Изобретение относится к области радиолокации и может быть использовано для решения задачи обнаружения сигналов в условиях априорной неопределенности относительно шумового фона.
Известен способ обнаружения цели в РЛС, состоящий в формировании порога обнаружения с использованием сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке разрешения, и сравнении его с амплитудой сигнала, выделенного в анализируемой ячейке, причем, порог обнаружения определяют как произведение порогового множителя, величину которого задают исходя из заданной вероятности ложной тревоги, и оценки мощности шумовых сигналов, в качестве которой используют амплитуду сигнала, находящегося практически в середине последовательности, получаемой путем расстановки по возрастанию амплитуд сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке разрешения [1].
Данный способ можно использовать в условиях априорной неопределенности относительно параметров распределения амплитуд шумовых сигналов. При многоцелевой ситуации, когда в некоторых ячейках разрешения, окрестных анализируемой, выделена смесь шумовых и эхо-сигналов, данный способ позволяет получать несмещенную оценку мощности шума. В случае наличия в ячейках разрешения, окрестных анализируемой ячейке, эхо-сигналов других целей происходит следующее. При расстановке по возрастанию амплитуд сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке разрешения, амплитуды эхо-сигналов других целей оказываются на краю новой упорядоченной последовательности амплитуд. А поскольку в качестве оценки мощности шумовых сигналов используют амплитуду сигнала, находящегося практически в середине последовательности, то смещение оценки мощности шумовых сигналов будет столь незначительно, что снижение вероятности правильного обнаружения практически не наблюдается. Таким образом, данный способ обнаружения обладает устойчивостью в многоцелевых ситуациях. Однако для расстановки амплитуд по возрастанию требуются немалые временные затраты. Так, для расстановки по возрастанию N величин требуется N2 последовательных операций сравнения. При больших значениях N эти затраты могут быть весьма существенны и ограничивать применение способа.
Таким образом, недостатком данного способа являются большие временные затраты на его реализацию.
Наиболее близким к изобретению является способ обнаружения цели в РЛС, состоящий в формировании порога обнаружения с использованием сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке разрешения, и сравнении его с амплитудой сигнала, выделенного в анализируемой ячейке, причем, для формирования порога обнаружения делят ячейки разрешения, окрестные анализируемой ячейке, на несколько частей, формируют первичные упорядоченные последовательности, состоящие из расставленных в порядке возрастания амплитуд сигналов каждой части окрестных ячеек разрешения, выбирают из этих последовательностей определенные амплитуды сигналов, расставляют их по возрастанию, формируя при этом вторичную упорядоченную последовательность амплитуд, выбирают из этой последовательности определенное значение амплитуды и умножают его на пороговый множитель, величину которого задают исходя из заданной вероятности ложной тревоги [2].
При реализации данного способа обнаружения удается в несколько раз снизить временные затраты на его реализацию, т.к. процесс формирования первичных упорядоченных последовательностей осуществляется одновременно для всех частей окрестных ячеек. Тем не менее эти затраты все же высоки.
Целью предлагаемого изобретения является снижение временных затрат при реализации способа обнаружения цели в РЛС с использованием для формирования порога сигналов, выделенных в ячейках разрешения, окрестных анализируемой.
Для достижения этого в способе обнаружения цели в РЛС, состоящем в формировании порога обнаружения с использованием сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке разрешения, дополнительно амплитуды выборки сигналов, выделенных в N окрестных ячейках разрешения, смещают в T раз относительно амплитуды сигнала анализируемой ячейки, определяют ранг (R) амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно амплитуд смещенной выборки, сравнивают полученное значение R с пороговым значением Rп (Rп < N) и при R ≥ Rп принимают решение об обнаружении цели в анализируемой ячейке разрешения, причем, значения величин T и Rп определяют заранее исходя из заданной вероятности ложной тревоги F в соответствии с выражением
где 
вероятность ранга амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно амплитуд смещенной выборки амплитуд, при наличии в ячейках разрешения только шумовых сигналов, число сочетаний из N по R,
число сочетаний из N по R,
G(U)ш - функция распределения амплитуд сигналов, выделенных в ячейках разрешения, при наличии только шумовых сигналов;
G(U, T)ш - функция распределения амплитуд сигналов, выделенных в ячейках разрешения и смещенных в T раз, при наличии только шумовых сигналов.
Новыми признаками, обладающими существенными отличиями, являются.
1. Смещение в T раз каждой из амплитуд сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке.
2. Определение ранга амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно выборки амплитуд, смещенных в T раз, и сравнение этого ранга с пороговым значением, величина которого меньше размера выборки амплитуд сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке.
Данные признаки обладают существенными отличиями, т.к. в известных способах не обнаружены.
Применение всех новых признаков позволит снизить временные затраты при реализации способа обнаружения цели в РЛС с использованием для формирования порога обнаружения сигналов, выделенных в ячейках разрешения, окрестных анализируемой.
Из фиг. 1 приведен вариант схемы устройства для реализации предложенного способа. Устройство содержит следующие элементы: линию задержки (ЛЗ) с N+1 отводами, N умножителей (X), N+1 компараторов (K) и сумматор (Σ). Устройство содержит известные элементы и достаточно просто может быть выполнено как в аналоговом, так и в цифровом исполнении. Работа устройства заключается в следующем. Продетектированные сигналы поступают на вход линии задержки, имеющей N+1 отводов. Время задержки сигнала между двумя смежными отводами соответствует элементу (ячейке) разрешения по дальности. Задача обнаружения решается относительно сигнала, снимаемого с N/2 отвода, а сигналы, снимаемые с 1 по N/2-1 и с N/2+1 по N+1 отводов, образуют обучающую выборку. С помощью N умножителей осуществляется смещение амплитуд U1, ... UN/2-1, UN/2+1, ... UN+1 в T раз. С помощью N компараторов и сумматора производится подсчет числа превышений амплитудой сигнала UN/2, выделенного в анализируемой ячейке разрешения, амплитуд смещенной выборки TU1, TUn/2-1, TUN/2+1, ... TUN+1. Это число превышений и есть ранг R. На входы (N+1)-го компаратора поступают величина R и порог Rп. Если R ≥ Rп, то принимается решение об обнаружении цели в анализируемой ячейке разрешения.
Смещение выборки амплитуд U1, ... UN/2-1, UN/2+1, ... UN+1 в T раз относительно амплитуды UN/2 можно осуществить также и без использования N умножителей. При этом надо подать амплитуду UN/2 с выхода ЛЗ на делитель с коэффициентом деления T и после этого сравнивать значение UN/2/T с амплитудами U1, ... UN/2-1, UN/2+1, ... UN+1.
Выражение для P(R)ш можно получить из следующих рассуждений, приведенных в [3]. Пусть имеется N случайных независимых величин TU, имеющих функцию распределения G(U, T)ш и случайная величина U, имеющая функцию распределения G(U)ш. Вероятность того, что из N независимых величин R окажутся меньшими некоторого фиксированного значения U, а остальные (N - R) большими U, равна
Для случайного значения U вероятность такого события определяется усреднением этого выражения по распределению U, т.е. с весом dG(U)ш, что и приводит к
Величина порогового множителя T определяется итерационно при заданных величинах N, F, Rп и принятой модели шумовых сигналов. Пусть, например, N = 32, F = 10-4 и закон распределения амплитуд шумовых сигналов на входе схемы (фиг. 1) релеевский (нормальный до линейного детектирования с единичной дисперсией). Тогда G(U)ш = 1- exp(-0,5U2) [3], а G(U,T)ш = 1- exp(0,5U2/T2), и, соответственно,
Выбрав начальное значение T, решив интеграл (4) численным методом Симпсона для Rп ≤ R ≤ N и просуммировав полученные значения P(R)ш, получим расчетное значение величины ложной тревоги согласно (1). При несоответствии расчетного и заданного значений вероятности F надо повторить расчеты при измененном значении множителя T. Ниже приведены полученные значения T при соответствии расчетного и заданного значений вероятности F с точностью до шестого знака после запятой:
Rп 25 20 15
T 2,806 3,536 4,557
Величина правильного обнаружения D рассчитывается как
где  вероятность ранга амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно амплитуд смещенной выборки амплитуд, при наличии в ячейках разрешения, окрестных анализируемой, только шумовых сигналов, а в анализируемой ячейке - смеси полезного сигнала и шумового, G(U)с+ш - функция распределения амплитуд сигналов, выделенных в ячейках разрешения, при наличии смеси шумовых и полезных сигналов.
вероятность ранга амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно амплитуд смещенной выборки амплитуд, при наличии в ячейках разрешения, окрестных анализируемой, только шумовых сигналов, а в анализируемой ячейке - смеси полезного сигнала и шумового, G(U)с+ш - функция распределения амплитуд сигналов, выделенных в ячейках разрешения, при наличии смеси шумовых и полезных сигналов.
Пусть закон распределения смеси полезного сигнала и шума также релеевский, т.е. G(U)с+ш = 1 - exp[-0,5U2/(1+q2)], где q2 - отношение сигнал/шум по мощности [3]. Тогда
Подставив в интеграл расчетное значение T, решив интеграл (6) численным методом Симпсона для Rп ≤ R ≤ N и просуммировав полученные значения P(R)с+ш, получим расчетное значение величины правильного обнаружения согласно (5).
Для сравнения эффективности прототипа и предлагаемого способа произведем расчет вероятности правильного обнаружения прототипа при тех же значениях N, F и тех же моделях сигналов. Сделаем предварительные пояснения. Амплитуды сигналов, выделенных в окрестных ячейках разрешения, после их расстановки в порядке возрастания получают название порядковых статистик. Номер порядковой статистики, из которых образуются первичные и вторичная упорядоченные последовательности, называется рангом порядковой статистики [4].
Величина порогового множителя T для прототипа находится из решения интеграла, определяющего вероятность ложной тревоги, [4]
где  плотность вероятности порядковой статистики m, выбранной в качестве оценки мощности шума во вторичной упорядоченной последовательности амплитуд;
плотность вероятности порядковой статистики m, выбранной в качестве оценки мощности шума во вторичной упорядоченной последовательности амплитуд;
плотность вероятности порядковой статистики ранга k, выбранной из первичной упорядоченной последовательности для формирования вторичной упорядоченной последовательности амплитуд; g(U)ш - плотность вероятности амплитуд сигналов, выделенных в ячейках разрешения, при наличии только шумовых сигналов;
функция распределения порядковой статистики ранга k в первичной последовательности; M • K = N; вероятность P(UN/2 > UT)ш определяется как 1 - G(U, T)ш. Используя ранее принятые модели сигналов, а также то, что в данном случае G(U, T)ш = 1 - exp(-0,5U2T2) получим
Решая этот интеграл итерационно методом Симпсона при K = 8, M = 4, k = 6, m = 3, было получено значение порогового множителя для прототипа T = 3,055.
После нахождения множителя T можно рассчитать вероятность правильного обнаружения как
где P(UN/2 > UT)ш+с = 1 - G(U, T)ш+с.
Используя ранее принятые модели сигналов, а также то, что в данном случае G(U, T)ш = 1 - exp[-0,5U2T2/(1+q2)] получим
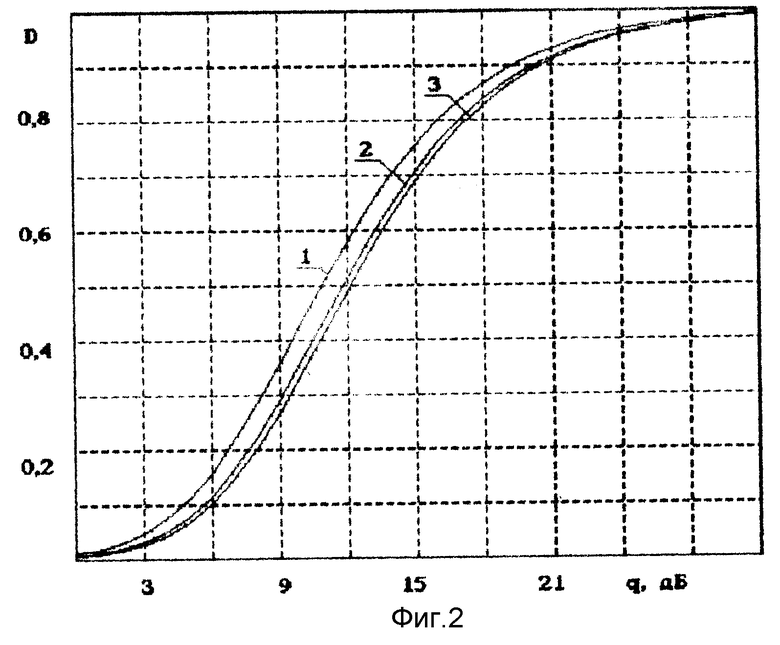
На фиг. 2 приведены рассчитанные вероятности правильного обнаружения для критерия Неймана-Пирсона (линия 1), предлагаемого способа (линия 2) при Rп = 25 и прототипа (линия 3). Расчет величины D обнаружителя Неймана-Пирсона осуществлялся согласно выражению D = 1 - G(Uп)ш+с = exp[-0,5Uп 2/(1+q2)], где Uп - постоянный порог, определяемый как (-2lnF)1/2 [5] при F = 10-4.
Из фиг. 2 видно, что характеристики обнаружения прототипа и предлагаемого способа практически совпадают. Несколько лучшие характеристики предлагаемого способа объясняются тем, что в процессе обнаружения участвуют все сигналы, выделенные в окрестных ячейках. Тогда, как в прототипе порог обнаружения формируется с учетом одной выбранной амплитуды сигнала, выделенного в одной из окрестных ячеек.
Для сравнения устойчивости прототипа и предлагаемого способа в многоцелевых ситуациях было проведено цифровое статистическое моделирование. Амплитуды сигналов моделировались в виде последовательности N+1 независимых чисел U, распределенных по закону Релея. Число, распределенное по закону Релея, моделируется как корень второй степени из суммы квадратов двух случайных независимых нормально распределенных чисел [6]. В данном случае случайные числа U для окрестных ячеек моделировались как U = [(q1U1 + U2)2 + (q1U3 + U4)2] 1/2, где U1, U2, U3, U4 - независимые нормально распределенные числа с нулевым математическим ожиданием и единичной дисперсией; q1 - отношение сигнал/шум по напряжению для тех окрестных ячеек, в которых моделировалось наличие эхо-сигналов других целей, для остальных ячеек q1 = 0. А случайное число U для анализируемой ячейки разрешения моделировалось как U = [(qU1 + U2)2 + (qU3 + U4)2]1/2.
Числа U1, U2, U3, U4 моделировались согласно выражениям [6]
U1= (-2lnξ1)1/2sin(2πξ2), U3= (-2lnξ3)1/2sin(2πξ4),
U2= (-2lnξ5)1/2sin(2πξ6), U4= (-2lnξ7)1/2sin(2πξ8).
где ξ1...ξ8 - равномерно распределенные на интервале (0...1) числа.
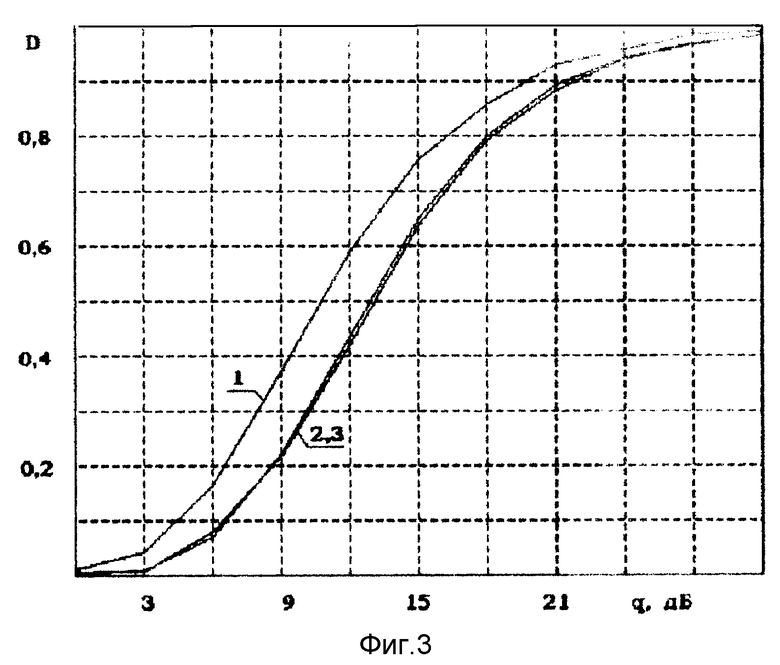
На фиг. 3 приведены полученные в ходе моделирования вероятности правильного обнаружения для критерия Неймана-Пирсона (линия 1), а также предлагаемого способа при Rп (линия 2) и прототипа (линия 3) при наличии в окрестных ячейках разрешения трех эхо-сигналов других целей при q1 = 20 дБ. Для каждого значения q проводилось 1000 циклов моделирования. Из фиг. 3 видно, что эффективность предлагаемого способа и прототипа при наличии в окрестных ячейках мешающих сигналов ухудшилась одинаково.
Сравним временные затраты при реализации прототипа и предлагаемого способа. Для прототипа эти затраты определяются в основном количеством сравнений, необходимых для расстановки амплитуд исходной выборки по возрастанию. При формировании первой упорядоченной последовательности амплитуд требуется (K(K-k+1) сравнений, т.к. находить порядковые статистики, ранг которых менее k, нет необходимости. Аналогично, при расстановке амплитуд вторичной упорядоченной последовательности амплитуд требуется M(M-m+1) сравнений. Итого в прототипе для принятых выше условий количество операций сравнения составляет K(K-k+1) + M(M-m+1) = 8(8-6+1) + 4(4-3+1) = 32. Дополнительно к этим операциям добавим еще операцию умножения порядковой статистики ранга m вторичной последовательности на пороговый множитель T и операцию сравнения этого произведения и амплитуды UN/2. Итого получается 34 операции. Кроме этого необходимы операции по формированию упорядоченных последовательностей.
При реализации предлагаемого способа требуется одна операция умножения (N операций умножения выполняются одновременно) или деления, две операции сравнения (N операций сравнения выполняются также одновременно) и одна операция сложения. Итого четыре операции. Причем, количество операций не зависит от количества окрестных ячеек разрешения.
Таким образом, применение предлагаемого изобретения позволит существенно (для рассмотренного примера в 9 раз) снизить временные затраты при реализации способа обнаружения цели в РЛС с использованием для формирования порога обнаружения сигналов, выделенных в ячейках разрешения, окрестных анализируемой.
Источники информации
1. DE 3213430. /WILA AUSZUGE AUS DEN OFFENLEGUNSSCHRIFTEN. - 1983. - N 42. (аналог)
2. DE 3223566. /WILA AUSZUGE AUS DEN OFFENLEGUNSSCHRIFTEN. - 1983. - N 52. (прототип)
3. Обнаружение радиосигналов /Под ред. А.А. Колосова. - Радио и связь, 1989. (с. 175 (выражение (8.33)), с. 177 (выражения (8.39), (8.41))
4. Rohling H. //IEEE Transactions on Aerospace and Electronic Systems, Vol. AES 19,4, July, 1983. - С. 608...621.
5. Теоретические основы радиолокации. /Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970. (с. 161, выражение (7))
6. Быков В.В. Цифровое моделирование в статистической радиотехнике. - М. : Сов. радио, 1971. (с. 25, выражение (1.9) и (1.10))
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ВЕРТОЛЕТА С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА | 2003 |
|
RU2260815C2 |
| ВЫЧИСЛИТЕЛЬ РАНГОВОЙ СТАТИСТИКИ | 1997 |
|
RU2121711C1 |
| ВЫЧИСЛИТЕЛЬ РАНГОВОЙ СТАТИСТИКИ | 1997 |
|
RU2122746C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| РАНГОВЫЙ АДАПТИВНЫЙ ПОСЛЕДОВАТЕЛЬНЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1996 |
|
RU2100822C1 |
| ВЫЧИСЛИТЕЛЬ РАНГОВОЙ СТАТИСТИКИ | 1997 |
|
RU2121710C1 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕКОГЕРЕНТНОЙ ПАЧКИ СИГНАЛОВ С ПОСТОЯННЫМ УРОВНЕМ ЛОЖНЫХ ТРЕВОГ | 2008 |
|
RU2391681C1 |
| УСТРОЙСТВО ДЛЯ РАНГОВОЙ ОБРАБОТКИ ДИСКРЕТНО-АНАЛОГОВЫХ СИГНАЛОВ | 1992 |
|
RU2129302C1 |
Изобретение относится к области радиолокации и может быть использовано для решения задачи обнаружения сигналов при стабилизированном уровне ложной тревоги. Способ обнаружения заключается в том, что амплитуды выборки сигналов, выделенных в N ячейках разрешения, окрестных анализируемой ячейке, смещают в Т раз относительно амплитуды сигнала, выделенного в анализируемой ячейке, определяют ранг амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно смещенных амплитуд выборки, полученное значение ранга сравнивается с пороговой величиной, которая вместе с величиной Т определяется исходя из заданного уровня ложной тревоги, операции смещения и сравнения выполняются одновременно для всех амплитуд сигналов, выделенных в этих ячейках, что позволяет снизить временные затраты и является достигаемым техническим результатом. 3 ил.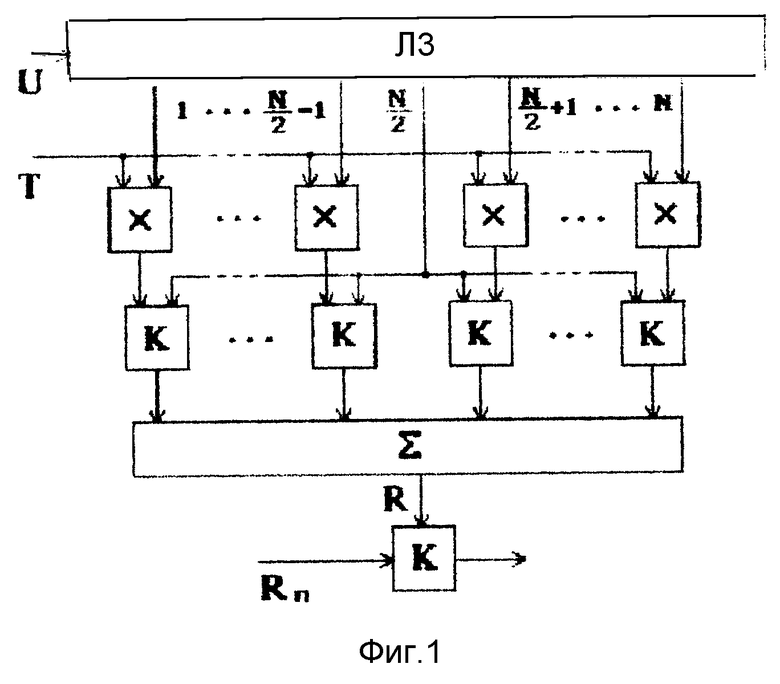
Способ обнаружения цели в РЛС, состоящий в формировании порога обнаружения с использованием сигналов, выделенных в ячейках разрешения, окрестных анализируемой ячейке разрешения, отличающийся тем, что амплитуды выборки сигналов, выделенных в N окрестных ячейках разрешения, смещают в Т раз относительно амплитуды сигнала анализируемой ячейки, определяют ранг (R) амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно амплитуд смещенной выборки, сравнивают полученное значение R с пороговым значением Rп(Rп < N) и при R ≥ Rп принимают решение об обнаружении цели в анализируемой ячейке разрешения, причем значения величин Т и Rп определяют заранее, исходя из заданной вероятности ложной тревоги F в соответствии с выражением
где
вероятность ранга амплитуды сигнала, выделенного в анализируемой ячейке разрешения, относительно амплитуд смещенной выборки амплитуд, при наличии в ячейках разрешения только шумовых сигналов; число сочетания из N по R;
число сочетания из N по R;
G(U)ш - функция распределения амплитуд сигналов, выделенных в ячейках разрешения, при наличии только шумовых сигналов;
G(U, Т)ш - функция распределения амплитуд сигналов, выделенных в ячейках разрешения и смещенных в Т раз, при наличии только шумовых сигналов.
| DE 3223566, 1983 | |||
| ЦИФРОВОЙ АДАПТИВНЫЙ ОБНАРУЖИТЕЛЬ | 1993 |
|
RU2048681C1 |
| RU 2053522 C1, 27.01.96 | |||
| US 48889159 A, 28.04.87 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ВОССТАНОВЛЕНИЯ ОКИСЛОВ НА ЖЕЛЕЗНЫХ ЛИСТАХ, ПРОВОДИМЫХ ЧЕРЕЗ ЛУДИЛЬНЫЙ АППАРАТ | 1933 |
|
SU36751A1 |
| US 4661816 A, 28.04.87. | |||

