Изобретение относится к горному делу, в частности к нефтегазодобывающему оборудованию, и может быть использовано при новом проектировании для подачи шаговым приводом в шаговом режиме колонны обсадных труб в скважину и расхаживания обсадных труб в процессе ремонта и ликвидации аварии.
Известен шаговый привод для колонны обсадных труб, содержащий гидравлически соединенные через гидрораспределители с агрегатом объемного привода силовые цилиндры, установленные по направлению оси обсадной трубы и соединенные штоками с подвижными плитами неподвижные плиты, зубчатые башмаки и блок управления [1].
Недостатком известного шагового привода является ограниченная функциональная возможность.
Техническая задача состоит в том, чтобы обеспечить непрерывный процесс подачи шаговым приводом колонны обсадных труб в скважину и возможность расхаживания при капитальном ремонте для ликвидации аварии.
Решение технической задачи достигается тем, что силовые цилиндры установлены, по меньшей мере, на двух уровнях между неподвижными плитами и жестко закреплены на них, зубчатые башмаки установлены в направляющих, на подвижных плитах радиально относительно обсадной трубы установлены и жестко закреплены дополнительные силовые цилиндры, взаимодействующие через зубчатые башмаки с цилиндрической поверхностью обсадной трубы, а блок управления имеет датчики положения, датчики обратной связи, контроля и сигнализации.
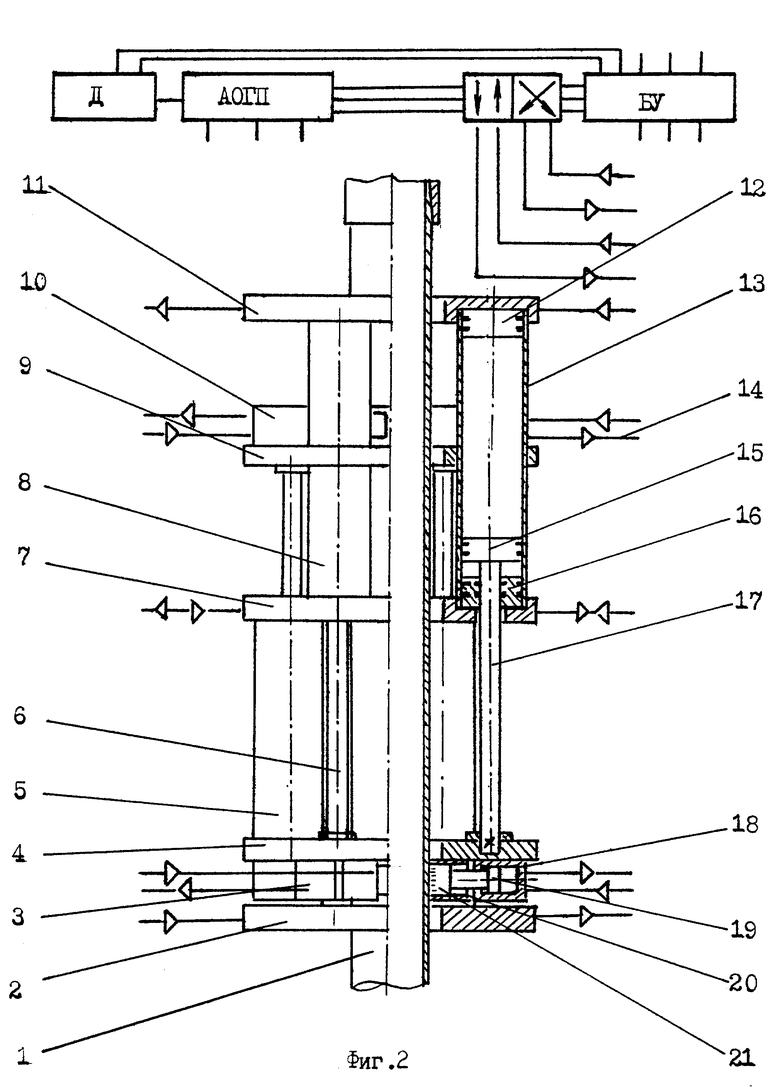
На фиг. 1 , 2 изображен шаговый привод для колонны обсадных труб. Шаговый привод имеет: двигатель - Д, агрегат объемного гидропривода - АОГП, гидрораспределители, блок управления - БУ, /изображены условно/, датчики положения, датчики обратной связи, датчики контроля и сигнализации /условно не показаны/.
Дополнительно шаговый привод содержит колонну обсадных труб 1, нижнюю неподвижную плиту 2, дополнительный силовой цилиндр 3, подвижную плиту 4, силовой цилиндр нижнего уровня 5, шток силового цилиндра верхнего уровня 6, неподвижную среднюю плиту 7, силовой цилиндр верхнего уровня 8, подвижную плиту 9, дополнительный силовой цилиндр 10, верхнюю неподвижную плиту 11, торцевую крышку цилиндра 12, направляющий корпус цилиндра 13, трубопровод высокого давления 14, поршень 15, направляющую втулку цилиндра 16, шток 17 силового цилиндра, корпус дополнительного силового цилиндра 18, поршень со штоком 19, направляющие 20, зубчатый башмак 21.
Шаговый привод колонны обсадных труб автоматизированный агрегат с контролем положения подвижных плит.
В статическом положении элементы шагового привода взаимодействуют следующим образом.
Три силовых цилиндра нижнего уровня установлены относительно оси обсадной трубы на одинаковых расстояниях в плоскостях, расположенных под углом 120o. Плоскости силовых цилиндров верхнего уровня смещены на 60o. Штоки силовых цилиндров проходят между корпусами цилиндров через отверстия в средней неподвижной плите до подвижных плит, каждая из которых на противоположной стороне имеет дополнительные силовые цилиндры, взаимодействующие с зажимными башмаками и обсадной трубой. Направляющие зажимных башмаков относительно обсадной трубы расположены в радиальном направлении. Зажимные башмаки сменные и подбираются в зависимости от размера диаметра обсадной трубы. Корпуса силовых цилиндров и неподвижные плиты представляют собой общий корпус всего шагового привода, причем корпуса цилиндров одновременно выполняют функцию направляющих стоек для подвижных плит.
В случае компоновки на каждом уровне по четыре силовых цилиндра плоскости верхних сдвинуты относительно нижних на угол в 45o, при этом число дополнительных силовых цилиндров на подвижных плитах также равно четырем.
Шаговый привод для колонны обсадных труб представляет собой роботизированный технологический комплекс, все операции которого выполняются по заранее заданной, определенной программе с адаптированием к изменяющимся условиям.
При подаче от блока управления сигнала и рабочей среды в дополнительные силовые цилиндры 3, 10, 18 их штоки взаимодействуют с зажимными башмаками 21, которые, в свою очередь, взаимодействуют с обсадной трубой 1. При подаче управляющего сигнала и рабочей среды в силовые цилиндры 5, 8, 13 их штоки взаимодействуют с подвижными плитами 4, 9.
По определенной программе срабатывают те или иные силовые цилиндры, а подвижные плиты совершают возвратно-поступательное перемещение. Если необходимо с достаточно большим усилием подать обсадную колонну в скважину, должна быть выполнена операция захвата трубы всеми зажимными башмаками и одновременное перемещение подвижных плит вниз. В следующий момент зажимные башмаки на одной подвижной плите разжимают подвижную плиту, возвращают в исходное положение и вновь захватывают трубу, после чего разжимают зажимные башмаки на другой подвижной плите и возвращают ее в свое исходное положение для последующего рабочего хода вниз одновременно двумя плитами.
Шаговый цикл технологического комплекса повторяется в определенном скоростном темпе. Подвижные плиты нижнего и верхнего уровней могут срабатывать последовательно-попеременно. Для извлечения колонны обсадных труб из скважины изменяют направление рабочих ходов шагового привода. Одновременно с натяжением колонны обсадных труб крюковой подвеской шаговый привод выполняет функцию одно- или двухуровнего домкрата.
Многовариантное исполнение роботизированного технологического комплекса позволяет широко использовать его на промыслах, например, для спуска и подъема ловильного инструмента, насосно-компрессорных труб, штанг, кабеля, гибкого трубопровода при подземном и капитальном ремонте скважин, для стыковки труб перед сваркой магистрального продуктопровода, протяжки и проводки плетей труб через препятствия в аварийных ситуациях. Шаговый привод может быть использован при строительстве и монтаже металлоконструкций. Для указанных целей неподвижные и подвижные плиты необходимо выполнить разъемными по вертикальной плоскости, элементы плит обеспечить шарнирными и замковыми соединениями.
Для ряда функциональных операций шаговый привод может быть навешан на шасси трактора или автомобиля с целью мобильного транспортирования и срочного выполнения специальных заданий на месте в различных производствах.
Предложенное техническое решение может быть использовано при новом проектировании специального оборудования. Принимаем прототип за базовый объект. Предложенное устройство в сравнении с базовым объектом имеет существенные отличия, заключающиеся в его расширенных функциональных возможностях.
Предложенное устройство может быть выполнено как стационарное автономное приспособление для подачи и извлечения предметов из опасной зоны во вредном для здоровья человека производстве.
При использовании предложенного устройства в производстве оно позволяет получить положительный технико-экономический эффект, обеспечит выполнение требований техники безопасности при особо сложных работах в аварийных ситуациях.
Специальный роботизированный технологический комплекс найдет широкое распространение и спрос на рынке Р.Ф. и за рубежом.
Источники информации:
1. Авторское свидетельство N 705100, кл. E 21 B 19/06, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ДЛЯ ДОБЫЧИ НЕФТИ | 1992 |
|
RU2106531C1 |
| Устройство для повторного входа в боковой ствол скважины | 2018 |
|
RU2677520C1 |
| Извлекаемый клин-отклонитель для повторного входа в дополнительный ствол многоствольной скважины | 2018 |
|
RU2677517C1 |
| КЛЮЧ ТРУБНЫЙ ГИДРАВЛИЧЕСКИЙ | 1999 |
|
RU2164464C2 |
| Робототехнический комплекс для текущего и капитального ремонта скважин на единой базе | 2019 |
|
RU2736591C1 |
| Робототехнический комплекс для текущего и капитального ремонта скважин | 2019 |
|
RU2736589C1 |
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| КЛИН-ОТКЛОНИТЕЛЬ ДЛЯ ПОВТОРНОГО ВХОДА В БОКОВОЙ СТВОЛ МНОГОСТВОЛЬНОЙ СКВАЖИНЫ | 2018 |
|
RU2672080C1 |
| СПОСОБ ОЧИСТКИ СТВОЛА СКВАЖИНЫ | 1999 |
|
RU2168000C2 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
Изобретение относится к горному делу, в частности к нефтегазодобывающей промышленности, и может быть использовано для равномерной шаговой подачи с достаточно большим усилием колонны обсадных труб. Силовые цилиндры шагового привода установлены по меньшей мере на двух уровнях между неподвижными плитами и жестко закреплены на них. Штоки силовых цилиндров соединены с подвижными плитами. На подвижных плитах установлены радиально относительно обсадной трубы дополнительные силовые цилиндры, которые взаимодействуют через зубчатые башмаки, установленные в направляющих, с цилиндрической поверхностью обсадной трубы. Все силовые цилиндры гидравлически соединены через гидрораспределители с агрегатом объемного гидропривода. Блок управления имеет датчики положения, датчики обратной связи, контроля и сигнализации. В процессе спуска в скважину колонны обсадных труб или подъема при капитальном ремонте шаговым приводом одна группа силовых цилиндров выполняет рабочий ход, другая в это время выполняет холостой ход. При необходимости увеличить усилие, прикладываемое к колонне обсадных труб, могут быть соединены обе группы силовых гидроцилиндров для совершения рабочего хода. Шаговый привод работает в автоматическом режиме по определенной программе блока управления. Шаговый привод может быть укомплектован пультом дистанционного управления и электронным анализатором процесса подачи. Использование предложенного шагового привода для колонны обсадных труб позволит получить положительный технико-экономический эффект при капитальном ремонте скважины и ликвидации аварий, выражающийся в расширении функциональных возможностей. 2 ил.
Шаговый привод для колонны обсадных труб, содержащий гидравлически соединенные через гидрораспределители с агрегатом объемного привода силовые гидроцилиндры, установленные по направлению оси обсадной трубы и соединенные штоками с подвижными плитами, неподвижные плиты, зубчатые башмаки и блок управления, отличающийся тем, что силовые цилиндры установлены, по меньшей мере, на двух уровнях между неподвижными плитами и жестко закреплены на них, зубчатые башмаки установлены в направляющих, на подвижных плитах радиально относительно обсадной трубы установлены и жестко закреплены дополнительные силовые цилиндры, взаимодействующие через зубчатые башмаки с цилиндрической поверхностью обсадной трубы, а блок управления имеет датчики положения, датчики обратной связи, контроля и сигнализации.
| Гидравлический трубоподъемник непрерывного действия | 1977 |
|
SU705100A1 |
| 0 |
|
SU244983A1 | |
| УСТРОЙСТВО для СПУСКА и ПОДЪЕМА КОЛОППЫ ОБСАДНЫХ ТРУБВСЕСОЮЗНАЯ | 0 |
|
SU282234A1 |
| Гульянц Г.М | |||
| и др | |||
| Гидравлические установки для принудительного спуска труб в скважины под давлением | |||
| - М.: ВНИИОЭНГ | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
