Изобретение относится к радиолокационным измерителям угловых координат (УК) целей, а именно к устройствам оценки УК целей для моноимпульсных радиолокаторов (МРЛК), и может найти применение при сопровождении целей на проходе.
Известно устройство оценки УК для МРЛК [Л.1, рис. 10.9 на с.297], содержащее делитель и источник калибровочного напряжения, соответствующего пеленгационной чувствительности (крутизне μ0 пеленгационной характеристики) на равносигнальном направлении (РСН), причем первый вход делителя является входом устройства для сигнала пеленгационной ошибки (СПО) Uα МРЛК, второй вход делителя подключен к указанному источнику калибровочного напряжения μ0, a выход делителя является выходом данного устройства оценки УК целей.

Недостатком известного устройства является снижение точности оценки УК при отклонении цели от РСН, ввиду существенной пространственной нелинейности пеленгационной характеристики и зависимости ее крутизны от ортогональной координаты [Л.2, с.57, рис.2.12].
Известно также устройство оценки УК целей для МРЛК, содержащее индикатор нуля (ИО) СПО, выходной сигнал которого служит для фиксации цели на РСН, то есть нулевого значения УК  при Uα=0 [Яп. Патент №498896, G 01 S 9/44 от 18.01.74 г.], что устраняет необходимость в калибровке СПО по крутизне пеленгационной характеристики и связанные с ней ошибки в оценке УК. Однако так как УК в плоскости ортогональной плоскости сканирования не обнуляется, то для ее оценки данное устройство не может быть использовано [Л.3, с.140].
при Uα=0 [Яп. Патент №498896, G 01 S 9/44 от 18.01.74 г.], что устраняет необходимость в калибровке СПО по крутизне пеленгационной характеристики и связанные с ней ошибки в оценке УК. Однако так как УК в плоскости ортогональной плоскости сканирования не обнуляется, то для ее оценки данное устройство не может быть использовано [Л.3, с.140].
Известно также устройство по Патенту DE 978347, G 01 S 9/02 от 7.05.65 г., которое азимутальную и угломестную координаты цели оценивает для радиолокатора с вращающейся относительно оси антенны парой облучателей.
Наиболее близким к предложенному является устройство оценки УК целей для МРЛК по Патенту RU 2144199, G 01 S 3/10 от 28.07.89 г., функциональная схема которого изображена в приложении (фиг.3).
Оно содержит два индикатора нуля ИО, первый сумматор, определитель полярности сигнала, а также включенные последовательно первый определитель приращения угла пеленга антенны, определитель модуля сигнала и умножитель, причем входы устройства для азимутального Uα и угломестного Uβ СПО через первый сумматор соединены с входом первого индикатора нуля ИО, вход устройства для азимутального Uα СПО соединен также с входом второго индикатора нуля ИО, выходы обоих индикаторов нулей соединены с управляющими входами первого определителя приращения угла пеленга антенны, сигнальный вход которого является входом устройства для сигнала пеленга антенны в азимутальной плоскости, вход устройства для угломестного Uβ СПО через определитель полярности сигнала соединен со вторым входом умножителя, выход которого является выходом устройства для сигнала оценки угломестной координаты цели  , а выход второго индикатора нуля ИО является выходом устройства для сигнала оценки нулевого значения азимутальной координаты цели
, а выход второго индикатора нуля ИО является выходом устройства для сигнала оценки нулевого значения азимутальной координаты цели 
В результате, величина  определяется приращением пеленга антенны в азимутальной плоскости
определяется приращением пеленга антенны в азимутальной плоскости  а знак
а знак  - знаком угломестного Uβ СПО по следующей формуле:
- знаком угломестного Uβ СПО по следующей формуле:

где 
 и
и  - углы пеленга антенны в азимутальной плоскости при Uα=0, Uα+Uβ=0, соответственно.
- углы пеленга антенны в азимутальной плоскости при Uα=0, Uα+Uβ=0, соответственно.
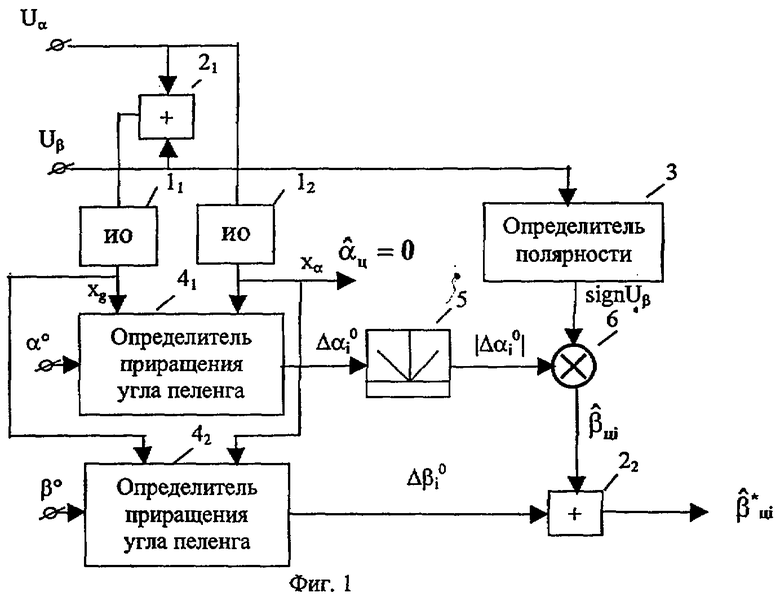
Недостатком известного устройства является снижение точности оценки УК целей при несовпадении наклона плоскости сканирования антенны с наклоном одной из плоскостей пеленгации, поскольку формула (1) для  не учитывает наличие приращения угла пеленга антенны в угломестной плоскости
не учитывает наличие приращения угла пеленга антенны в угломестной плоскости  как показано на фиг.2 прилагаемых чертежей.
как показано на фиг.2 прилагаемых чертежей.
Технической задачей, решаемой предложенным устройством, является устранение указанного недостатка, а именно, повышение точности оценки угломестной координаты при несовпадении наклона плоскости сканирования антенны с наклоном одной из плоскостей пеленгации.
Данная техническая задача решается тем, что в известное устройство оценки УК целей для МРЛК дополнительно введены второй сумматор 22 и второй определитель приращения угла пеленга антенны 42, сигнальный вход которого является входом устройства для сигнала оценки угла пеленга антенны в угломестной плоскости β0, управляющие входы объединены с идентичными входами первого определителя приращения угла пеленга антенны 41, а выход которого объединен с выходом умножителя 6 посредством второго сумматора 22, выход которого является выходом устройства для сигнала оценки угломестной координаты цели 
Блоки 22 и 42 и их функциональные связи обеспечивают повышение точности оценки угломестной координаты цели  путем автоматической коррекции значения
путем автоматической коррекции значения  (формула 1) по величине приращения угла пеленга антенны в угломестной плоскости
(формула 1) по величине приращения угла пеленга антенны в угломестной плоскости 
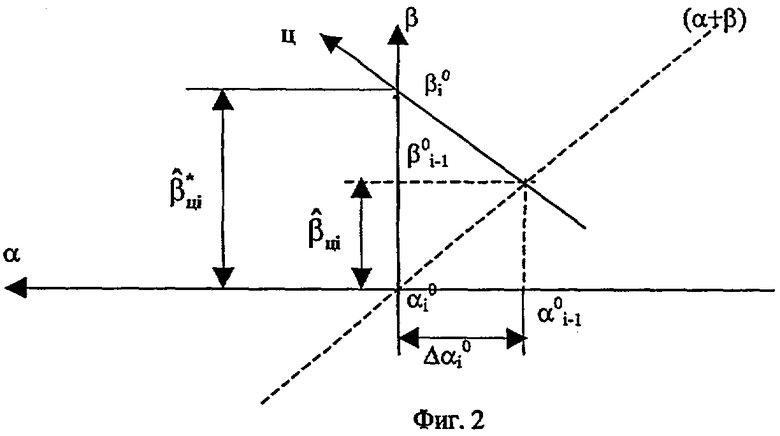
Функциональная схема предложенного устройства показана на фиг.1, а функциональная схема прототипа - в приложении. Достигаемый технический результат поясняется графически на фиг.2.
Предлагаемое устройство содержит:
- два индикатора нуля ИО - 11 и 12;
- два сумматора - 21 и 22;
- определитель полярности сигнала 3;
- два определителя приращения угла пеленга антенны 41 и 42;
- определитель модуля сигнала 5;
- умножитель 6.
Входы устройства для азимутального Uα и угломестного Uβ СПО через первый сумматор 21 соединены с входом первого индикатора нуля ИО-11, вход устройства для азимутального Uα СПО соединен также с входом второго индикатора нуля ИО-12, выходы обоих индикаторов нулей соединены с управляющими входами первого и второго определителей приращения углов пеленга антенны 41, 42, сигнальные входы которых являются входами устройства для сигналов оценки углов пеленга антенны в азимутальной и угломестной плоскостях α0, β0, вход устройства для угломестного СПО через определитель полярности сигнала 3 соединен со вторым входом умножителя 6, а выход второго индикатора нуля 12 является выходом устройства для сигнала оценки нулевого значения азимутальной координаты цели 
Моноимпульсный радиолокатор с выходами для азимутального Uα и угломестного Uβ СПО и для сигналов оценки углов пеленга антенны в азимутальной α0 и угломестной β0 плоскостях известен, например, по научно-технической литературе [Л.4, рис.4.10 на с.78].
Предложенное устройство работает следующим образом. На входы устройства поступают азимутальный Uα и угломестный Uβ СПО, из которых посредством первого сумматора 21 формируется суммарный сигнал Uα+Uβ.
При сканировании антенны посредством индикаторов нулей ИО-11 и ИО-12 поочередно фиксируются моменты нахождения цели в диагональном (Uα+Uβ=0) и в главном (Uα=0 и  ) сечениях координатной плоскости. При этом на выходах блоков 11 и 12 формируются сигналы Xgi-1=1 и Xαi=1, соответственно.
) сечениях координатной плоскости. При этом на выходах блоков 11 и 12 формируются сигналы Xgi-1=1 и Xαi=1, соответственно.
На входы данного устройства поступают также сигналы углов пеленга антенны в азимутальной α0 и угломестной β0 плоскостях.
Блоки 41 и 42 оценивают приращения указанных углов  и
и  в интервале между моментами формирования сигналов Xgi-1=1 и Xαi=1, поступающих на их управляющие входы, как показано на фиг.1.
в интервале между моментами формирования сигналов Xgi-1=1 и Xαi=1, поступающих на их управляющие входы, как показано на фиг.1.
Блоки 3, 5 и 6, как и в известном устройстве, формируют оценку угла места цели  в соответствии с выражением (1)
в соответствии с выражением (1)

Блоки 42 и 22 в предложенном устройстве выполняют автоматическую коррекцию  на величину
на величину  обусловленную несовпадением наклона плоскости сканирования с азимутальной плоскостью.
обусловленную несовпадением наклона плоскости сканирования с азимутальной плоскостью.
При этом формируется сигнал

как показано на фиг.2 прилагаемых чертежей.
В результате, для угла несовпадения указанных плоскостей в 45° (т.е. при  ) выигрыш в точности, достигаемый предложенным устройством, равен двум.
) выигрыш в точности, достигаемый предложенным устройством, равен двум.
ЛИТЕРАТУРА
1. П.И.Дудник, Ю.И.Чересов. Авиационные радиолокационные устройства. Изд. ВВИА им. Н.Е.Жуковского, 1986 г.
2. Д.Бертон, Г.Вард. Справочник по радиолокационным устройствам. М.: Сов. Радио, 1976 г.
3. Н.Т.Василенко. Радиолокационные системы селекции движущихся целей. (Итоги науки и техники). Серия Радиотехника, т.23, М.: 1980 г.
4. А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. М.: Радио и связь, 1984 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1996 |
|
RU2107305C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ГРУППОВОЙ ЦЕЛИ ДЛЯ БОРТОВОГО ОБЗОРНОГО РАДИОЛОКАТОРА | 1997 |
|
RU2143706C1 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| МОНОИМПУЛЬСНЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2364882C2 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| СПОСОБ И УСТРОЙСТВО КОРРЕЛЯЦИОННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ | 2006 |
|
RU2350977C2 |
| СПОСОБ ИЗМЕРЕНИЯ РЕАКТИВНОЙ МОЩНОСТИ В ТРЕХФАЗНОЙ СИММЕТРИЧНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2629907C1 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |

Изобретение относится к радиолокационным измерителям угловых координат (УК) при сопровождении целей на проходе. Технический результат - повышение точности - достигается введением дополнительных блоков определения приращения угла пеленга антенны и сумматора, что обеспечивает оценку значения одной (угломестной) координаты  по значениям приращений углов пеленга антенны в обоих плоскостях азимута
по значениям приращений углов пеленга антенны в обоих плоскостях азимута  и угла места
и угла места  по формуле
по формуле  где Uβi - угломестный сигнал пеленгационной ошибки (СПО). Индексы i; (i-1) - соответствуют моментам обнуления азимутального Uαi=0 и комбинированного (Uα+Uβ)i-1 СПО, соответственно. Устройство содержит два индикатора нуля, два определителя пеленга антенны, определитель полярности, два сумматора и индикатор нуля. 3 ил.
где Uβi - угломестный сигнал пеленгационной ошибки (СПО). Индексы i; (i-1) - соответствуют моментам обнуления азимутального Uαi=0 и комбинированного (Uα+Uβ)i-1 СПО, соответственно. Устройство содержит два индикатора нуля, два определителя пеленга антенны, определитель полярности, два сумматора и индикатор нуля. 3 ил.
Устройство оценки угловых координат целей для моноимпульсных радиолокаторов, содержащее два индикатора нуля (ИО), первый сумматор, определитель полярности сигнала, а также включенные последовательно первый определитель приращения угла пеленга антенны, определитель модуля сигнала и умножитель, причем входы устройства для азимутального и угломестного сигналов пеленгационных ошибок (СПО) через первый сумматор соединены со входом первого ИО, вход устройства для азимутального СПО соединен также со входом второго ИО, выходы обоих ИО соединены с управляющими входами первого определителя приращения угла пеленга антенны, сигнальный вход которого является входом устройства для сигнала оценки угла пеленга антенны в азимутальной плоскости, вход устройства для угломестного СПО через определитель полярности сигнала соединен со вторым входом умножителя, а выход второго ИО является выходом устройства для сигнала оценки нулевого значения азимутальной координаты цели, отличающееся тем, что в него дополнительно введены второй сумматор и второй определитель приращения угла пеленга антенны, сигнальный вход которого является входом устройства для сигнала оценки угла пеленга антенны в угломестной плоскости, управляющие входы объединены с идентичными входами первого определителя приращения угла пеленга антенны, а выход которого объединен с выходом умножителя посредством второго сумматора, выход которого является выходом устройства для сигнала оценки угломестной координаты цели.
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ГРУППОВОЙ ЦЕЛИ ДЛЯ БОРТОВОГО ОБЗОРНОГО РАДИОЛОКАТОРА | 1997 |
|
RU2143706C1 |
| RU 2052834 C1, 20.01.1996 | |||
| US 6184830 B1, 06.02.2001 | |||
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ СУДНА В ДВИЖЕНИЕ | 1934 |
|
SU39601A1 |
| US 5926135 А, 20.07.1999. | |||

