Предлагаемое изобретение относится к области радиолокации и может быть использовано для решения задачи обнаружения вертолета на фоне подстилающей поверхности.
Известна импульсно-доплеровская радиолокационная станция для распознавания вертолетов [1]. Приемник, входящий в ее состав, обеспечивает прием отраженных импульсов, выделение группы частот в пределах определенного спектрального диапазона и удаление из этой группы спектральной составляющей, имеющей максимальную амплитуду. Оставшиеся спектральные составляющие, амплитуды которых превысили уровень порога, поступают в аккумулятор, который формирует сочетания амплитуд для последующего их сравнения с пороговым уровнем и принятия решения о наличии вертолета.
При облучении вертолета возникают отражения как от фюзеляжа, так и от вращающихся лопастей. Причем эхосигнал фюзеляжа вертолета ничем не отличается от эхосигналов других воздушных объектов, а эхосигнал вращающихся лопастей вертолета имеет по сравнению с ними более широкий спектр. С другой стороны, амплитуда эхосигнала фюзеляжа вертолета в определенных условиях превышает уровень эхосигнала вращающихся лопастей вертолета. Поэтому амплитуду эхосигнала фюзеляжа исключают из дальнейшей обработки. Признаком распознавания вертолета является обнаружение нескольких смежных спектральных составляющих эхосигнала в спектральном диапазоне, соответствующем спектру эхосигнала вращающихся лопастей. Таким образом, известную импульсно-доплеровскую радиолокационную станцию можно использовать для распознавания вертолетов.
Однако на фоне подстилающей поверхности становится затруднительно осуществлять распознавание вертолета, имеющего незначительную радиальную скорость из-за того, что возможно перекрытие спектров сигналов, отраженных от вращающихся лопастей вертолета и от фрагментов подстилающей поверхности.
Таким образом, недостатком данной импульсно-доплеровской радиолокационной станции являются низкие возможности по распознаванию вертолетов на фоне подстилающей поверхности.
Известен способ обнаружения и распознавания вертолета с использованием радиолокатора, заключающийся в анализе ширины полосы амплитудно-частотного спектра эхосигнала вращающейся лопасти вертолета, выделенного в нескольких смежных доплеровских фильтрах, причем обнаружение отдельных составляющих амплитудно-частотного спектра этого сигнала осуществляется путем сравнения амплитуд, выделенных на выходах доплеровских фильтров, с установленным порогом [2].
При реализации данного способа обнаружения и распознавания учитывается, что ширина полосы амплитудно-частотного спектра эхосигнала вращающейся несущей лопасти вертолета значительно превышает ширину полосы амплитудно-частотного спектра эхосигнала воздушных объектов (самолета, ракеты, фюзеляжа вертолета и др.). Это различие и позволяет обнаруживать вертолеты. Однако при наблюдении вертолета с помощью бортового радиолокатора на фоне отражений от подстилающей поверхности спектр эхосигнала вращающейся лопасти может сливаться со спектром отражений от этой подстилающей поверхности. В этом случае становится невозможно определить ширину полосы амплитудно-частотного спектра эхосигнала вращающейся лопасти вертолета и, соответственно, обнаружить и распознать его.
Целью предлагаемого изобретения является повышение возможностей по обнаружению и распознаванию вертолета на фоне подстилающей поверхности с помощью бортового радиолокатора.
Для достижения этой цели в способе обнаружения и распознавания вертолета с использованием радиолокатора, заключающемся в анализе ширины полосы амплитудно-частотного спектра эхосигнала вращающейся лопасти вертолета, выделенного в нескольких смежных доплеровских фильтрах, дополнительно обнаружение отдельной спектральной составляющей эхосигнала вращающейся лопасти вертолета происходит, если Rm,j - ранг ее амплитуды, выделенной на выходе m-ого доплеровского фильтра (m=1...М) в j-ом временном интервале зондирования (j=1...N+1) заданной области пространства и уменьшенной в Т раз, определенный относительно амплитуд, выделенных на выходе этого же доплеровского фильтра в N смежных временных интервалах зондирования этой же области пространства, будет не менее установленного порога Rth, а принятие решения о распознавании вертолета будет в том случае, если Sj - сумма (количество) спектральных составляющих, обнаруженных в «окне» из М смежных доплеровских фильтров в j-ом временном интервале зондирования заданной области пространства, будет не менее установленного порога Sth, причем число временных интервалов зондирования заданной области пространства N+1 может быть не более, чем частное от деления периода появления эхосигнала вращающейся лопасти вертолета Тn на длительность этого сигнала τ0, а значение величины Т при выбранных значениях N, М, Sth и Rth определяют заранее, исходя из заданной вероятности ложного обнаружения и распознавания вертолета F в соответствии с выражением

где  - число сочетаний из М по Sj;
- число сочетаний из М по Sj;
 - вероятность ложного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета в j-ом временном интервале зондирования заданной области пространства;
- вероятность ложного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета в j-ом временном интервале зондирования заданной области пространства;

вероятность распределения ранга Rm,j при наличии на выходе доплеровского фильтра только шумовых сигналов;
 - число сочетаний из N по Rm,j;
- число сочетаний из N по Rm,j;

Um,j - анализируемая амплитуда, выделенная на выходе m-го доплеровского фильтра в j-ом временном интервале зондирования заданной области пространства; Um,i - амплитуды, выделенные на выходе m-го доплеровского фильтра в смежных временных интервалах зондирования заданной области пространства; W(U)n - интегральная функция распределения амплитуд, выделенных на выходах доплеровских фильтров при наличии только шумов; W(U,T)n - интегральная функция распределения уменьшенных в Т раз амплитуд, выделенных на выходах доплеровских фильтров при наличии только шумов.
Новыми признаками, обладающими существенными отличиями, являются
1. Обнаружение отдельной спектральной составляющей эхосигнала вращающейся лопасти вертолета, выделенной в доплеровском фильтре в том временной интервале зондирования заданной области пространства, относительно которого проверяется гипотеза о наличии эхосигнала лопасти вертолета, осуществляется на фоне шумовых сигналов, выделенных в том же доплеровском фильтре в смежных временных интервалах зондирования этой области пространства.
2. В качестве решающей статистики обнаружения отдельной спектральной составляющей эхосигнала вращающейся лопасти вертолета используется ранг ее амплитуды, выделенной в анализируемом доплеровском фильтре и уменьшенной в Т раз, рассчитанный относительно выборки амплитуд, выделенных в этом же доплеровском фильтре в смежных временных интервалах зондирования заданной области пространства.
Данные признаки обладают существенными отличиями, т.к. в известных способах не обнаружены.
Применение всех новых признаков позволит обнаруживать и распознавать вертолет на фоне подстилающей поверхности при использовании выборок амплитуд сигналов, выделенных в смежных доплеровских фильтрах в смежных временных интервалах зондирования заданной области пространства. Использование для обнаружения составляющих эхосигнала вращающейся лопасти рангового критерия, не требующего априорных данных о параметре распределения шумового фона, позволит стабилизировать вероятность ложного обнаружения и распознавания вертолета F. Применение рангового критерия также обеспечит устойчивость обнаружения при наличии каких-либо случайных внешних помеховых сигналов.
На фиг.1 приведен вариант схемы устройства для реализации предложенного способа. Устройство содержит следующие элементы: (N+1) групп, каждая из которых содержит М регистров (Рг1...Ргм); (N+2)-ю группу из (N+1) регистров (Pr1...PrN+1); (N+2) мультиплексоров (М1...МN+2); умножитель (х); две группы, каждая из которых содержит (М+1) компараторов (К1...КN+1); сумматор (∑); компаратор (К); демультиплексор (ДМ); (N+3) двоичных счетчиков (Сч1...СчN+3); (N+1) индикаторов, например электрических лампочек.
Прежде чем рассмотреть работу устройства, рассмотрим структуру сигналов, наблюдаемых бортовым радиолокатором при обнаружении вертолета. При наблюдении цели на фоне подстилающей поверхности наряду с полезными эхосигналами будут также присутствовать и отражения от пассивных помех. Причем максимальная интенсивность пассивных помех будет соответствовать отражениям, поступающим по главному лепестку диаграммы направленности радиолокатора. Ширина амплитудно-частотного спектра пассивных помех будет определяться как [3]

относительно несущей частоты зондирующего сигнала, где Vr - путевая скорость перемещения радиолокатора, λ - длина волны зондирующего сигнала. Амплитудно-частотный спектр этих отражений показан на фиг 2. Пусть, например, λ=0,03 м и Vr=600 м/с. Тогда ширина этого спектра будет ±Fd≈±40 кГц относительно несущей частоты зондирующего сигнала fo.
Согласно [4] результирующий эхосигнал несущей лопасти вертолета представляет собой псевдослучайные колебания, спектр которых ограничен полосой частот относительно доплеровской частоты эхосигнала фюзеляжа вертолета. Значение этой полосы частот определяется как [4]

где k=2π/λ - волновое число; r - максимальное расстояние источника вторичного излучения несущей лопасти вертолета; Fl=n/60 - частота вращения несущей лопасти; n - скорость вращения несущей лопасти. При типовых значения n=192 об/мин, r≈10,5 м (см. табл.1 в [4]) и λ=0,03 м получим ±fdmax=±14 кГц относительно доплеровской частоты эхосигнала фюзеляжа вертолета. Причем справа (в области положительных доплеровских частот) будет находиться амплитудно-частотный спектр от приближающейся несущей лопасти вертолета, а слева, соответственно, от удаляющейся несущей лопасти вертолета.
На фиг.2 показано примерное положение амплитудно-частотных спектров пассивных помех, эхосигналов фюзеляжа и удаляющейся и приближающейся несущей лопасти вертолета. При обнаружении неподвижного вертолета спектр эхосигнала фюзеляжа будет находиться в области спектра пассивных помех, принимаемых главным лучом диаграммы направленности антенны радиолокатор. При движении вертолета спектр эхосигнала фюзеляжа будет смещаться вправо или влево. Это смещение, учитывая большую разницу в скорости вертолета и самолета, будет незначительным.
Таким образом, обнаружение вертолета на фоне подстилающей поверхности можно осуществить за счет обнаружения эхосигнала приближающейся несущей лопасти вертолета. При этом следует учесть, что эхосигнал несущей лопасти вертолета будет появляться с периодичностью, равной [4]

где z - число лопастей. Форма этого сигнала близка к виду sinX/X, а его длительность по первым нулям будет определяться как

За один период Тn можно решить задачу проверки гипотезы о наличии вертолета в облучаемой в этом периоде области пространства. В следующем периоде Тn можно перейти к зондированию другой области пространства и проверки гипотезы о наличии вертолета в ней и так далее.
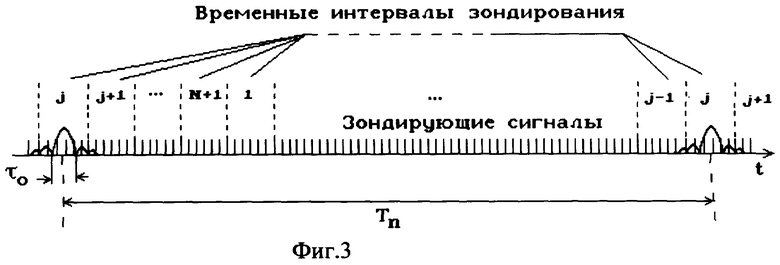
На фиг.3, где приведены огибающие зондирующих сигналов и эхосигнал несущей лопасти вертолета, поясняется разбиение периода Тn на временные интервалы зондирования равной ширины. В одном из них может находиться эхосигнал несущей лопасти вертолета, а остальные интервалы образуют фон, который используется для проверки рангового критерия при обнаружении отдельной спектральной составляющей эхосигнала вращающейся лопасти вертолета. Ширина временного интервала зондирования должна быть такой, чтобы на нем мог находиться не только основной лепесток эхосигнала длительностью τ0, но и ближние боковые лепестки, что позволит исключить ложное обнаружение в смежных временных интервалах. Пусть, например, временной интервал зондирования составляет 2τ0, то есть на нем может уместиться основной и два первых боковых лепестка эхосигнала несущей лопасти вертолета. Тогда из (5) и (6) можно определить наибольшее значение N как

При принятых ранее значениях k, r и z=5 получим N≈220.
Работа устройства заключается в следующем. Синхронизация работы отдельных элементов схемы осуществляется последовательностями импульсов C1, С2 и С3. Временные диаграммы этих последовательностей приведены на фиг.4. Продетектированные сигналы, выделенные на выходах доплеровских фильтров в предыдущем периоде Тn зондирования заданной области пространства, поступают для хранения на входы (N+1)-ой групп регистров Рг1...Ргм. Причем в первой группе регистров Рг1...Ргм хранятся сигналы, выделенные на выходах М смежных фильтров в первом временном интервале зондирования, во второй группе регистров Рг1...Ргм хранятся сигналы, выделенные на выходах этих же М смежных фильтров во втором временном интервале зондирования и т.д., и в (N+1)-й группе регистров Рг1...Ргм хранятся сигналы, выделенные на выходах этих же М смежных фильтров в (N+1)-м временном интервале зондирования заданной области пространства. На фиг.5 приведен типичный амплитудный рельеф спектра эхосигналов при наблюдении вертолета на фоне подстилающей поверхности. С помощью мультиплексоров M1...MN+1 амплитуды сигналов, хранящиеся в (М+1)-ой группах регистров Рг1...Ргм, записываются в (N+2)-ю группу регистров Рг1...РгN+1. Работой мультиплексоров М1...МN+1 управляет счетчик СчN+3. Данный счетчик устанавливается в ноль импульсом C1, а счет ведет по импульсам С2. За временной интервал импульса C1 на счетный вход счетчика СчN+3 поступает М импульсов С2. За это время мультиплексоры М1...МN+1 поочередно подключают к входам (N+2)-й группы регистров Рг1...РгN+1 одноименные выходы (N+1)-ой групп регистров Рг1...Ргм. Так, в m-ом периоде импульса С2 в (N+2)-ю группу регистров Рг1...РгN+1 будут записаны амплитуды, выделенные в m-ом доплеровском фильтре в (N+1)-ом смежных временных интервалах зондирования.
Счетчик СчN+2 устанавливается в нуль импульсом С2 и подсчитывает импульсы С3. За период импульса С2 на счетный вход счетчика СчN+2 поступает (N+1) импульсов С3. С поступлением каждого импульса С3 осуществляется определение ранга амплитуды, выделенной на выходе m-го доплеровского фильтра относительно амплитуд, выделенных на выходе этого же доплеровского фильтра в смежных временных интервалах зондирования. Это осуществляется с помощью первой группы компараторов К1...KN+1 и сумматора Σ следующим образом. Пусть в j-ом периоде импульса С3 m-го периода импульса С2 определяется ранг Rm,j. При этом амплитуда Um,j, выбираемая с помощью мультиплексора МN+2 с выхода j-го регистра (N+2)-й группы регистров и уменьшенная в Т раз, сравнивается одновременно со всеми амплитудами Um,1...Um,N+1 хранящимися в (N+2)-й группе регистров Рг1...РгN+1 в m-ом периоде импульса С2. Вычисление ранга, то есть подсчет числа случаев, когда выполняется условие Um,j/T≥Um,i (i=1...(N+1)), осуществляется на сумматоре Σ. Если значение вычисленного ранга Rm,j оказывается не менее установленного порога Rth, то на выходе компаратора К появится сигнал логической единицы. В противном случае на выходе компаратора К появится сигнал логического нуля. Сигнал логической единицы является решением об обнаружении одной спектральной составляющей эхосигнала вращающейся лопасти вертолета. Сигнал с выхода компаратора К через демультиплексор ДМ будет подаваться на счетный вход j-го двоичного счетчика Счj. Таким образом, за период импульса С2 значения счетчиков Сч1...СчN+1 могут увеличиться на единицу, если в соответствующем временном интервале зондирования произойдет обнаружение спектральной составляющей эхосигнала вращающейся лопасти вертолета, выделенной на выходе одного из доплеровских фильтров. За период импульса C1 на счетчиках Сч1...СчN+1 будут накоплены суммы спектральных составляющих, обнаруженных в «окне» из М смежных доплеровских фильтров в каждом временном интервале зондирования заданной области пространства. С помощью второй группы компараторов K1...KN+1 сравнивается каждая полученная сумма Sj с пороговым значением Sth. Если какая-либо из сумм окажется не менее порогового значения, то есть Sj≥Sth, то на выходе соответствующего компаратора появится сигнал логической единицы, что и будет являться сигналом об обнаружении вертолета. Визуально об этом будет сигнализировать соответствующий индикатор. С поступлением очередного импульса C1 счетчики Сч1...СчN+1 будут обнулены и схема будет готова к анализу результатов обзора другой области пространства.
Выражение (1) для величины F получено в соответствии с теоремой Бернулли.
Выражение (2) для Р(Rm,j)n можно получить из следующих рассуждений. Пусть имеется N+1 случайных независимых величин Um,i, i=1...N+1, имеющих интегральную функцию распределения W(U)n, и случайная величина Y=Um,j/T, имеющая интегральную функцию распределения W(U,T)n. Вероятность того, что из N независимых величин Rm,j окажутся меньшими некоторого фиксированного значения Y, а остальные N-Rm,j большими Y, равна [5]

Для случайного значения Um,i=Y вероятность такого события определяется усреднением выражения (8) по распределению значений Um,i, т.е. с весом dW(U,T)n, что и приводит к выражению для P(Pm,j)n.
Величина порогового множителя Т определяется подбором при заданных значениях F, N, М, Sth и Rth и принятой модели шумовых сигналов. Пусть, например, закон распределения продетектированных амплитуд шумовых сигналов на входе схемы (фиг.1) релеевский (нормальный до линейного детектирования с единичной дисперсией). Тогда в соответствии с [5]

Выбрав начальное значение Т при заданных значениях N, М, Sth и Rth и решив уравнение (1), получим расчетное значение величины F. Причем интеграл (2) можно решить численно, например, методом Симпсона. При несоответствии расчетного и заданного значений вероятности ложного обнаружения F надо повторить расчеты при измененном значении множителя Т. В табл.1 приведены полученные значения Т для заданных значений F=10-5, М=10, Sth=7 при соответствии расчетного и заданного значений вероятности F с точностью до шестого знака после запятой.
Величина правильного обнаружения и распознавания D по аналогии с выражением (1) рассчитывается как

где  - вероятность правильного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета;
- вероятность правильного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета;

вероятность распределения ранга Rm,j при наличии на выходе доплеровского фильтра смеси шумовых и полезного сигналов;
W(U,T)n+s - интегральная функция распределения уменьшенных в Т раз амплитуд, выделенных на выходах доплеровских фильтров при наличии шума и полезного сигнала.
Эффективность предлагаемого способа обнаружения и распознавания с использованием ранговых процедур сравним с эффективностью способа, при котором обнаружение отдельной спектральной составляющей эхосигнала вращающейся лопасти вертолета осуществляется путем сравнения ее амплитуды с уровнем порога, который выбирается при условии априорно известной дисперсии шумовых сигналов. При этом значение величины F определяется как и в предлагаемом методе согласно выражению (1). Вероятность ложного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета при принятой модели шумовых сигналов (9) будет определяться как
где Uth - пороговое напряжение. Значение Uth определяется подбором при заданных значениях N, М и Sth при решении уравнения (1) так, чтобы рассчитанное значение величины ложного обнаружения было равно с определенной точностью заданному значению. Вероятность правильного обнаружения и распознавания D будет определяться согласно (10). Для расчета величины D0 примем, что закон распределения смеси полезного сигнала и шума также релеевский, т.е.

где q - отношение сигнал/шум по мощности [5]. Тогда вероятность правильного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета будет определяться как
При расчете величины D0 в предлагаемом способе примем, что закон распределения уменьшенных в Т раз амплитуд смеси полезного сигнала и шума также релеевский, т.е.

На фиг.6 приведены полученные согласно (10) вероятности правильного обнаружения для F=10-5 при использовании способа, при котором обнаружение отдельной спектральной составляющей эхосигнала вращающейся лопасти вертолета осуществляется путем сравнения ее амплитуды с уровнем порога Uth (линия 1 - при Uth=2,139 при σ2=1, что обеспечивает F0=0,1015), а также предлагаемого способа (линия 2 - при N=60 и Rth=2; линия 3 - при N=40 и Rth=36; линия 4 - при N=20 и Rth=17; линия 5 - при N=10 и Rth=7).
Сравнение значений D показывает, что эффективность предложенного способа при N=60 практически достигает эффективности способа обнаружения, использующего полную априорную информацию относительно распределения шумового фона.
Таким образом, применение предлагаемого изобретения позволит осуществлять обнаружение вертолета с использованием радиолокатора на фоне подстилающей поверхности по эхосигналу приближающейся несущей лопасти. При этом для реализации предлагаемого способа обнаружения не требуется априорных знаний о параметрах распределения шумового фона.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент №5070335./ OFFICIAL GAZETTE - 1991, T.1133 №1 (аналог). Российская публикация в РЖ ИСМ, 1993, №13, с.38.
2. Патент №2683325./ BULLETIN OFFICIAL DE LA PROPRIETE INDUSTRIELLE. - 1993, №18 (прототип). Российская публикация в РЖ ИСМ 85-07-94.
3. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. - М.: Радио и связь, 1986 (с.245 - выражение (10.3), с.256 - рис.10.11, рис.10.12).
4. Гандурин В.А., Милонов Г.А. Модель радиолокационного сигнала, отраженного от вертолета // Радиотехника. - 2001. - №8. -(с.83 - табл.1, с.84 - выражение (5), с.86 - выражения для Тn, fd max и τ0).
5. Обнаружение радиосигналов / Под ред. А.А.Колосова. - Радио и связь, 1989 (с.175 - выражение (8.33, 8.34), с.177 - выражения (8.39), (8.41))


Изобретение относится к области радиолокации и может быть использовано для решения задачи обнаружения и распознавания вертолета на фоне подстилающей поверхности при стабилизированном уровне ложной тревоги. Обнаружение и распознавание вертолета осуществляется в два этапа. Сначала производится обнаружение отдельных спектральных составляющих эхосигнала вращающейся лопасти вертолета с использованием рангового критерия. Причем перед определением рангов этих составляющих их амплитуды предварительно уменьшаются в Т раз относительно выборок амплитуд, получаемых в смежных временных интервалах зондирования заданной области пространства. На втором этапе для каждого временного интервала подсчитывается число обнаруженных смежных спектральных составляющих и сравнивается с порогом. Способ характеризуется постоянным уровнем ложного обнаружения, величина которого задается значением множителя Т. Достигаемым техническим результатом является повышение возможностей по обнаружению и распознаванию вертолета на фоне подстилающей поверхности с помощью бортового радиолокатора. 6 ил, 1 табл.
Способ обнаружения и распознавания вертолета с использованием радиолокатора, заключающийся в анализе ширины полосы амплитудно-частотного спектра эхосигнала вращающейся лопасти вертолета, выделенного в нескольких смежных доплеровских фильтрах, отличающийся тем, что обнаружение отдельной спектральной составляющей эхосигнала вращающейся лопасти вертолета происходит, если Rm,j-ранг ее амплитуды, выделенной на выходе m-го доплеровского фильтра (m=1...М) в j-м временном интервале зондирования (j=1...N+1) заданной области пространства и уменьшенной в Т раз, определенный относительно амплитуд, выделенных на выходе этого же доплеровского фильтра в N смежных временных интервалах зондирования этой же области пространства, будет не менее установленного порога Rth, а принятие решения о распознавании вертолета будет в том случае, если Sj - сумма (количество) спектральных составляющих, обнаруженных в "окне" из М смежных доплеровских фильтров в j-м временном интервале зондирования заданной области пространства, будет не менее установленного порога Sth, причем число временных интервалов зондирования заданной области пространства N+1 может быть не более, чем частное от деления периода появления эхосигнала вращающейся лопасти вертолета Тn на длительность этого сигнала τ0, a значение величины Т при выбранных значениях N, М, Sth и Rth определяют заранее, исходя из заданной вероятности ложного обнаружения и распознавания вертолета F в соответствии с выражением

где  - число сочетаний из М по Sj;
- число сочетаний из М по Sj;
 - вероятность ложного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета в j-м временном интервале зондирования заданной области пространства;
- вероятность ложного обнаружения одной спектральной составляющей эхосигнала вращающейся лопасти вертолета в j-м временном интервале зондирования заданной области пространства;

вероятность распределения ранга Rm,j при наличии на выходе доплеровского фильтра только шумовых сигналов;
 - число сочетаний из N по Rm,j;
- число сочетаний из N по Rm,j;


Um,j - анализируемая амплитуда, выделенная на выходе m-го доплеровского фильтра в j-м временном интервале зондирования заданной области пространства; Um,i - амплитуды, выделенные на выходе m-го доплеровского фильтра в смежных временных интервалах зондирования заданной области пространства; W(U)n - интегральная функция распределения амплитуд, выделенных на выходах доплеровских фильтров при наличии только шумов; W(U,T)n - интегральная функция распределения уменьшенных в Т раз амплитуд, выделенных на выходах доплеровских фильтров при наличии только шумов.
| НОВЫЕ ПРОИЗВОДНЫЕ БЕНЗОДИАЗЕПИНА | 2010 |
|
RU2683325C2 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 1995 |
|
RU2096829C1 |
| Замок для соединения бортов формы | 1977 |
|
SU747724A1 |
| US 4660044 А, 21.04.1987. | |||

