Предлагаемое изобретение относится к измерительным системам и может быть использовано для контроля положения подвижных железнодорожных составов.
Известна система контроля положения подвижных объектов, например подвижного железнодорожного состава по заявке N 62-44226 (Япония), в которой вдоль пути следования подвижного объекта развернута линия индуктивной радиосвязи, имеющая N (где N>3) проводников с периодом повторения P, расположенных со сдвигом P/N. На каждый проводник подают N-фазный электрический ток с прямой или обратной последовательностью фаз. Две транспортные антенны подвижного объекта, расположенные на некотором расстоянии друг от друга вдоль линии радиосвязи, принимают от нее сигналы. По сдвигу фаз принимаемых сигналов определяют положение объекта. В системе линия радиосвязи разделена на небольшие интервалы, соответствующие интервалам, на которые разделен весь путь следования объекта. На каждом интервале периоды повторения отличаются [1].
Недостатком системы является низкая точность определения подвижного состава.
Известна система контроля положения подвижных объектов, содержащая n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, аппаратуры потребителя (далее в материалах заявки названной навигационным приемником), вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок, подвижный объект, состоящий из последовательно соединенных первой приемной антенны, навигационного приемника и корректора, параметра, выход которого соединен с информационным входом навигационного приемника, последовательно соединенных второй приемной антенны, приемника и демодулятора, выход которого соединен со вторым входом корректора параметра [рис.20.3, 2].
Данная система обеспечивает определение координат и скорости движения состава в широкой зоне действия с высокой точностью.
Недостатком данной системы является отсутствие возможности определения положения подвижного состава в тоннелях с высокой точностью.
В основу изобретения положена задача повышения точности определения местоположения подвижного состава в тоннелях.
Поставленная задача решается тем, что в систему контроля положения подвижного железнодорожного состава, содержащую n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок, подвижный состав, состоящий из последовательно соединенных первой приемной антенны, навигационного приемника и корректора параметра, выход которого соединен со вторым входом навигационного приемника, последовательно соединенных второй приемной антенны, приемника и демодулятор, выход которого соединен со вторым входом корректора параметра, согласно изобретению в подвижный состав введены последовательно соединенные корректор скорости, вычислитель пути и вычислитель местоположения, датчик скорости, выход которого соединен с первым входом корректора скорости, блок памяти, выход которого соединен с вторым входом вычислителя местоположения, второй выход навигационного приемника соединен со вторым входом корректора скорости, третий выход навигационного приемника соединен со вторым входом вычислителя пути.
Преимущества предлагаемого технического решения заключаются в повышении точности определения местоположения подвижного состава за счет коррекции показаний датчика скорости локомотива и определения по пройденному пути в тоннеле местоположения состава.
Изобретение поясняется описанием конкретных примеров его осуществления и прилагаемыми чертежами, на которых: фиг. 1 изображает структурную схему системы контроля положения подвижного состава; фиг.2 - схему варианта вычислителя местоположения; фиг.3 - блок-схема алгоритма его работы.
Система содержит навигационные спутники 11 - 1n, контрольно-корректирующую станцию 2, состоящую из последовательно соединенных приемной антенны 3, навигационного приемника 4, вычислителя поправок 5, модулятора 6, передатчика 7 и передающей антенны 8, вычислителя параметра 9, соединенного со вторым входом вычислителя поправок 5, подвижный состав 10, состоящий из последовательно соединенных первой приемной антенны 11, навигационного приемника 12 и корректора параметра 13, выход которого соединен со вторым входом навигационного приемника 12, последовательно соединенных второй приемной антенны 14, приемника 15, и демодулятора 16, выход которого соединен со вторым входом корректора параметра 13, последовательно соединенных корректора скорости 17, вычислителя пути 18 и вычислителя местоположения 19, датчика скорости 20, выход которого соединен с первым входом корректора скорости 17, блока памяти 21, выход которого соединен с вторым входом вычислителя местоположения 19, второй и третий выходы навигационного приемника 12 соединены соответственно с вторыми входами корректора скорости 17 и вычислителя пути 18.
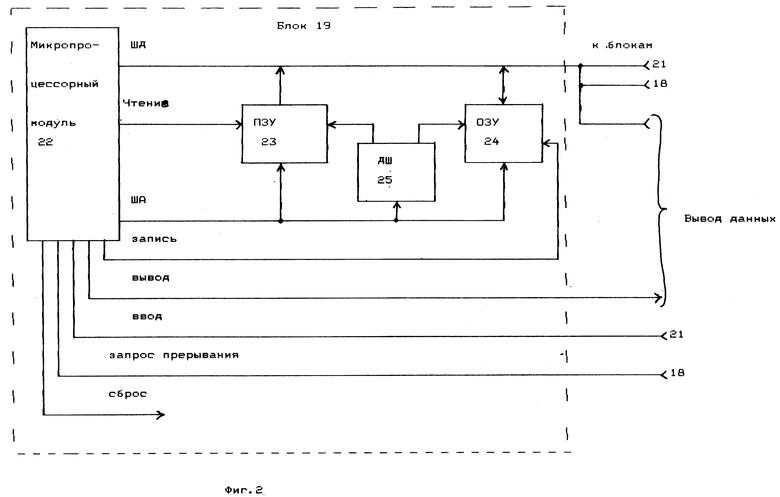
Вычислитель местоположения 19 содержит (фиг. 3) микропроцессорный модуль 22, шина данных (ШД) которого связана с постоянным запоминающим элементом 23, оперативным запоминающим элементом 24. Шина адреса (ША) микропроцессорного модуля 22 соединена с адресным входом постоянного 23 и оперативного 24 запоминающих элементов и дешифратора 25, выходы которого соединены с входами управления постоянного 23 и оперативного 24 запоминающих элементов. Выход микропроцессорного модуля 22 "чтение" соединен с входом постоянного запоминающего элемента 23, выход "запись" соединен с входом оперативного запоминающего элемента 24, выход "вывод" предназначен для вывода информации по шине ШД из микропроцессорного модуля 22 во внешние устройства, выходы "ввод" и "запрос прерывания" - для ввода информации по шине ШД от внешних устройств в микропроцессорный модуль 22.
Работает система следующим образом. На контрольно-корректирующей станции 2 (фиг.1) антенной 3 принимаются сигналы от навигационных спутников 11 - 1n, например системы "Навстар", которые обрабатываются в навигационном приемнике 4. С выхода навигационного приемника 4 сигналы, в которых содержится информация о времени приема навигационных сигналов, измеренных дальностях до соответствующих спутников 11-1n (r1, r2. . ...rn) поступают на вычислитель поправок 3. С выхода вычислителя параметра 9 в вычислитель поправок 3, вводится информация об эталонных дальностях (r'1, r'2,.....r'n) до соответствующих спутников 11-1n, которые определяются в вычислителе параметра 9 по известным координатам контрольно-корректирующей станции 2. Разности измеренных и расчетных значений дальностей (поправок к дальностям) Δr1, Δr2, Δrn поступают с выхода вычислителя поправок 5 на модулятор 6. В передатчике 7 преобразуются, усиливаются и антенной 8 излучаются сигналы, содержащие информацию о спутниках, необходимую для работы подвижного состава.
На подвижном составе 10 (фиг. 1) сигналы с контрольно-корректирующей станции 2 принимаются антенной 14, усиливаются и преобразуются в приемнике 15, а затем выделяются на выходе демодулятора 16 сигналы, содержащие информацию о принимаемых спутниках, в том числе поправки к дальностям. Данная информация вводится в корректор параметра 13. Антенной 11 принимаются сигналы от навигационных спутников 11-1n, которые обрабатываются в навигационном приемнике 12. С первого выхода навигационного приемника 12 сигналы, в которых содержится информация о времени приема навигационных сигналов, измеренных дальностях до соответствующих спутников 11-1n, (R1, R2.....Rn) поступают на второй вход корректора параметра 13. В корректоре параметра 13 по информации об измеренных дальностях (R1, R2....Rn) из навигационного приемника 12 и поправкам к дальностям (r1, r2...rn) из блока 16 вычисляются уточненные дальности от подвижного состава 10 до соответствующих спутников 11-1n (R'1, R'2..R'n), значения которых поступают в навигационный приемник 12. В навигационном приемнике 12 по информации, полученной с выхода корректора параметра 15 определяются с высокой точностью координаты, скорость подвижного состава 10.
С выхода датчика скорости 20, который фиксирует скорость движения VI локомотива по числу оборотов его колесной пары, сигнал поступает на первый вход корректора скорости 17. На второй вход корректора скорости 17 поступают данные о скорости движения состава V2 на основании измерения информационных параметров в навигационном приемнике 12. В корректоре скорости 17 определяется погрешность измерения скорости датчиком 20, т.е. ΔV = V1-V2, величина которой используется затем в корректоре скорости 17 для уточнений скорости движения Vc состава при отсутствии приема сигналов от навигационных спутников 11-1n, например в тоннелях т.е., Vc = V1-ΔV.
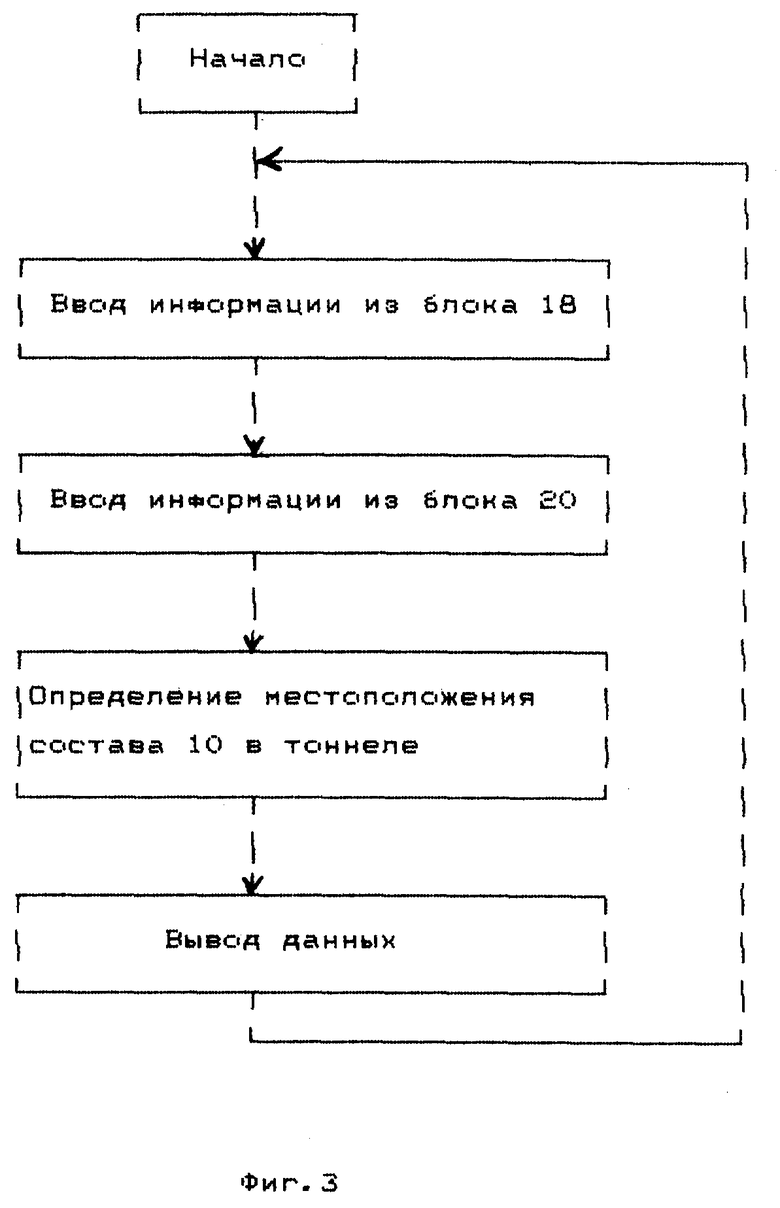
С выхода корректора скорости 17 информация о скорости Vc поступает на первый вход вычислителя пути 18. На второй вход вычислителя пути 18 поступают данные о текущем времени t от навигационного приемника 12, информация о моменте времени tc, когда нарушается прием сигналов от навигационных спутников 11-1n, например въезд железнодорожного состава в тоннель, а также данные о координатах подвижного состава 10 для данного момента времени tc. В вычислителе пути 18 по данным о скорости подвижного состава 10 (Vc) от блока 17 и данным о текущем времени t от блока 12 определяется пройденный составом путь от момента времени tc по формуле П = Vo•t. Информация о пройденном пути П и координатах подвижного состава 10 для времени tc поступает с выхода вычислителя пути 18 на первый вход вычислителя местоположения 19. На второй вход вычислителя местоположения 19 поступают данные от блока памяти 20. В блоке памяти 20 хранится информация о характере железнодорожного пути в тоннеле (радиус кривизны, уклон пути, длина тоннеля и т.д.). В вычислителе местоположения 19 по информации от блока 20 и от блока 18 определяется местоположение подвижного состава 10 в тоннеле, полученные данные выводятся из вычислителя местоположения 19 на индикацию для машиниста локомотива.
Алгоритмы расчета местоположения контрольно-корректирующей станции 2 и подвижного состава 10 по данным, полученным от навигационных спутников 11-1n приведены, например на с. 46, 220, [2], на с. 62 [3]. Алгоритмы расчета местоположения подвижного состава 10 с высокой точностью на основании информации, полученной на контрольно-корректирующей станции 2 и переданной на подвижной состав 10, приведены, например на с. 285-288 [2]. Алгоритмы расчета скорости движения подвижного состава 10 приведены на с. 223, 235 [2].
Вычислитель поправок 5, вычислитель параметра 9, корректор параметра 13, корректор скорости 17, вычислитель пути 18 и вычислитель местоположения 19 могут быть реализованы на элементах "жесткой" (непрограммируемой) логики, так и на основе микропроцессора по типовой структуре, описанной, например на с. 203 [4] . Функциональная схема вычислительного устройства с программным вводом/выводом данных приведена на рис. 10.8 [5] описана при реализации на микропроцессорном модуле 580 ИК 80.
Структурная схема варианта построения блоков 5, 9, 13, 17, 18, 19 приведена на фиг. 2, где показано, например подключение блоков 18 и 21 к входам блока 19. Дешифратор 25 обеспечивает выбор постоянного 23, или оперативного 24 запоминающих элементов, в которых хранятся программы, константы или текущая информация соответственно. Микропроцессорный модуль 22 выполняет обработку и обмен информацией в соответствии с блок-схемой (фиг.3) и связан с блоками 24-26 шиной адреса (ША) и информационной шиной данных (ШД), может иметь управляющие выходы с сигналами "чтение" и "запись" для управления постоянным 23 и оперативным 24 запоминающими элементами соответственно, "вывод" - например, для вывода информации по шине ШД из блока 19, вход "запрос прерывания" для ввода информации по шине ШД в блок 19 от блока 18, вход "ввод" для ввода информации в блок 19 от блока 21 по шине ШД.
При реализации блоков 5, 9, 13, 17, 18, 19 на базе микропроцессора K 580 микропроцессорный модуль 22 состоит из трех БИС-центрального процессора К580ИК80, системного контроллера К580ВК88, тактового генератора К580ГФ24.
Навигационные приемники 4, 12 могут быть выполнены в соответствии с рис. 1.14 [6] , рис. 38 [3], рис.9.5 [2], рис. 14.6, 14.7, 14.8, [7]. Реализации отдельных блоков аппаратуры, расположенной на контрольно-корректирующей станции 2 и подвижном составе 10 описаны, например в [2, 3, 5, 6].
Таким образом в предлагаемом изобретении повышается точность определения местоположения подвижного состава при движении в тоннелях путем уточнения скорости движения состава и определения пройденного пути от заданного момента времени и измеренного местоположения состава.
Литература
1. Заявка Японии N 62-44226.
2. Сетевые спутниковые радионавигационные системы. /Под. ред. В.С. Шебшаевича. 2-е изд., перераб. и доп. М.: Радио и связь, 1993.
3. Бортовые устройства спутниковой радионавигации. /Под. ред. В.С. Шебшаевича. М.: Транспорт, 1988.
4. Балашов Е. П. , Пузенков Д.В. Микропроцессоры и микропроцессорные системы. М.: Радио и связь, 1990.
5. Проектирование импульсных и цифровых устройств радиотехнических систем. /Под. ред. Ю.М. Казаринова. М.: Высшая школа, 1985.
6. Цифровые радиоприемные системы. /Под. ред. Жодзишского М.: Радио и связь, 1990.
7. Радиотехнические системы. /Под. ред. Ю.М. Казаринова, М.: Высшая школа, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| СИСТЕМА ДЛЯ СОЗДАНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2195408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ЖЕЛЕЗНОДОРОЖНЫХ ПОЕЗДОВ | 1997 |
|
RU2145423C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2004 |
|
RU2265543C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |
| УСТРОЙСТВО ОПОВЕЩЕНИЯ РЕМОНТНЫХ БРИГАД | 2003 |
|
RU2268836C2 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2002 |
|
RU2272731C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| НАВИГАЦИОННОЕ КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ЛОКОМОТИВОВ-РЕЛЬСОСМАЗЫВАТЕЛЕЙ | 2009 |
|
RU2394716C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 1996 |
|
RU2131132C1 |
Изобретение используется для контроля подвижного железнодорожного состава. Система содержит n навигационных спутников. Контрольно-корректирующая станция состоит из последовательно соединенных приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок. Подвижный состав состоит из последовательно соединенных первой приемной антенны, навигационного приемника и корректора параметра, последовательно соединенных второй приемной антенны, приемника и демодулятора. Выход корректора параметра соединен со вторым входом навигационного приемника. Выход демодулятора соединен со вторым входом корректора параметра. В подвижный состав введены последовательно соединенные корректор скорости, вычислитель пути и вычислитель местоположения, датчик скорости, блок памяти. Выход датчика скорости соединен с первым входом корректора скорости. Выход блока памяти соединен со вторым входом вычислителя местоположения. Второй выход навигационного приемника соединен со вторым входом корректора скорости. Третий выход навигационного приемника соединен со вторым входом вычислителя пути. Техническим результатом является повышение точности определения местоположение состава. 3 ил.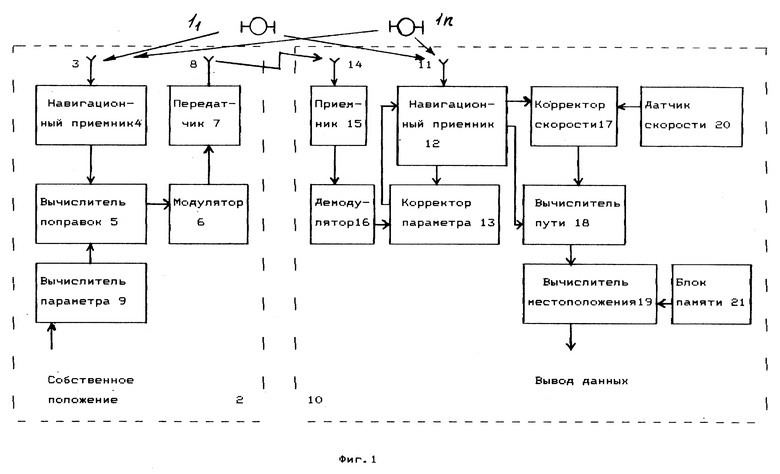
Система контроля положения подвижного железнодорожного состава, содержащая n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок, подвижный состав, состоящий из последовательно соединенных первой приемной антенны, навигационного приемника и корректора параметра, выход которого соединен со вторым входом навигационного приемника, последовательно соединенных второй приемной антенны, приемника и демодулятора, выход которого соединен со вторым входом корректора параметра, отличающаяся тем, что в подвижный состав введены последовательно соединенные корректор скорости, вычислитель пути и вычислитель местоположения, датчик скорости, выход которого соединен с первым входом корректора скорости, блок памяти, выход которого соединен с вторым входом вычислителя местоположения, второй выход навигационного приемника соединен со вторым входом корректора скорости, третий выход навигационного приемника соединен со вторым входом вычислителя пути.
| Сетевые спутниковые радионавигационные системы | |||
| /Под ред | |||
| Шебшаевича В.С | |||
| - М.: Радио и связь, 1993 | |||
| УСТРОЙСТВО ОБРАБОТКИ НАВИГАЦИОННОЙ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2012896C1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1992 |
|
RU2012897C1 |
| СПОСОБ ЗАПИСИ И СЧИТЫВАНИЯ ИНФОРМАЦИИ | 0 |
|
SU167683A1 |
| EP 379198 A2, 18.01.90 | |||
| АППАРАТ ДЛЯ НЕПРЕРЫВНОЙ ОБРАБОТКИ ТЕКСТИЛЬНЫХ НИТЕЙ ГАЗООБРАЗНЫМИ АГЕНТАМИ ПОД ДАВЛЕНИЕМ | 0 |
|
SU242115A1 |

