Изобретение относится к радиолокационной технике в частности, к бортовым радиолокационным станциям (БРЛС) летательных аппаратов (истребителей, вертолетов), и может использоваться для различения обнаруженных маловысотных воздушных целей, в том числе зависших вертолетов, и наземных целей в некогерентных БРЛС и некогерентных режимах когерентных БРЛС.
Известны БРЛС (G.Morris. L.Harkness, Airbom Pulsed Doppler Radar, Artech House, 1996, стр.116, 296; Справочник по радиолокации под ред. М.Сколника, т.3, гл.7, "Советское Радио", М., 1977), предназначенные, в частности, для обнаружения воздушных целей (ВЦ) на фоне подстилающей поверхности с расположенными на ней различного рода наземными (надводными) объектами или целями (НЦ). Выделение ВЦ в главном луче диаграммы направленности антенны БРЛС достигается за счет пространственной селекции и за счет отличий эхосигналов от них по задержке и доплеровской частоте относительно НЦ. Однако если эти радиолокационные станции являются некогерентными или, будучи когерентными, используют некогерентный режим обработки сигналов, то в них отсутствует возможность различать ВЦ и НЦ по величине доплеровского сдвига. Поэтому существующие способы селекции на основе различий доплеровских частот, например пространственно-скоростная селекция (Дудник П.И. Способ обнаружения и выделения низколетящих целей на фоне Земли на основе использования периодических колебаний положения фазового фронта поля, являющегося результатом интерференции рассеянного целью излучения БРЛС и отражений от подстилающей поверхности, "Военная радиоэлектроника", 1970, 1 (318), стр.3), оказываются неприменимыми.
Из известных технических решений наиболее близким является устройство, описанное в патенте США №4862177, МКИ G01S 13/52; 13/58; US 342/160 (Sung Y. Wong Processor for discriminating between ground and airborn moving targets), основанное на анализе выходного сигнала угломестного канала когерентной БРЛС моноимпульсного типа. Это устройство содержит приемное устройство суммарного канала моноимпульсной БРЛС и многоканальный (по числу стробов дальности) обнаружитель импульсного сигнала в суммарном канале, приемное устройство разностного угломестного канала, аналогичное приемному устройству суммарного канала, угловой дискриминатор для выделения сигнала рассогласования по углу места. Работа его основана на том, что в каждом элементе представляющего интерес участка развертки дальности производится определение разности значений выходного сигнала угломестного дискриминатора при подаче на его вход спектрального отсчета эхосигнала, отраженного от подстилающей поверхности, и спектрального отсчета эхосигнала от обнаруженного движущегося объекта. Если абсолютная величина разности не превосходит выбранного допуска, то выносится решение об обнаружении НЦ, в противном случае - ВЦ.
Недостатком прототипа является то, что для получения сравниваемых оценок угла места ВЦ и НЦ в нем требуется доплеровская информация, отсутствующая в некогерентных БРЛС.
Задачей изобретения является обеспечение возможности различения маловысотных воздушных и наземных целей при их обнаружении с помощью некогерентных моноимпульсных БРЛС или в некогерентных режимах когерентных БРЛС.
Поставленная задача достигается тем, что в устройство, содержащее стробируемое по дальности приемное устройство суммарного канала моноимпульсной БРЛС и N-канальный (N - число стробов дальности, перекрывающих диапазон ожидаемых задержек эхосигналов целей) некогерентный обнаружитель импульсного сигнала в суммарном канале, приемное устройство разностного угломестного канала, аналогичное приемному устройству суммарного канала и соединенное с N-канальным некогерентным обнаружителем импульсного сигнала в суммарном канале, угловой дискриминатор для выделения сигнала рассогласования по углу места, первый, второй, третий и четвертый логические элементы (ЛЭ) «И», логический элемент «ИЛИ», вычислительное устройство, дополнительно введены последовательно соединенные функциональный преобразователь угол места - высота рельефа местности, первое запоминающее устройство, блок оценки математического ожидания и дисперсии высоты рельефа местности в двумерном скользящем окне, первое пороговое устройство и пятый логический элемент «И», а также второе и третье запоминающее устройства, обнаружитель тени, второе пороговое устройство.
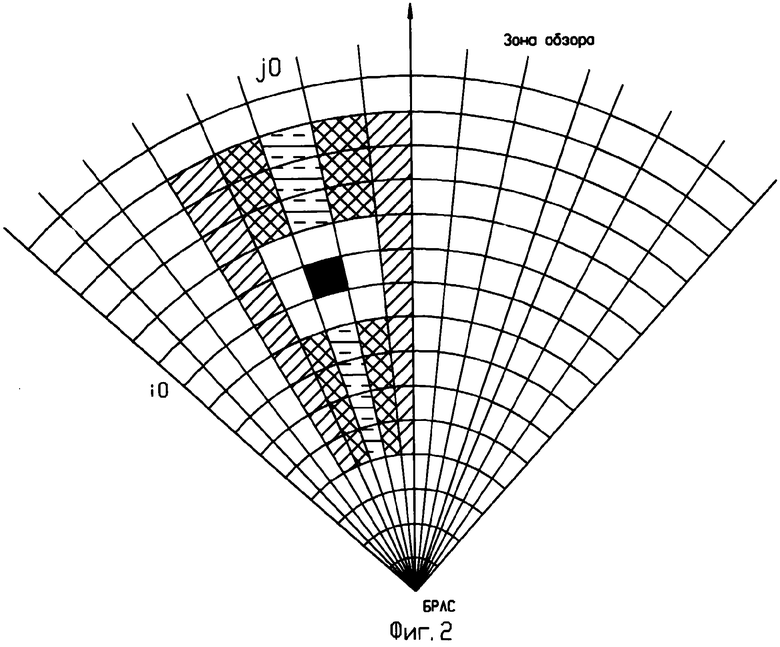
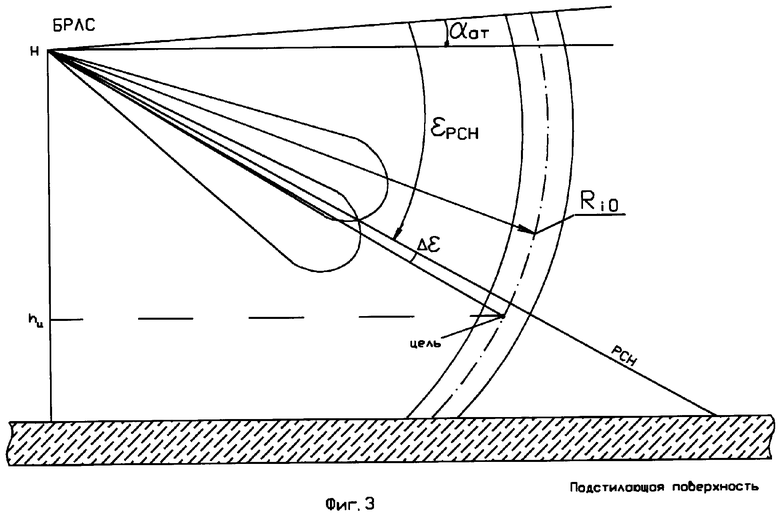
На фиг.1 изображена блок-схема устройства селекции маловысотных воздушных и наземных целей в БРЛС, на фиг.2 - двумерное скользящее окно, на фиг.3 приведен чертеж, поясняющий геометрические соотношения для решаемой задачи.
Устройство селекции маловысотных воздушных и наземных целей в БРЛС содержит (фиг.1) стробируемое по дальности приемное устройство 1 суммарного канала моноимпульсной БРЛС, N-канальный (N - число стробов дальности, перекрывающих диапазон ожидаемых задержек эхосигналов целей) некогерентный обнаружитель импульсных сигналов 2, приемное устройство 3 разностного угломестного канала, аналогичное стробируемому приемному устройству 1, вход стробирования которого соединен с первым выходом N-канального некогерентного обнаружителя 2 импульсного сигнала в суммарном канале, угловой дискриминатор 4, функциональный преобразователь угол места - высота рельефа местности 5, первое запоминающее устройство (ЗУ-1) 6 для формирования скользящего окна, блок оценки математического ожидания и дисперсии высоты рельефа местности 7 в скользящем двумерном окне, первое пороговое устройство 8 для обнаружения высотных целей, второе запоминающее устройство (ЗУ-2) 9 для формирования скользящего окна тени, обнаружитель тени по логике "k из n" 10, пятый логический элемент (ЛЭ) "И" 11, второе пороговое устройство 12 для регистрации наличия отражений от подстилающей поверхности, третье запоминающее устройство (ЗУ-3) 13, первый, второй, третий, и четвертый ЛЭ "И" 14, 15, 16 и 17 соответственно, причем у третьего ЛЭ «И» 16 второй вход, а у четвертого ЛЭ «И» 17 второй и третий входы - инвертированные, ЛЭ «ИЛИ» 18, вычислительное устройство 19, соединенное с выходом функционального преобразователя угол места - высота рельефа местности 5. От бортовых датчиков летательного аппарата на второй вход функционального преобразователя угол места - высота рельефа местности 5, а также на первый вход вычислительного устройства 19 поступают данные о высоте полета Н, угле атаки α носителя БРЛС и об угле места равносигнального направления антенной системы βРСН, на два вторых (управляющих) входа ЗУ-1 6, ЗУ-2 9, ЗУ-3 13 - данные об азимуте оптической оси антенны в виде номеров текущего j и анализируемого j0 положений сектора сканирования.
Стробированное по дальности приемное устройство 1 суммарного канала моноимпульсной некогерентной БРЛС (фиг.1) предназначено для приема эхосигналов в N стробах дальности, соединенный с его выходом N-канальный некогерентный обнаружитель импульсных сигналов 2, используется для установления факта наличия или отсутствия цели в каждом из N стробов дальности с формированием признака наличия цели в i-том стробе (ПНЦ(1)) и передачи его на вход стробирования приемного устройства разностного угломестного канала 3 и на сигнальный вход ЗУ-2 9 (первый выход обнаружителя 2), для передачи (трансляции) сигнала приемного устройства суммарного канала в угловой дискриминатор 3 (второй выход обнаружителя 2) и модуля этого сигнала - в пороговое устройство 12 для установления факта наличия отражений от подстилающей поверхности требуемого уровня (третий выход обнаружителя 2).
Приемное устройство 3 разностного угломестного канала аналогично приемному устройству 1 суммарного канала за исключением того, что оно стробируется стробами дальности с теми номерами, которые определяются элементами дальности с обнаруженными в суммарном канале сигналами, для чего используется сигнал признака наличия цели ПНЦ(i), поступающий на его второй вход (вход стробирования).
Угловой дискриминатор 4, соединенный одним входом со вторым выходом обнаружителя 2 и другим входом - с выходом приемного устройства 3 разностного угломестного канала, служит для формирования сигнала углового рассогласования по углу места обнаруженного эхосигнала относительно равносигнального направления (РСН) антенной системы моноимпульсной БРЛС. Функциональный преобразователь 5 предназначен для преобразования сигнала углового рассогласования в элементе дальности в высоту обнаруженного объекта с учетом положения в вертикальной плоскости оптической оси антенны и дальности до этого объекта, формируя тем самым высотный "профиль" обнаруженных объектов вдоль развертки дальности для каждого положения луча антенны по азимуту (сектора сканирования) j (см. формулы (1), (2)).
Первое запоминающее устройство (ЗУ-1) 6 используется для записи вдоль развертки по дальности отсчетов высоты обнаруженных объектов, полученных в функциональном преобразователе 5, и их хранения для нескольких последовательных в ходе ведущегося обзора положений луча антенны по азимуту (секторов сканирования) j. Совокупность этих положений определяет протяженность по азимуту выбранного для получения оценок высоты рельефа подстилающей поверхности двумерного "следящего окна", связанного с анализируемым элементом разрешения (о понятии "следящее окно" см., например, Я.Д.Ширман, В.Н.Манжос. Теория и техника обработки радиолокационной информации на фоне помех, "Радио и связь", М., 1981, стр.316). Протяженность скользящего окна по дальности величиной 2·L (L - число элементов в каждой половине окна ЗУ-1) определяется из компромиссных соображений, учитывающих как необходимость получить статистически устойчивую оценку высоты рельефа местности в анализируемом стробе дальности, так и возможность неоднородности по дальности этого рельефа. Совокупность выходных сигналов в каждом из этих элементов памяти образует выходной сигнал на первом выходе запоминающего устройства ЗУ-1, а сигнал центрального элемента окна, содержащий информацию анализируемого строба дальности i0, образует сигнал на втором выходе первого запоминающего устройства ЗУ-1. Общее число положений по азимуту, для которых производится запоминание высотного "профиля" рельефа, равно М. Часть этого числа может относиться к азимутальным направлениям, зондируемым после прохождения в ходе сканирования контролируемого воздушного пространства анализируемого направления j0. В этом случае результаты селекции выдаются с запаздыванием относительно времени прохождения анализируемого положения луча по азимуту. Память ЗУ-1 6 разбита на блоки (страницы), в каждом из которых содержится информация одного азимутального направления, находящегося в пределах скользящего окна.
Блок оценки 7 математического ожидания и дисперсии высоты рельефа местности (параметров распределения высот) используется для получения выборочных среднего и дисперсии значений полученных отсчетов высоты объектов, окружающих анализируемый элемент разрешения. Алгоритмы расчета выборочных среднего и дисперсии значений случайных величин, каковыми являются отсчеты высоты рельефа местности, известны из литературы (см. ниже формулы (4)-(6)).
Первое пороговое устройство 8 предназначено для вычисления разности значений высоты обнаруженного объекта hц (формула (1)) и выборочного среднего высоты рельефа (формула (4)) в окрестности этого объекта, а затем сравнения этой разности с пороговым значением, которое определяется произведением среднеквадратического значения высоты (формула (5)) в скользящем окне (окрестности анализируемого элемента) на пороговый коэффициент.
Второе запоминающее устройство (ЗУ-2) 9 используется для хранения сигналов превышения порога (признаков наличия цели ПНЦ(i,j)) с выхода N-канального некогерентного обнаружителя импульсных сигналов 2 (здесь i - номер элемента дальности, j - номер углового сектора). Распределение памяти в ЗУ-2 9 аналогично распределению памяти в ЗУ-16.
Обнаружитель тени по логике "k из n" 10 предназначен для регистрации радиолокационной тени от высотного сооружения на местности. Здесь k - число выборочных значений сигналов, превысивших порог, из поданной на вход обнаружителя выборки сигналов объемом n. В основе принципа обнаружения тени лежит предположение об отсутствии сигналов, превышающих порог на участке развертки дальности, который примыкает к анализируемому элементу и имеет конечную протяженность, равную n. Пятый логический элемент (ЛЭ) "И" 11 используется для выбора решения относительно идентифицируемого обнаруженного объекта на основе наличия или отсутствия у него тени: высотный наземный объект (имеющий тень) или воздушный объект (не имеющий тени).
Второе пороговое устройство 12 с фиксированным порогом предназначено для установления факта наличия в элементе дальности сигнала отражений от подстилающей поверхности с требуемым уровнем. В третьем запоминающем устройстве 13, память в котором распределена так же, как и в первых двух, хранятся признаки наличия сигнала отражений от подстилающей поверхности требуемого уровня ППП(i).
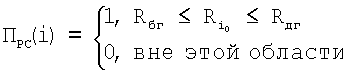
Назначение ЛЭ «И» 14, 15, 16, 17, а также ЛЭ «ИЛИ» 18, как и в прототипе, заключается в отборе лишь тех отметок (сигналов) цели, для которых выполнены условия селекции ВЦ/НЦ: обнаружение сигнала от подстилающей поверхности (признак ППП(i)=1) в пределах допустимого интервала дальностей, т.е. зоны разрешенной селекции (признак ПРС(i)=1) - первый ЛЭ «И» 14, вынесение решения об обнаружении наземной цели - второй ЛЭ «И» 15, вынесение решения об обнаружении воздушной цели при выполнении условий для дискриминации ВЦ/НЦ - третий ЛЭ «И» 16, вынесение решения об обнаружении воздушной цели в случаях, когда эти условия не выполняются - четвертый ЛЭ «И» 17, формирование объединенного решения об обнаружении воздушной цели - ЛЭ «ИЛИ» 18.
Вычислительное устройство ВУ 19, как и в прототипе, является частью вычислительной системы БРЛС. В нем производится определение необходимых для функционирования заявляемого устройства селекции ВЦ/НЦ числа n=nm - протяженности окна в обнаружителе тени 10 - по формуле:
 ,
,
где ΔR - протяженность элемента разрешения по дальности,
Н - высота носителя БРЛС;
Ri0 - расстояние до элемента дальности, в котором обнаружен объект (цель);
hц - вычисленное значение высоты обнаруженного объекта,
а также ближней Rбг и дальней Rдг границ зоны разрешенной селекции по известным формулам с использованием поступающих с бортовых датчиков значений угла отклонения антенны βРСН относительно горизонтальной плоскости, высоты полета носителя Н, ширины диаграммы направленности антенны БРЛС в вертикальной плоскости Δβ:
 ,
,  , 0<k<1,
, 0<k<1,
где параметр k определяет ширину зоны разрешенной селекции, и формирования признака нахождения сигнала цели в зоне разрешенной селекции ПРС(i)
Значения Rбг и Rдг рассчитываются с точностью, определяемой точностью бортовых датчиков.
Форма скользящего окна представлена на фиг.2. В отличие от обычно используемых в обнаружителях сигналов следящих окон для получения локальной оценки уровня помех в месте расположения сигнала это окно является двумерным. Учитывая возможное дробление эхосигнала между смежными элементами дальности и угловыми положениями луча, соседние элементы в следящее окно не включаются.
На фиг.3 представлен рисунок, поясняющий условия работы БРЛС и смысл входящих в формулы величин. Введены следующие обозначения: α - угол атаки носителя БРЛС (угол между строительной осью носителя и горизонтальной плоскостью), βРСН - угол места равносигнального направления (РСН) антенной системы относительно строительной оси носителя, Δε - угол рассогласования направления на цель и РСН в угломестной плоскости, Ri0 - расстояние до элемента дальности, в котором присутствует цель.
Заявляемое устройство работает следующим образом. При зондировании контролируемого пространства с помощью БРЛС в ходе сканирования по азимуту на выходе N-канального некогерентного обнаружителя импульсных сигналов 2 в суммарном канале появляются признаки превышения порога ПНЦ(i), свидетельствующие об обнаружении в элементе дальности (стробе) i эхосигнала с интенсивностью AΣ(i) (AΣ(i) - модуль сигнала SΣ(i) в стробе i; эхосигналы SΣ и SΔ поступают на входы приемных устройств суммарного и разностного угломестного каналов из антенного блока), превосходящей пороговое значение. Далее сигнал SΣ(i) для строба i приемного устройства 1 суммарного канала совместно с выходным сигналом SΔ(i) приемного устройства 3 разностного угломестного канала для этого же строба поступают на угловой дискриминатор 4 для выделения сигнала рассогласования по углу места Δε(i) направления на обнаруженный объект и РСН в вертикальной плоскости. После этого в функциональном преобразователе 5 осуществляется расчет высоты обнаруженного объекта hц(i) с использованием соотношений, справедливых для случая плоской Земли (нетрудно получить аналогичные соотношения при учете сферичности Земли):


где f-1(Uуд) - функция, обратная пеленгационной характеристике угломестного канала Uуд=f(Δε);
Н - высота носителя БРЛС;
α - угол атаки носителя БРЛС (значения угла атаки а и высоты носителя БРЛС Н поступают с бортовых датчиков);
Ri0 - расстояние до элемента дальности, в котором присутствует цель (дальность до обнаруженного объекта определяется произведением номера соответствующего строба дальности i0, поступающего с обнаружителя 2, и величины элемента разрешения по дальности ΔR);
Δε - угол рассогласования направления на цель и РСН в угломестной плоскости;
βрсн - угол места равносигнального направления антенной системы относительно строительной оси носителя.
В частности, для линейного участка пеленгационной характеристики угломестного канала f(Δε) угловое рассогласование можно определить как

где Sуд - крутизна пеленгационной характеристики угломестного канала.
Затем вычисленные значения высот поступают для записи в первое ЗУ-1 6, где сохраняются в ячейках с номерами i, равными номерам стробов дальности, для которых рассчитана высота, на странице j, связанной с соответствующим положением луча антенны по азимуту. Поскольку запись в ЗУ-1 и считывание из него данных для последующей обработки производится на скользящем окне, то после заполнения всех М страниц и получения статистических характеристик высотного профиля окрестности анализируемого элемента производится сдвиг всех данных на одну страницу в сторону меньших номеров, чтобы освободить место для записи вновь поступающих данных.
Следующим шагом обработки, который производится в блоке оценки 7 на основании данных, поступающих на его первый вход с первого выхода ЗУ-1 6, является получение, по заполнении всего скользящего окна, выборочных средних  и среднеквадратических
и среднеквадратических  значений распределения высот в окрестности анализируемого элемента дальности с использованием известных формул (С.А.Айвазян, И.С.Енюков, Л.Д.Мешалкин. Прикладная статистика, гл.8, "Финансы и статистика", М., 1983, стр.248)
значений распределения высот в окрестности анализируемого элемента дальности с использованием известных формул (С.А.Айвазян, И.С.Енюков, Л.Д.Мешалкин. Прикладная статистика, гл.8, "Финансы и статистика", М., 1983, стр.248)



В этих выражениях Si0j0 - множество элементов окна, привязанного к анализируемому элементу (i0, j0), где i0 - номер строба (элемента) дальности, j0 - номер углового сектора с анализируемым элементом, Zi0j0 - подмножество элементов множества Si0j0, для которых признак превышения порога обнаружения (признак наличия цели) ПНЦ(i,j)=0.
В вычислениях, которые производятся в блоке оценки 7, участвуют только те элементы дальности, в которых присутствуют сигналы, превысившие порог обнаружения. Для этого на второй вход блока оценки 7 из ЗУ-2 6 поступают запомненные значения признаков обнаружения ПНЦ(i,j). После формирования оценок математичекого ожидания и среднеквадратического значения высот в окрестности анализируемого элемента в первом пороговом устройстве 8 производится вычисление порога для него и сравнение значения высоты обнаруженного объекта с этим порогом. В случае превышения порога на выходе порогового устройства 8 признаку высотности Пh(i,j) обнаруженного объекта присваивается значение 1, в противном случае - значение 0.
Наряду с признаком высотности Пh(i,j) обнаруженного объекта для него на основании данных, хранящихся в ЗУ-2 9, в обнаружителе тени по логике "k из n" 10 формируется признак наличия радиолокационной тени Птен(i0,j0). Для этого каждому элементу дальности с обнаруженными объектами ставятся в соответствие логические значения 0 или 1 в зависимости от результата анализа последовательности из примыкающих друг к другу элементов дальности с номерами, следующими за номером анализируемого элемента дальности. Длина последовательности nm определяется по формуле
где ΔR - протяженность элемента разрешения по дальности,
в вычислительном устройстве 19, входящем в состав БЦВМ. Если во всех элементах этой последовательности сигнал отсутствует, то признаку Птен(i0,j0) присваивается логическое значение 0 (тень наличествует), в противном случае - логическое значение 1 (тень отсутствует).
Далее после сопоставлении обоих сформированных признаков (высотности Пh(i0,j0) и тени Птен(i0,j0)) с помощью пятого ЛЭ "И" 11 выносится предварительное решение о характере обнаруженной цели. Предварительное решение "высотный объект без тени" ("предположительно воздушная цель") с присвоением величине ПВЦ/НЦ(i0,j0) значения 1 принимается, если оба вышеуказанных признака равны 1, в противном случае принимается предварительное решение, что обнаружен "высотный объект с тенью" с присвоением ПВЦ/НЦ(i0,j0) значения 0.
Завершающий этап обработки данных состоит в проверке того, что предварительное решение в отношении селекции ВЦ/НЦ на выходе пятого ЛЭ "И" вынесено для разрешенной зоны, т.е. в пределах интервала дальностей, ограниченного ближней RБГ и дальней RДГ границами (Прс(i0,j0)=1), и при условии наличия отражений от подстилающей поверхности Ппп(i0,j0)=1 (результат этой проверки формируется на выходе первого ЛЭ "И" 14). Далее в случае логической 1 на выходе первого ЛЭ И" 14 второй ЛЭ "И" 15 формирует признак обнаружения наземной цели НЦ=1, а если на выходе первого ЛЭ "И" 14 - логический 0, то третий ЛЭ "И" 16 формирует условный признак обнаружения воздушной цели при выполнении условий селекции. Этот последний в ЛЭ "ИЛИ" 18 логически объединяется с условным признаком обнаружения воздушной цели, если условия селекции не выполняются (на выходе четвертого ЛЭ "И" 17 логическое значение 1), для формировании общего признака обнаружения воздушной цели на выходе ВЦ=1.
Для выполнения заявляемого устройства могут быть использованы, например, отечественные микросхемы на МОП-транзисторах серий К156, К561, К566 и т.п. или зарубежные аналоги: микросхемы серий 4000, МАХ300 и др., а также микропроцессорные наборы подходящих серий. В качестве ЗУ может быть использована также часть памяти бортовой вычислительной системы.
Использование изобретения позволит обеспечить различение маловысотных воздушных объектов, включая зависшие вертолеты, с помощью некогерентных БРЛС или в некогерентных режимах когерентных БРЛС.
Изобретение относится к бортовым радиолокационным станциям (БРЛС) летательных аппаратов. Достигаемым техническим результатом изобретения является возможность различения маловысотных воздушных и наземных целей при их обнаружении с помощью некогерентных моноимпульсных БРЛС или в некогерентных режимах когерентных БРЛС. Указанный результат достигается за счет того, что заявленное устройство содержит приемное устройство суммарного канала БРЛС и некогерентный обнаружитель в суммарном канале, приемное устройство разностного угломестного канала, угловой дискриминатор, пять логических элементов «И», логический элемент «ИЛИ», вычислительное устройство, функциональный преобразователь угол места - высота рельефа местности, три запоминающих устройства, два пороговых устройства, блок оценки математического ожидания и дисперсии высоты рельефа местности, соединенные определенным образом между собой. 3 ил.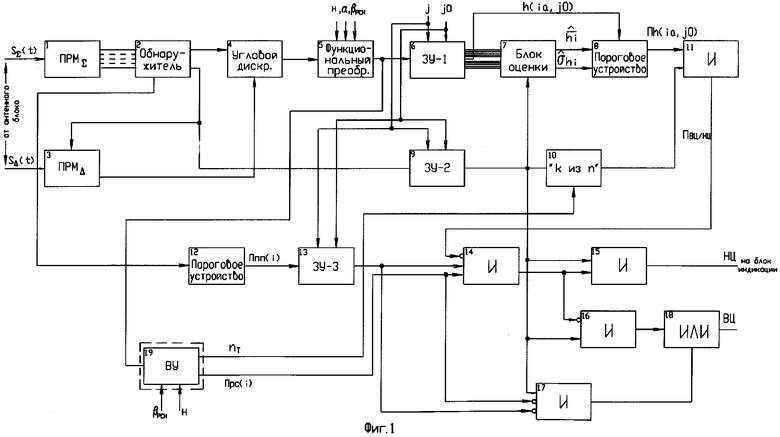
Устройство селекции маловысотных воздушных и наземных целей в бортовой радиолокационной станции (БРЛС), содержащее стробируемое по дальности N стробами (N - число стробов дальности, перекрывающих диапазон ожидаемых задержек эхосигналов целей) приемное устройство суммарного канала моноимпульсной БРЛС, N-канальный выход которого соединен с соответствующими входами N-канального некогерентного обнаружителя импульсных сигналов, приемное устройство разностного угломестного канала, вход стробирования которого соединен с первым выходом упомянутого обнаружителя, угловой дискриминатор, первый вход которого соединен с вторым выходом упомянутого обнаружителя, а второй вход - с выходом упомянутого приемного устройства разностного угломестного канала, первый логический элемент (ЛЭ) "И", выход которого соединен со вторым входом второго ЛЭ "И", предназначенного для вынесения решения об обнаружении наземной цели, и инвертированным (вторым) входом третьего ЛЭ "И", ЛЭ "ИЛИ", предназначенный для вынесения объединенного решения об обнаружении воздушной цели, первый вход которого соединен с выходом третьего ЛЭ "И", а второй вход - с выходом четвертого ЛЭ "И", вычислительное устройство, формирующее на основании подаваемых на его первый вход с бортовых датчиков данных о высоте полета носителя и угле наклона антенны признак нахождения эхосигнала цели в зоне разрешенной селекции, который с его первого выхода поступает на третий вход первого ЛЭ «И» и второй (инвертированный) вход четвертого ЛЭ «И», отличающееся тем, что в него дополнительно введены функциональный преобразователь угол места - высота рельефа местности, первое запоминающее устройство, блок оценки математического ожидания и среднеквадратического значения распределения высот на скользящем окне и первое пороговое устройство, второе и третье запоминающие устройства, обнаружитель тени по логике «k из n», второе пороговое устройство, пятый логический элемент «И» так, что выход углового дискриминатора соединен с первым входом упомянутого функционального преобразователя, выход которого соединен со вторым входом вычислительного устройства и с сигнальным входом первого запоминающего устройства, первый выход которого соединен с первым входом блока оценки математического ожидания и среднеквадратического значения распределения высот на скользящем окне, а второй выход соединен с первым входом первого порогового устройства, на второй и третий входы которого поступают сигналы оценки математического ожидания и среднеквадратического значения высоты рельефа местности соответственно с первого и второго выходов блока оценки, выход первого порогового устройства соединен с первым входом пятого ЛЭ "И", второй вход которого соединен с выходом обнаружителя тени по логике "k из n", a выход пятого ЛЭ "И" соединен с инвертированным (первым) входом первого ЛЭ "И", сигнальный вход второго запоминающего устройства соединен с первым выходом упомянутого N-канального некогерентного обнаружителя импульсных сигналов, а его выход соединен с первым входом обнаружителя тени по логике "k из n", с вторым входом блока оценки, с первыми входами второго ЛЭ "И", третьего ЛЭ "И" и четвертого ЛЭ "И", вход второго порогового устройства соединен с третьим выходом упомянутого обнаружителя, а выход - с сигнальным входом третьего запоминающего устройства, выход которого соединен со вторым входом первого ЛЭ "И" и инвертированным (третьим) входом четвертого ЛЭ "И", второй выход вычислительного устройства соединен с вторым входом обнаружителя тени по логике "k из n", а данные с бортовых датчиков о высоте полета и угле атаки носителя, а также об угле наклона антенны дополнительно поступают на второй вход упомянутого функционального преобразователя угол места - высота рельефа местности, данные об азимуте оптической оси антенны БРЛС в виде номеров текущего j и анализируемого j0 положений сектора углового сканирования поступают на управляющие входы первого, второго и третьего запоминающих устройств.
| US 4862177, 29.08.1989 | |||
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| WO 2006133268 А2, 14.12.2006 | |||
| СПЛАВ ДЛЯ РАСКИСЛЕНИЯ И ЛЕГИРОВАНИЯ СТАЛИ | 0 |
|
SU395480A1 |
| US 4743908, 10.05.1988 | |||
| US 4549184, 22.10.1985. | |||

