоднозначностей включает в себя для соответствующих спутников в идентифицированном наборе спутников идентифицирование первой и второй соответствующих широкополосных неоднозначностей и дополнительно содержит идентифицирование соответствующих неоднозначностей несущих сигналов, соответствующих соответственным несущим сигналам; где наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя для каждого спутника в идентифицированном наборе спутников первое и второе значения целочисленной неоднозначности для соответствующих первой и второй широкополосных неоднозначностей и значение целочисленной неоднозначности для соответствующей неоднозначности несущего сигнала.
9. Способ по п.1, в котором этап удаления включает в себя удаление из набора неоднозначностей всех неоднозначностей для спутника, для которого значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не удовлетворяют предопределенным критериям.
10. Способ по п.1, в котором глобальная навигационная спутниковая система выбирается из группы, состоящей из глобальной системы позиционирования (GPS), глобальной орбитальной навигационной спутниковой системы (GLONASS) и системы позиционирования GALILEO.
11. Способ по п.1, в котором выполнение операций по разрешению неоднозначностей в уменьшенном наборе неоднозначностей включает в себя этапы, на которых:
оценивают целочисленные неоднозначности в уменьшенном наборе неоднозначностей, в том числе определяют наилучший вариант набора и второй наилучший вариант набора значений целочисленных неоднозначностей для каждой из целочисленных неоднозначностей в уменьшенном наборе неоднозначностей, где первый наилучший вариант набора и второй наилучший вариант набора, каждый, относятся к набору наименьших значений дисперсионно-ковариационной матрицы для измерений фазы несущей, который удовлетворяет целочисленному уравнению наименьших квадратов;
определяют, удовлетворяет ли наилучший вариант набора значений целочисленных неоднозначностей для уменьшенного набора неоднозначностей тесту различения по отношению к второму наилучшему варианту набора значений целочисленных неоднозначностей для уменьшенного набора неоднозначностей, и, если тест различения удовлетворен или пройден, формируют набор результирующих значений;
если наилучший вариант набора значений целочисленных неоднозначностей для уменьшенного набора неоднозначностей не удовлетворяет тесту различения, удаляют из уменьшенного набора неоднозначностей каждую неоднозначность, для которой значения целочисленных неоднозначностей в наилучшем варианте набора значений целочисленных неоднозначностей для уменьшенного набора неоднозначностей и втором наилучшем варианте набора не удовлетворяют предопределенным критериям, чтобы получить второй уменьшенный набор неоднозначностей;
выполняют операции для разрешения целочисленных неоднозначностей во втором уменьшенном наборе неоднозначностей; и
формируют выходные данные в соответствии с результатом операций, выполненных для разрешения целочисленных неоднозначностей во втором уменьшенном наборе неоднозначностей.
12. Способ по п.11, в котором идентифицирование набора неоднозначностей включает в себя идентифицирование соответствующих широкополосных неоднозначностей, соответствующих соответственным спутникам в идентифицированном наборе спутников; где наилучший вариант набора и второй наилучший вариант набора значений целочисленных неоднозначностей для уменьшенного набора неоднозначностей, каждый, включают в себя первое и второе значения целочисленной неоднозначности для соответствующих первой и второй широкополосных неоднозначностей.
13. Способ по п.1, в котором тест различения дополнительно содержит тест совместимости, который проходится, если различие между фиксированным значением неоднозначности и соответствующим значением плавающей неоднозначности меньше, чем заданное целое кратное стандартного отклонения плавающего решения.
14. Устройство для выполнения разрешения неоднозначности в глобальной навигационной спутниковой системе, содержащее:
приемник, выполненный с возможностью приема спутниковых сигналов;
один или более процессоров для разрешения неоднозначностей, связанных с измерениями фазы несущей, по меньшей мере, некоторых из сигналов, принятых от спутников в идентифицированном наборе спутников, при этом упомянутые один или более процессоров оценивают целочисленные неоднозначности в наборе неоднозначностей, включая определение наилучшего варианта набора и второго наилучшего варианта набора значений целочисленной неоднозначности для каждой из неоднозначностей в наборе неоднозначностей, причем один или более процессоров связаны с приемником;
фильтр Калмана, исполняемый одним или более процессорами для определения, что наилучший набор значений целочисленной неоднозначности не удовлетворяет тесту различения по отношению к второму наилучшему варианту набора, и, при таком определении, удаление из набора неоднозначностей каждой неоднозначности, для которой значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не удовлетворяют предопределенным критериям, для получения уменьшенного набора неоднозначностей, где наилучший вариант набора имеет больший шанс пройти тест различения, если отношение наилучшего варианта набора и второго наилучшего варианта набора равно или больше, чем эмпирическое значение отношения; и
один или более процессоров или схему для разрешения целочисленных неоднозначностей в уменьшенном наборе неоднозначностей.
15. Устройство по п.14, в котором неоднозначности уменьшенного набора неоднозначностей связаны с измерениями фазы несущей несущих сигналов, принятых от, по меньшей мере, предопределенного минимального количества спутников, требуемого для мгновенного разрешения неоднозначности.
16. Устройство по п.15, в котором предопределенное минимальное количество спутников равно пяти.
17. Устройство по п.14, в котором наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя, для каждой неоднозначности в наборе неоднозначностей, значение целочисленной неоднозначности для соответствующего несущего сигнала.
18. Устройство по п.14, в котором наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя значения целочисленной неоднозначности для соответствующих широкополосных неоднозначностей.
19. Устройство по п.14, в котором наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя для каждого спутника в идентифицированном наборе спутников значение целочисленной неоднозначности для соответствующей широкополосной неоднозначности и значение целочисленной неоднозначности для соответствующей неоднозначности несущего сигнала.
20. Устройство по п.14, в котором наилучший вариант набора и второй наилучший вариант набора, каждый, включают в себя для каждого спутника в идентифицированном наборе спутников первое и второе значения целочисленной неоднозначности для соответствующих первой и второй широкополосных неоднозначностей и значение целочисленной неоднозначности для соответствующей неоднозначности несущего сигнала.
21. Устройство по п.14, в котором один или более процессоров данных или фильтр Калмана удаляет из набора целочисленных неоднозначностей все целочисленные неоднозначности для спутника, для которого значения целочисленной неоднозначности в наилучшем варианте набора и втором наилучшем варианте набора не удовлетворяют предопределенным критериям.
22. Устройство по п.14, в котором глобальная навигационная спутниковая система выбрана из группы, состоящей из глобальной системы позиционирования (GPS), глобальной орбитальной навигационной спутниковой системы (GLONASS) и системы позиционирования GALILEO.
23. Устройство по п.14, в котором один или более процессоров данных выполнены с возможностью формирования выходных данных в соответствии с результатом операций, выполняемых для разрешения целочисленных неоднозначностей во втором уменьшенном наборе неоднозначностей.
24. Устройство по п.23, в котором наилучший вариант набора и второй наилучший вариант набора значений целочисленных неоднозначностей для уменьшенного набора неоднозначностей, каждый, включают в себя первое и второе значения целочисленной неоднозначности для соответствующих первой и второй широкополосных неоднозначностей.
25. Устройство по п.14, в котором тест различения дополнительно содержит тест совместимости, который проходится, если различие между фиксированным значением неоднозначности и соответствующим значением плавающей неоднозначности меньше, чем заданное целое кратное стандартного отклонения плавающего решения.
| L.Dai, D.Eslinger, T.Sharpe "Innovative Algorithms to Improve Long Range RTK Reliability and Availability", Proceedings of the 2007 National Technical Meeting of the Institute of Navigation, c.860-872, 24.01.2007 | |||
| СПОСОБ РАЗРЕШЕНИЯ ФАЗОВЫХ НЕОДНОЗНАЧНОСТЕЙ | 2005 |
|
RU2295737C1 |
| US 2005001762 A1, 06.01.2005 | |||
| US 6753810 B1, 22.06.2004 | |||
| US 2006012516 A1, 19.01.2006 | |||
| P.J | |||
| de Jonge, | |||

