Изобретение относится к системам радиолокационного обнаружения воздушных объектов (ВО), в частности к устройствам обнаружения и измерения параметров движения беспилотных летательных аппаратов (БпЛА) с малой радиолокационной заметностью.
Известно радиолокационное устройство обнаружения малозаметных ВО, в том числе и БпЛА [1], содержащее генератор, соединенный своим выходом со входами G умножителей частоты (УЧ), выход каждого g-го из которых связан с первым входом соответствующего g-го усилителя мощности (УМ), второй вход каждого g-го из G УМ подключен к выходу модулятора, а выход каждого g-го из G УМ соединен через соответствующий g-й вход антенного переключателя (АП) с антенной, содержащее также G приемников, вход каждого g-го из которых подключен к соответствующему выходу АП, а выход каждого g-го из которых - к первому входу соответствующего g-го фазового детектора (ФД), второй вход каждого g-го из G ФД связан с выходом соответствующего g-го УЧ, выход каждого из которых соединен со входом соответствующего g-го пересчетного устройства, выход каждого g-го пересчетного устройства с первого по (G-1)-e подключен к первому входу соответствующего g-го усилителя разностного сигнала (УРС), а выход каждого g-го пересчетного устройства со второго по G-e соединен со вторым входом соответствующего (g-1)-го УРС, причем выход каждого g-го из (G-1) УРС подключен к соответствующему g-му входу электронно-вычислительной машины (ЭВМ), выход которой соединен со входом устройства отображения (УО).
Данное устройство обнаружения использует для своей работы эффект возрастания мощности отраженных ВО сигналов при возникновении резонанса рассеяния радиоволн. Для получения резонансного отражения радиоволн в устройстве [1] формируются зондирующие сигналы на кратных частотах. Генератор формирует электромагнитные колебания на частоте ƒ0, а с помощью умножителей частоты они преобразуются в колебания на частотах 3ƒ0, 4ƒ0, 5ƒ0, …, gƒ0. Предполагается, что длина волны λ на выходе одного из УЧ будет совпадать с удвоенным размером ВО, что обеспечит возникновение резонансного отражения (рассеяния) [2]. Для типовых ВО (самолет, аэростат, вертолет) проявление резонансного отражения или рассеяния приведет к резкому возрастанию мощности (амплитуды) отраженных радиолокационных сигналов. А в случае облучения слабоотражающих ВО резонанс приведет к возможности их обнаружения по критерию превышения отраженным сигналом порогового уровня, определяемого чувствительностью приемников [3]. При отсутствии резонанса на выходе соответствующего приемника полезный сигнал будет слабым и ВО не будет обнаруживаться. Устройство [1], кроме того, может быть применено для классификации ВО по размерам. Для этого длины волн излучения подбирают таким образом, чтобы они были соизмеримы с удвоенным поперечным размером ВО разных классов. При совпадении размера ВО с половиной длины волны λ/2 одного из многочастотных сигналов, объект проявляет себя как параллельный контур с резонансом токов. Резкое изменение фазы отраженных волн при резонансе фиксируется выходным напряжением одного из фазовых детекторов, что позволяет отличать ВО с размером в половину λ на одной из частот от остальных ВО, т.е. различать объекты по размеру.
При классификации объектов пачка преобразованных отраженных сигналов, снятая с выходов (G-1) УРС, по близости к одному из эталонов характеризует принадлежность ВО к определенному классу или типу, а при обнаружении - возникновение откликов на выходе одного или двух УРС позволяет зафиксировать факт наличия малозаметного ВО в поле зрения радиолокационного устройства.
Недостатком устройства [1] является то, что частота зондирующих сигналов, сформированных в разных УЧ, меняется дискретно с шагом перестройки, равным начальной частоте ƒ0=50 МГц. Зондирующие сигналы формируются в устройстве [1] на частотах 150 МГц, 200 МГц, 250 МГц, 300 МГц и т.д. до 50×G МГц. Это соответствует возникновению резонанса при поперечных размерах ВО 1 м; 0,75 м; 0,6 м; 0,5 м; 0,43 м и т.д. Таким образом, существуют пропуски в диапазонах частот излучения, что не позволяет гарантировать выявления отражений в резонансной области. В то же время ВО, изменяя свой ракурс относительно радиолокатора, могут характеризоваться разными поперечными размерами, не совпадающими с установленной шкалой резонансных размеров. А при уменьшении частоты ƒ0 с целью более детального анализа отражений на различных частотах число УЧ, приемников, УМ, ФД и т.д. (т.е. каналов обработки) становится слишком большим, что приводит к громоздкости устройства обнаружения [1]. К тому же согласно схеме радиолокационные сигналы на разных частотах излучаются в пространство одновременно, что может приводить к возникновению при отражении биений, комбинационных составляющих и т.п., проникающих в соответствующие приемники и приводящие к ошибкам обнаружения ВО.
Известно также радиолокационное устройство [4] обнаружения беспилотных летательных аппаратов, включающее в свой состав антенну, перестраиваемый гетеродин, электронно-вычислительную машину (ЭВМ), вычислитель на программируемых логических интегральных схемах (ПЛИС), последовательно соединенные цифро-аналоговый преобразователь (ЦАП), первый фильтр сигналов промежуточной частоты (ФСПЧ), первый усилитель промежуточной частоты (УПЧ), первый смеситель, первый управляемый фильтр, предварительный усилитель мощности (ПУМ), усилитель мощности (УМ), антенный переключатель (АП), широкополосный усилитель высокой частоты (ШУВЧ), второй управляемый фильтр (УФ), второй смеситель, второй усилитель промежуточной частоты, второй ФСПЧ, аналого-цифровой преобразователь (АЦП), причем вход-выход антенного переключателя соединен с вход-выходом антенны, выход перестраиваемого гетеродина подключен ко второму входу первого смесителя и второму входу второго смесителя, в состав вычислителя на программируемых логических интегральных схемах входят схема управления (СУ), генератор тактовых сигналов (ГТС), формирователь импульсных сигналов (ФИС), последовательно соединенные цифровой фазовый детектор, блок первичного суммирования (БПС), блок вторичного суммирования (БВС), блок быстрого преобразования Фурье, блок сложения спектров (БСС), причем выход генератора тактовых сигналов связан со входом ФИС и вторыми входами АЦП и цифрового ФД, выход блока сложения спектров соединен со входом ЭВМ, выход которой связан со входом схемы управления, выход которой подключен ко входу перестраиваемого гетеродина и вторым входам первого и второго управляемых фильтров. При этом ШУВЧ, второй управляемый фильтр, второй смеситель, второй УПЧ, второй ФСПЧ являются элементами приемника.
Недостатком устройства [4] является то, что антенна на разных несущих частотах зондирования имеет разные коэффициенты усиления, то есть неравномерную частотную характеристику, что приводит к падениям уровня принимаемых сигналов на некоторых частотах и ухудшению параметров обнаружения объектов.
Задачей изобретения является совершенствование известного радиолокационного устройства обнаружения беспилотных летательных аппаратов на основе учета неравномерности частотной характеристики антенны.
Для решения этой задачи предлагается в состав известного устройства [4] дополнительно ввести УПЧ с внешним управлением (УПЧВУ) и цифровой блок регулировки усиления (БРУ), конструктивно входящий в состав вычислителя на ПЛИС. При этом предлагается выход схемы управления подключить ко входу БРУ, выход которого соединить со вторым входом УПЧВУ, первый вход которого соединить с выходом второго смесителя, а выход УПЧВУ подключить ко входу второго ФСПЧ.
При таком построении схемы на основе сигналов управления из схемы управления БРУ будет вырабатывать цифровые команды для регулировки коэффициента усиления УПЧВУ и таким образом устранять негативные последствия проявления неравномерности частотной характеристики антенны. За счет такого дополнения и изменения схемы новое устройство будет способно более качественно обнаруживать слабозаметные БпЛА, не теряя при этом возможности обнаруживать типовые ВО.
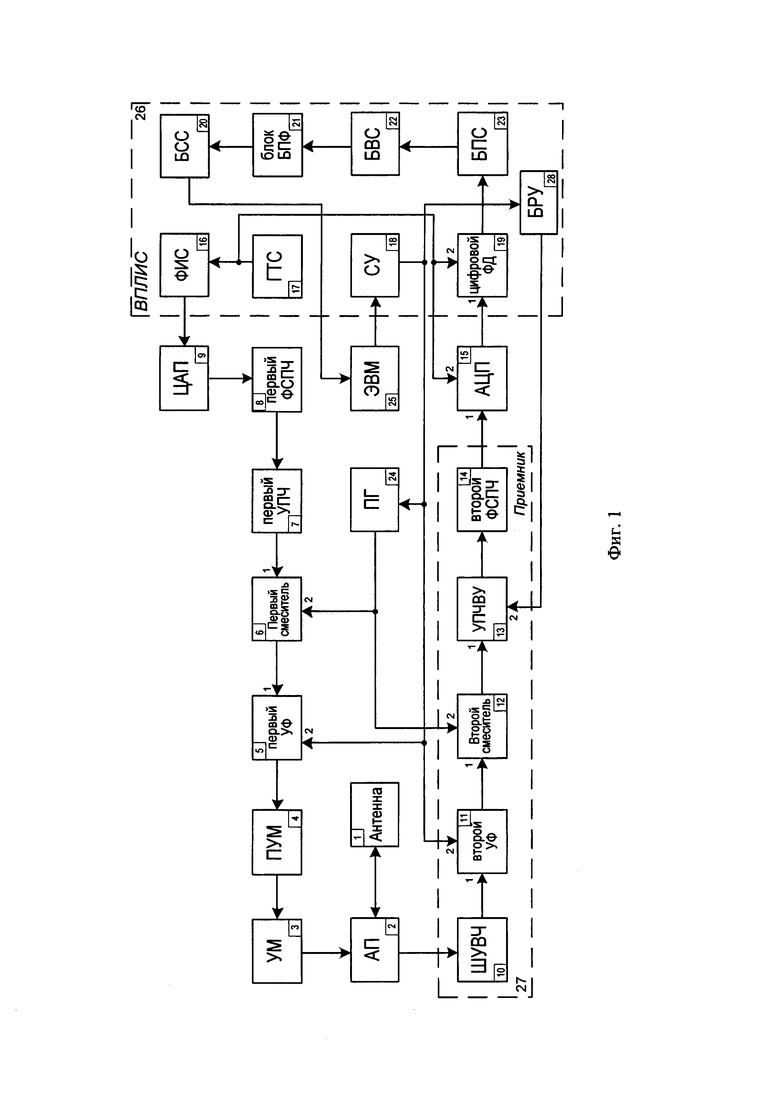
Функциональная схема предлагаемого радиолокационного устройства обнаружения БпЛА показана на фиг. 1. Предлагаемое устройство обнаружения БпЛА включает антенну 1, АП 2, УМ 3, предварительный усилитель мощности (ПУМ) 4, первый и второй смесители 6 и 12, первый и второй управляемые фильтры (УФ) 5 и 11, первый УПЧ 7, УПЧВУ 13, первый и второй ФСПЧ 8 и 14, цифро-аналоговый преобразователь 9, широкополосный усилитель высокой частоты (ШУВЧ) 10, аналого-цифровой преобразователь 15, вычислитель на программируемых логических интегральных схемах (ВПЛИС) 26, ЭВМ 25, перестраиваемый гетеродин (ПГ) 24. В состав ВПЛИС 26 входят: формирователь импульсных сигналов (ФИС) 16, генератор тактовых сигналов (ГТС) 17, схема управления (СУ) 18, цифровой ФД 19, блок сложения спектров (БСС) 20, блок быстрого преобразования Фурье (БПФ) 21, блок первичного суммирования (БПС) 23, блок вторичного суммирования (БВС) 22 и БРУ 28. При этом последовательно соединенные блоки с 10-го по 14-й объединены в приемнике 27. Межблочные связи предлагаемого радиолокационного устройства обнаружения БпЛА показаны на фиг. 1.
Радиолокационное устройство обнаружения БпЛА работает следующим образом. Генератор таковых сигналов 17, собранный на программируемых логических интегральных схемах (ПЛИС), вырабатывает тактовые сигналы в цифровом виде и направляет их на вход ФИС 16. Конструктивно и программно ФИС 16 выполнен на ПЛИС. Частота повторения тактовых сигналов составляет величину порядка единиц ГГц. Тактовые сигналы выполняют роль синхронизирующих импульсов, по которым ведется отсчет времени, отсчеты периодов повторения импульсов, назначается начало и конец импульсов и т.д. По тактовым сигналам синхронизации, ФИС 16 формирует цифровые коды огибающих прямоугольных импульсов без радиочастотного заполнения длительностью τи порядка долей или единиц микросекунд (например, τи=1,2 мкс) с периодом повторения Ти порядка десятков микросекунд (например, τи=20 мкс). Период повторения τи и длительность τи с течением времени не меняются. Период повторения Ти определяет однозначно измеряемую максимальную дальность действия устройства обнаружения БпЛА.
Цифровые коды огибающих импульсов поступают из ФИС 16 (второй выход всего ВПЛИС) в ЦАП 9, в котором из цифровых кодов прямоугольных сигналов формируются аналоговые радиоимпульсы на промежуточной частоте ƒпч. Для заполнения импульсов колебаниями высокой частоты в составе ЦАП 9 имеется собственный встроенный генератор. Величина промежуточной частоты ƒпч может равняться десяткам или сотням МГц (например, ƒпч=150 МГц). Для устранения проникновения в передающий тракт сигналов других частот на выходе ЦАП 9 предусмотрен первый ФСПЧ 8. Полоса пропускания первого ФСПЧ 8 равна 1 МГц, средняя частота полосы пропускания точно настроена на ƒпч. Сигналы на промежуточной частоте ƒпч проходят усиление в первом УПЧ 7 (первая фаза усиления) и поступают с его выхода на первый смеситель 6, на второй вход которого поступают также сигналы несущей частоты, вырабатываемые перестраиваемым гетеродином 24. При формировании сигналов на первой частоте зондирования ƒн1 на входе перестраиваемого гетеродина 24 сигналы управления равны нулю (сигналы отсутствуют) и частота вырабатываемых ПГ сигналов равна 1,5 ГГц. Сигналы управления с первого выхода схемы управления 18 определяют частоту выходных сигналов перестраиваемого гетеродина 24, которая может изменяться с дискретностью 10 мегагерц. Если обозначить переменной i номер частоты, то сигналы i-й по счету несущей частоты ƒнi должны иметь частоту ƒнi=(1500+10i) МГц.
В первом смесителе 6 сигналы на частотах ƒпч и ƒнi смешиваются, и в результате формируются радиоимпульсы на частоте (ƒнi+ƒпч), которые поступают из смесителя 6 в первый управляемый фильтр 5. Управляемый фильтр перестраивает полосу пропускания так, чтобы средняя частота полосы пропускания совпадала с частотой (ƒнi+ƒпч). Ширина полосы пропускания перестраиваемого управляемого фильтра 5 равна 1 МГц. Перестройка полосы пропускания происходит под действием сигналов управления с выхода схемы управления 18, поступающих на второй вход управляемого фильтра 5.
Сигналы с выхода первого управляемого фильтра 5 поступают на вход ПУМ 4, где усиливаются по мощности (вторая фаза усиления сигналов) и поступают далее на основной УМ 3. После основного усиления (третья фаза усиления) в УМ 3 мощные сверхвысокочастотные импульсы на частоте (ƒнi+ƒпч) поступают на АП 2 и перенаправляются им в антенну для излучения в пространство. Отраженные от местных предметов, ВО и БпЛА сигналы улавливаются антенной 1 и через АП 2 поступают на ШУВЧ 10, в котором происходит их предварительное усиление. Широкая полоса частот усилителя 10 обусловлена тем, что зондирующие сигналы разных частот должны проходить усиление с одинаковым коэффициентом. Далее сигналы с выхода ШУВЧ 10 поступают на первый вход второго управляемого фильтра 11, на второй вход которого поступают сигналы управления с выхода СУ 18. Второй управляемый фильтр 11 имеет постоянную полосу пропускания шириной 5 МГц и среднюю частоту полосы пропускания, равную частоте излучаемого в данном периоде повторения зондирующего сигнала (ƒнi+ƒпч). Схема управления 18 посредством сигналов управления назначает частоту перестраиваемого гетеродина 24 и управляемых фильтров 5 и 11. Таким образом, при изменении частоты ПГ 24 полосы фильтров 5 и 11 перемещаются по шкале частот так, чтобы их средние частоты ƒср в любом периоде повторения были равны сумме промежуточной частоты ƒпч и частоты сигналов гетеродина 24, т.е. ƒcpi=ƒнi+ƒпч. Полоса второго управляемого фильтра 11 выбрана с учетом необходимости пропускания сигналов с различными доплеровскими добавками (положительными и отрицательными в зависимости от направления движения ВО). Основной функцией второго управляемого фильтра 11 является режекция сигналов, излученных в смежных периодах повторения на другой частоте зондирования, т.е. исключение из обработки сигналов, отраженных крупными объектами с большой эффективной площадью рассеяния (ЭПР) [5-7] на дальности, превышающей однозначно измеряемую в периоде повторения Ти дальность.
С выхода 2-го УФ 11 отраженные сигналы поступают на первый вход второго смесителя 12, на второй вход которого подаются сигналы несущей частоты соответствующего периода повторения. Смеситель 12 обеспечивает выделение сигналов на разностной частоте (ƒнi+ƒпч+ƒд)-ƒнi=ƒпч+ƒд, где ƒд - доплеровская частота отраженных сигналов. На выходе второго смесителя 12 предполагается наличие фильтра (на фиг. 1 не показан). Этот фильтр настроен на частоту ƒпч и имеет полосу, ширина которой равна удвоенной максимально возможной частоте Доплера, движущегося ВО.
С выхода второго смесителя 12 отраженные сигналы поступают на вход УПЧ с внешним управлением 13, в котором осуществляется их основное усиление. Коэффициент усиления УПЧВУ 13 зависит от несущей частоты, величину которой устанавливает схема управления 18. Сигналы с выхода СУ 18 поступают на вход цифрового БРУ 28, который вырабатывает кодовые команды управления коэффициентом усиления УПЧВУ 13. Коды сигналов управления, вырабатываемые БРУ 28, соответствуют необходимым коэффициентам усиления, которые обратно пропорциональны уровням частотной характеристики антенны на соответствующей частоте зондирования. Эти уровни определяются экспериментально и заблаговременно по эталонным отражателям с известной ЭПР в соответствии с логикой, изложенной в [8].
Затем усиленные сигналы с выхода УПЧВУ 13 поступают для фильтрации на вход второго ФСПЧ 14. Как вариант полоса пропускания второго ФСПЧ 14 может иметь значение 5 или 10 МГц. Функционально последовательно соединенные ШУВЧ 10, второй управляемый фильтр 11, второй смеситель 12, УПЧВУ 13 и второй ФСПЧ 14 представляют собой приемник, отличающийся наличием широкополосного усилителя высокой частоты, управляемого фильтра 11 с изменяемой полосой пропускания и неизменной средней частотой этой полосы, а также с коэффициентом усиления УПЧ, регулируемым кодовыми сигналами, учитывающими неравномерность частотной характеристики антенны.
Выход второго ФСПЧ 14 связан с первым входом АЦП 15, в котором с синхронизацией, навязываемой по второму входу сигналами ГТС 17, происходит преобразование усиленных и отфильтрованных аналоговых отраженных сигналов в цифровую форму. Причем операция перевода в цифровой вид проводится до выделения огибающей отраженных сигналов, то есть на промежуточной частоте с доплеровской частотной добавкой. Частота дискретизации Fацп в АЦП 15 должна быть вдвое больше значения промежуточной частоты и максимально возможной частоты Доплера, то есть Fацп≥2(ƒпч+ƒд макс).
Преобразованные на промежуточной частоте в цифровой код отраженные сигналы с выхода АЦП 15 поступают на первый вход цифрового ФД 19, который предназначен для разложения оцифрованных сигналов на квадратурные составляющие: действительную Re и мнимую Im. Цифровой ФД 19 имеет в своем составе цифровой генератор опорного напряжения частоты/пч, сигналы которого синхронизируются таковыми сигналами ГТС 17, поступающими на второй вход цифрового ФД 19. Опорные сигналы подаются в каналы цифрового ФД 19 со сдвигом фазы на π/2, что позволяет получить на выходе детектора квадратурные составляющие отражений [5,6], необходимые для проведения дальнейшего цифрового векторного сложения отражений разных периодов повторения и осуществления спектрального анализа просуммированных отражений. Цифровой ФД входит в состав ВПЛИС 26 и конструктивно выполнен на типовых ПЛИС.
С выхода цифрового ФД 19 цифровые коды действительной (косинусной) и мнимой (синусной) составляющих поступают на БПС 23, в котором для каждого строба дальности формируется суммарный код отраженного сигнала. Для этого вся линейка дальности заблаговременно делится на соответствующее число стробов, каждый из которых перекрывается со смежным наполовину. Ширина строба дальности равна длительности зондирующего импульса τи. После перевода в цифровую форму в каждом периоде повторения Ти будет получено S комплексных отсчетов отражений, причем S=Tи/Δtацп, где Δtацп - период дискретизации АЦП 15. В пределах длительности импульса τи при этом будет укладываться Sи отсчетов, причем Sи=S/Q, где Q - скважность. Например, при наличии в периоде Ти 640 отсчетов и скважности Q=10 в каждом стробе дальности уместятся 64 комплексных отсчета отражений.
С учетом того, что на время излучения зондирующего сигнала приемник закрывается, число стробов, для которых производится нахождение суммарного отсчета, равно 2Q-2. Порядок нахождения суммарных отсчетов стробов следующий. Первым или начальным стробом признается строб, начинающийся с (Sи+1)-го отсчета, так как на время излучения зондирующего сигнала приемник закрывается и отраженные от ВО сигналы не фиксируются. В отдельный рабочий массив Y заносятся (записываются) Sи очередных отсчетов, начиная с (Sи+1)-го, и вычисляется модуль их векторной суммы [9]. Для этого вычисляется сначала сумма ReΣ всех действительных частей Re, записанных в рабочий массив Y комплексных отсчетов по формуле  , где Rek - величина действительной (косинусной) составляющей k-го отсчета, записанного в рабочий массив Y, а затем аналогичным образом вычисляется сумма мнимых частей по формуле
, где Rek - величина действительной (косинусной) составляющей k-го отсчета, записанного в рабочий массив Y, а затем аналогичным образом вычисляется сумма мнимых частей по формуле  , после чего вычисляется модуль и фаза итогового суммарного комплексного отсчета, которые направляются с выхода БПС 23 на вход БВС 22, также выполненного на ПЛИС. Далее в БПС 23 осуществляется смещение выбираемых для суммирования отсчетов отраженных сигналов на Sи/2 отсчетов, и операция вычисления суммы очередных SH отсчетов, начиная с (Sи+1+Sи/2)-го отсчета, повторяется. Так, передвигаясь с дискретностью в Sи/2 отсчетов (т.е. смещаясь на очередном шаге на половину ширины строба), вычисляется 2Q-2 комплексных сумм отраженных сигналов, которые направляются на вход БВС 22. Например, при скважности Q=10 и наличии в периоде повторения 640 отсчетов на выходе БПС 23 будет сформировано 18 суммарных комплексных отсчетов.
, после чего вычисляется модуль и фаза итогового суммарного комплексного отсчета, которые направляются с выхода БПС 23 на вход БВС 22, также выполненного на ПЛИС. Далее в БПС 23 осуществляется смещение выбираемых для суммирования отсчетов отраженных сигналов на Sи/2 отсчетов, и операция вычисления суммы очередных SH отсчетов, начиная с (Sи+1+Sи/2)-го отсчета, повторяется. Так, передвигаясь с дискретностью в Sи/2 отсчетов (т.е. смещаясь на очередном шаге на половину ширины строба), вычисляется 2Q-2 комплексных сумм отраженных сигналов, которые направляются на вход БВС 22. Например, при скважности Q=10 и наличии в периоде повторения 640 отсчетов на выходе БПС 23 будет сформировано 18 суммарных комплексных отсчетов.
Число пачек W сигналов одной частоты выбирается, например, равным восьми (W=8). Число периодов Ти в пачке сигналов одной несущей частоты выбирается, к примеру, равным М=2560. Значит, для каждой пачки отраженных сигналов для выбранных параметров на выходе БПС 23 будет получено (2Q-2)×2560 суммарных отсчетов или 2560 массивов Е, содержащих по (2Q-2) элементов, каждый из которых является векторной суммой Sи отсчетов.
В блоке 22 производится вторичное суммирование отражений для каждой серии из 10 периодов зондирования. Для этого в пределах каждой пачки из 2560 периодов зондирования Ти выделяются 256 фракций, включающих отсчеты очередных 10 периодов повторения. Согласно принципу суммирования по времени или по отсчетам фракции не пересекаются. В пределах каждой фракции вычисляются суммы десяти комплексных отсчетов одноименных стробов дальности. Иначе говоря, в пределах фракции выбираются 10 отсчетов, принадлежащих первому стробу дальности и вычисляется их комплексная сумма, затем вычисляется аналогичная сумма для отсчетов второго строба дальности и так далее до (2Q-2)-го строба. Значит, в пределах каждой из 256 фракций получают (2Q-2) комплексных отсчетов, каждый из которых представляет собой векторную сумму отражений в 10-ти смежных периодах повторения. Таким образом, на выходе БВС 22 формируют 256 массивов Z, в каждом из которых содержится по 2Q-2 комплексных суммарных отраженных сигналов. Каждый массив Z может быть записан в виде

где  - суммарный комплексный отсчет k-го строба дальности, полученный сложением отраженных сигналов этого строба в 10 смежных периодах зондирования.
- суммарный комплексный отсчет k-го строба дальности, полученный сложением отраженных сигналов этого строба в 10 смежных периодах зондирования.
С выхода БВС 22 эти массивы Z поступают в блок БПФ 21, в котором формируются спектры отражения сигналов одноименных стробов дальности. Для этого из 256 массивов Z, полученных для очередной пачки отраженных сигналов, формируются k-е массивы-столбцы Z1k, в каждый из которых записываются комплексные суммарные отражения, полученные в 256 фракциях одночастотной пачки для соответствующего k-го строба дальности:
где k - номер строба дальности; верхний индекс при  обозначает номер фракции, в которой предварительно произведено вторичное суммирование.
обозначает номер фракции, в которой предварительно произведено вторичное суммирование.
С каждым массивом Z1k проводится операция комплексного БПФ с предварительным добавлением 256-ти нулей в начале массива. Результатом БПФ является соответствующий спектральный массив или цифровой спектр отражений в соответствующем стробе дальности, т.е. результирующий массив Z2 из 512-ти элементов. Понятно, что для каждой пачки одночастотных отражений будет получено 2Q-2 массивов Z2. Эти массивы в цифровом виде поступают из блока 21 в БСС 20, в котором обобщаются результаты спектрального анализа отражений, полученных в восьми пачках, излучаемых на одной частоте.
Для каждой из 8 пачек процедура формирования спектров каждого k-го строба дальности едина. После формирования массивов Z2 комплексных векторов спектров фазовая информация в БСС 20 обнуляется и обработка осуществляется только с модульными (амплитудными) значениями спектральных массивов. В БСС 20 для удобства последующего приятия решений об обнаружении БпЛА или иного ВО формируется итоговый двумерный массив, в 2Q-2 столбцах которого фиксируются спектры отражений, обобщенные по восьми излученным одночастотным пачкам. Итоговый обобщенный двумерный спектральный массив формируется путем сложения амплитуд спектров восьми одноименных стробов дальности и объединения просуммированных спектральных массивов-столбцов в двумерный массив. Например, для получения обобщенного спектрального массива  7-го строба дальности (из 2Q-2 стробов) вычисляется массив
7-го строба дальности (из 2Q-2 стробов) вычисляется массив
а для k-го строба дальности - соответственно массив вида
где  - модульное (амплитудное) значение х-го по счету элемента s-го спектрального массива Z2s k-го строба дальности, полученного из отраженных сигналов соответствующей s-й пачки одночастотных излучений.
- модульное (амплитудное) значение х-го по счету элемента s-го спектрального массива Z2s k-го строба дальности, полученного из отраженных сигналов соответствующей s-й пачки одночастотных излучений.
Объединяя k-е массивы-столбцы в двумерном массиве ZΣ, в котором номера столбцов соответствуют номерам стробов дальности, в БСС 20, выполненном на ПЛИС, формируют итоговый двумерный массив ZΣ вида
Этот массив в цифровом виде с выхода блока 20 передается на вход ЭВМ 25, в которой в последующем осуществляется анализ результирующих спектрально-дальностных массивов ZΣ в интересах обнаружения ВО и БпЛА. Управляющая и индицирующая ЭВМ 25 представляет собой специализированный ноутбук, сопряженный по линиям связи с блоками 18 и 20. По истечении обработки восьми пачек сигналов одной частоты по сигналу из блока 18 частота излучения изменяется и процесс формирования матрицы ZΣ, соответствующей очередной частоте, повторяется. Так последовательно в ЭВМ 25 поступают двумерные спектрально-дальностные массивы отражений, полученные для всех частот зондирования.
При превышении каким-либо элементом массива  (где верхний индекс указывает на соответствие пачкам сигналов i-й частоты), полученном при обработке сигналов i-й частоты, установленного порога обнаружения, принимается предварительное решение об обнаружении какого-либо ВО. Если превышение порога для одного и того же элемента массивов ZΣ происходит на большом числе частот, т.е. в нескольких массивах
(где верхний индекс указывает на соответствие пачкам сигналов i-й частоты), полученном при обработке сигналов i-й частоты, установленного порога обнаружения, принимается предварительное решение об обнаружении какого-либо ВО. Если превышение порога для одного и того же элемента массивов ZΣ происходит на большом числе частот, т.е. в нескольких массивах  , то принимается решение об обнаружении типового ВО с ЭПР не менее единиц квадратных метров. Если же превышение порогового уровня происходит только в одном из поочередно формируемых массивов
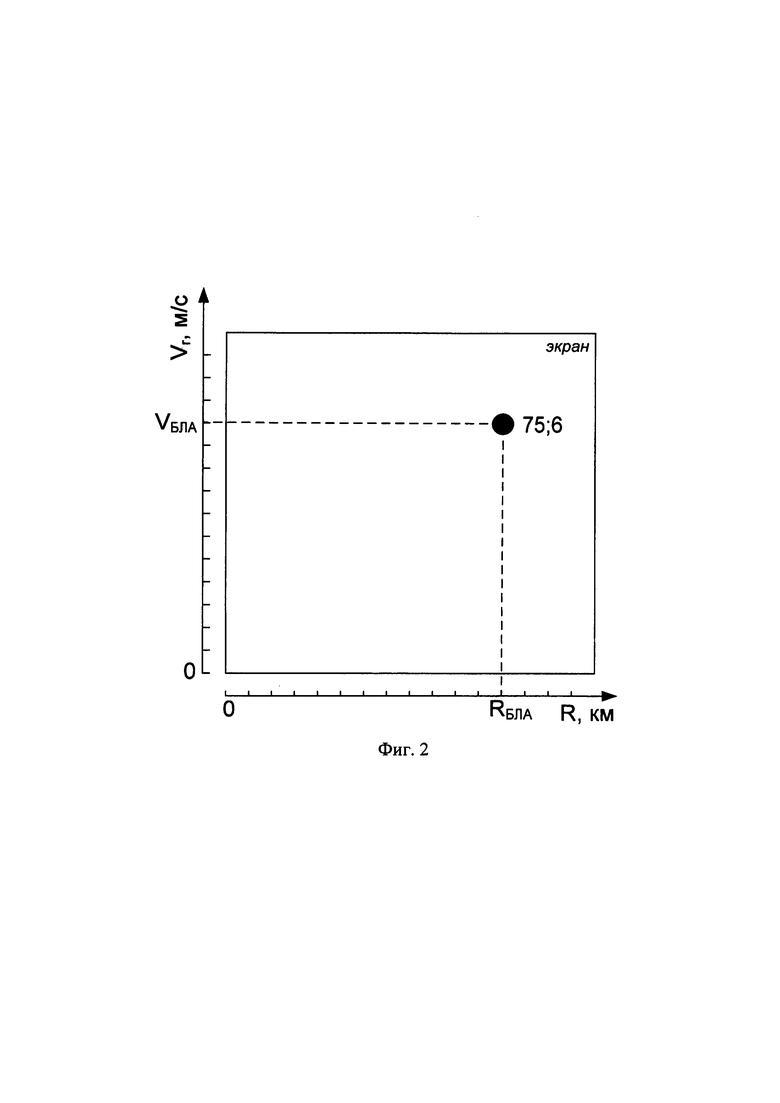
, то принимается решение об обнаружении типового ВО с ЭПР не менее единиц квадратных метров. Если же превышение порогового уровня происходит только в одном из поочередно формируемых массивов  , то для уточнения наличия в зоне поиска БпЛА с малой ЭПР, по команде оператора (нажатие на соответствующую кнопку или иконку) ЭВМ 25 передает на схему управления 18 цифровую команду для перехода на излучение сигналов только той резонансной частоты, на которой произошло превышение порога обнаружения. Несколько раз (например, 3 раза) подряд из отраженных сигналов резонансной частоты формируются двумерные спектрально-дальностные массивы ZΣ и результаты их анализа сравниваются. При совпадении номеров элементов, превысивших пороговый уровень, принимается решение об обнаружении БпЛА, что маркируется на экране ЭВМ 25 соответствующим символом. Вариант оформления экрана ЭВМ, с помощью которого информация об обнаруженных БпЛА и ВО доводится до персонала, представлен на фиг. 2. Рядом с отметкой об обнаруженном БпЛА выводится информация о его радиальной скорости по номеру строки элемента с отметкой о наличии обнаруженного БпЛА и о его дальности по номеру столбца этого элемента, соответствующего номеру строба дальности. Например, на фиг. 2 рядом с отметкой об обнаруженном БпЛА (когда его спектрально-временной отклик превысил порог, его срез превышения порога маркируется особым цветом) выведена информация о том, что радиальная скорость БпЛА Vr равна 75 м/с, а дальность R соответственно равна 6 км.
, то для уточнения наличия в зоне поиска БпЛА с малой ЭПР, по команде оператора (нажатие на соответствующую кнопку или иконку) ЭВМ 25 передает на схему управления 18 цифровую команду для перехода на излучение сигналов только той резонансной частоты, на которой произошло превышение порога обнаружения. Несколько раз (например, 3 раза) подряд из отраженных сигналов резонансной частоты формируются двумерные спектрально-дальностные массивы ZΣ и результаты их анализа сравниваются. При совпадении номеров элементов, превысивших пороговый уровень, принимается решение об обнаружении БпЛА, что маркируется на экране ЭВМ 25 соответствующим символом. Вариант оформления экрана ЭВМ, с помощью которого информация об обнаруженных БпЛА и ВО доводится до персонала, представлен на фиг. 2. Рядом с отметкой об обнаруженном БпЛА выводится информация о его радиальной скорости по номеру строки элемента с отметкой о наличии обнаруженного БпЛА и о его дальности по номеру столбца этого элемента, соответствующего номеру строба дальности. Например, на фиг. 2 рядом с отметкой об обнаруженном БпЛА (когда его спектрально-временной отклик превысил порог, его срез превышения порога маркируется особым цветом) выведена информация о том, что радиальная скорость БпЛА Vr равна 75 м/с, а дальность R соответственно равна 6 км.
Если обнаружение ни на одной из (предположительно резонансных) частот не произошло, то процесс поиска БпЛА в режиме изменения частоты с периодичностью в 8 пачек сигналов повторяется.
Блоки с 16-го по 23-й, а также блок 28 конструктивно входят в вычислитель на ПЛИС [10], первым входом которого является вход цифрового ФД 19, вторым входом - вход схемы управления 18, первым выходом - выход БСС 20, вторым выходом - выход ФИС 16, третьим выходом - выход БРУ 28.
В высокочастотном приближении рассеянное электромагнитное поле состоит из следующих компонентов [2, с. 21-30]: зеркальные отражения; поле на участках разрыва гладкой поверхности ВО (ребро, кромка крыла) и на участках разрыва производной функции, которая описывает поверхность рассеяния; рассеяние на границе «свет-тень», т.е. ползущие волны; бегущие волны, возникающие при наклонном падении электромагнитной волны (ЭМВ) на слабовыпуклые поверхности; отражения от вогнутых участков поверхности ВО.
Основными составляющими рассеянного поля в резонансной области являются зеркальные отражения, краевые волны и поверхностные волны. Существенную роль при этом играют ползущие волны, вклад которых особенно возрастает на стыке рэлеевской и резонансной областей. При облучении сосредоточенных ВО с направлений, где зеркальное и краевое рассеяния слабы, в совокупное обратное рассеяние определяющий вклад вносят ползущие волны. Суммарное поле рассеяния при этом формируется в основном из дифрагированной ползущей ЭМВ и поля зеркально рассеянной ЭМВ. Диаграмма рассеяния слабо зависит от ракурса ВО по сравнению с квазиоптической областью, но также является многолепестковой. Интенсивность отражения от каждого токопроводящего объекта зависит от его формы, размеров и длины волны зондирующего сигнала. На низких частотах, когда произведение волнового числа k=2π/λ на поперечный размер объекта L много меньше единицы, большинство объектов электромагнитные волны не отражает, а лишь преломляет их. При повышении частоты и переходе в резонансную область (kL≈1) ЭПР облучаемого объекта резко увеличивается [11, с. 81-83]. При L≈λ/2 наблюдается максимизация величины ЭПР. Экспериментальные зависимости изменения ЭПР объекта (шара, конуса, стержня) от изменения kL, приведенные в [11, рис. 3.22-3.24], подтверждают вышесказанное.
Хорошо известно, что современные БпЛА могут быть как с металлическим каркасом, так и полностью из композитных и пластичных материалов [12,13]. Поэтому их эквивалентный поперечный размер, определяемый металлизированными элементами (плата управления, двигатель, крепление оптической линзы, антенна) может отличаться в десятки и более раз. Особенно трудно обнаруживать БпЛА, если в его конструкции и оборудовании мало металлических частей и их размеры незначительны. В этом случае отраженные ЭМВ могут быть зафиксированы приемником РЛС только при определенных ракурсах и в условиях возникновения резонансного отражения. А поскольку истинный поперечный размер отражающего элемента БпЛА неизвестен, то необходимо осуществлять поиск резонанса путем плавного или ступенчатого изменения частоты зондирования с шагом не более десятков МГц, что и предполагается осуществлять предложенным устройством.
Новизна предлагаемого технического решения заключается в следующем. При обнаружении БпЛА и типовых ВО перестройка несущей частоты осуществляется рассматриваемым устройством в широких пределах. Частотные характеристики большинства современных антенн при функционировании в широком диапазоне частот не являются стабильными, имея множество провалов и всплесков. Это может привести, во-первых, к пропуску малозаметного БпЛА при использовании отражений в области провала частотной характеристики, а во-вторых, - к неверному восприятию интенсивности отражений от ВО. Изготовление и использование широкополосных антенн приводит к существенному удорожанию радиолокационных устройств. При этом известен экономный способ устранения негативного влияния неравномерности частотной характеристики антенной системы [4], в котором предложено изменять коэффициент емых сигналов разных несущих частот. В ходе предварительных натурных экспериментов исследуется характер частотной характеристики и рассчитываются коэффициенты ее неравномерности. На основе этих коэффициентов формируются обратно пропорциональные поправочные коэффициенты усиления в тракте обработки сигналов, которые и предлагается использовать в качестве коэффициентов усиления УПЧ приемной системы. Хранение и формирование коэффициентов усиления УПЧ предлагается выполнить в цифровом виде (в аналоговом виде это также выполнимо).
Пример УПЧ с внешним цифровым управлением представлен, например, в [14, с. 149 рис. 6.2] или в [15]. Применимость и существование (осуществимость) остальных элементов предлагаемого устройства обоснована в прототипе. Таким образом, все элементы предлагаемого устройства являются известными, что говорит о его технической реализуемости. Из описания работы устройства следует, что оно действительно может качественно выполнять функцию обнаружения БпЛА и типовых ВО, причем цифровое управление позволяет выбирать нужную резонансную частоту зондирования и повышать достоверность решения путем сравнения результатов последовательных этапов обнаружения и учета неравномерности частотной характеристики антенны.
Предлагаемое устройство рекомендуется для применения в комплексах радиолокационного контроля воздушного пространства и радиолокационных станциях обнаружения специального или двойного назначения. Предложенное устройство может также использоваться в качестве отдельного радиолокационного модуля в составе цилиндрической фазированной антенной решетки для обзора пространства электронным образом, т.е. без вращения антенного кронштейна.
Источники информации
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. С. 78-81, рис. 3.21 (аналог).
2. Радиолокационные характеристики летательных аппаратов / Под ред. Л.Т. Тучкова. М.: Радио и связь, 1985. 236 с.
3. Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. М., Воениздат, 1967. 768 с.
4. Патент на полезную модель №136192 от 27.12.2013. МПК G01S 13/00. Радиолокационное устройство обнаружения беспилотных летательных аппаратов. Зайцев А.В., Амозов Е.В., Митрофанов Д.Г. и др. Заявка №2013140849/07. Бюл. 36 (прототип).
5. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. М.: Сов. радио, 1967. Том 1. Основы радиолокации. 456 с.
6. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970. - 560 с.
7. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Часть 1. Основы радиолокации. М.: Воениздат, 1983. - 456 с.
8. Патент РФ №2784887 от 04.10.2022. МПК G01S 7/40. 54) Способ устранения негативного влияния неравномерности частотной характеристики антенной системы. Вицукаев А.В., Митрофанов Д.Г. и др. Заявка №2022125954. Опубл. 4.10.2022. Бюл. 34.
9. Выгодский М. Я. Справочник по высшей математике. М.: ACT: Астрель, 2005. 991 с.
10. Суворова Е.А., Шейнин Ю.Е. Проектирование цифровых систем на VHDL. СПб.: БХВ-Петербург, 2003. 576 с.
11. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. 152 с.
12. Мосов С.П. Беспилотная разведывательная авиация стран мира: история создания, опыт боевого применения, современное состояние, перспективы развития. Монография. Киев: Изд. дом «Румб», 2008. 160 с.
13. Василии Н. Я. Беспилотные летательные аппараты. Минск: ООО «Попурри», 2003. 272 с.
14. Побережский Е.С. Цифровые радиоприемные устройства. М., Радио и связь. 1987. 184 с.
15. https://bypatents.com/6-u9655-radiolokacionnyjj-priemnik.html?ysclid lrvx44raiz545401248. База патентов Республики Беларусь. Полезная модель к патенту РБ №9655 от 30.10.2013. Радиолокационный приемник. Заявка №20130241. МПК G01S 7/285.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2255353C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ ПО ИНТЕНСИВНОСТИ АМПЛИТУДНЫХ ФЛЮКТУАЦИЙ | 2010 |
|
RU2425395C2 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 2009 |
|
RU2407033C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
Изобретение относится к системам радиолокационного обнаружения воздушных объектов, в частности к устройствам обнаружения и измерения параметров движения беспилотных летательных аппаратов с малой радиолокационной заметностью. Техническим результатом изобретения является повышение качества обнаружения слабозаметных беспилотных летательных аппаратов с сохранением возможности обнаружения типовых воздушных объектов. Радиолокационное устройство обнаружения беспилотных летательных аппаратов дополнительно содержит усилитель промежуточной частоты с внешним управлением (УПЧВУ) и цифровой блок регулировки усиления (БРУ), конструктивно входящий в состав вычислителя на ПЛИС. Выход схемы управления подключен ко входу БРУ, выход которого соединен со вторым входом УПЧВУ, первый вход которого соединен с выходом второго смесителя, а выход УПЧВУ подключен ко входу второго фильтра сигналов промежуточной частоты. 2 ил.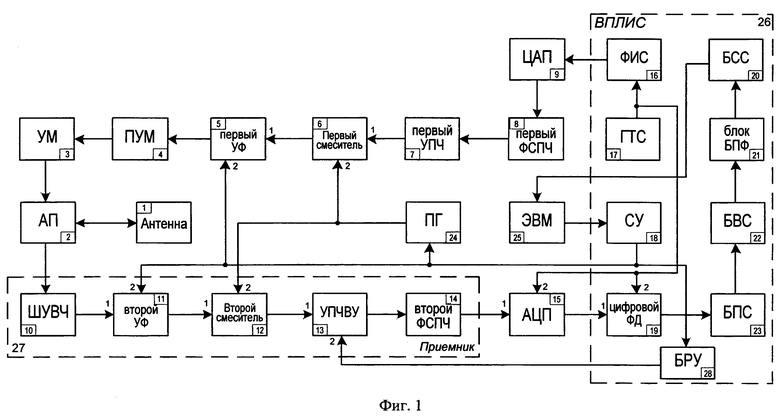
Радиолокационное устройство обнаружения беспилотных летательных аппаратов, включающее в свой состав антенну, перестраиваемый гетеродин, электронно-вычислительную машину, вычислитель на программируемых логических интегральных схемах, последовательно соединенные цифроаналоговый преобразователь, первый фильтр сигналов промежуточной частоты, первый усилитель промежуточной частоты, первый смеситель, первый управляемый фильтр, предварительный усилитель мощности, усилитель мощности, антенный переключатель, широкополосный усилитель высокой частоты, второй управляемый фильтр, второй смеситель, последовательно соединенные второй фильтр сигналов промежуточной частоты и аналого-цифровой преобразователь, причем вход-выход антенного переключателя соединен с входом-выходом антенны, выход перестраиваемого гетеродина подключен ко второму входу первого смесителя и второму входу второго смесителя, включающего в состав вычислителя на программируемых логических интегральных схемах схему управления, генератор тактовых сигналов, формирователь импульсных сигналов, последовательно соединенные цифровой фазовый детектор, блок первичного суммирования, блок вторичного суммирования, блок быстрого преобразования Фурье, блок сложения спектров, причем выход генератора тактовых сигналов связан со входом формирователя импульсных сигналов и вторыми входами аналого-цифрового преобразователя и цифрового фазового детектора, выход блока сложения спектров соединен со входом электронно-вычислительной машины, выход которой связан со входом схемы управления, выход которой подключен ко входу перестраиваемого гетеродина и вторым входам первого и второго управляемых фильтров, отличающееся тем, что в него дополнительно включают усилитель промежуточной частоты с внешним управлением, а вычислитель на программируемых логических интегральных схемах дополняют блоком регулировки усиления, причем вход блока регулировки усиления соединяют с выходом схемы управления, а выход - со вторым входом усилителя промежуточной частоты с внешним управлением, первый вход которого связывают с выходом второго смесителя, а выход - со входом второго фильтра сигналов промежуточной частоты.
| Погрузчик грузовых автомобилей | 1960 |
|
SU136192A1 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| ПРИЁМОПЕРЕДАТЧИК РАДАРА НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С РАСШИРЕННЫМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ | 2018 |
|
RU2687286C1 |
| CN 116106837 A, 12.05.2023 | |||
| CN 110954873 A, 03.04.2020 | |||
| EP 3983822 A1, 20.04.2022. | |||

