1. Область техники, к которой относится изобретение
Изобретение относится к технике антенных измерений и может быть использовано для исследования диаграмм направленности (ДН) антенн методом облета.
2. Уровень техники
Известен способ измерения ДН диапазонной антенны, включающий излучение сигнала на каждой частоте рабочего диапазона с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны по заданной траектории [Способ измерения диаграммы направленности диапазонной антенны: А.С. СССР, SU 1804627 A3, G01R 29/10, 1993 г.].
Известен способ измерения ДН, основанный на облете в дальней зоне исследуемой антенны с помощью пилотируемых и непилотируемых летательных аппаратов, оборудованных соответствующей измерительной аппаратурой [Методы измерения характеристик антенн СВЧ / Л.Н. Захарьев, А.А. Леманский, В.И. Турчин и др.; Под ред. Н.М. Цейтлина. М.: Радио и связь, 1985, стр. 128-135].
Общим недостатком вышеперечисленных способов является высокая погрешность измерения параметров главного лепестка (ГЛ) ДН и невозможность расчета этой погрешности за один облет.
Известен способ измерения параметров направленности антенны с помощью беспилотного летательного аппарата (БПЛА) методом облета. При реализации способа БПЛА, оборудованный кроме бортовой измерительной аппаратуры и приемником спутниковой навигационной системы, совершает облет исследуемой антенны в дальней зоне. При измерении параметров направленности антенны в режиме передачи сигналы, излучаемые исследуемой антенной, принимают бортовой антенной, подвергают полосовой фильтрации, измеряют их мощность и вместе с текущими временем и координатами БПЛА записывают в бортовой накопитель информации, подключенный к бортовому вычислителю, рассчитывающему ДН антенны в режиме передачи сигналов исследуемой антенной [Способ измерения параметров направленности антенны с помощью БПЛА методом облета: пат. РФ, RU 2626561 C1, G01R 29/10, 28.07.2017 г.].
Недостатком данного способа является невозможность расчета погрешности измерения параметров ГЛ ДН антенны за один облет.
Наиболее близким решением к заявляемому по технической сущности и достигаемому результату является выбранный в качестве прототипа способ измерения параметров диаграммы направленности антенны на борту воздушного судна (ВС) [ГОСТ РВ 5865 - 019 - 2020. Радиоэлектронная защита систем, комплексов и средств военной связи. Требования к уровням боковых и задних лепестков диаграмм направленности апертурных антенн и методы их контроля. М.: Стандартинформ, 2021, стр. 13]. При реализации способа ВС (вертолет), оборудованный бортовыми средствами измерения и контроля (измерительным радиоприемником, приемной антенной и управляющей бортовой ЭВМ с периферийным оборудованием), а также приемником спутниковой навигационной системы, совершает облет исследуемой антенны в дальней зоне по предварительно определенному маршруту. При измерении параметров направленности антенны в режиме передачи сигналы, излучаемые исследуемой антенной, принимают бортовой антенной, измеряют их мощность и вместе с координатами ВС записывают в бортовую ЭВМ. После окончания полета осуществляют взаимную привязку измеренных данных с координатами ВС, измеренные данные анализируют, рассчитывают и строят ДН. При этом отсчеты уровня сигнала преобразуют в значения напряженности поля на установленном расстоянии от антенны с учетом ее характеристик и информации о местоположении, а окончательное измерение уровня напряженности поля осуществляет оператор, который изучая форму измеренной интерференционной картины исключает те значения, которые имеют большие отклонения (ошибочные отсчеты) от рассчитанной ДН.
Однако существуют случайные факторы, которые снижают точность измерений данным способом параметров направленности антенны с помощью ВС (вертолета), а именно: наличие шумового фона при осуществлении измерений параметров направленности антенны; погрешность измерительных приборов; ошибки позиционирования ВС при проведении измерений. Кроме этого результирующее построение диаграммы направленности антенны (ДНА) осуществляется оператором только после окончания полета ВС на основе обработки результатов измерений, а для расчета погрешности измерения ширины ГЛ ДНА требуется несколько облетов.
В связи с этим недостатком выбранного в качестве прототипа способа является недостаточная оперативность обработки результатов измерений и, как следствие высокая стоимость измерений.
3. Раскрытие изобретения
Задачей изобретения, на решение которой направлено заявляемое изобретение, является разработка нового способа, обеспечивающего получение следующего технического результата: автоматическое измерение ширины ГЛ ДНА и расчет погрешности ее измерения за один облет, что, соответственно, сокращает время испытаний и стоимость их проведения.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что в способе измерения параметров диаграммы направленности антенны на борту ВС, заключающемся в том, что в режиме передачи сигналы, излучаемые исследуемой антенной, и сигналы навигационной системы принимают на борту ВС, совершающего облет исследуемой антенны в дальней зоне по предварительно определенному маршруту в горизонтальной плоскости, дополнительно ВС совершает облет углового сектора азимутальных углов, центр которого соответствует априорно заданному направлению максимума неподвижной ДН исследуемой антенны, и в режиме измерения ширины ГЛ ДН исследуемой антенны на передачу сигналы, принятые на борту ВС, ослабляют аттенюатором, осуществляют их полосовую фильтрацию, оцифровывают в цифровом приемнике и передают в бортовой вычислитель вместе с временем их приема и текущими геодезическими координатами ВС полученными посредством бортовой навигационной антенны и бортового навигационного приемника, осуществляют в бортовом вычислителе пересчет геодезических координат в сферические, которые используют для расчета ширины ГЛ ДН исследуемой антенны, и вместе с соответствующими измерениями мощности сигналов записывают в бортовой цифровой накопитель, и затем после окончания облета заданного углового сектора азимутальных углов бортовой вычислитель, используя данные, хранящиеся в бортовом цифровом накопителе, рассчитывают модуль ГЛ ДН исследуемой антенны и вычисляет его ширину и погрешность этих вычислений, а именно: осуществляют полиномиальное сглаживание выборки измерений мощности сигналов, хранящихся в бортовом цифровом накопителе, рассчитывают левую и правую границы ГЛ ДНА, ширину ГЛ ДНА по уровню половинной мощности, сглаженную выборку измерений мощности сигналов демодулируют и центрируют и определяют ее дисперсию, полученную выборку демодулированных и центрированных измерений мощности сигналов проверяют на отсутствие аномальных измерений (грубых ошибок) с последующим исключением аномальных элементов выборки из дальнейшей обработки, осуществляют проверку данной выборки на нормальность, некоррелированность и отсутствие тренда, рассчитывают корреляционную матрицу погрешностей оценки коэффициентов сглаживающего полинома и определяют дисперсию погрешности оценки сглаженных измерений мощности сигналов соответствующих модулю измеряемой ДНА, рассчитывают среднюю квадратическую погрешность измерения ширины ГЛ ДНА по уровню половинной мощности, а результаты расчетов записывают в бортовой цифровой накопитель, при этом для корректировки текущих геодезических координат ВС в наземном эталонном навигационном приемнике на основе принятых наземной навигационной антенной координат вычисляются дифференциальные поправки геодезических координат, которые через наземный телеметрический передатчик и наземную телеметрическую передающую антенну передают по эфиру на вход бортовой телеметрической приемной антенны и далее, через телеметрический приемник, передают на вход бортового навигационного приемника, а гиростабилизированная платформа обеспечивает постоянную ориентацию бортовой антенны на исследуемую антенну.
Сопоставительный анализ с прототипом показывает, что предложенный способ обладает другими существенными, новыми отличительными от прототипа признаками. Новыми отличительными признаками заявляемого способа являются:
- демодуляция и центрирование выборки измерений мощности принятых сигналов;
- исключение из выборки измерений мощности принятых сигналов грубых ошибок (аномальных измерений);
- проверка выборки демодулированных и центрированных измерений мощности на принадлежность к нормальному закону измерений;
установление статистической независимости элементов демодулированной и центрированной выборки измерений мощности путем выявления отсутствия тренда и автокорреляции;
- расчет корреляционной матрицы погрешностей оценки коэффициентов сглаживающего полинома, описывающего ГЛ ДНА.
Отличительные признаки являются существенными, так как каждый из них необходим, а все вместе достаточны для достижения поставленной задачи изобретения, на решение которой направлено заявляемое изобретение.
4. Пояснения к графическим материалам
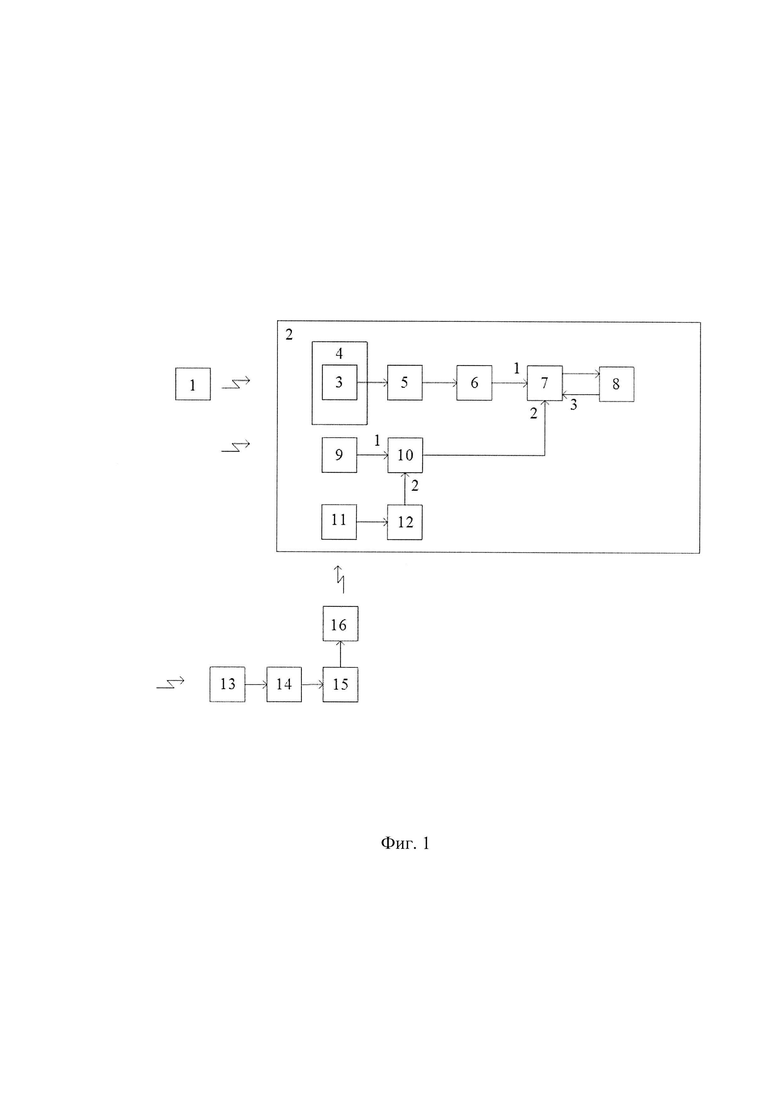
На фиг. 1 приведена схема устройства, которое может быть использовано для измерения ширины ГЛ ДН исследуемой антенны на передачу. Устройство содержит исследуемую антенну (РЛС) 1, воздушное судно (ВС) 2, бортовую антенну 3, гиростабилизированную платформу (ГСП) 4, аттенюатор 5, цифровой приемник 6, бортовой вычислитель 7, бортовой цифровой накопитель 8, бортовую навигационную антенну 9, бортовой навигационный приемник 10, бортовую телеметрическую приемную антенну 11, телеметрический приемник 12, наземную навигационную антенну 13, наземный эталонный навигационный приемник 14, наземный телеметрический передатчик 15 и наземную телеметрическую передающую антенну 16. При этом выход размещенной на земле исследуемой антенны (РЛС) 1 связан по эфиру с бортовой антенной 3 ВС 2, а на борту ВС 2 бортовая антенна 3, размещенная на гиростабилизированной платформе 4, аттенюатор 5 и цифровой приемник 6, выход которого соединен с первым входом бортового вычислителя 7, соединены последовательно, выход бортового вычислителя 7 соединен с входом бортового цифрового накопителя 8, выход которого соединен с третьим входом бортового вычислителя 7, выход бортовой навигационной антенны 9 соединен с первым входом бортового навигационного приемника 10, выход которого соединен с вторым входом бортового вычислителя 7, выход бортовой телеметрической приемной антенны 11 соединен с входом телеметрического приемника 12, выход которого соединен с вторым входом бортового навигационного приемника 10, а наземная навигационная антенна 13, наземный эталонный навигационный приемник 14, наземный телеметрический передатчик 15 и наземная телеметрическая передающая антенна 16, выход которой соединен по эфиру с входом бортовой телеметрической приемной антенны 11, соединены последовательно.
На фиг. 2 поясняется влияние крутизны модуля ГЛ ДНА на погрешность измерения его ширины.
На фиг. 3 приведен модуль ДНА и соответствующая ему модель измерений мощности при наличии аномальных измерений (грубых ошибок).
На фиг. 4 приведена модель измерений мощности и соответствующий ей сглаживающий полином  при наличии аномальных измерений (грубых ошибок).
при наличии аномальных измерений (грубых ошибок).
На фиг. 5 приведена модель измерений мощности и соответствующий ей сглаживающий полином  полученный после удаления аномальных измерений (грубых ошибок) из выборки измерений мощности.
полученный после удаления аномальных измерений (грубых ошибок) из выборки измерений мощности.
На фиг. 6 приведены демодулированные и центрированные значения измерений мощности  и их автокорреляционная функция.
и их автокорреляционная функция.
На фиг. 7 приведены распределение выборки демодулированных и центрированных значений измерений мощности  полученной в ходе моделирования, и теоретическое нормальное распределение с параметрами, определенными по этой выборке, используемые при ее проверке по «критерию
полученной в ходе моделирования, и теоретическое нормальное распределение с параметрами, определенными по этой выборке, используемые при ее проверке по «критерию  ».
».
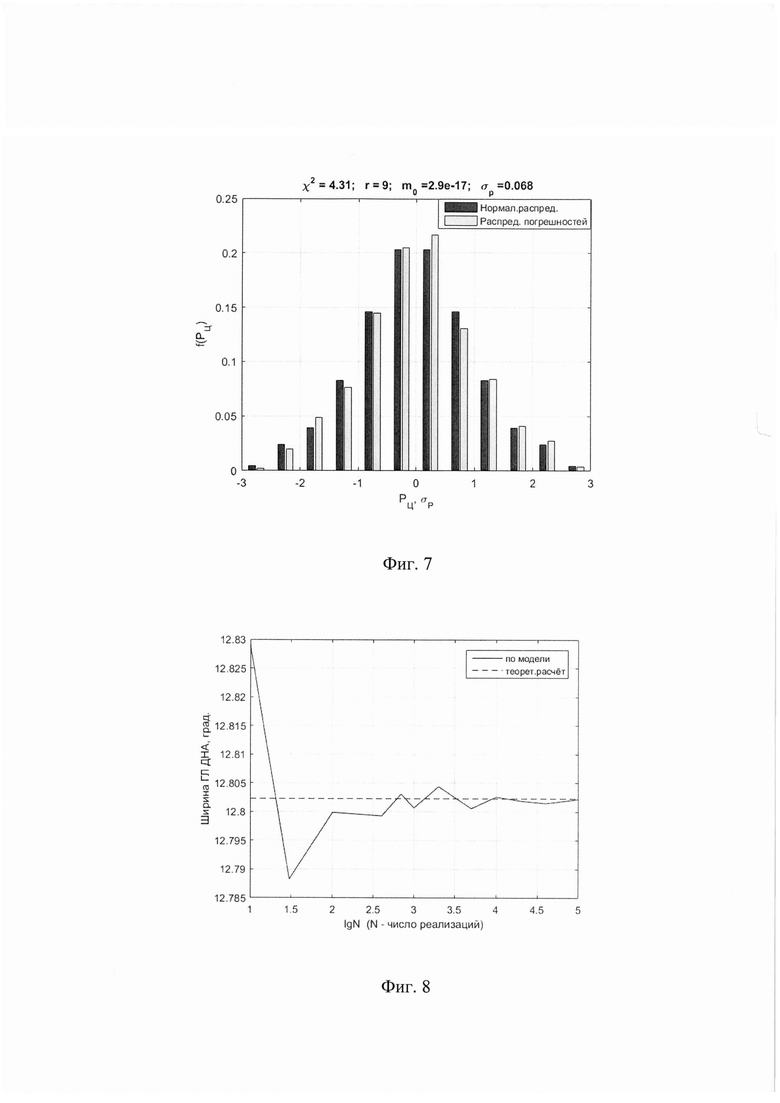
На фиг. 8 показана сходимость среднего значения ширины ГЛ моделируемой ДНА к ширине ГЛ теоретически рассчитанной ДНА в зависимости от числа циклов цифрового статистического моделирования.
На фиг. 9 показана сходимость усредненного значения полученной предлагаемым способом средней квадратической погрешности измерения ширины ГЛ ДНА (линия 1) и среднего квадратического отклонения ширины ГЛ моделируемой ДНА от ширины ГЛ теоретически рассчитанной ДНА (линия 2) в зависимости от числа реализаций цифрового статистического моделирования.
На фиг. 10 приведены графики измеренной предлагаемым способом ширины ГЛ моделируемой ДНА, доверительный интервал измерений, и ширина ГЛ теоретически рассчитанной ДНА.
Для реализации предлагаемого технического решения может быть использовано стандартное оборудование.
Исследуемая антенна (РЛС) 1 может быть выполнена в виде РЛС типа П-18Р [Военно-техническая подготовка. Устройство РЛС РТВ ВВС.Радиолокационная станция П-18Р: учеб. в 2 ч. 4.1/ Е.Н. Гарин, Д.Д. Дмитриев, В.Н. Тяпкин и др.; ред. Е.Н. Гарин. - Красноярск: Сиб. федер. ун-т, 2012 г.].
ВС 2 может быть выполнено в виде вертолета или же беспилотного летательного аппарата (БЛА) [Патент РФ RU 2666493, Беспилотный летательный аппарат, МКП В64С 39/00, 2018 г. ].
Бортовая антенна 3 может быть выполнена в виде турникетной антенны [И.Н. Григоров. Антенны. М.: Радиософт, 2003 г., стр. 152, рис. 13.1].
ГСП 4 может быть выполнена в виде гиростабилизированного подвеса требуемой грузоподъемности [Сайт-портал https://russiandrone.ru. [Электронный ресурс]: URL: https://russiandrone.ru/catalog/poleznaya-nagruzka/girostabilizirovannye-podvesy/girostabilizirovannye-platformy].
Аттенюатор 5 может быть выполнен в виде аттенюатора с ручным управлением типа 5-3-127-A-1-S-12V [Белов Л.А. Аттенюаторы СВЧ-сигналов // Электроника: НТБ, 2006, №2].
Цифровой приемник 6 может быть выполнен в виде анализатора спектра Agilent N9917A [Контрольно-измерительные решения Agilent. США: каталог фирмы Agilent, 2014 г.].
Бортовой вычислитель 7 может быть выполнен в виде микро-ЭВМ типа LP-174 [LP-174 User's manual. Edition 1.3, 2016. [Электронный ресурс: URL: https://www.manualslib.com/download/1449575/Commell-Lp-174.htm].
Бортовой цифровой накопитель 8 может быть выполнен в виде в виде устройства памяти SSD типа Tammuz GK300 [Электронный ресурс: URL: https://www.dns-shop.ru/product/bdf0436e70ca3332/128-gb-25-sata-nakopitel-tammuz-gk300-tgk30128a58/characteristics/].
Бортовая навигационная антенна 9, бортовой навигационный приемник 10, бортовая телеметрическая приемная антенна 11, телеметрический приемник 12, наземная навигационная антенна 13, наземный эталонный навигационный приемник 14, наземный телеметрический передатчик 15 и наземная телеметрическая передающая антенна 16 могут быть выполнены в виде комплекта GNSS приемника Leica GPS ISG60 (GSM/GPRS/RTK Ровер+База ICON КЮ60+Контроллер ICON СС 80+Контроллер ICON СС 50) [Электронный ресурс: URL: https://geosistems.ru/shop/gnss-oborudovanie/recomenduemye-koplekty/rtk-basa-i-rover].
5. Осуществление изобретения
ВС 2 в дальней зоне исследуемой антенны (РЛС) 1 совершает облет углового сектора азимутальных углов, центр которого соответствует априорно заданному направлению максимума неподвижной ДН исследуемой антенны (РЛС) 1. Облет проводят на одном удалении от фазового центра исследуемой антенны (РЛС) 1 и на одной высоте с постоянной скоростью. Во время полета ВС 2 по заданному маршруту сигналы, излучаемые исследуемой антенной (РЛС) 1, принимают на борту ВС 2 бортовой антенной 3, ослабляют аттенюатором 5, осуществляют их полосовую фильтрацию, оцифровывают в цифровом приемнике 6 и передают в бортовой вычислитель 7. Полученные посредством бортовой навигационной антенны 9 и бортового навигационного приемника 10 текущие геодезические координаты ВС 2 вместе с временем также передают в бортовой вычислитель 7. В бортовом вычислителе 7 пересчитывают геодезические координаты в сферические координаты (дальность, азимут, угол места), которые используются для расчета ширины ГЛ ДНА исследуемой антенны (РЛС) 1, и вместе с соответствующими измерениями мощности записывают в бортовой цифровой накопитель 8. После окончания облета заданного углового сектора азимутальных углов бортовой вычислитель 7, используя данные, хранящиеся в бортовом цифровом накопителе 8, рассчитывают модуль ГЛ ДН исследуемой антенны (РЛС) 1 и вычисляют его ширину и погрешность этих вычислений. Результаты расчетов записывают в бортовой цифровой накопитель 8. Для корректировки текущих геодезических координат ВС 2 в наземном эталонном навигационном приемнике 14 на основе принятых наземной навигационной антенной 13 координат вычисляют дифференциальные поправки геодезических координат, которые через наземный телеметрический передатчик 15 и наземную телеметрическую передающую антенну 16 передают по эфиру на вход бортовой телеметрической приемной антенны 11 и далее, через телеметрический приемник 12, передают на второй вход бортового навигационного приемника 10. ГСП 4 обеспечивает постоянную ориентацию бортовой антенны 3 на исследуемую антенну (РЛС) 1.
При пересчете координат геодезические координаты (широта, долгота, высота) сначала пересчитываются в геоцентрическую систему координат (СК) согласно [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат.Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст., стр. 6, формулы (1) - (3)], затем из геоцентрической СК в топоцентрическую прямоугольную СК, центр которой находится в фазовом центре исследуемой антенны (РЛС) 1, согласно [Ю. С.Саврасов. Алгоритмы и программы в радиолокации. М.: Радио и связь, 1985, стр. 130, формулы (5.6) - (5.8)] и затем в сферическую СК (дальность, азимут, угол места) согласно [Ю. С.Саврасов. Алгоритмы и программы в радиолокации. М.: Радио и связь, 1985, стр. 130, формулы (5.5)].
Расчет ширины ГЛ ДН исследуемой антенны (РЛС) 1 и погрешности этих вычислений рассчитывают следующим образом. В результате пролета ВС 2 вдоль азимутального сечения ДН исследуемой антенны (РЛС) 1 в плоскости азимутальных углов  получают выборку из М измерений мощности
получают выборку из М измерений мощности  , где
, где - равнодискретная последовательность углов, i=1…М, хранящуюся в бортовом цифровом накопителе 8. Непосредственно по этой выборке нельзя рассчитать ширину ГЛ ДНА. Нельзя также получить и оценку погрешностей измерений мощности, поскольку эти измерения промодулированы формой модуля ДН исследуемой антенны (РЛС) 1. Поэтому сначала осуществляют полиномиальное сглаживание выборки
- равнодискретная последовательность углов, i=1…М, хранящуюся в бортовом цифровом накопителе 8. Непосредственно по этой выборке нельзя рассчитать ширину ГЛ ДНА. Нельзя также получить и оценку погрешностей измерений мощности, поскольку эти измерения промодулированы формой модуля ДН исследуемой антенны (РЛС) 1. Поэтому сначала осуществляют полиномиальное сглаживание выборки  с получением полинома, описывающего модуль ГЛ ДНА, вида
с получением полинома, описывающего модуль ГЛ ДНА, вида

где K - степень полинома;
bk - коэффициенты полинома.
Непосредственно коэффициенты полинома (1) можно вычислить с помощью функции Матлаб  , где Р - массив измеренных значений мощности
, где Р - массив измеренных значений мощности  - массив соответствующих им углов, S - содержит вспомогательную информацию. Степень полинома выбирают до начала измерений по результатам цифрового статистического моделирования (поясняется в примере, рассматриваемом ниже).
- массив соответствующих им углов, S - содержит вспомогательную информацию. Степень полинома выбирают до начала измерений по результатам цифрового статистического моделирования (поясняется в примере, рассматриваемом ниже).
После получения полинома (1) рассчитывают левую границу  и правую границу
и правую границу  ГЛ ДНА на уровне половинной мощности путем итерационного решения системы уравнений:
ГЛ ДНА на уровне половинной мощности путем итерационного решения системы уравнений:

где  - максимальное значение полинома
- максимальное значение полинома  .
.
Система уравнений (2) может быть решена методом «золотого сечения» [В.Ф. Формалев, Д.Л. Ревизников. Численные методы. М.: ФИЗМАТ ЛИТ, 2004, стр. 200-203].
Ширину ГЛ ДНА по уровню половинной мощности, равной  , рассчитывают, как
, рассчитывают, как

После получения сглаживающего полинома выборку измерений  демодулируют и центрируют в соответствии с выражением
демодулируют и центрируют в соответствии с выражением

где  - демодулированные измерения мощности;
- демодулированные измерения мощности;
 - среднее выборочное демодулированных измерений мощности.
- среднее выборочное демодулированных измерений мощности.
Определяют дисперсию выборки  как
как

Дисперсия  является оценкой погрешностей измерения мощности без учета модулирующего влияния формы ДН исследуемой антенны (РЛС) 1.
является оценкой погрешностей измерения мощности без учета модулирующего влияния формы ДН исследуемой антенны (РЛС) 1.
Полученную выборку демодулированных и центрированных измерений мощности  проверяют на отсутствие аномальных измерений (грубых ошибок), например, по критерию Граббса [ГОСТ 8.736-2011. Измерения прямые многократные. Методы обработки результатов измерений. Основные положения. Утвержден и введен в действие приказом Федерального агентства по техническому регулированию и метрологии №1045-ст от 13 декабря 2011 г., стр. 4, Приложение А] с последующим исключением аномальных элементов выборки из дальнейшей обработки. Причем, вместо исключенного из этой выборки значения
проверяют на отсутствие аномальных измерений (грубых ошибок), например, по критерию Граббса [ГОСТ 8.736-2011. Измерения прямые многократные. Методы обработки результатов измерений. Основные положения. Утвержден и введен в действие приказом Федерального агентства по техническому регулированию и метрологии №1045-ст от 13 декабря 2011 г., стр. 4, Приложение А] с последующим исключением аномальных элементов выборки из дальнейшей обработки. Причем, вместо исключенного из этой выборки значения  в нее вводят скорректированное значение, равное среднему от предыдущего значения
в нее вводят скорректированное значение, равное среднему от предыдущего значения  и последующего значения
и последующего значения  . Также исключают из выборки измерений мощности
. Также исключают из выборки измерений мощности  те значения, которые соответствуют исключенным из демодулированной и центрированной выборки измерений мощности, а вместо исключенного значения
те значения, которые соответствуют исключенным из демодулированной и центрированной выборки измерений мощности, а вместо исключенного значения  в нее вводят скорректированное значение, равное среднему от предыдущего значения
в нее вводят скорректированное значение, равное среднему от предыдущего значения  и последующего значения
и последующего значения  Затем вновь, как было описано выше, сглаживают скорректированную выборку измерений мощности
Затем вновь, как было описано выше, сглаживают скорректированную выборку измерений мощности  методом наименьших квадратов, получают сглаживающий полином (1), определяют левую границу
методом наименьших квадратов, получают сглаживающий полином (1), определяют левую границу  и правую границу
и правую границу  ГЛ ДН исследуемой антенны согласно (2), рассчитывают его ширину по уровню половинной мощности
ГЛ ДН исследуемой антенны согласно (2), рассчитывают его ширину по уровню половинной мощности  согласно (3), получают демодулированную и центрированную выборку измерений мощности
согласно (3), получают демодулированную и центрированную выборку измерений мощности  согласно (4), определяют дисперсию этой выборки
согласно (4), определяют дисперсию этой выборки  согласно (5).
согласно (5).
Проверку демодулированной и центрированной выборки измерений мощности  на:
на:
нормальность проводят, например, по «критерию  » Пирсона с r-3+K степенями свободы с доверительной вероятностью а [Рекомендации по стандартизации. Прикладная статистика. Правила проверки согласия опытного распределения с теоретическим. Часть 1. Критерии типа хи-квадрат. Приняты и введены в действие Постановлением Госстандарта России от 14 декабря 2001 г., №525-ст., стр. 45-46, Приложение А (таблица А.28), Приложение Б (таблица Б.1)];
» Пирсона с r-3+K степенями свободы с доверительной вероятностью а [Рекомендации по стандартизации. Прикладная статистика. Правила проверки согласия опытного распределения с теоретическим. Часть 1. Критерии типа хи-квадрат. Приняты и введены в действие Постановлением Госстандарта России от 14 декабря 2001 г., №525-ст., стр. 45-46, Приложение А (таблица А.28), Приложение Б (таблица Б.1)];
некоррелированность проводят, например, по критерию автокорреляции [А.И. Кобзарь. Прикладная математическая статистика. Для инженеров и научных работников. - М.: «ФИЗМАТЛИТ», 2006, стр. 536-537];
отсутствие тренда проводят, например, по критерию серий Вальда-Волфовитца [А.И. Кобзарь. Прикладная математическая статистика. Для инженеров и научных работников. - М.: «ФИЗМАТЛИТ», 2006, стр. 526-529]. Если выборка  не принадлежит нормальному закону или имеет значимую автокорреляцию, имеет тренд или большое количество грубых ошибок, то следует устранить причины, вызвавшие это, и повторить измерения.
не принадлежит нормальному закону или имеет значимую автокорреляцию, имеет тренд или большое количество грубых ошибок, то следует устранить причины, вызвавшие это, и повторить измерения.
При отсутствии в выборке  указанных недостатков рассчитывают погрешность измерения ширины ГЛ ДН исследуемой антенны (РЛС) 1. Из (2) очевидно, что погрешность измерения ширины ГЛ ДН исследуемой антенны (РЛС) 1 определяется не дисперсией
указанных недостатков рассчитывают погрешность измерения ширины ГЛ ДН исследуемой антенны (РЛС) 1. Из (2) очевидно, что погрешность измерения ширины ГЛ ДН исследуемой антенны (РЛС) 1 определяется не дисперсией  а дисперсией оценки соответствия полинома
а дисперсией оценки соответствия полинома  форме ГЛ измеряемой ДНА, т.е. дисперсией погрешности оценки сглаженных измерений мощности
форме ГЛ измеряемой ДНА, т.е. дисперсией погрешности оценки сглаженных измерений мощности  Для отыскания этой величины рассчитывают (K+1)×(K+1)-мерную корреляционную матрицу погрешностей оценки коэффициентов полинома (1) как [С.З. Кузьмин. Цифровая радиолокация. Введение в теорию. Киев: Издательство КВЩ, 2000, стр. 195, формула (7.28)]:
Для отыскания этой величины рассчитывают (K+1)×(K+1)-мерную корреляционную матрицу погрешностей оценки коэффициентов полинома (1) как [С.З. Кузьмин. Цифровая радиолокация. Введение в теорию. Киев: Издательство КВЩ, 2000, стр. 195, формула (7.28)]:

где  - мерная матрица Вандермонда, элементы которой представляют результат дифференцирования полинома (1) по k-му коэффициенту [С.З. Кузьмин. Цифровая радиолокация. Введение в теорию. Киев: Издательство КВЩ, 2000, стр. 194, формула (7.20)];
- мерная матрица Вандермонда, элементы которой представляют результат дифференцирования полинома (1) по k-му коэффициенту [С.З. Кузьмин. Цифровая радиолокация. Введение в теорию. Киев: Издательство КВЩ, 2000, стр. 194, формула (7.20)];
 - мерная корреляционная матрица погрешностей измерений мощности [С.З. Кузьмин. Цифровая радиолокация. Введение в теорию. Киев: Издательство КВЩ, 2000, стр. 189, формула (7.10)]; знаки «Г» и означают транспонирование и обращение матриц соответственно.
- мерная корреляционная матрица погрешностей измерений мощности [С.З. Кузьмин. Цифровая радиолокация. Введение в теорию. Киев: Издательство КВЩ, 2000, стр. 189, формула (7.10)]; знаки «Г» и означают транспонирование и обращение матриц соответственно.
Матрица  является диагональной, поскольку измерения мощности после проведенной демодуляции являются некоррелированными. Учет модулирующего действия ДНА на погрешности измерения мощности в (6) учитывают путем взвешивания диагональных элементов матрицы
является диагональной, поскольку измерения мощности после проведенной демодуляции являются некоррелированными. Учет модулирующего действия ДНА на погрешности измерения мощности в (6) учитывают путем взвешивания диагональных элементов матрицы  значениями полинома
значениями полинома  , рассчитанными в соответствующих точках шкалы углов
, рассчитанными в соответствующих точках шкалы углов  . Искомую дисперсию погрешности оценки сглаженных измерений мощности, т.е. дисперсию оценки соответствия функции
. Искомую дисперсию погрешности оценки сглаженных измерений мощности, т.е. дисперсию оценки соответствия функции  модулю измеряемой ДНА определяют как
модулю измеряемой ДНА определяют как

где  - элемент на пересечении первой строки и первого столбца матрицы
- элемент на пересечении первой строки и первого столбца матрицы 
Среднюю квадратическую погрешность измерения ширины ГЛ ДНА на уровне мощности  определяют согласно предлагаемого способа как
определяют согласно предлагаемого способа как

где  - оценка дисперсии погрешности измерения левой границы ГЛ ДНА, определяемая по правилу оценки погрешности косвенного измерения [МИ 2083-90. Измерения косвенные. Определение результатов измерений и оценивание их погрешностей. Введена в действие Комитетом стандартизации и метрологии СССР с 01.01.1992 г. ];
- оценка дисперсии погрешности измерения левой границы ГЛ ДНА, определяемая по правилу оценки погрешности косвенного измерения [МИ 2083-90. Измерения косвенные. Определение результатов измерений и оценивание их погрешностей. Введена в действие Комитетом стандартизации и метрологии СССР с 01.01.1992 г. ];
 - оценка дисперсии погрешности измерения правой границы ГЛ ДНА, определяемая по правилу оценки погрешности косвенного измерения [МИ 2083-90. Измерения косвенные. Определение результатов измерений и оценивание их погрешностей. Введена в действие Комитетом стандартизации и метрологии СССР с 01.01.1992 г.];
- оценка дисперсии погрешности измерения правой границы ГЛ ДНА, определяемая по правилу оценки погрешности косвенного измерения [МИ 2083-90. Измерения косвенные. Определение результатов измерений и оценивание их погрешностей. Введена в действие Комитетом стандартизации и метрологии СССР с 01.01.1992 г.];
 - значение производной от функции
- значение производной от функции  в точке
в точке  на левом краю ГЛ ДНА;
на левом краю ГЛ ДНА;
 значение производной от функции
значение производной от функции  в точке
в точке  на правом краю ГЛ ДНА; Рзал - уровень мощности, на котором проводится измерение ширины ГЛ ДНА;
на правом краю ГЛ ДНА; Рзал - уровень мощности, на котором проводится измерение ширины ГЛ ДНА;
 - функция, обратная функции
- функция, обратная функции 
Поскольку  является обратной функцией к функции
является обратной функцией к функции  то производные в (8) определяют как [Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1984, стр. 111 (таблица 4.5-2)]:
то производные в (8) определяют как [Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1984, стр. 111 (таблица 4.5-2)]:

где  - производная от функции
- производная от функции  по
по  .
.
Смысл производных в (8) поясняется на фиг. 2. Из приведенных на фиг. 2 двух случаев измерения следует, что одинаковые погрешности измерения мощности приводят к разным погрешностям в измерении границ ГЛ ДНА.
Там, где функция  имеет большую крутизну, т.е. большие значения производной
имеет большую крутизну, т.е. большие значения производной  и, соответственно, малые значения производной
и, соответственно, малые значения производной  погрешности будут меньше.
погрешности будут меньше.
6. Оценка работоспособности предлагаемого способа Оценка работоспособности предлагаемого способа измерения ширины ДНА методом облета и выбор степени полинома (1) была проведена методом статистического цифрового моделирования в соответствии с [ГОСТ 34100.3.1-
2017. Неопределенность измерения. Часть 3. Руководство по выражению неопределенности измерения. Дополнение 1. Трансформирование распределений с использованием метода Монте-Карло. Введен в действие Приказом Федерального агентства по техническому регулированию и метрологии №1066-ст от 12 сентября 2018 г.].
В качестве примера применялась модель измерения ширины ГЛ антенной решетки (АР) исследуемой антенны (РЛС) 1, содержащей 8 горизонтально расположенных излучателей, запитываемых синфазно равной амплитудой. Моделирование осуществлялось согласно [МИ 2091-90. Рекомендации. Государственная система обеспечения единства измерений. Измерения физических величин. Общие требования. М.: Издательство стандартов, 1991. Дата введения 01.01.1992 г., стр. 5-6] и [ГОСТ 34100.3.1-2017/. Неопределенность измерения. Часть 3. Руководство по выражению неопределенности измерения. Дополнение 1. Трансформирование распределений с использованием метода Монте-Карло (ISO/IEC Guide 98-3/Suppl 1:2008, IDT). Издание официальное. М.: Москва, Стандартинформ, 2018. Принят Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 14 июля 2017 г. №101-П).] следующим образом.
Измерения мощности моделировались в виде выражения [В.В. Быков. Цифровое моделирование в статистической радиотехнике. М.: Сов. радио, 1971, стр. 25, формула (1.12)]:

где randn(0;1) - случайное нормальное число с нулевым математическим ожиданием и единичной дисперсией;
 - заданное среднее квадратическое отклонение погрешностей измерений мощности;
- заданное среднее квадратическое отклонение погрешностей измерений мощности;
 - теоретическое значение нормированного модуля ДН АР, соответствующее угловому направлению
- теоретическое значение нормированного модуля ДН АР, соответствующее угловому направлению 
Теоретическое значение нормированного модуля ДН АР, соответствующее угловому направлению  , при условии изотропности излучателей определяют как [Справочник по радиолокации / Под ред. М. Сколника. 1970 / Пер. с англ. под общей ред. К.Н. Трофимова. В 4 томах. Том 2. Радиолокационные антенные устройства. Под ред. П.И. Дудника. М.: Сов. Радио. 1977, стр. 140, формула (3)]:
, при условии изотропности излучателей определяют как [Справочник по радиолокации / Под ред. М. Сколника. 1970 / Пер. с англ. под общей ред. К.Н. Трофимова. В 4 томах. Том 2. Радиолокационные антенные устройства. Под ред. П.И. Дудника. М.: Сов. Радио. 1977, стр. 140, формула (3)]:

где  - угол, отсчитываемый от нормали к АР;
- угол, отсчитываемый от нормали к АР;
S - число излучающих элементов (S=8);
 - длина волны;
- длина волны;
d - расстояние между излучающими элементами 
Значение степени сглаживающего полинома (1) выбирают путем последовательных уточнений (последовательного повышения степени полинома). Уточнения прекращаются, если величина среднего квадратического отклонения ширины ГЛ моделируемой ДНА от ширины теоретически рассчитанной ГЛ ДНА, полученная по N реализациям моделирования при степени сглаживающего полинома K+1, становится больше аналогично рассчитанной величины при степени сглаживающего полинома K, т.е. выполняется неравенство:

где  - ширина ГЛ теоретически рассчитанной ДНА по уровню половинной мощности;
- ширина ГЛ теоретически рассчитанной ДНА по уровню половинной мощности;
 - ширина ГЛ ДНА по уровню
- ширина ГЛ ДНА по уровню  , полученная в i-й реализации, при степени сглаживающего полинома K;
, полученная в i-й реализации, при степени сглаживающего полинома K;
 - ширина ГЛ ДНА по уровню
- ширина ГЛ ДНА по уровню , полученная в i-й реализации, при степени сглаживающего полинома K+1.
, полученная в i-й реализации, при степени сглаживающего полинома K+1.
Ширину ГЛ теоретически рассчитанной ДНА по уровню половинной мощности определяют, как

где левую границу  и правую границу
и правую границу  ГЛ ДНА определяют путем итерационного решения системы уравнений:
ГЛ ДНА определяют путем итерационного решения системы уравнений:

Среднее значение измеренной ширины ГЛ моделируемой ДНА за все циклы моделирования определяют, как

По результатам проведения 50000 циклов моделирования составлена таблица, в которой приведены результаты сравнения оценки ширины ГЛ ДНА на уровне половинной мощности, полученные предлагаемым способом при разных степенях сглаживающего полинома, с шириной ГЛ теоретически рассчитанной ДНА.

Из анализа таблицы следует, что степень полинома (1), используемого для сглаживания выборок измерений мощности  , получаемых при облете ГЛ ДНА с целью вычисления его ширины и погрешности ее вычисления, следует выбрать равной 6. Это обеспечит минимальное значение погрешности измерения ширины ГЛ ДНА
, получаемых при облете ГЛ ДНА с целью вычисления его ширины и погрешности ее вычисления, следует выбрать равной 6. Это обеспечит минимальное значение погрешности измерения ширины ГЛ ДНА  по сравнению с использованием других степеней полинома (1). При этом усредненная по всем циклам моделирования оценка среднего квадратического отклонения измерений ширины модуля ГЛ ДНА, полученная на основе МНК при K=6, составила
по сравнению с использованием других степеней полинома (1). При этом усредненная по всем циклам моделирования оценка среднего квадратического отклонения измерений ширины модуля ГЛ ДНА, полученная на основе МНК при K=6, составила  , что доказывает сходимость предлагаемого способа.
, что доказывает сходимость предлагаемого способа.
На фиг. 3-10 приведены результаты моделирования одной реализации измерений. Вид нормированного модуля ДН АР в пределах ГЛ и соответствующая модель нормированных измерений мощности приведены на фиг. 3. При моделировании нормированных измерений мощности было задано  относительно значения измеренной мощности на соответствующем угловом направлении. Как видно на фиг. 3 в измерениях мощности присутствуют двенадцать аномальных измерений.
относительно значения измеренной мощности на соответствующем угловом направлении. Как видно на фиг. 3 в измерениях мощности присутствуют двенадцать аномальных измерений.
На фиг. 4 приведены графики модели нормированных измерений мощности и сглаживающего полинома  6-й степени, полученные с помощью функции Матлаб
6-й степени, полученные с помощью функции Матлаб  , где
, где  - массив шкалы углов, Р - массив измерений мощности, K=6 - степень сглаживающего полинома до удаления из выборки измерений аномальных измерений. Как видно из графиков, приведенных на фиг. 4, наличие грубых ошибок приводит к искажению сглаживающего полинома.
- массив шкалы углов, Р - массив измерений мощности, K=6 - степень сглаживающего полинома до удаления из выборки измерений аномальных измерений. Как видно из графиков, приведенных на фиг. 4, наличие грубых ошибок приводит к искажению сглаживающего полинома.
На фиг. 5 приведены графики модели нормированных измерений мощности и сглаживающего полинома  6-й степени, полученные с помощью функции Матлаб
6-й степени, полученные с помощью функции Матлаб  где
где  - массив шкалы углов, Р - массив измерений мощности, K=6 - степень сглаживающего полинома после удаления из выборки измерений аномальных измерений (грубых ошибок), проведенного по критерию Граббса.
- массив шкалы углов, Р - массив измерений мощности, K=6 - степень сглаживающего полинома после удаления из выборки измерений аномальных измерений (грубых ошибок), проведенного по критерию Граббса.
На фиг. 6 приведены демодулированные и центрированные значения измерений мощности  и их автокорреляционная функция после удаления аномальных измерений. Как видно из качественного анализа графиков, приведенных на фиг. 6, выборка
и их автокорреляционная функция после удаления аномальных измерений. Как видно из качественного анализа графиков, приведенных на фиг. 6, выборка  выглядит как нормальная, некоррелированная и не имеющая тренда.
выглядит как нормальная, некоррелированная и не имеющая тренда.
Проверка гипотезы на нормальность выборки  проведена по «критерию
проведена по «критерию » Пирсона с r=R-3 степенями свободы и доверительной вероятностью 0,99 (уровень значимости α=0,01), где R=12 - число дискрет разбивки шкалы углов
» Пирсона с r=R-3 степенями свободы и доверительной вероятностью 0,99 (уровень значимости α=0,01), где R=12 - число дискрет разбивки шкалы углов  . Результат использования «критерия
. Результат использования «критерия  » в одной реализации моделирования приведен на фиг. 7. Необходимые для построения гистограмм распределения значения выборочного среднего и выборочного среднего квадратического отклонения выборки
» в одной реализации моделирования приведен на фиг. 7. Необходимые для построения гистограмм распределения значения выборочного среднего и выборочного среднего квадратического отклонения выборки  определялись с помощью функций Матлаб
определялись с помощью функций Матлаб  и
и  Их значения для примера, приведенного на фиг. 6, составили соответственно m0=2,9×1017 и
Их значения для примера, приведенного на фиг. 6, составили соответственно m0=2,9×1017 и 
Проверка качества (соответствия нормальному закону распределения) выборки  продолжается далее по критерию автокорреляции с доверительной вероятностью 0,99, а затем на отсутствие тренда - по сериальному критерию Вальда-Волфовитца также с доверительной вероятностью 0,99. Таким образом, общая доверительная вероятность (по результатам трех проверок) соответствия выборки
продолжается далее по критерию автокорреляции с доверительной вероятностью 0,99, а затем на отсутствие тренда - по сериальному критерию Вальда-Волфовитца также с доверительной вероятностью 0,99. Таким образом, общая доверительная вероятность (по результатам трех проверок) соответствия выборки  нормальному закону распределения составляет 0,993=0,97.
нормальному закону распределения составляет 0,993=0,97.
На фиг. 8 показана сходимость среднего значения ширины ГЛ моделируемой ДНА к ширине ГЛ теоретически рассчитанной ДНА в зависимости от числа циклов цифрового статистического моделирования.
На фиг. 9 показана сходимость усредненного значения полученной предлагаемым способом средней квадратической погрешности измерения ширины ГЛ ДНА  (линия 1) и среднего квадратического отклонения ширины ГЛ моделируемой ДНА от ширины ГЛ теоретически рассчитанной ДНА
(линия 1) и среднего квадратического отклонения ширины ГЛ моделируемой ДНА от ширины ГЛ теоретически рассчитанной ДНА  (линия 2) в зависимости от числа реализаций цифрового статистического моделирования.
(линия 2) в зависимости от числа реализаций цифрового статистического моделирования.
На фиг. 10 приведены графики измеренной предлагаемым способом ширины ГЛ моделируемой ДНА  , доверительный интервал, равный
, доверительный интервал, равный  град., и ширина ГЛ теоретически рассчитанной
град., и ширина ГЛ теоретически рассчитанной  полученные по результатам 300 реализаций цифрового статистического моделирования. Как видно из анализа графиков значение ширины ГЛ теоретически рассчитанной ДНА находится внутри доверительного интервала.
полученные по результатам 300 реализаций цифрового статистического моделирования. Как видно из анализа графиков значение ширины ГЛ теоретически рассчитанной ДНА находится внутри доверительного интервала.
Анализ работоспособности предлагаемого способа измерения ширины ДНА методом облета по сравнению с прототипом позволяет сделать вывод о достижении технического результата изобретения.
Таким образом, отличительные признаки заявляемого способа измерения ширины ДНА методом облета обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный сопоставительный анализ известных способов, технических решений (аналогов) в исследуемой и смежных предметных областях позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного способа, отсутствуют, что указывает на соответствие заявленного устройства условию "новизны".
Результаты поиска известных решений в области радиолокации, радиотехники и антенных измерений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого способа, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Изобретение является "промышленно приемлемым", поскольку предлагаемый способ может быть внедрен в существующих устройствах для измерения ДНА методом облета, а также использоваться в различных областях радиолокации, радиотехники и антенных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| Способ измерения пространственных диаграмм направленности антенн воздушных судов в условиях полёта | 2018 |
|
RU2692818C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2021 |
|
RU2781246C1 |
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |




Изобретение относится к антенной технике и служит для измерения параметров диаграммы направленности антенны (ДНА) методом облета. Технический результат - автоматическое измерение ширины главного лепестка (ГЛ) ДНА с высокой точностью и расчет погрешности ее измерения за один облет. Результат достигается тем, что осуществляют прием сигналов мощности излучения исследуемой антенны на борту воздушного судна, осуществляют их ослабление, полосовую фильтрацию, оцифровку и передачу в бортовой вычислитель вместе с временем их приема и текущими координатами, а также вычисляют модуль ГЛ ДН исследуемой антенны, его ширину и погрешность ее измерений. 1 табл., 10 ил.
Способ измерения ширины диаграммы направленности антенны (ДНА) методом облета, заключающийся в том, что в режиме передачи сигналы, излучаемые исследуемой антенной, и сигналы навигационной системы принимают на борту воздушного судна (ВС), совершающего облет исследуемой антенны в дальней зоне по предварительно определенному маршруту в горизонтальной плоскости, отличающийся тем, что ВС совершает облет углового сектора азимутальных углов, центр которого соответствует априорно заданному направлению максимума неподвижной диаграммы направленности (ДН) исследуемой антенны, и в режиме измерения ширины главного луча (ГЛ) ДН исследуемой антенны на передачу сигналы, принятые на борту ВС, ослабляют аттенюатором, осуществляют их полосовую фильтрацию, оцифровывают в цифровом приемнике и передают в бортовой вычислитель вместе с временем их приема и текущими геодезическими координатами ВС, полученными посредством бортовой навигационной антенны и бортового навигационного приемника, осуществляют в бортовом вычислителе пересчет геодезических координат в сферические, которые используют для расчета ширины ГЛ ДН исследуемой антенны, и вместе с соответствующими измерениями мощности сигналов записывают в бортовой цифровой накопитель, и после окончания облета заданного углового сектора азимутальных углов в бортовом вычислителе, используя данные, хранящиеся в бортовом цифровом накопителе, рассчитывают модуль ГЛ ДН исследуемой антенны и вычисляет его ширину и погрешность этих вычислений, а именно: осуществляют полиномиальное сглаживание выборки измерений мощности сигналов  , где i=1…M, М - число измерений, хранящихся в бортовом цифровом накопителе, методом наименьших квадратов в виде полиномиальной функции
, где i=1…M, М - число измерений, хранящихся в бортовом цифровом накопителе, методом наименьших квадратов в виде полиномиальной функции  где K - степень полинома, bk - коэффициенты полинома; рассчитывают левую
где K - степень полинома, bk - коэффициенты полинома; рассчитывают левую  и правую
и правую  границы ГЛ ДНА путем итерационного решения системы уравнений
границы ГЛ ДНА путем итерационного решения системы уравнений
где  - максимальное значение полинома
- максимальное значение полинома  ; рассчитывают ширину ГЛ ДНА по уровню половинной мощности по соотношению
; рассчитывают ширину ГЛ ДНА по уровню половинной мощности по соотношению  ; сглаженную выборку измерений мощности сигналов демодулируют и центрируют в соответствии с выражением
; сглаженную выборку измерений мощности сигналов демодулируют и центрируют в соответствии с выражением  , где
, где  - демодулированные измерения мощности,
- демодулированные измерения мощности,  - среднее выборочное демодулированных измерений мощности; определяют дисперсию выборки
- среднее выборочное демодулированных измерений мощности; определяют дисперсию выборки  по формуле
по формуле  ; исключают из демодулированной и центрированной выборки измерений мощности
; исключают из демодулированной и центрированной выборки измерений мощности  аномальные измерения, представляющие собой грубые ошибки, а вместо исключенного из данной выборки значения
аномальные измерения, представляющие собой грубые ошибки, а вместо исключенного из данной выборки значения  в нее вводят скорректированное значение, равное среднему от предыдущего значения
в нее вводят скорректированное значение, равное среднему от предыдущего значения  и последующего значения
и последующего значения  ; исключают из выборки измерений мощности
; исключают из выборки измерений мощности  значения, соответствующие исключенным из демодулированной и центрированной выборки измерений мощности, а вместо исключенного значения
значения, соответствующие исключенным из демодулированной и центрированной выборки измерений мощности, а вместо исключенного значения  вводят в нее скорректированное значение, равное среднему от предыдущего значения
вводят в нее скорректированное значение, равное среднему от предыдущего значения  и последующего значения
и последующего значения  ; а затем вновь сглаживают скорректированную выборку измерений мощности
; а затем вновь сглаживают скорректированную выборку измерений мощности  методом наименьших квадратов, получают полином
методом наименьших квадратов, получают полином  , определяют левую
, определяют левую и правую
и правую  границы ГЛ ДН исследуемой антенны, рассчитывают его ширину по уровню половинной мощности
границы ГЛ ДН исследуемой антенны, рассчитывают его ширину по уровню половинной мощности  , получают демодулированную и центрированную выборку измерений мощности
, получают демодулированную и центрированную выборку измерений мощности  , определяют дисперсию этой выборки
, определяют дисперсию этой выборки  , и проводят проверку выборки
, и проводят проверку выборки  на принадлежность к нормальному закону распределения, отсутствие автокорреляции и тренда, и, если выборка
на принадлежность к нормальному закону распределения, отсутствие автокорреляции и тренда, и, если выборка  принадлежит нормальному закону распределения и в ней отсутствует автокорреляция и тренд, формируют (М×М)-мерную корреляционную матрицу погрешностей измерений мощности в виде
принадлежит нормальному закону распределения и в ней отсутствует автокорреляция и тренд, формируют (М×М)-мерную корреляционную матрицу погрешностей измерений мощности в виде

рассчитывают (K+1)×(K+1)-мерную корреляционную матрицу погрешностей оценки измеренных значений мощности по соотношению
 где
где
 -мерная матрица Вандермонда, элементы которой представляют результат дифференцирования полинома
-мерная матрица Вандермонда, элементы которой представляют результат дифференцирования полинома  по k-му коэффициенту; определяют дисперсию оценки соответствия полинома
по k-му коэффициенту; определяют дисперсию оценки соответствия полинома  форме нормированного модуля ГЛ измеряемой ДНА в виде
форме нормированного модуля ГЛ измеряемой ДНА в виде  , где
, где  - элемент на пересечении первой строки и первого столбца матрицы
- элемент на пересечении первой строки и первого столбца матрицы  ; рассчитывают значения производных от функции
; рассчитывают значения производных от функции  являющейся обратной к функции
являющейся обратной к функции  , в точках
, в точках  на левом и правом краях главного луча ДНА по соотношениям
на левом и правом краях главного луча ДНА по соотношениям  и
и  , где
, где  - производная от функции
- производная от функции  по
по  на левой границе ГЛ ДНА, а
на левой границе ГЛ ДНА, а  - производная от функции по
- производная от функции по  на правой границе ГЛ ДНА; рассчитывают среднюю квадратическую погрешность измерения ширины ГЛ ДНА по соотношению
на правой границе ГЛ ДНА; рассчитывают среднюю квадратическую погрешность измерения ширины ГЛ ДНА по соотношению  где
где  - оценка дисперсии погрешности измерения левой границы ГЛ ДНА, а
- оценка дисперсии погрешности измерения левой границы ГЛ ДНА, а  - оценка дисперсии погрешности измерения правой границы ГЛ ДНА и записывают значения ширины ГЛ ДН исследуемой антенны и среднюю квадратическую погрешность ее измерения в бортовой цифровой накопитель; а в случае наличия в выборке демодулированных и центрированных измерений мощности
- оценка дисперсии погрешности измерения правой границы ГЛ ДНА и записывают значения ширины ГЛ ДН исследуемой антенны и среднюю квадратическую погрешность ее измерения в бортовой цифровой накопитель; а в случае наличия в выборке демодулированных и центрированных измерений мощности  аномальных измерений, представляющих собой грубые ошибки, более установленного количества, или невыполнения критерия принадлежности ее к нормальному закону распределения, или наличия в ней автокорреляции, или тренда результаты измерений отменяют как некорректные, проводят повторный пролет ВС по заданному маршруту и повторяют измерения и соответствующие им расчеты, предварительно устранив причины некорректности измерений, полученных в предыдущем полете, причем степень полинома К определяют перед началом измерений путем последовательных уточнений, а именно последовательного повышения степени полинома, в ходе цифрового статистического моделирования измерений исследуемой ДН, прекращая уточнение, если величина среднего квадратического отклонения ширины ГЛ моделируемой ДНА от ширины ГЛ теоретически рассчитанной ДНА, полученная по N реализациям моделирования при степени сглаживающего полинома K+1, становится больше аналогично рассчитанной величины при степени сглаживающего полинома K, т.е. выполняется неравенство
аномальных измерений, представляющих собой грубые ошибки, более установленного количества, или невыполнения критерия принадлежности ее к нормальному закону распределения, или наличия в ней автокорреляции, или тренда результаты измерений отменяют как некорректные, проводят повторный пролет ВС по заданному маршруту и повторяют измерения и соответствующие им расчеты, предварительно устранив причины некорректности измерений, полученных в предыдущем полете, причем степень полинома К определяют перед началом измерений путем последовательных уточнений, а именно последовательного повышения степени полинома, в ходе цифрового статистического моделирования измерений исследуемой ДН, прекращая уточнение, если величина среднего квадратического отклонения ширины ГЛ моделируемой ДНА от ширины ГЛ теоретически рассчитанной ДНА, полученная по N реализациям моделирования при степени сглаживающего полинома K+1, становится больше аналогично рассчитанной величины при степени сглаживающего полинома K, т.е. выполняется неравенство

где  - ширина ГЛ теоретически рассчитанной ДНА по уровню половинной мощности,
- ширина ГЛ теоретически рассчитанной ДНА по уровню половинной мощности,  - ширина ГЛ ДНА по уровню
- ширина ГЛ ДНА по уровню  , полученная в i-й реализации при степени сглаживающего полинома K,
, полученная в i-й реализации при степени сглаживающего полинома K,  - ширина ГЛ ДНА по уровню
- ширина ГЛ ДНА по уровню , полученная в i-й реализации при степени сглаживающего полинома K+1; при этом для корректировки текущих геодезических координат ВС в наземном эталонном навигационном приемнике на основе принятых наземной навигационной антенной координат вычисляются дифференциальные поправки геодезических координат, которые через наземный телеметрический передатчик и наземную телеметрическую передающую антенну передают по эфиру на вход бортовой телеметрической приемной антенны и далее, через телеметрический приемник, передают на вход бортового навигационного приемника, а гиростабилизированная платформа обеспечивает постоянную ориентацию бортовой антенны на исследуемую антенну.
, полученная в i-й реализации при степени сглаживающего полинома K+1; при этом для корректировки текущих геодезических координат ВС в наземном эталонном навигационном приемнике на основе принятых наземной навигационной антенной координат вычисляются дифференциальные поправки геодезических координат, которые через наземный телеметрический передатчик и наземную телеметрическую передающую антенну передают по эфиру на вход бортовой телеметрической приемной антенны и далее, через телеметрический приемник, передают на вход бортового навигационного приемника, а гиростабилизированная платформа обеспечивает постоянную ориентацию бортовой антенны на исследуемую антенну.
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Способ измерения диаграммы направленности диапазонной антенны | 1990 |
|
SU1804627A3 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| US 11044025 B1, 22.06.2021 | |||
| US 11415615 B2, 16.08.2022. | |||

