Предлагаемое изобретение относится к навигации и может быть использовано для определения координат подвижных объектов, движущихся по известному маршруту, например железнодорожных поездов с высокой точностью.
Известен способ определения координат подвижных объектов, основанный на приеме сигналов космических аппаратов глобальных навигационных спутниковых систем, измерении псевдодальностей от навигационных космических аппаратов и определении координат подвижного объекта по измеренным псевдодальностям. [Радиотехнические системы/ Ю.П.Гришин, В.П.Ипатов, Ю.М.Казаринов и др. - М. Высш.шк., 1990, 496 с., стр. 302].
Этот способ обеспечивает определение местоположения подвижных объектов в любое время и в любой точке Земного шара. Погрешность определения координат этим способом составляет порядка 50 - 150 метров.
Недостатком способа является недостаточно высокая точность определения местоположения подвижного объекта. В ряде случаев требуется обеспечение погрешности 3-10 метров.
Известен способ определения координат объектов, взятый в качестве прототипа, основанный на приеме на подвижном объекте и контрольно-корректирующей станции с известными координатами сигналов космических аппаратов глобальных навигационных спутниковых систем, измерении на подвижном объекте и контрольно-корректирующей станции псевдодальностей от соответствующих навигационных космических аппаратов, определении поправок к измеряемым псевдодальностям по разности между измеренными и истинными дальностями, передаче поправок с контрольно-корректирующей станции на подвижный объект и определении координат подвижного объекта по измеренным на подвижном объекте псевдодальностям с учетом поправок, переданных с контрольно-корректирующей станции [B.С. Шебшаевич, П. П. Дмитриев, Н.В. Иванцевич и др.; Под ред. B.С. Шебшаевича. - 2-е изд. , перераб. и доп. - М.: Радио и связь, 1993. - 408 с.: ил. - ISBN 5-256-00174-4, стр. 282].
Недостатком этого способа является повышенная сложность его реализации, связанная с необходимостью установки специальной аппаратуры в фиксированной точке с известными координатами и передачи поправок на подвижный объект, что может быть осуществлено только при помощи радиоканала.
Как видно из анализа рассмотренных способов, они имеют ряд недостатков, не позволяющих обеспечить высокоточное определение координат без существенного аппаратурного усложнения при их реализации.
В основу изобретения положена задача повышения точности определения координат подвижных объектов практически без усложнения аппаратуры, реализующей способ, путем использования априорных сведений, связанных с движением объекта по известному маршруту, например по железной дороге.
Поставленная задача достигается тем, что в способе определения местоположения подвижных объектов, основанном на приеме сигналов космических аппаратов глобальных навигационных спутниковых систем, измерении псевдодальностей, введении поправок и вычислении координат объекта, согласно изобретению проводят n измерений псевдодальностей и вычислений координат объекта, движущегося по известному маршруту, например по железной дороге, определяют точки xi0, yi0, zi0, лежащие на известном маршруте и соответствующие кратчайшему расстоянию до точек с измеренными координатами xi *, yi *, zi *, и определяют поправки путем решения системы из 3n уравнений:
где i = 1, n;
axxi, axyi, axzi, ayxi, ayyi, ayzi, azxi, azyi, azzi - коэффициенты пересчета координат из специальной топоцентрической системы координат с центром в точке xi0, yi0, zi0, осями Xтi и Yтi, лежащими в горизонтальной плоскости и осью Zтi, направленной вертикально вверх, причем точка xi, yi, zi лежит в плоскости (Xтi, Zтi), а касательная к известному маршруту лежит в плоскости (Yтi, Zтi), в геоцентрическую систему координат:
Δxi = bxxi(xi * - xi0) + bxyi(yi * - yi0) + bxzi(zi *- zi0),
Δzi = bzxi(xi * - xi0) + bzyi(yi * - yi0) + bzzi(zi *- zi0);
bxxi, bxyi, bxzi, bzxi, bzyz, bzxzi - коэффициенты пересчета координат из геоцентрической системы координат в специальную топоцентрическую систему координат с указанными характеристиками;
Δyi - n сопутствующих неизвестных,
Δx, Δy, Δz - определяемые поправки.
Сущность предлагаемого способа заключается в следующем.
Измерение координат при помощи глобальных навигационных спутниковых систем производится путем измерения псевдодальностей Ri от точки, в которой находится объект, до точки нахождения навигационных космических аппаратов. Первичное определение координат производится в так называемой геоцентрической системе координат с центром, находящимся в центре Земли.
При определении координат при помощи глобальных навигационных спутниковых систем возникают систематические погрешности, связанные с эфемеридной, ионосферной, атмосферной и др. составляющими. Это так называемые сильно коррелированные составляющие погрешности, которые медленно изменяются во времени и пространстве. Благодаря этому их свойству, систематические погрешности при определенных условиях можно уменьшить или исключить. Местоположение объекта, координаты которого измеряются, находится на известном маршруте движения, например, как это происходит на железной дороге или автомобильной трассе. При движении объекта по известному маршруту первичные координаты, измеренные традиционным способом, будут находиться вследствие погрешности не на линии маршрута, а в стороне от него. Поскольку уравнение маршрута известно, можно определить точку xi0, yi0, zi0, лежащую на маршруте и соответствующую кратчайшему расстоянию от точки с измеренными координатами до линии маршрута.
Обозначим координаты точки истинного положения объекта на маршруте через xi, yi, zi, а измеренные координаты через xi *, yi *, zi *.
Систематические погрешности определения координат в геоцентрической системе, которые обозначим через Δx, Δy, Δz, не зависят от номера измерения, то есть от местоположения объекта.
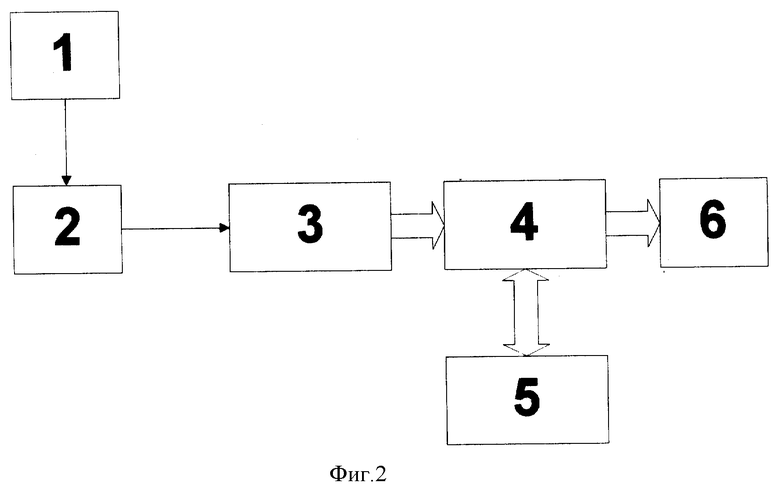
Введем специальную топоцентрическую систему координат с центром в точке xi0, yi0, zi0, осями Xтi и Yтi, лежащими в горизонтальной плоскости, и осью Zтi, направленной вертикально вверх, причем точка лежит в плоскости (Xтi, Zтi), а касательная к известному маршруту лежит в плоскости (Yтi, Zтi) (см. фиг.1). Обозначим координаты истинного положения объекта в специальной топоцентрической системе координат через xTi, yTi, zTi, а измеренные координаты через xTi *, yTi *, zTi *.
В специальной топоцентрической системе координат, т.е. по осям Xтi, Yтi, Zтi, погрешности первичного определения координат соответствуют Δxi, Δyi, Δzi. Истинное местоположение объекта в специальной топоцентрической системе координат находится на оси Yтi и имеет следующие координаты: xTi = 0, yTi = Δ yi, zTi = 0. Измеренные координаты в специальной топоцентрической системе координат равны
x
Эти координаты связаны с их значениями в геоцентрической системе координат следующими линейными соотношениями:
xTi * = bxxi(xi * - xi0) + bxyi(yi * - yi0) + bxzi(zi * - zi0),
yTi * = 0
zTi * = bzxi(xi * - xi0) + bzyi(yi * - yi0) + bzzi(zi * - zi0), (2)
где bxxi, bxyi, bxzi, bzxi, bzyz, bzxzi - коэффициенты пересчета координат из геоцентрической системы координат в специальную топоцентрическую систему координат с указанными характеристиками.
Как видно из (1, 2), систематические погрешности в специальной топоцентрической системе координат по осям Xтi, Zтi равны значениям измеренных координат по этим осям.
Учитывая, что параметры специальной топоцентрической системы координат известны, определение коэффициентов пересчета осуществляют по известным правилам преобразования координат из одной системы координат в другую. Систематические погрешности Δx, Δy, Δz в геоцентрической системе координат связаны с систематическими погрешностями в специальной топоцентрической системе координат Δxi, Δyi, Δzi следующими линейными соотношениями:
где i = 1, n
axxi, axyi, axzi, ayxi, ayyi, ayzi, azxi, azyi, azzi- (4)
коэффициенты пересчета координат из специальной топоцентрической системы координат в геоцентрическую систему координат,
Система (3) содержит 3n уравнений и 3+n(Δx, Δy, Δz и Δyi) неизвестных и решается методом наименьших квадратов. Например, при n = 2 система преобразуется к следующему виду (в матричной форме):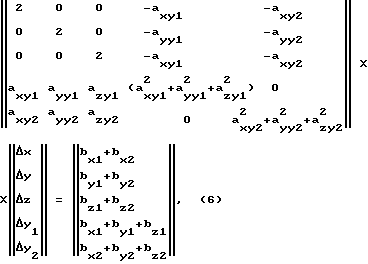
где:
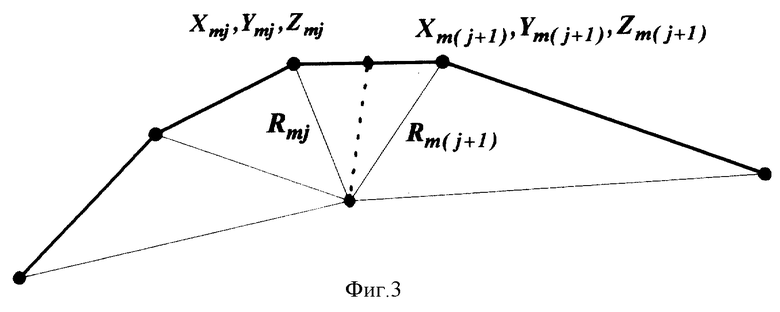
На фиг. 1 приведена специальная топоцентрическая система координат, на которой приведены точки, соответствующие измеренным и истинным координатам; на фиг. 2 приведена структурная схема устройства, реализующего предложенный способ, на фиг. 3 приведен график, аппроксимирующий маршрут движения объекта отрезками прямых.
Устройство содержит последовательно включенные антенну 1, радиотракт 2, блок цифровой обработки 3, микропроцессорный блок 4, блок базы данных 5, а также индикатор 6, подключенный к микропроцессорному блоку 4.
Предлагаемый способ реализуется следующим образом. Сигналы от космических аппаратов глобальных навигационных спутниковых систем принимаются антенной 1 и поступают в радиотракт 2. Радиотракт 2 осуществляет усиление, фильтрацию и перенос спектра принимаемых сигналов на промежуточную частоту. Далее сигнал промежуточной частоты преобразуется в цифровую форму. Обработка цифрового сигнала производится многоканальным блоком 3 цифровой обработки сигналов.
Блок цифровой обработки сигналов выполняет следующие функции:
- формирование квадратурных опорных сигналов перестраиваемых по частоте и фазе в соответствии с принимаемыми сигналами навигационных космических аппаратов, например ГЛОНАСС и GPS;
- формирование опорных сигналов псевдослучайных последовательностей (ПСП) навигационных космических аппаратов, перестраиваемых по задержке;
- перемножение входного сигнала на опорные сигналы литерной частоты и ПСП;
- формирование отсчетов корреляционных интегралов на интервале измерения.
Накопленные на интервале измерения значения корреляционных интегралов передаются по шине в микропроцессорный вычислительный блок 4.
Микропроцессорный вычислительный блок 4 выполняет следующие функции:
поиск сигнала по задержке и доплеровскому сдвигу частоты;
- слежение за сигналом по задержке и фазе;
- измерение радионавигационных параметров сигнала (задержки распространения и доплеровского сдвига частоты);
- демодуляцию цифровой информации, поступающей с навигационных космических аппаратов;
- декодирование цифровой информации, принятой с навигационных космических аппаратов, и расчет их координат на текущее время;
- по результатам измерения задержки сигналов и координатам навигационных космических аппаратов вычисление координат подвижного объекта xi *, yi *, zi *; - определение точки xi0, yi0, zi0, лежащей на маршруте и соответствующей кратчайшему расстоянию до точки с измеренными координатами xi *, yi *, zi *;
- определение коэффициентов пересчета координат из специальной топоцентрической системы координат в геоцентрическую систему координат axxi, axyi, axzi, ayxi, ayyi, ayzi, azxi, azyi, azzi и коэффициентов пересчета координат из геоцентрической системы координат в специальную топоцентрическую координат bxxi, bxyi, bxzi, bzxi, bzyz, bzxzi;
- определение Δxi, Δzi из соотношений (5);
- определение неизвестных поправок Δx, Δy, Δz путем решения системы уравнений (3);
- определение координат подвижного объекта с повышенной точностью путем введения поправок Δx, Δy, Δz в ранее вычисленные координаты xi *, yi *, zi *.
Декодирование цифровой информации, принятой с навигационных космических аппаратов, и формирование их координат производится в соответствии с алгоритмами, описанными в [Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ (третья редакция) / Координационный научно-информационный центр Военно-космических сил Российской Федерации - М.: 1995 г, стр. 29-41; Сетевые спутниковые радионавигационные системы /B.С. Шебшаевич, П. П. Дмитриев, Н.В. Иванцевич и др.; Под ред. B.С. Шебшаевича. - 2-е изд. , перераб. И доп. - М.: Радио и связь, 1993. - 408 с.: ил. - ISBN 5-256-00174-4, стр. 163-182].
Определение координат подвижного объекта хi *, yi *, zi * производится по результатам измерений задержек сигналов навигационных космических аппаратов и значений их координат. Методы навигационных определений подробно описаны в [Сетевые спутниковые радионавигационные системы /B.С. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др.; Под ред. B.С. Шебшаевича. - 2-е изд., перераб. И доп. - М. : Радио и связь, 1993. - 408 с.: ил. - ISBN 5-256-00174-4, стр. 163-182, стр.46; Бортовые устройства спутниковой радионавигации /И.В. Кудрявцев, И.Н. Мищенко, А.И. Волынкин, 201 с. стр. 62].
Определение точки xi0, yi0, zi0, лежащей на маршруте и соответствующей кратчайшему расстоянию до точки с измеренными координатами хi *, yi *, zi *, производится из следующих соображений. Данные о маршруте, записанные в базе данных 5 (см. фиг. 2), могут иметь различное представление. Наиболее простым представлением маршрута движения объекта, например локомотива (поезда), по железной дороге является линейно-ломанная аппроксимация. В этом случае железная дорога представляется в виде примыкающих друг к другу отрезков, концы которых имеют координаты xmj, ymj, zmj, каждый отрезок характеризуется парой точек с координатами
xmj, ymj, zmj и xm(j+1), ym(j+1), zm(j+1). (8)
Для нахождения точки минимального расстояния сначала необходимо найти ближайший отрезок к точке с измеренными координатами xi *, yi *, zi *. Для этого необходимо путем перебора расстоянии Rmj от точки xi *, yi *, zi * до точек xmj, ymj, zmj, соответствующих концу отрезков, аппроксимирующих маршрут железной дороги (рассмотрим на примере железной дороги) и равных (см. фиг. 3)
Координаты концов отрезка, соответствующего минимальному расстоянию от точки с измеренными координатами, обозначим:
x*mj, y*mj, z*mj, x*m(j+1), y*m(j+1), z*m(j+1). (10)
После определения координат (10) можно утверждать, что точка с минимальным расстоянием на маршруте находится на прямой, проходящей через точки x*mj, y*mj, z*mj и x*m(j+1), y*m(j+1), zm(j+1) *, которая описывается уравнением
где lx = x*m(j+1) - x*mj, ly = y*m(j+1) - y*mj, lz = z*m(j+1) - z*mj. (12)
Таким образом, точка xi0 yi0, zi0, соответствующая минимальному расстоянию, определяется пересечением прямой (11) и плоскости, проходящей через точку с измеренными координатами и перпендикулярной прямой (11). Координаты этой точки соответствуют решению системы уравнений
lx(x-xi *) + (ly(y-yi *) + lz(z-zi *) = 0
ly(x-x*mj) - lx(y-y*mj) = 0
lz(x-x*mj)-lx(z-z*mj) = 0. (13)
Определение коэффициентов пересчета координат из специальной топоцентрической системы координат в геоцентрическую систему координат axxi, axyi, axzi, ayxi, ayyi, ayzi, azxi, azyi, azzi и коэффициентов пересчета координат из геоцентрической системы координат в специальную топоцентрическую координат bxxi, bxyi, bxzi, bzxi, bzyz, bzxzi производится путем их извлечения из блока базы данных. База данных конструктивно представляет из себя постоянное запоминающее устройство, в котором записаны цифровые значения коэффициентов пересчета. Запись и, соответственно, извлечение коэффициентов пересчета производится по адресу, определяемому координатами точки xi0, yi0, zi0. Запись коэффициентов пересчета производится один раз при описании параметров маршрута, например, для железной дороги, эти коэффициенты практически не изменяются в течение длительного времени, так как они определяются профилем дороги, который закладывается при ее проектировании и строительстве.
Ключом к базе данных являются координаты xi, yi, zi подвижного объекта, вычисленные по результатам измерения задержки сигналов. Из базы данных выбираются коэффициенты пересчета, соответствующие вычисленным координатам подвижного объекта. Координаты xmj, ymj, zmj концов отрезков, аппроксимирующих профиль маршрута, также хранятся в базе данных.
Изобретение относится к навигации и может быть использовано для определения координат объектов, движущихся по определенному маршруту. Достигаемый технический результат - повышение точности определения координат подвижных объектов. Сущность предложенного способа заключается в введении поправок в вычисления координат объекта, движущегося по известному маршруту, в частности по железной дороге, получаемых на основании решения системы уравнений, позволяющего определить эти поправки. 1 з.п.ф-лы, 3 ил.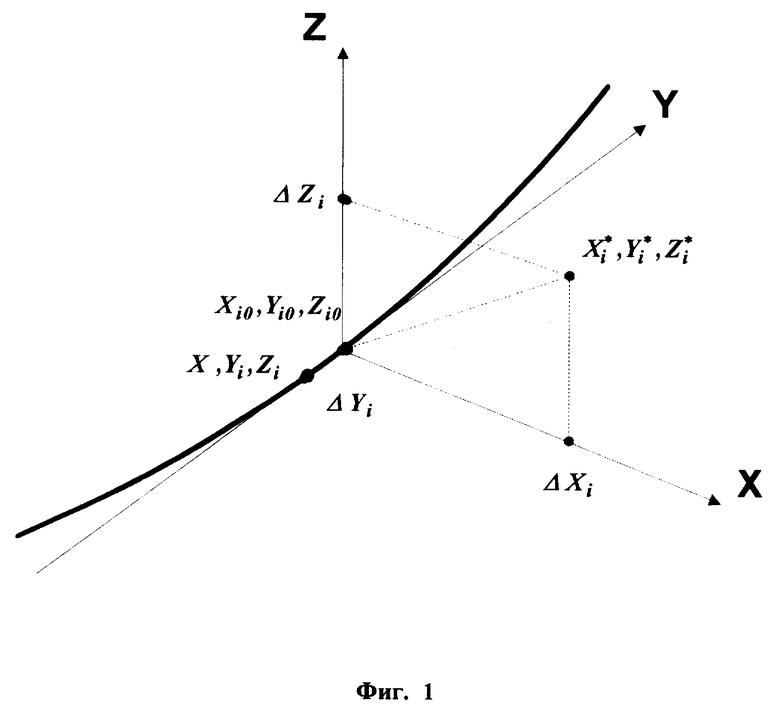
Δx = axxiΔxi+axyiΔyi+axziΔzi,
Δy = ayxiΔxi+ayyiΔyi+ayziΔzi,
Δz = azxiΔxi+azyiΔyi+azziΔzi,
где i = 1, n;
аxxi, аxyi, аxzi, аyxi, ayyi, ayzi, azxi, azyi, azzi - коэффициенты пересчета координат из специальной топоцентрической системы координат с центром в точке Xio, Yio, Zio, осями Xтi и Yтi, лежащими в горизонтальной плоскости, и осью Zтi, направленной вертикально вверх, причем точка xi*, yi*, zi* лежит в плоскости Xтi, Zтi, а касательная к известному маршруту лежит в плоскости Yтi, Zтi, в геоцентрическую систему координат;
Δxi = bxxi(xi - xio) + bxyi(yi - yio) + bxzi(zi - zio),
Δzi = bzxi(xi - xio) + bzyi(yi - yio) + bzzi(zi - zio),
bxxi, bxyi, bxzi, bzxi, bzyi, bzzi - коэффициенты пересчета координат из геометрической системы координат в специальную топоцентрическую систему координат с указанными характеристиками;
Δyi - n сопутствующих неизвестных;
Δx, Δy, Δz - определяемые поправки.
| Шебшаевич В.С | |||
| и др | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Радио и связь, 1993, с.163 - 182 | |||
| Гришин Ю.П | |||
| и др | |||
| Радиотехнические системы | |||
| - М.: Высшая школа, 1990, с.302 | |||
| US 4359733 A, 16.11.82 | |||
| DE 3517213 A1, 21.11.85 | |||
| СПОСОБ УПРАВЛЕНИЯ СВЯЗАННЫМИ ОБЪЕКТАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017660C1 |

