1. Область техники, к которой относится изобретение
Изобретение относится к технике антенных измерений и может быть использовано для исследования узконаправленных диаграмм направленности (ДН) антенн методом облета.
2. Уровень техники
Известен способ измерения ДН диапазонной антенны, включающий излучение сигнала на каждой частоте рабочего диапазона с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны по заданной траектории [Способ измерения диаграммы направленности диапазонной антенны: А.С. СССР, SU 1804627 A3, G01R 29/10, 1993 г.].
Известен способ измерения ДН, основанный на облете в дальней зоне исследуемой антенны с помощью пилотируемых и непилотируемых летательных аппаратов, оборудованных соответствующей измерительной аппаратурой [Методы измерения характеристик антенн СВЧ / Л.Н. Захарьев, А.А. Леманский, В.И. Турчин и др.; Под ред. Н.М. Цейтлина. М.: Радио и связь, 1985, стр. 128-135].
Известен способ, основанный на использовании бортового источника излучений, перемещаемого в пространстве относительно исследуемой антенны с помощью летательного аппарата, наземной опорной антенны, работающей на частоте исследуемой антенны, средств измерения координат летательного аппарата и включающий в себя излучение измерительных сигналов бортовым источником, прием излученных сигналов исследуемой антенной и опорной антенной, измерение отношения амплитуд принятых измерительного и опорного сигналов, измерение текущих угловых координат летательного аппарата, ориентирование оси опорной антенны на летательный аппарат в процессе измерений [Страхов А.Ф. Автоматизированные антенные измерения. - М.: Радио и связь, 1985, стр. 73-75].
Общим недостаткам вышеперечисленных способов является низкая точность измерения параметров главного лепестка (ГЛ) ДН.
Наиболее близким решением к заявляемому по технической сущности и достигаемому результату является выбранный в качестве прототипа способ измерения параметров направленности антенны с помощью беспилотного летательного аппарата (БПЛА) (далее по тексту БЛА) методом облета [Способ измерения параметров направленности антенны с помощью БПЛА методом облета: пат. РФ, RU 2626561 C1, G01R 29/10, 28.07.2017 г.]. При реализации способа БЛА, оборудованный кроме прочего и приемником спутниковой навигационной системы, совершает облет исследуемой антенны в дальней зоне. При измерении параметров направленности антенны в режиме передачи сигналы, излучаемые исследуемой антенной, принимают бортовой антенной, подвергают полосовой фильтрации, измеряют их мощность и вместе с текущими временем и координатами БЛА записывают в бортовой накопитель информации. При измерении параметров направленности антенны в режиме приема сигналы излучают бортовой антенной, принимают исследуемой антенной, обрабатывают в приемном измерительном устройстве и подают в ЭВМ, а на борту БЛА в бортовой накопитель информации записывают текущие время и координаты. После окончания полета осуществляют взаимную привязку сигналов с временем и координатами БЛА. Для повышения точности измерений амплитуды сигналов и построения ДН в результат измерений вносятся поправки на основе данных о положении БЛА относительно исследуемой антенны в момент измерений и априорно известной ДН бортовой антенны.
Однако существуют случайные факторы, которые снижают точность измерений данным способом параметров направленности антенны с помощью БЛА, а именно: наличие шумового фона при осуществлении измерений параметров направленности антенны; погрешность измерительных приборов; ошибки позиционирования БЛА при проведении измерений.
В связи с этим недостатком выбранного в качестве прототипа способа является низкая точность измерения параметров ГЛ ДН из-за недостаточного учета случайных факторов, влияющих на результаты измерений.
3. Раскрытие изобретения
Задачей изобретения, на решение которой направлено заявляемое изобретение, является разработка нового способа, обеспечивающего получение следующего технического результата: повышение точности измерения параметров ГЛ ДН антенны, сокращение времени их измерения и как следствие уменьшение стоимости исследования.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что в способе измерения параметров направленности антенны с помощью БЛА методом облета, заключающемся в том, что в режиме передачи сигналы, излучаемые исследуемой антенной, принимают на борту БЛА и подвергают полосовой фильтрации, а в режиме приема сигналы, излучаемые с борта БЛА, принимают исследуемой антенной, дополнительно БЛА совершает облет ограниченного углового сектора, центр которого соответствует априорно заданному направлению максимума неподвижной ДН исследуемой антенны, и в режиме передачи исследуемой антенны сигналы, принятые на борту БЛА, при необходимости ослабляют, разделяют на квадратурные составляющие, оцифровывают в цифровом приемнике и записывают оцифрованные сигналы вместе с временем их приема и текущими геодезическими координатами БЛА в бортовой цифровой накопитель, подключенный к бортовому вычислителю, рассчитывающему ДН в режиме передачи сигналов исследуемой антенной, а в режиме приема исследуемой антенны сигналы, излученные с борта БЛА, и принятые данной антенной, усиливают, разделяют на квадратурные составляющие, оцифровывают в цифровом приемнике и записывают оцифрованные сигналы вместе с временем их приема в наземный цифровой накопитель, подключенный к наземному вычислителю, рассчитывающему ДН в режиме приема сигналов исследуемой антенной, причем время излучения сигналов с борта БЛА, а также его геодезические координаты на это время записывают в бортовой цифровой накопитель, а после окончания полета бортовой цифровой накопитель подключают к наземному вычислителю для расчета ДН в режиме приема сигналов исследуемой антенны, осуществляют временную привязку сигналов, принятых исследуемой антенной в режиме приема, и геодезических координат БЛА на момент их излучения, и затем выполняют одинаковые операции как при расчете ДН исследуемой антенны на прием, осуществляемые в наземном вычислителе, так и при расчете ее ДН на передачу, осуществляемые в бортовом вычислителе, а именно: пересчитывают геодезические координаты БЛА, соответствующие времени излучения или приема этих сигналов, в сферическую систему координат, центр которой совпадает с фазовым центром исследуемой антенны, осуществляют согласованную фильтрацию записанных в соответствующем цифровом накопителе сигналов, осуществляют их детектирование и временную селекцию, нормируют их мощность в зависимости от дальности, на которой находился БЛА в момент их излучения или приема, сравнивают с пороговым уровнем, отбирая при этом для дальнейшей обработки те сигналы, которые были получены при нахождении БЛА в ГЛ ДН исследуемой антенны, вычисляют двумерную взаимную корреляционную функцию (ДВКФ) поверхности, образованной в трехмерном пространстве значениями мощности превысивших пороговый уровень сигналов и соответствующими им значениями азимута и угла места, и шаблона, образованного в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны в пределах ее ГЛ по уровню половинной мощности и соответствующими им значениями азимута и угла места, находят значения азимута и угла места, при которых ДВКФ максимальна, формируют и сглаживают азимутальным полиномом выборку из значений ДВКФ, взятых по азимуту ее максимума, формируют и сглаживают угломестным полиномом выборку из значений ДВКФ, взятых по углу места ее максимума, определяют азимут и угол места направления ГЛ ДН исследуемой антенны как азимут максимума азимутального полинома и угол места максимума угломестного полинома соответственно, рассчитывают значения азимутального и угломестного сечений двумерной автокорреляционной функции (ДАКФ) поверхности, являющейся шаблоном и образованной в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны и соответствующими им значениями азимута и угла места, рассчитывают коэффициенты согласованности размеров соответствующих сечений ДВКФ и ДАКФ и определяют размеры азимутального и угломестного сечений ГЛ ДН исследуемой антенны по уровню половинной мощности как произведения ширины соответствующих сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности на соответствующие коэффициенты согласованности размеров соответствующих сечений ДВКФ и ДАКФ, а если рассчитанные значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности не соответствует априорно заданным значениям на величину относительной ошибки более установленной, то осуществляют новую итерацию расчетов, начиная с расчета ДВКФ, предварительно взяв в качестве априорно заданных значений - значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности, полученные в результате выполнения последней итерации расчетов, причем расчеты прекращают, когда все относительные ошибки измерения соответствующих параметров ГЛ ДН исследуемой антенны становятся менее заданной величины или знаки разницы между соответствующими заданными и измеренными значениями этих параметров в текущей итерации вычислений меняются на противоположные по сравнению с предыдущей итерацией.
Сопоставительный анализ с прототипом показывает, что предложенный способ обладает другими существенными, новыми отличительными от прототипа признаками. Новыми отличительными признаками заявляемого способа являются:
- согласованная фильтрация принятых сигналов;
- временная селекция принятых сигналов;
- нормировка мощности принятых сигналов в зависимости от дальности, на которой находился БЛА в момент их излучения или приема;
- сравнение нормированных сигналов с порогом и отбор для дальнейшей обработки только тех сигналов, которые были получены при нахождении БЛА в ГЛ ДН исследуемой антенны;
- вычисление ДВКФ поверхности, образованной в трехмерном пространстве значениями мощности превысивших пороговый уровень сигналов и соответствующими им значениями азимута и угла места, и шаблона, образованного в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны в пределах ее ГЛ по уровню половинной мощности и соответствующими им значениями азимута и угла места, определение значений азимута и угла места, при которых ДВКФ максимальна, формирование и сглаживание азимутальным полиномом выборки из значений ДВКФ, взятых по азимуту ее максимума, формирование и сглаживание угломестным полиномом выборки из значений ДВКФ, взятых по углу места ее максимума, определение азимута и угла места направления ГЛ ДН исследуемой антенны как азимута максимума азимутального полинома и угла места максимума угломестного полинома соответственно;
- расчет ДАКФ поверхности, являющейся шаблоном и образованной в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны и соответствующими им значениями азимута и угла места, расчет коэффициентов согласованности размеров соответствующих сечений ДВКФ и ДАКФ и определение размеров азимутального и угломестного сечений ГЛ ДН исследуемой антенны по уровню половинной мощности как произведений ширины соответствующих сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности на соответствующие коэффициенты согласованности размеров соответствующих сечений ДВКФ и ДАКФ;
- проведение новой итерации расчетов, если полученные значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности не соответствует априорно заданным значениям на величину относительной ошибки более установленной, начиная с расчета ДВКФ, предварительно взяв в качестве априорно заданных значений значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности, полученные в результате выполнения последней итерации расчетов, причем расчеты прекращаются, когда все относительные ошибки измерения соответствующих параметров ГЛ ДН исследуемой антенны становятся менее заданной величины или знаки разницы между соответствующими заданными и измеренными значениями этих параметров в текущей итерации вычислений меняются на противоположные по сравнению с предыдущей итерацией.
Отличительные признаки являются существенными, так как каждый из них необходим, а все вместе достаточны для достижения поставленной задачи изобретения, на решение которой направлено заявляемое изобретение.
4. Пояснения к графическим материалам
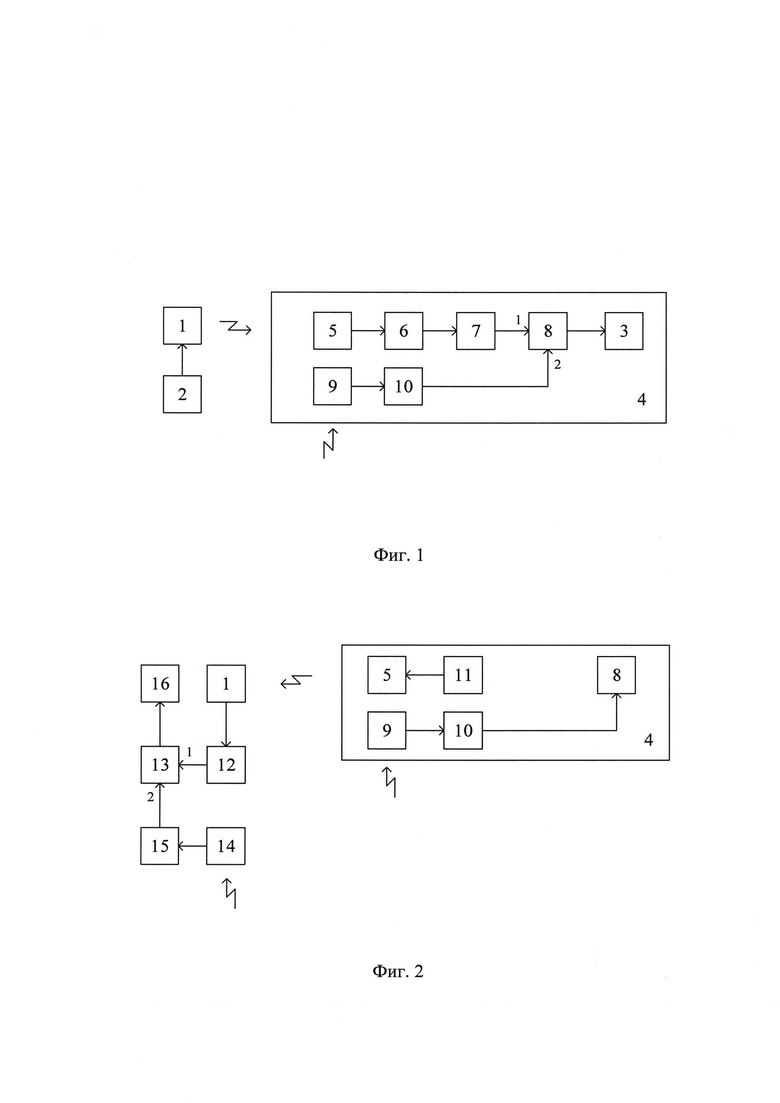
На фиг. 1 приведена схема устройства, которое может быть использовано для измерения параметров ГЛ ДН исследуемой антенны на передачу. Устройство содержит исследуемую антенну 1, передающее устройство 2, бортовой вычислитель 3, БЛА 4, бортовую антенну 5, аттенюатор 6, цифровой приемник 7, бортовой цифровой накопитель 8, антенну спутниковой навигационной системы 9 и приемник спутниковой навигационной системы 10. При этом на земле выход передающего устройства 2 является входом исследуемой антенны 1 связанной по радиоканалу с бортовой антенной 5 БЛА 4, а на борту БЛА 4 бортовая антенна 5, аттенюатор 6 и цифровой приемник 7 соединены последовательно, выход цифрового приемника 7 соединен с первым входом бортового цифрового накопителя 8, антенна спутниковой навигационной системы 9 соединена с входом приемника спутниковой навигационной системы 10, выход которого подключен к второму входу бортового цифрового накопителя 8, выход которого является входом бортового вычислителя 3.
На фиг. 2 приведена схема устройства, которое может быть использовано для измерения параметров ГЛ ДН исследуемой антенны на прием. Устройство содержит исследуемую антенну 1, БЛА 4, бортовую антенну 5, бортовой цифровой накопитель 8, антенну спутниковой навигационной системы 9, приемник спутниковой навигационной системы 10, бортовой генератор 11, цифровой приемник 12, наземный цифровой накопитель 13, антенну спутниковой навигационной системы 14, приемник спутниковой навигационной системы 15 и наземный вычислитель 16. При этом на земле выход исследуемой антенны 1 соединен с входом цифрового приемника 12, выход которого подключен к первому входу наземного цифрового накопителя 13, антенна спутниковой навигационной системы 14 соединена с входом приемника спутниковой навигационной системы 15, выход которого подключен к второму входу наземного цифрового накопителя 13, выход которого является входом наземного вычислителя 16, а на борту БЛА 4 бортовая антенна 5, связанная по радиоканалу с исследуемой антенной 1, подключена к выходу бортового генератора 11, антенна спутниковой навигационной системы 9 соединена с входом приемника спутниковой навигационной системы 10, выход которого подключен к входу бортового цифрового накопителя 8.
На фиг. 3 поясняются перемещения шаблона в пределах углов сектора облета при вычислении значений ДВКФ.
На фиг. 4 поясняются процесс расчета значений ДАКФ.
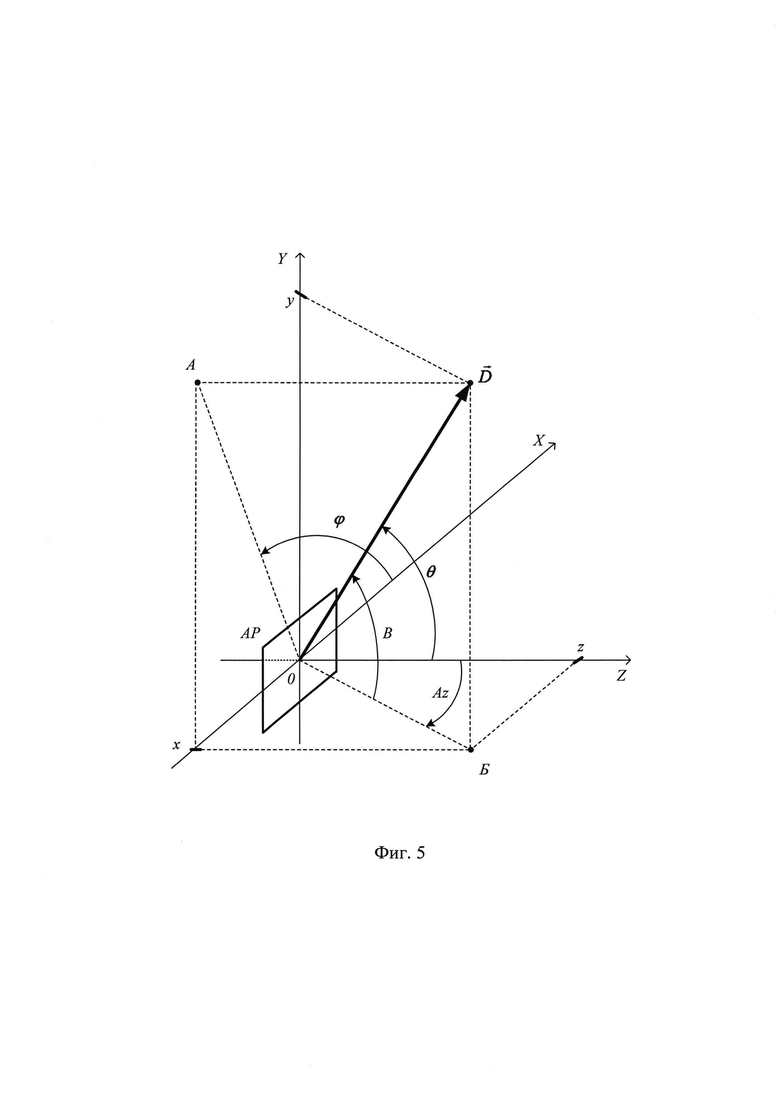
На фиг. 5 поясняется связь азимута Az и угла места В сферической системы координат и углов θ и ϕ вспомогательной сферической системы координат, используемой при расчете шаблона.
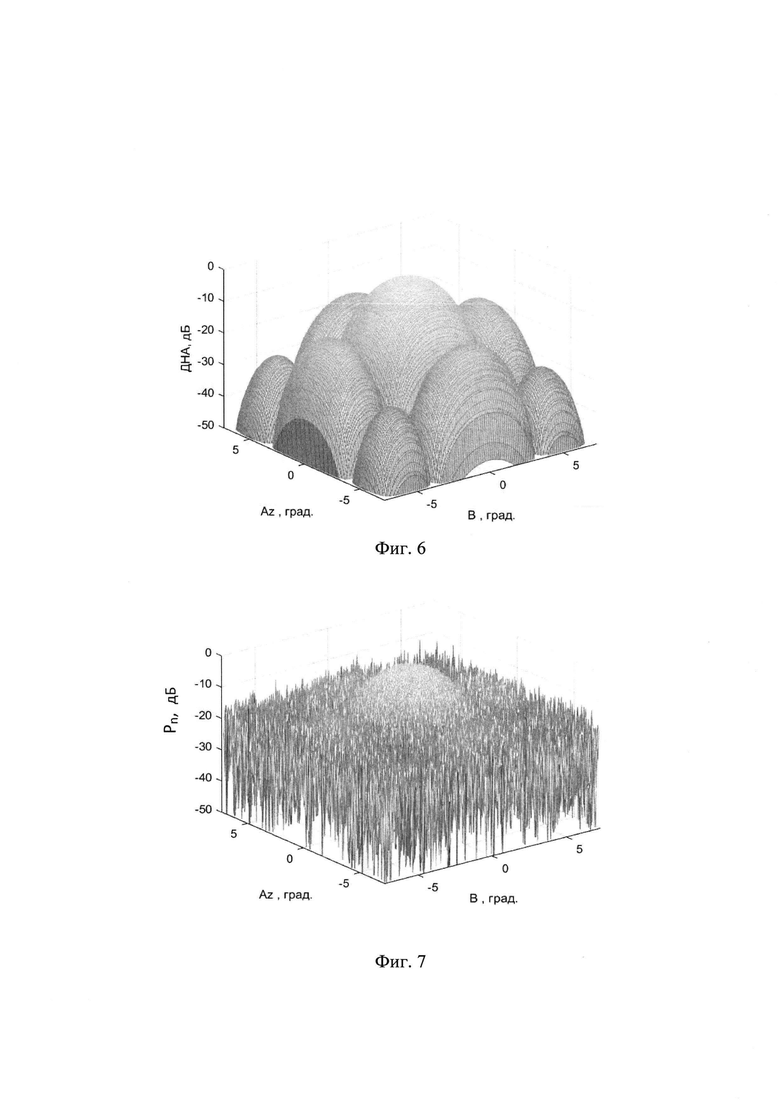
На фиг. 6 проиллюстрирован результат расчета априорно заданной ДН антенной решетки размером 32×32 элементов в предположении, что максимум ГЛ ДН направлен по нормали к антенному полотну 
На фиг. 7 проиллюстрирован результат расчета значений мощностей принятых сигналов Рп с учетом воздействия шумового фона, ошибок позиционирования и погрешностей измерения мощности. Расчет был проведен при априорно заданной ДН антенной решетки размером 32×32 элементов в предположении, что максимум ГЛ ДН направлен по нормали к антенному полотну 
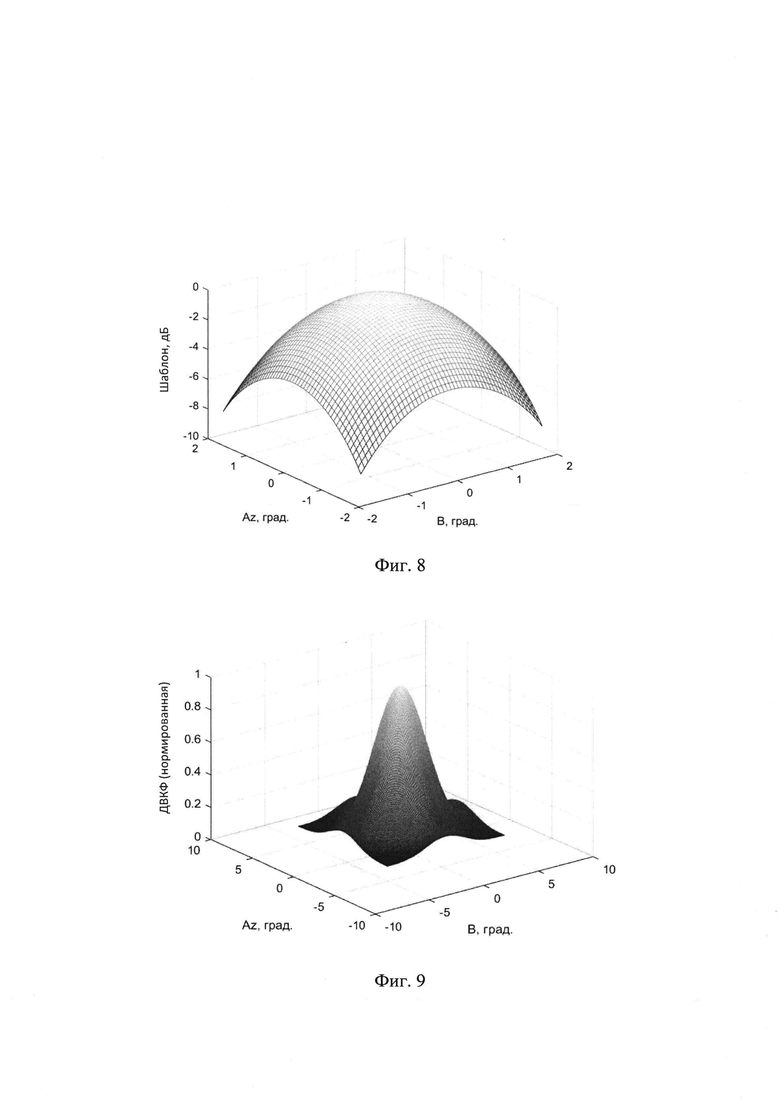
На фиг. 8 проиллюстрирован шаблон, рассчитанный по ГЛ антенной решетки размером 32×32 элемента.
На фиг. 9 проиллюстрирован результат расчета нормированной ДВКФ в предположении, что антенная решетка размером 32×32 элемента, а максимум ДН направлен по нормали к антенному полотну 
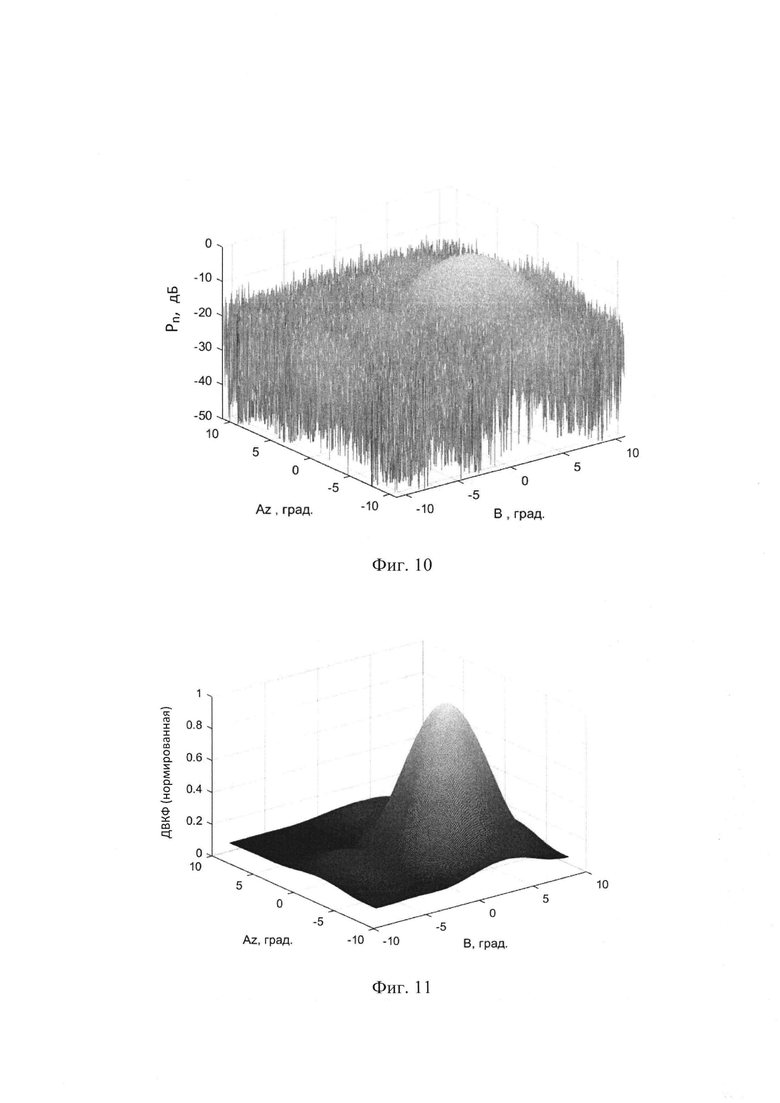
На фиг. 10 проиллюстрирован результат расчета значений мощностей принятых сигналов Рn с учетом воздействия шумового фона, ошибок позиционирования и погрешностей измерения мощности. Расчет был проведен для реальной антенной решетки размером 20×20 элементов при том, что максимум ГЛ ее ДН смещен от нормали к антенному полотну по азимуту на -2°, а по углу места на 3°.
На фиг. 11 проиллюстрирован результат расчета ДВКФ после первой итерации, когда реальная ДН была сформирована антенной решеткой размером 20×20 элементов, ГЛ ДН которой смещен от нормали к антенному полотну по азимуту на -2° и по углу места на 3°, а шаблон был рассчитан по априорно заданной ДН антенной решетки размером 32×32 элемента, ГЛ ДН которой направлен по нормали.
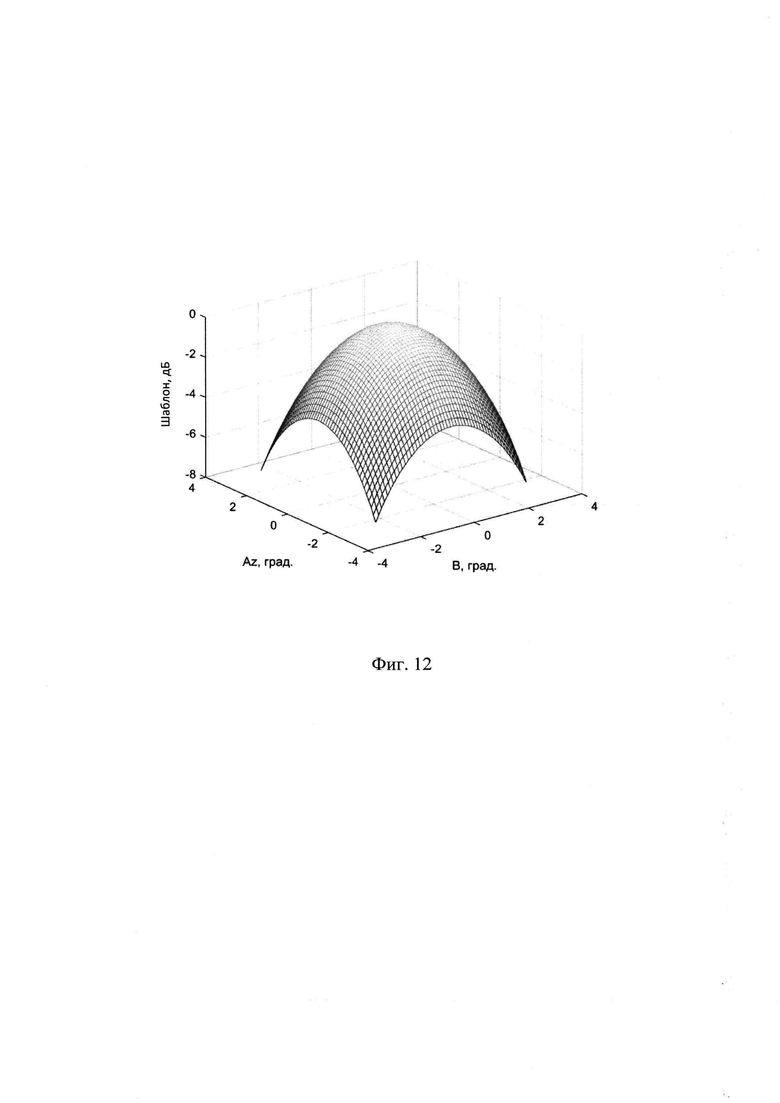
На фиг. 12 иллюстрируется результат расчета шаблона перед второй итерацией.
5. Осуществление изобретения
БЛА совершает облет ограниченного углового сектора, центр которого соответствует априорно заданному направлению максимума неподвижной ДН исследуемой антенны.
В режиме измерения параметров ГЛ ДН на передачу (фиг. 1) сигналы, излучаемые исследуемой антенной 1, принимают на борту БЛА 4 бортовой антенной 5, ослабляют аттенюатором 6, осуществляют их полосовую фильтрацию, разделяют на квадратурные составляющие и оцифровывают в цифровом приемнике 7 и записывают оцифрованные сигналы вместе с временем их приема в бортовой цифровой накопитель 8 подключенный к бортовому вычислителю 3, рассчитывающему ДН в режиме передачи сигналов исследуемой антенной. Полученные посредством антенны спутниковой навигационной системы 9 и приемника спутниковой навигационной системы 10 текущие геодезические координаты БЛА 4 вместе с временем также записывают в бортовой цифровой накопитель 8.
В режиме измерения параметров ГЛ ДН на прием (фиг. 2) сигналы, формируемые бортовым генератором 11, излучают бортовой антенной 5 с борта БЛА 4 и принимают исследуемой антенной 1, осуществляют их полосовую фильтрацию, разделяют на квадратурные составляющие, оцифровывают в цифровом приемнике 12 и записывают оцифрованные сигналы в наземный цифровой накопитель 13. Время приема этих сигналов, полученное посредством антенны спутниковой навигационной системы 14 и приемника спутниковой навигационной системы 15, также записывают в наземный цифровой накопитель 13, подключенный к наземному вычислителю 16, рассчитывающему ДН в режиме приема сигналов исследуемой антенной. Причем время излучения сигналов с борта БЛА 4, а также его геодезические координаты на это время, полученные посредством антенны спутниковой навигационной системы 9 и приемника спутниковой навигационной системы 10, записывают в бортовой цифровой накопитель 8.
После окончания полета бортовой цифровой накопитель 8 подключают к наземному вычислителю 16 для расчета ДН в режиме приема сигналов исследуемой антенны, осуществляют временную привязку сигналов, принятых исследуемой антенной 1 в режиме приема, и геодезических координат БЛА 4 на момент их излучения, и затем выполняют одинаковые операции как при расчете ДН исследуемой антенны 1 на прием, осуществляемые в наземном вычислителе 16, так и при расчете ее ДН на передачу, осуществляемые в бортовом вычислителе 3, а именно: пересчитывают геодезические координаты БЛА, соответствующие времени излучения или приема этих сигналов, в сферическую систему координат, центр которой совпадает с фазовым центром исследуемой антенны, осуществляют согласованную фильтрацию записанных в соответствующем цифровом накопителе сигналов, осуществляют их детектирование и временную селекцию, нормируют их мощность в зависимости от дальности, на которой находился БЛА в момент их излучения или приема, сравнивают с пороговым уровнем, отбирая при этом для дальнейшей обработки те сигналы, которые были получены при нахождении БЛА в ГЛ ДН исследуемой антенны, вычисляют ДВКФ поверхности, образованной в трехмерном пространстве значениями мощности превысивших пороговый уровень сигналов и соответствующими им значениями азимута и угла места, и шаблона, образованного в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны в пределах ее ГЛ по уровню половинной мощности и соответствующими им значениями азимута и угла места, а затем находят значения азимута и угла места, при которых ДВКФ максимальна, определяют азимут направления максимума ГЛ ДН исследуемой антенны и угол места направления максимума ГЛ ДН исследуемой антенны, рассчитывают ДАКФ поверхности, являющейся шаблоном и образованной в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны и соответствующими им значениями азимута и угла места, а затем определяют размеры азимутального и угломестного сечений ГЛ ДН исследуемой антенны по уровню половинной мощности как произведения ширины соответствующих сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности на соответствующие коэффициенты согласованности размеров соответствующих сечений ДВКФ и ДАКФ и если рассчитанные значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности не соответствует априорно заданным значениям на величину относительной ошибки более установленной, то осуществляют новую итерацию расчетов, начиная с расчета ДВКФ, предварительно взяв в качестве априорно заданных значений значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности, полученные в результате выполнения последней итерации расчетов, причем расчеты прекращают, когда все относительные ошибки измерения соответствующих параметров ГЛ ДН исследуемой антенны становятся менее заданной величины или знаки разницы между соответствующими заданными и измеренными значениями этих параметров в текущей итерации вычислений меняются на противоположные по сравнению с предыдущей итерацией.
Пересчет геодезических координат БЛА в сферические осуществляется последовательно: координаты БЛА из геодезической системы координат (СК) пересчитываются в геоцентрическую СК, геоцентрические координаты пересчитываются в топоцентрическую прямоугольную СК, и затем топоцентрические прямоугольные координаты пересчитываются в сферическую СК.
Пересчет из геодезической СК в геоцентрическую СК проводится по формулам (1) [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Принят и введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12.09.2017 г. №1055-ст.]:



где ϕБЛА - широта точки нахождения БЛА; λ=λА - λБЛА - долгота БЛА относительная; λБЛА - долгота точки нахождения БЛА; λА - долгота точки фазового центра исследуемой антенны; HБЛА - высота точки нахождения БЛА;  - радиус кривизны первого вертикала; аз - 6378,1365 км - экваториальный радиус (большая полуось эллипсоида вращения Земли;
- радиус кривизны первого вертикала; аз - 6378,1365 км - экваториальный радиус (большая полуось эллипсоида вращения Земли;  - эксцентриситет меридиана; bз=aз(1 - ƒз) - малая полуось эллипсоида вращения Земли; ƒз=1/298,2564151 - сжатие Земного эллипсоида.
- эксцентриситет меридиана; bз=aз(1 - ƒз) - малая полуось эллипсоида вращения Земли; ƒз=1/298,2564151 - сжатие Земного эллипсоида.
При таком пересчете плоскость XГ0ZГ проходит через фазовый центр исследуемой антенны. Ось 0ZГ направлена к Условному земному полюсу [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Принят и введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12.09.2017 г. №1055-ст.], а ось 0YГ дополняет СК до правой.
Пересчет из геоцентрической СК в топоцентрическую прямоугольную СК проводится в соответствии с формулой (2) [Ю.С. Саврасов. Алгоритмы и программы в радиолокации. М.: Радио и связь, 1985]:

где  =(ХТ, YT, ZT)Т - вектор-столбец координат в топоцентрической прямоугольной СК; |AТ| - матрица направляющих косинусов с элементами
=(ХТ, YT, ZT)Т - вектор-столбец координат в топоцентрической прямоугольной СК; |AТ| - матрица направляющих косинусов с элементами
a11=- sin АА sin ϕА, a12=- cos AA, a13=sin AA cos ϕA,
a21=cos ϕA, a22=0, a23=sin ϕA,
а31=- соs AA sin ϕA, a32=sin AA, а33=cos AA cos ϕA;
AA - азимут оси 0ZТ, отсчитываемый от направления на север по часовой стрелке;  - вектор смещения центра топоцентрической СК относительно центра геоцентрической СК с элементами аX=ΔА sin АА sin ϕА, aY=-(rA+ΔA cos ϕA), aZ=ΔA cos АА sin ϕА;
- вектор смещения центра топоцентрической СК относительно центра геоцентрической СК с элементами аX=ΔА sin АА sin ϕА, aY=-(rA+ΔA cos ϕA), aZ=ΔA cos АА sin ϕА;  - расстояние от центра эллипсоида вращения до фазового центра антенны; ΔA=rB sin BA (ctg BA - ctg ϕA);
- расстояние от центра эллипсоида вращения до фазового центра антенны; ΔA=rB sin BA (ctg BA - ctg ϕA);  - расстояние от центра эллипсоида вращения Земли до его поверхности при заданной геоцентрической широте BA; ВА=arctg[tg ϕA(1 - ƒз)2] - геоцентрическая широта.
- расстояние от центра эллипсоида вращения Земли до его поверхности при заданной геоцентрической широте BA; ВА=arctg[tg ϕA(1 - ƒз)2] - геоцентрическая широта.
Центр топоцентрической прямоугольной СК находится в фазовом центре исследуемой антенны, ось 0YT направлена в зенит по местной нормали к поверхности Земли, оси 0ХТ и 0ZT лежат в плоскости местного горизонта и вместе с осью 0YT образуют правую СК, причем, ось 0ZТ лежит в плоскости нормали к антенному полотну/электрической оси антенны.
Пересчет из топоцентрической прямоугольной СК в сферическую СК проводится в соответствии с формулами (3) [Ю.С. Саврасов. Алгоритмы и программы в радиолокации. М: Радио и связь, 1985]:


Согласованную фильтрацию осуществляют умножением входного потока оцифрованных квадратур сигналов на импульсную характеристику, которая является зеркальным отображением сигналов [Теоретические основы радиолокации: Учебное пособие для вузов / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970, стр. 112], излучаемых либо исследуемой антенной, либо - бортовой. Согласованная фильтрация является стандартной процедурой при обработке сигналов и позволяет получить максимальное отношение «сигнал/шум» [Теоретические основы радиолокации: Учебное пособие для вузов / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970, стр. 118], тем самым повышая точность измерений.
Осуществляя временную селекцию сигналов, выбирают для дальнейшей обработки сигналы с периодом следования, равным периоду излучения сигналов либо исследуемой антенной, либо - бортовой. Тем самым исключаются сигналы посторонних источников с другим периодом следования, что повышает точность измерений.
После детектирования сигналов нормировку мощности сигналов в зависимости от дальности, на которой находился БЛА в момент их излучения или приема, осуществляют по формуле (4):

где Dзад. - удаление БЛА от исследуемой антенны, заданное для проведения измерений; Dизм.,n - реальное удаление БЛА от исследуемой антенны при приеме n-го сигнала; Рn - мощность n-го сигнала; n=1…N, N - количество сигналов, принятых за все время облета БЛА исследуемой антенны.
Нормировкой по формуле (4) уменьшают флуктуации мощности принятых сигналов, возникающие при случайных отклонениях траектории движения БЛА от заданной, и таким образом, повышают точность измерений. Случайные отклонения траектории могут возникать, например, при турбулентностях воздушных масс на траектории полета.
Для отбора сигналов, которые были получены при нахождении БЛА в ГЛ ДН исследуемой антенны, осуществляется сравнение нормированных сигналов с пороговым уровнем согласно формуле (5):

где П=Рнор.,mах /T - уровень порога; Рнор.,max - максимальная нормированная мощность сигналов, принятых сигналов за все время облета БЛА исследуемой антенны; Т - пороговый множитель, значение которого обеспечивает дальнейшую обработку только тех сигналов, которые были приняты, когда БЛА находился в ГЛ ДН исследуемой антенны.
Значение Т может быть взято равным, например, 10. Это позволяет исключать из дальнейшей обработки малоинформативные сигналы и, возможно, посторонние сигналы, мощность которых на 10 дБ меньше максимальной мощности сигналов, принятых за время облета, что повышает точность измерений.
В результате вышеперечисленных операций послеполетной обработки сигналов и координатной информации образуют массив данных, каждый элемент которого содержит, значение мощности сигнала, а также значения азимута и угла места БЛА 4 в момент приема этого сигнала исследуемой антенной 1 в режиме измерения параметров ГЛ ДН на прием или бортовой антенной 5 в режиме измерения параметров ГЛ ДН на передачу. Значения ДВКФ рассчитывают по формуле (6) [И.С. Гоноровский. Радиотехнические цепи и сигналы. М.: Радио и связь, 1986, стр. 70]:

где  и
и  - азимут и угол места очередного углового направления, для которого рассчитывают значение ДВКФ; Azнач. и Bнач. - начальные границы ограниченного углового сектора по азимуту и углу места соответственно;
- азимут и угол места очередного углового направления, для которого рассчитывают значение ДВКФ; Azнач. и Bнач. - начальные границы ограниченного углового сектора по азимуту и углу места соответственно;  и
и  - размеры соответственно азимутального и угломестного сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности;
- размеры соответственно азимутального и угломестного сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности;  и
и  - дискреты расчета ДВКФ по азимуту и углу места соответственно, причем их значения выбирают пропорционально предполагаемым размерам соответствующих сечений ДН исследуемой антенны и так, чтобы обеспечить получение не менее одного сигнала с одной дискреты; ΔAzC и ΔВС - азимутальный и угломестный размеры сектора облета соответственно; i=1…I, I - количество направлений по азимуту для расчета значений ДВКФ; j=1…J, J - количество направлений по углу места для расчета значений ДВКФ; Рнор.,k (Azk,Bk) - мощность нормированного и превысившего уровень порога П сигнала, принятого в момент нахождения БЛА на азимуте Azk и угле места Вk, значения которых соответственно удовлетворяют условиям
- дискреты расчета ДВКФ по азимуту и углу места соответственно, причем их значения выбирают пропорционально предполагаемым размерам соответствующих сечений ДН исследуемой антенны и так, чтобы обеспечить получение не менее одного сигнала с одной дискреты; ΔAzC и ΔВС - азимутальный и угломестный размеры сектора облета соответственно; i=1…I, I - количество направлений по азимуту для расчета значений ДВКФ; j=1…J, J - количество направлений по углу места для расчета значений ДВКФ; Рнор.,k (Azk,Bk) - мощность нормированного и превысившего уровень порога П сигнала, принятого в момент нахождения БЛА на азимуте Azk и угле места Вk, значения которых соответственно удовлетворяют условиям
F(Azk - Azi, Bk - Bi) - модуль априорно заданной ДН исследуемой антенны по мощности в направлении азимута Azk и угла места Вk; k - 1…Ki,j, Ki,j - общее количество сигналов, принятых, когда БЛА находился внутри углового сектора  , центр которого направлен на азимут Azi и угол места Вj; Ki,j<М, М - общее количество нормированных сигналов, превысивших уровень порога П.
, центр которого направлен на азимут Azi и угол места Вj; Ki,j<М, М - общее количество нормированных сигналов, превысивших уровень порога П.
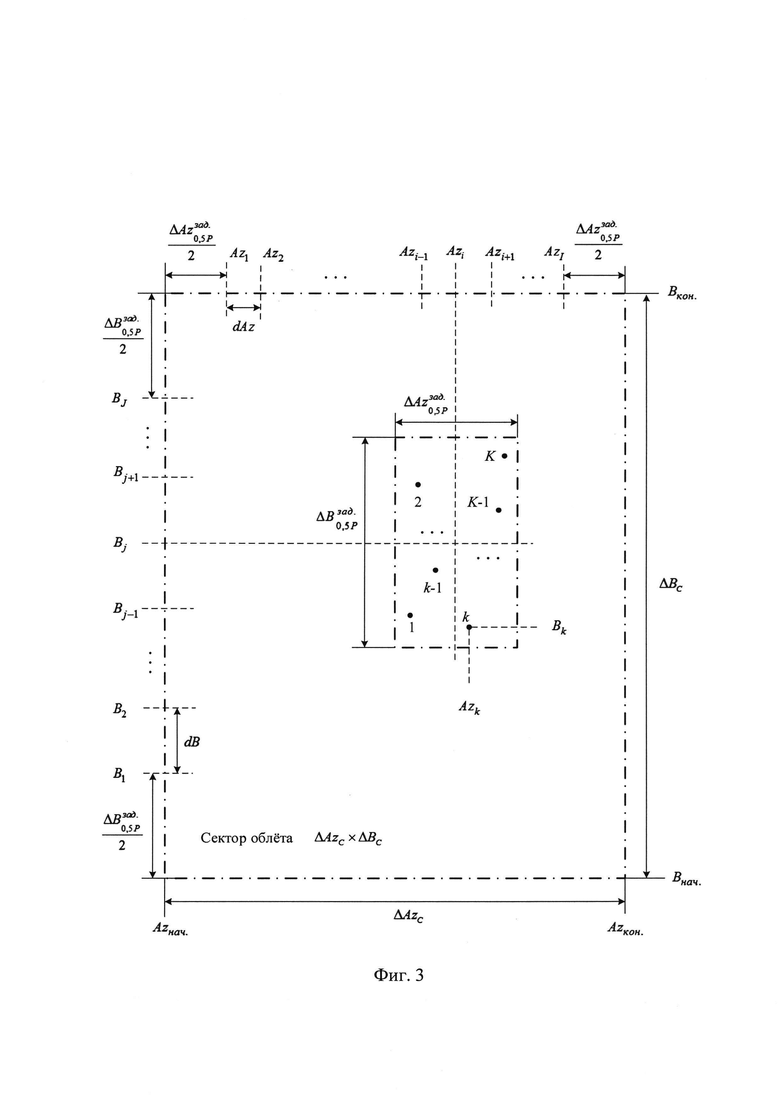
При вычислении значений ДВКФ организуют обход шаблоном сектора ΔAzC×ΔBC по строкам, что поясняется графически на фиг. 3, где показан азимутально-угломестный сектор размером ΔAzC×ΔВС с границами по азимуту от начального Аzнач. до конечного азимута Azкон. и от начального Внач. до конечного угла места Вкон. Первое значение ДВКФ в первой строке S(Az1,B1) получают для азимута  и угла места
и угла места  . При этом для расчета ДВКФ отбирают сигналы, попадающие в границы шаблона - прямоугольника
. При этом для расчета ДВКФ отбирают сигналы, попадающие в границы шаблона - прямоугольника  с центром в точке (Az1, В1). Для расчета второго значения ДВКФ в первой строке S(Az2,B1) шаблон (прямоугольник
с центром в точке (Az1, В1). Для расчета второго значения ДВКФ в первой строке S(Az2,B1) шаблон (прямоугольник  ) сдвигают по азимуту так, что его центр перемещают в точку (Az2, В1), где Az2=Az1+dAz, и т.д. Последнее значение ДВКФ в первой строке S(AzI,B1) получают в точке (AzI, В1), где
) сдвигают по азимуту так, что его центр перемещают в точку (Az2, В1), где Az2=Az1+dAz, и т.д. Последнее значение ДВКФ в первой строке S(AzI,B1) получают в точке (AzI, В1), где  Расчет ДВКФ во второй строке начинают с точки (Az1, В2), где B2=B1+dB, а заканчивают в точке (AzI, В2). Расчет в последней строке начинают с точки (Az1, BJ) где
Расчет ДВКФ во второй строке начинают с точки (Az1, В2), где B2=B1+dB, а заканчивают в точке (AzI, В2). Расчет в последней строке начинают с точки (Az1, BJ) где  , и заканчивают в точке (AzI, BJ). Таким образом получают I×J значений ДВКФ.
, и заканчивают в точке (AzI, BJ). Таким образом получают I×J значений ДВКФ.
Находят значения азимута и угла места, при которых значение ДВКФ максимально, т.е. значения Azd и Вl из условия S(Azd,Bl)=maxS(Az,B). Формируют две выборки: угломестную выборку

и азимутальную выборку

Сглаживают каждую выборку методом наименьших квадратов, как например, показано в [Е.С. Вентцель. Теория вероятностей. М: Наука, 1969, стр. 354-356]. При реализации вычислительного процесса в среде MATLAB можно воспользоваться функцией polyfit(x,у,n), возвращающей вектор коэффициентов полинома р(х) степени n, который с наименьшей среднеквадратичной погрешностью аппроксимирует функцию у(х) [В.П. Дьяконов. MATLAB 7. */R2006/R2007: Самоучитель. - М.: ДМК Пресс, 2008, стр. 465]. Здесь функция y - угломестная выборка (7) или азимутальная выборка (8), а значения аргумента х - соответствующие значения угла места или азимута. Получают два сглаживающих полинома степени q : азимутальный полином по формуле (9)

и угломестный полином по формуле (10)

где a0,a1,…,aq-1, aq и b0, b1,…, bq-1, bq - коэффициенты соответствующих полиномов.
Азимут и угол места направления максимума ГЛ ДН исследуемой антенны 1  и
и  определяют из условий (11):
определяют из условий (11):


Поиск максимумов полиномов (11) может быть осуществлен методом «золотого сечения» [В.Ф. Формалев, Д.Л. Ревизников. Численные методы. М.: ФИЗМАТЛИТ, 2004, стр. 200-203]. При реализации вычислительного процесса в среде MATLAB можно воспользоваться функцией fminbnd(ƒun,x1,x2), которая возвращает значение аргумента х, при котором функция ƒun(x) минимальна [В.П. Дьяконов. MATLAB 7. */R2006/R2007: Самоучитель. - М.: ДМК Пресс, 2008, с. 398]. Здесь при нахождении  функция ƒun(x)=-G(Az) и x1=Azd-1, x2=Azd+l, а при нахождении
функция ƒun(x)=-G(Az) и x1=Azd-1, x2=Azd+l, а при нахождении  функция ƒun(x)=-G(B) и x1=Bl-1, х2=Вl+1.
функция ƒun(x)=-G(B) и x1=Bl-1, х2=Вl+1.
Выборку значений азимутального сечения ДАКФ априорно заданной ДН исследуемой антенны рассчитывают по формуле (12):
где F(.) - модуль априорно заданной ДН исследуемой антенны по мощности;  и
и  - измеренные значения азимута и угла места направления максимума ГЛ ДН исследуемой антенны;
- измеренные значения азимута и угла места направления максимума ГЛ ДН исследуемой антенны;
 - пределы интегрирования;
- пределы интегрирования;
 - количество направлений по азимуту для расчета значений азимутального сечения ДАКФ;
- количество направлений по азимуту для расчета значений азимутального сечения ДАКФ;  - азимут начала азимутального сечения ДАКФ;
- азимут начала азимутального сечения ДАКФ;  - азимут конца азимутального сечения ДАКФ.
- азимут конца азимутального сечения ДАКФ.
Выборку значений угломестного сечения ДАКФ априорно заданной ДН исследуемой антенны рассчитывают по формуле (13):
где  - пределы интегрирования;
- пределы интегрирования;
j=1…JA,  - количество направлений по углу места для расчета значений угломестного сечения ДАКФ;
- количество направлений по углу места для расчета значений угломестного сечения ДАКФ;  - угол места начала угломестного сечения ДАКФ;
- угол места начала угломестного сечения ДАКФ;  - угол места конца угломестного сечения ДАКФ.
- угол места конца угломестного сечения ДАКФ.
Процесс вычисления значений ДАКФ поясняется на фиг. 4. На фиг. 4 большой прямоугольник, обозначенный штрих-пунктирной линией, ограничивает азимутально-угломестный сектор расчета ДАКФ, а малый прямоугольник, обозначенный также штрих-пунктирной линией, определяет непосредственно область интегрирования по формулам (12) и (13) (в данном случае для расчета значения  При расчете каждого значения азимутального сечения ДАКФ, от первого значения
При расчете каждого значения азимутального сечения ДАКФ, от первого значения  до последнего значения
до последнего значения  пределы интегрирования последовательно смещаются по азимуту вдоль линии
пределы интегрирования последовательно смещаются по азимуту вдоль линии  с дискретностью dAz. А для расчета каждого значения угломестного сечения ДАКФ, от первого значения
с дискретностью dAz. А для расчета каждого значения угломестного сечения ДАКФ, от первого значения  до последнего значения
до последнего значения  , пределы интегрирования последовательно смещаются по углу места вдоль линии
, пределы интегрирования последовательно смещаются по углу места вдоль линии  с дискретностью dB.
с дискретностью dB.
Выборки  и
и  сглаживают методом наименьших квадратов [Е.С. Вентцель. Теория вероятностей. М.: Наука, 1969, стр. 354-3 56], получая два сглаживающих полинома степени q - азимутальный полином GF(Az)=bqAzq+bq-1Azq-1+…+b1Az+b0 и угломестный полином GF(B)=aqBq+aq-1Bq-1+…+axB+a0, где a0, a1,…, aq-1, aq и b0, b1,…, bq-1, bq - коэффициенты соответствующих полиномов.
сглаживают методом наименьших квадратов [Е.С. Вентцель. Теория вероятностей. М.: Наука, 1969, стр. 354-3 56], получая два сглаживающих полинома степени q - азимутальный полином GF(Az)=bqAzq+bq-1Azq-1+…+b1Az+b0 и угломестный полином GF(B)=aqBq+aq-1Bq-1+…+axB+a0, где a0, a1,…, aq-1, aq и b0, b1,…, bq-1, bq - коэффициенты соответствующих полиномов.
Коэффициенты согласованности размеров азимутальных и угломестных сечений ДВКФ соответственно размерам азимутальных и угломестных сечений ДАКФ определяют по формулам (14):


где Az(1), Az(2), B(1) и B(2) - азимутальные и угломестные границы соответствующих сечений ДВКФ, определяют соответственно из условий:
и
 - азимутальные и угломестные границы соответствующих сечений ДАКФ, определяют соответственно из условий:
- азимутальные и угломестные границы соответствующих сечений ДАКФ, определяют соответственно из условий:
и
Значения Az(1), Az{2), В(1) и В(2), а также и значения  и
и  могут быть найдены методом «золотого сечения» [В.Ф. Формалев, Д.Л. Ревизников. Численные методы. М.: ФИЗМАТЛИТ, 2004, стр. 200-203].
могут быть найдены методом «золотого сечения» [В.Ф. Формалев, Д.Л. Ревизников. Численные методы. М.: ФИЗМАТЛИТ, 2004, стр. 200-203].
Размеры азимутального и угломестного сечений ГЛ ДН исследуемой антенны по уровню половинной мощности определяют по формулам (15):


После вычисления осуществляют проверку соответствия параметров, рассчитанных по формулам (11) и (15), параметрам шаблона - априорно заданным направлению ГЛ ДН исследуемой антенны и размерам его азимутального и угломестного сечений по уровню половинной мощности. Для этого рассчитывают относительные ошибки измерения соответствующих параметров и сравнивают их с заданными порогами по формулам (16):




где  и
и  - азимут и угол места априорно заданного направления максимума ДН исследуемой антенны;
- азимут и угол места априорно заданного направления максимума ДН исследуемой антенны;  заданные пороги относительных ошибок измерения соответствующих параметров; i=1, 2 … - номер итерации вычислений параметров ГЛ ДН исследуемой антенны.
заданные пороги относительных ошибок измерения соответствующих параметров; i=1, 2 … - номер итерации вычислений параметров ГЛ ДН исследуемой антенны.
Процесс расчета ДВКФ можно сравнить по аналогии с последетекторным накоплением некогерентной пачки сигналов, когда отношение «сигнал/шум» растет по мере увеличения накопленных импульсов поскольку полезная мощность накапливается быстрее, чем мощность шумов [Теоретические основы радиолокации: Учебное пособие для вузов / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970, стр. 157]. И поэтому применение ДВКФ при определении параметров ГЛ ДН исследуемой антенны позволяет увеличить точность измерений за счет снижения влияния шумовых искажений.
Расчеты прекращают, когда все относительные ошибки, рассчитанные по формулам (16), становятся менее заданной величины. Расчеты также прекращают, если знаки разницы между соответствующими заданными и измеренными значениями измеряемых параметров ГЛ ДН исследуемой антенны в текущей итерации вычислений меняются на противоположные по сравнению с предыдущей итерацией, т.е. когда выполняются условия (17):




Прекращение итераций по условиям (17) физически означает, что достигнута потенциальная точность предлагаемого способа, когда получаемые в смежных итерациях значения параметров ГЛ ДН исследуемой антенны начинают колебаться около своих математических ожиданий.
6. Оценка работоспособности предлагаемого способа
Оценка работоспособности предлагаемого способа определения параметров ГЛ ДН исследуемой антенны была проведена с использованием математической модели. Исходные данные для моделирования: исследуемая антенна является плоской антенной решеткой; количество столбцов излучателей NAz - 32; количество строк излучателей NB=32; расстояние между столбцами излучателей равно половине длины волны, т.е. dAz=λ/2; расстояние между строками излучателей равно половине длины волны, т.е. dВ=λ/2; реально функционирует только часть антенной решетки размером  распределение излучаемой мощности по элементам решетки равномерное в обеих плоскостях; размеры дискрет для расчета ДВКФ по азимуту и углу места одинаковы dAz=dB и составляют 0,073°; заданное отклонение максимума ГЛ ДН исследуемой антенны от нормали по азимуту на угол
распределение излучаемой мощности по элементам решетки равномерное в обеих плоскостях; размеры дискрет для расчета ДВКФ по азимуту и углу места одинаковы dAz=dB и составляют 0,073°; заданное отклонение максимума ГЛ ДН исследуемой антенны от нормали по азимуту на угол  и по углу места на
и по углу места на  реальное отклонение максимума ГЛ ДН исследуемой антенны от нормали по азимуту на угол Azmax=-2° и по углу места на Вmах=3°; измерения мощности внутри ячеек на сетке «азимут-угол места» располагаются случайным образом; уровень шума Рш[дБ]=-20 дБ от максимального уровня ГЛ реальной ДНА; относительная погрешность измерения мощности сигналов ΔPизм.[%]=2%; максимальные заданные плоскостные ошибки позиционирования БЛА ΔDmax=3 м; максимальные заданные ошибки позиционирования БЛА по высоте ΔHmax=1 м; БЛА совершает облет исследуемой антенны на удалении Dзад.=1400 м и на высоте Нзад.=1000 м; среднеквадратические ошибки позиционирования БЛА в сферической СК составляют по азимуту
реальное отклонение максимума ГЛ ДН исследуемой антенны от нормали по азимуту на угол Azmax=-2° и по углу места на Вmах=3°; измерения мощности внутри ячеек на сетке «азимут-угол места» располагаются случайным образом; уровень шума Рш[дБ]=-20 дБ от максимального уровня ГЛ реальной ДНА; относительная погрешность измерения мощности сигналов ΔPизм.[%]=2%; максимальные заданные плоскостные ошибки позиционирования БЛА ΔDmax=3 м; максимальные заданные ошибки позиционирования БЛА по высоте ΔHmax=1 м; БЛА совершает облет исследуемой антенны на удалении Dзад.=1400 м и на высоте Нзад.=1000 м; среднеквадратические ошибки позиционирования БЛА в сферической СК составляют по азимуту  по углу места
по углу места  и по дальности
и по дальности  заданная относительная погрешность измерения параметров ГЛ ДН исследуемой антенны не более 2%.
заданная относительная погрешность измерения параметров ГЛ ДН исследуемой антенны не более 2%.
Расчет значений мощности сигналов с учетом случайных составляющих осуществлялся внутри прямоугольника ΔAzC × ΔВC с шагом по азимуту и углу места dAz и dB. Моделирование значений мощности сигналов с учетом ошибки позиционирования и шумовой составляющей осуществлялось по формуле (18) [В.В. Быков. Цифровое моделирование в статистической радиотехнике. М.: Сов. радио, 1971, стр. 25]:

где  - мощность сигнала, принятого с углового направления (Azn,Bn) с учетом ΔD - случайного отклонения БЛА от заданной траектории движения по дальности; F(Azn - Azmax,Bn - Bmax) - модуль реальной ДН исследуемой антенны по мощности в направлении точки (Azn,Bn) на плоскости азимут-угол места, причем ее максимум направлен на точку (Azmax,Bmax); n=1… NC;
- мощность сигнала, принятого с углового направления (Azn,Bn) с учетом ΔD - случайного отклонения БЛА от заданной траектории движения по дальности; F(Azn - Azmax,Bn - Bmax) - модуль реальной ДН исследуемой антенны по мощности в направлении точки (Azn,Bn) на плоскости азимут-угол места, причем ее максимум направлен на точку (Azmax,Bmax); n=1… NC;  - общее число моделируемых сигналов;
- общее число моделируемых сигналов;  randn(0,1) - датчик нормальных случайных чисел с нулевым математическим ожиданием и единичной дисперсией; x1=σшrandn(0,1) - шумовой сигнал первой квадратуры; х2=σшrandn(0,1) - шумовой сигнал второй квадратуры;
randn(0,1) - датчик нормальных случайных чисел с нулевым математическим ожиданием и единичной дисперсией; x1=σшrandn(0,1) - шумовой сигнал первой квадратуры; х2=σшrandn(0,1) - шумовой сигнал второй квадратуры;  - заданная дисперсия шума.
- заданная дисперсия шума.
Для расчета модуля реальной ДН исследуемой антенны использовалась вспомогательная сферическая система с углами θ и ϕ, связь которой с азимутальным углом Az и углом места В поясняется на фиг. 5. Здесь XYZ -прямоугольная СК, начало которой соответствует фазовому центру антенной решетки, ось Z направлена в переднюю полусферу по нормали, ось Y направлена параллельно столбцам вибраторов вверх, ось X направлена горизонтально параллельно строкам вибраторов и дополняет систему до правой. Точка А - проекция конца радиус-вектора  на плоскость X0Y, точка Б - проекция конца радиус-вектора
на плоскость X0Y, точка Б - проекция конца радиус-вектора  на плоскость X0Z, азимут Az отсчитывается от оси Z до проекции радиус-вектора
на плоскость X0Z, азимут Az отсчитывается от оси Z до проекции радиус-вектора  на плоскость X0Z, угол места В отсчитывается от проекции радиус-вектора
на плоскость X0Z, угол места В отсчитывается от проекции радиус-вектора  на плоскость X0Z до радиус-вектора
на плоскость X0Z до радиус-вектора  , меридиональный угол θ отсчитывается от оси Z до радиус-вектора
, меридиональный угол θ отсчитывается от оси Z до радиус-вектора  , азимутальный угол ϕ отсчитывается от оси X до проекции радиус-вектора
, азимутальный угол ϕ отсчитывается от оси X до проекции радиус-вектора  на плоскость X0Y. Переход от углов Az и В к углам θ, ϕ осуществляется (при единичном размере радиус-вектора
на плоскость X0Y. Переход от углов Az и В к углам θ, ϕ осуществляется (при единичном размере радиус-вектора  ) по формулам (19):
) по формулам (19):

Модуль реальной ДН исследуемой антенны по мощности при условии всенаправленных излучателей решетки рассчитывается по формуле (20) [Устройства СВЧ и антенны. Проектирование фазированных антенных решеток: Учеб. пособие для вузов / Под ред. Д.И. Вознесенского. М.: Радиотехника, 2012, стр. 41]:

где 
- множитель направленности эквивалентной линейной антенной решетки, параллельной оси X;

- множитель направленности эквивалентной линейной антенной решетки, параллельной оси Y; пара углов θn, ϕn соответствует паре углов Azn,Вn, а пара θmах, ϕmax - паре Аzmaх, Bmах.
В формуле (20) значения азимута меняются от Az1=Аzнач. до  а значения угла места от В1=Внач до BN=Вкон.
а значения угла места от В1=Внач до BN=Вкон.
Окончательный расчет значений мощности сигналов с учетом инструментальной ошибки осуществлялся по формуле (21):

где  - среднеквадратическая ошибка измерения мощности (по правилу «трех сигм»);
- среднеквадратическая ошибка измерения мощности (по правилу «трех сигм»);  - максимальная ошибка измерения мощности для n-го сигнала.
- максимальная ошибка измерения мощности для n-го сигнала.
Ошибки позиционирования вводились путем перепривязки n-го сигнала к новым координатам по формулам (22):


После этого подготовленный массив данных, n-я строка которого содержит значения Рn, Az'n и В'n, подвергался обработке в соответствии с формулой изобретения.
Размеры сечений ГЛ априорно заданной ДН антенны с равномерным распределением по излучателям определялись по формулам (23) [Устройства СВЧ и антенны. Проектирование фазированных антенных решеток: Учеб. пособие для вузов / Под ред. Д.И. Вознесенского. М.: Радиотехника, 2012, стр. 35] и составили:


При определении значения ДВКФ S(Azi,Bj) по формуле (6) модуль априорно заданной ДН антенны по мощности с равномерным распределением по излучателям при условии, что излучатели решетки всенаправленные, в направлении k-го сигнала рассчитывался по формуле (24) [Устройства СВЧ и антенны. Проектирование фазированных антенных решеток: Учеб. пособие для вузов / Под ред. Д.И. Вознесенского. М.: Радиотехника, 2012, стр. 41]:

где  - множитель направленности эквивалентной линейной антенной решетки, параллельной оси Х;
- множитель направленности эквивалентной линейной антенной решетки, параллельной оси Х;
 - множитель направленности эквивалентной линейной антенной решетки, параллельной оси Y; пара углов θk, ϕk соответствует паре углов Azk, Вk.
- множитель направленности эквивалентной линейной антенной решетки, параллельной оси Y; пара углов θk, ϕk соответствует паре углов Azk, Вk.
На фиг. 6 проиллюстрирован результат расчета априорно заданной ДН антенной решетки 32×32 элемента в предположении, что максимум ДН направлен на точку  . На фиг. 7 проиллюстрирован результат расчета априорно заданной ДН антенной решетки 32×32 элемента в предположении, что максимум ДН направлен на точку
. На фиг. 7 проиллюстрирован результат расчета априорно заданной ДН антенной решетки 32×32 элемента в предположении, что максимум ДН направлен на точку  с учетом воздействия шумового фона, ошибок позиционирования и погрешностей измерения мощности. На фиг. 8 показан шаблон для расчета значений ДВКФ при обходе сектора ΔAzC × ΔВС, рассчитанный для антенной решетки 32×32. На фиг. 9 приведена ДВКФ, рассчитанная для антенной решетки 32×32 в предположении, что максимум ДН направлен на точку
с учетом воздействия шумового фона, ошибок позиционирования и погрешностей измерения мощности. На фиг. 8 показан шаблон для расчета значений ДВКФ при обходе сектора ΔAzC × ΔВС, рассчитанный для антенной решетки 32×32. На фиг. 9 приведена ДВКФ, рассчитанная для антенной решетки 32×32 в предположении, что максимум ДН направлен на точку  На фиг. 10 приведена рассчитанная ДН антенны 20×20 элементов с учетом воздействия шумового фона и смещения ГЛ по азимуту на -2°, а по углу места на 3°. На фиг. 11 приведен результат расчета ДВКФ после первой итерации, когда реальная ДН была сформирована антенной решеткой 20×20, а шаблон был рассчитан для антенной решетки 32×32.
На фиг. 10 приведена рассчитанная ДН антенны 20×20 элементов с учетом воздействия шумового фона и смещения ГЛ по азимуту на -2°, а по углу места на 3°. На фиг. 11 приведен результат расчета ДВКФ после первой итерации, когда реальная ДН была сформирована антенной решеткой 20×20, а шаблон был рассчитан для антенной решетки 32×32.
По результатам первой итерации было получено:  и
и 
 и
и 
Так как эти результаты не соответствуют требуемым, то осуществлялась вторая итерация. Перед второй и, если потребуется, перед последующими итерациями проводится корректировка шаблона. Для этого необходимо сделать новый расчет значений множителей направленности эквивалентной линейной антенной решетки по формулам (25):


где N*Az и N*B - условные значения количества излучателей; а  соответствует паре углов
соответствует паре углов  Значения N*Az и N*B рассчитывались по формулам (26) и перед второй итерацией расчетов составили:
Значения N*Az и N*B рассчитывались по формулам (26) и перед второй итерацией расчетов составили:
На фиг. 12 проиллюстрирован результат расчета шаблона при 
 N*Az=20,785 и N*B=20,671.
N*Az=20,785 и N*B=20,671.
По результатам второй итерации были получены следующие параметры ГЛ ДН исследуемой антенны: 

 и
и  Относительные ошибки измерения соответствующих параметров в соответствии с формулой (16) составили:
Относительные ошибки измерения соответствующих параметров в соответствии с формулой (16) составили:



Данные ошибки более заданных, и поэтому необходима третья итерация расчетов при 
 и
и  В результате третьей итерации были получены следующие параметры ГЛ ДН исследуемой антенны:
В результате третьей итерации были получены следующие параметры ГЛ ДН исследуемой антенны: 
 и
и  Относительные ошибки измерения соответствующих параметров при этом в соответствии с формулой (16) составили:
Относительные ошибки измерения соответствующих параметров при этом в соответствии с формулой (16) составили:




После третьей итерации значения относительных ошибок оказались меньше заданных, что соответствует прекращению расчетов. В итоге измеренные параметры ГЛ ДН составили: направление ГЛ -  и
и  ширина ГЛ ДН по уровню половинной мощности в азимутальной и угломестной плоскости соответственно
ширина ГЛ ДН по уровню половинной мощности в азимутальной и угломестной плоскости соответственно  и
и  Дополнительно определен размер реально действующего антенного полотна, который после округления значений N*Az и N*B составил 20×20 элементов.
Дополнительно определен размер реально действующего антенного полотна, который после округления значений N*Az и N*B составил 20×20 элементов.
Анализ работоспособности предлагаемого способа автоматического измерения параметров ДН антенны в дальней зоне методом облета с помощью БЛА по сравнению с прототипом позволяет сделать вывод о достижении технического результата изобретения.
Таким образом, отличительные признаки заявляемого способа автоматического измерения параметров ДН антенны в дальней зоне методом облета с помощью БЛА обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный сопоставительный анализ известных способов, технических решений (аналогов) в исследуемой и смежных предметных областях позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного способа, отсутствуют, что указывает на соответствие заявленного устройства условию "новизны".
Результаты поиска известных решений в области радиолокации, радиотехники и антенных измерений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого способа, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Изобретение является "промышленно приемлемым", поскольку предлагаемый способ может быть внедрен в существующих устройствах для измерения ДНА методом облета, а также использоваться в различных областях радиолокации, радиотехники и антенных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2011 |
|
RU2472176C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2410712C1 |

Изобретение относится к технике антенных измерений и может быть использовано для измерения параметров диаграммы направленности (ДН) антенны методом ее облета. Сущность заявленного решения заключается в том, что при реализации осуществляют согласованную фильтрацию используемых сигналов, их временную селекцию, нормировку мощности и пороговую обработку, а также вычисляют двумерную взаимную корреляционную функцию (ДВКФ) поверхности, образованной в трехмерном пространстве значениями мощности превысивших порог сигналов, и шаблоном, образованным в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны. Для повышения точности значения ДВКФ сглаживают методом наименьших квадратов. Также вычисляют двумерную автокорреляционную функцию (ДАКФ) шаблона. По максимуму ДВКФ определяют направление, а по соотношению сечений ДВКФ и ДАКФ - ширину главных сечений ГЛ ДН исследуемой антенны. Расчеты итерационно повторяют, начиная с расчета ДВКФ, до достижения требуемой точности. При этом в качестве априорно заданных параметров ГЛ ДН для новой итерации берут значения, полученные в текущей итерации. В результате обеспечивается повышение точности антенных измерений, сокращение времени измерения технических характеристик антенн и уменьшение стоимости их исследования. Техническим результатом при реализации заявленного решения является повышение точности (качества) измерения параметров главного лепестка (ГЛ) ДН антенны. 12 ил.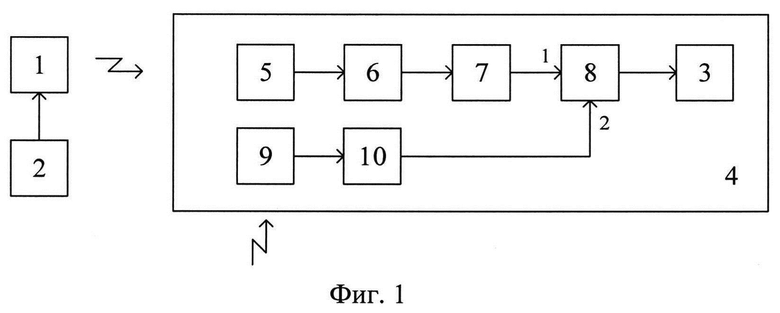
Способ автоматического измерения параметров диаграммы направленности (ДН) антенны в дальней зоне методом облета с помощью беспилотного летательного аппарата (БЛА), заключающийся в том, что в режиме передачи сигналы, излучаемые исследуемой антенной, принимают на борту БЛА и подвергают полосовой фильтрации, а в режиме приема сигналы, излучаемые с борта БЛА, принимают исследуемой антенной, отличающийся тем, что БЛА совершает облет ограниченного углового сектора, центр которого соответствует априорно заданному направлению максимума неподвижной ДН исследуемой антенны, и в режиме передачи исследуемой антенны сигналы, принимаемые на борту БЛА бортовой антенной, при необходимости ослабляют, разделяют на квадратурные составляющие, оцифровывают в цифровом приемнике и записывают оцифрованные сигналы вместе с временем их приема и текущими геодезическими координатами БЛА в бортовой цифровой накопитель, подключенный к бортовому вычислителю, рассчитывающему ДН в режиме передачи сигналов исследуемой антенной, а в режиме приема исследуемой антенны сигналы, излученные с борта БЛА, и принятые данной антенной, усиливают, разделяют на квадратурные составляющие, оцифровывают в цифровом приемнике и записывают оцифрованные сигналы вместе с временем их приема в наземный цифровой накопитель, подключенный к наземному вычислителю, рассчитывающему ДН в режиме приема сигналов исследуемой антенной, причем время излучения сигналов с борта БЛА, а также его геодезические координаты на это время записывают в бортовой цифровой накопитель, а после окончания полета бортовой цифровой накопитель подключают к наземному вычислителю для расчета ДН в режиме приема сигналов исследуемой антенны, осуществляют временную привязку сигналов, принятых исследуемой антенной в режиме приема, и геодезических координат БЛА на момент их излучения, и затем выполняют одинаковые операции как при расчете ДН исследуемой антенны на прием, осуществляемые в наземном вычислителе, так и при расчете ее ДН на передачу, осуществляемые в бортовом вычислителе, а именно: пересчитывают геодезические координаты БЛА, соответствующие времени излучения или приема этих сигналов, в сферическую систему координат, центр которой совпадает с фазовым центром исследуемой антенны; осуществляют согласованную фильтрацию записанных в соответствующем цифровом накопителе сигналов, осуществляют их детектирование и временную селекцию; нормируют их мощность в зависимости от дальности, на которой находился БЛА в момент их излучения или приема в соответствии с выражением  где Dзад. - удаление БЛА от исследуемой антенны, заданное для проведения измерений, Dизм.,n - реальное удаление БЛА от исследуемой антенны при приеме n-го сигнала, Рn - мощность n-го сигнала, n=1…N, N - количество сигналов, принятых за все время облета БЛА исследуемой антенны; сравнивают с пороговым уровнем, отбирая при этом для дальнейшей обработки те сигналы, которые были получены при нахождении БЛА в главном лепестке (ГЛ) ДН исследуемой антенны, мощность которых удовлетворяет условию Рнор.,n>П, где П=Рнор.,max / T - уровень порога, Pнор.,max - максимальная нормированная мощность сигналов, принятых за все время облета БЛА исследуемой антенны, Т - пороговый множитель, значение которого обеспечивает дальнейшую обработку только тех сигналов, которые были приняты, когда БЛА находился в ГЛ ДН исследуемой антенны; вычисляют двумерную взаимную корреляционную функцию (ДВКФ) поверхности, образованной в трехмерном пространстве значениями мощности превысивших пороговый уровень сигналов и соответствующими им значениями азимута и угла места, и шаблона, образованного в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны в пределах ее ГЛ по уровню половинной мощности и соответствующими им значениями азимута и угла места по соотношению
где Dзад. - удаление БЛА от исследуемой антенны, заданное для проведения измерений, Dизм.,n - реальное удаление БЛА от исследуемой антенны при приеме n-го сигнала, Рn - мощность n-го сигнала, n=1…N, N - количество сигналов, принятых за все время облета БЛА исследуемой антенны; сравнивают с пороговым уровнем, отбирая при этом для дальнейшей обработки те сигналы, которые были получены при нахождении БЛА в главном лепестке (ГЛ) ДН исследуемой антенны, мощность которых удовлетворяет условию Рнор.,n>П, где П=Рнор.,max / T - уровень порога, Pнор.,max - максимальная нормированная мощность сигналов, принятых за все время облета БЛА исследуемой антенны, Т - пороговый множитель, значение которого обеспечивает дальнейшую обработку только тех сигналов, которые были приняты, когда БЛА находился в ГЛ ДН исследуемой антенны; вычисляют двумерную взаимную корреляционную функцию (ДВКФ) поверхности, образованной в трехмерном пространстве значениями мощности превысивших пороговый уровень сигналов и соответствующими им значениями азимута и угла места, и шаблона, образованного в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны в пределах ее ГЛ по уровню половинной мощности и соответствующими им значениями азимута и угла места по соотношению  в котором
в котором  азимут и угол места очередного углового направления, Azнач. и Bнач. - начальные границы ограниченного углового сектора по азимуту и углу места соответственно,
азимут и угол места очередного углового направления, Azнач. и Bнач. - начальные границы ограниченного углового сектора по азимуту и углу места соответственно,  и
и  - размеры соответственно азимутального и угломестного сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности,
- размеры соответственно азимутального и угломестного сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности,  и
и  дискреты расчета ДВКФ по азимуту и углу места соответственно, ΔAzC и ΔВС - азимутальный и угломестный размеры сектора облета соответственно, i=1…I, I - количество направлений по азимуту для расчета значений ДВКФ, j=1…J, J - количество направлений по углу места для расчета значений ДВКФ, Рнор.,k(Azk,Bk) - мощность нормированного и превысившего уровень порога П сигнала, принятого в момент нахождения БЛА на азимуте Azk и угле места Bk, значения которых соответственно удовлетворяют условиям
дискреты расчета ДВКФ по азимуту и углу места соответственно, ΔAzC и ΔВС - азимутальный и угломестный размеры сектора облета соответственно, i=1…I, I - количество направлений по азимуту для расчета значений ДВКФ, j=1…J, J - количество направлений по углу места для расчета значений ДВКФ, Рнор.,k(Azk,Bk) - мощность нормированного и превысившего уровень порога П сигнала, принятого в момент нахождения БЛА на азимуте Azk и угле места Bk, значения которых соответственно удовлетворяют условиям
a F(Azk - Azi,Bk-Вi) - модуль априорно заданной ДН исследуемой антенны по мощности в направлении азимута Azk и угла места Вk; k=l...Ki j, Ki,j - общее количество сигналов, принятых БЛА, находящимся внутри сектора  центр которого направлен на азимут Azi и угол места Вj; а затем находят значения азимута Azd и угла места Bl при которых ДВКФ максимальна, формируют угломестную и азимутальную выборки S(Azd,B1), …, S(Azd,Bl-1), S(Azd,Bl), S(Azd,Bl+1), …, S(Azd,BJ) и S(Az1,Bl), …, S(Azd-1,Bl), S(Azd,Bl), S(Azd+1,Bl), …, S(AzI,Bl), сглаживают каждую выборку методом наименьших квадратов, получая два полинома степени q - азимутальный G(Az)=bqAzq+bq-1Azq-1+…+b1Az+b0 и угломестный G(B)=aqBq+aq-1Bq-1+…+a1B+a0 соответственно, где a0, a1, …, aq-1, aq и b0, b1, …, bq-1, bq - коэффициенты соответствующих полиномов; определяют азимут направления максимума ГЛ ДН исследуемой антенны
центр которого направлен на азимут Azi и угол места Вj; а затем находят значения азимута Azd и угла места Bl при которых ДВКФ максимальна, формируют угломестную и азимутальную выборки S(Azd,B1), …, S(Azd,Bl-1), S(Azd,Bl), S(Azd,Bl+1), …, S(Azd,BJ) и S(Az1,Bl), …, S(Azd-1,Bl), S(Azd,Bl), S(Azd+1,Bl), …, S(AzI,Bl), сглаживают каждую выборку методом наименьших квадратов, получая два полинома степени q - азимутальный G(Az)=bqAzq+bq-1Azq-1+…+b1Az+b0 и угломестный G(B)=aqBq+aq-1Bq-1+…+a1B+a0 соответственно, где a0, a1, …, aq-1, aq и b0, b1, …, bq-1, bq - коэффициенты соответствующих полиномов; определяют азимут направления максимума ГЛ ДН исследуемой антенны  из условия
из условия  и угол места направления максимума ГЛ ДН исследуемой антенны
и угол места направления максимума ГЛ ДН исследуемой антенны  из условия
из условия  рассчитывают значения азимутального сечения двумерной автокорреляционной функции (ДАКФ) поверхности, являющейся шаблоном и образованной в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны и соответствующими им значениями азимута и угла места, по соотношению
рассчитывают значения азимутального сечения двумерной автокорреляционной функции (ДАКФ) поверхности, являющейся шаблоном и образованной в трехмерном пространстве значениями модуля априорно заданной ДН исследуемой антенны и соответствующими им значениями азимута и угла места, по соотношению  в котором F(.) - модуль априорно заданной ДН исследуемой антенны по мощности,
в котором F(.) - модуль априорно заданной ДН исследуемой антенны по мощности,  и
и  - измеренные значения азимута и угла места направления максимума ГЛ ДН исследуемой антенны,
- измеренные значения азимута и угла места направления максимума ГЛ ДН исследуемой антенны,
 - пределы интегрирования,
- пределы интегрирования,
 - количество направлений по азимуту для расчета значений азимутального сечения ДАКФ,
- количество направлений по азимуту для расчета значений азимутального сечения ДАКФ,  - азимут начала азимутального сечения ДАКФ,
- азимут начала азимутального сечения ДАКФ,  - азимут конца азимутального сечения ДАКФ; а также рассчитывают значения угломестного сечения ДАКФ по формуле:
- азимут конца азимутального сечения ДАКФ; а также рассчитывают значения угломестного сечения ДАКФ по формуле:

где  - пределы интегрирования,
- пределы интегрирования,  - количество направлений по углу места для расчета значений угломестного сечения ДАКФ,
- количество направлений по углу места для расчета значений угломестного сечения ДАКФ,  - угол места начала угломестного сечения ДАКФ,
- угол места начала угломестного сечения ДАКФ,  - угол места конца угломестного сечения ДАКФ; сглаживают выборки
- угол места конца угломестного сечения ДАКФ; сглаживают выборки  и
и  методом наименьших квадратов, получая два сглаживающих полинома степени q - азимутальный GF(Az)=bqAzq+bq-1Azq-1+…+b1Az+b0 и угломестный GF{B)=aqBq+aq-1Bq-1+…+axB+a0 соответственно; определяют коэффициенты согласованности размеров соответствующих сечений ДВКФ и ДАКФ по формулам:
методом наименьших квадратов, получая два сглаживающих полинома степени q - азимутальный GF(Az)=bqAzq+bq-1Azq-1+…+b1Az+b0 и угломестный GF{B)=aqBq+aq-1Bq-1+…+axB+a0 соответственно; определяют коэффициенты согласованности размеров соответствующих сечений ДВКФ и ДАКФ по формулам:  и
и где B(1) и B(2) - азимутальные и угломестные границы соответствующих сечений ДВКФ, определяют соответственно из условий:
где B(1) и B(2) - азимутальные и угломестные границы соответствующих сечений ДВКФ, определяют соответственно из условий:
 и
и
 и
и  - азимутальные и угломестные границы соответствующих сечений ДАКФ определяют соответственно из условий:
- азимутальные и угломестные границы соответствующих сечений ДАКФ определяют соответственно из условий:
 и
и 
а затем определяют размеры азимутального и угломестного сечений ГЛ ДН исследуемой антенны по уровню половинной мощности как произведения ширины соответствующих сечений ГЛ априорно заданной ДН исследуемой антенны по уровню половинной мощности на соответствующие коэффициенты согласованности размеров соответствующих сечений ДВКФ и ДАКФ -  и
и  и если рассчитанные значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности не соответствуют априорно заданным значениям на величину относительной ошибки более установленной:
и если рассчитанные значения направления ГЛ ДН исследуемой антенны и ширины его соответствующих сечений по уровню половинной мощности не соответствуют априорно заданным значениям на величину относительной ошибки более установленной:


где  и
и  - азимут и угол места априорно заданного направления максимума ДН исследуемой антенны,
- азимут и угол места априорно заданного направления максимума ДН исследуемой антенны,  - заданные относительные ошибки измерения соответствующих параметров, i - номер итерации вычислений параметров ГЛ ДН исследуемой антенны; то осуществляют новую итерацию расчетов, начиная с расчета ДВКФ, предварительно взяв в качестве априорно заданных значения направления ГЛ ДН исследуемой антенны и размеры его соответствующих сечений по уровню половинной мощности, полученные в результате выполнения последней итерации расчетов, причем расчеты прекращают, когда все относительные ошибки измерения соответствующих параметров ГЛ ДН исследуемой антенны становятся менее заданной величины или знаки разницы между соответствующими заданными и измеренными значениями этих параметров в текущей итерации вычислений меняются на противоположные по сравнению с предыдущей итерацией, то есть когда выполняются условия:
- заданные относительные ошибки измерения соответствующих параметров, i - номер итерации вычислений параметров ГЛ ДН исследуемой антенны; то осуществляют новую итерацию расчетов, начиная с расчета ДВКФ, предварительно взяв в качестве априорно заданных значения направления ГЛ ДН исследуемой антенны и размеры его соответствующих сечений по уровню половинной мощности, полученные в результате выполнения последней итерации расчетов, причем расчеты прекращают, когда все относительные ошибки измерения соответствующих параметров ГЛ ДН исследуемой антенны становятся менее заданной величины или знаки разницы между соответствующими заданными и измеренными значениями этих параметров в текущей итерации вычислений меняются на противоположные по сравнению с предыдущей итерацией, то есть когда выполняются условия:



| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Способ измерения диаграммы направленности антенны источника радиоизлучения, местоположение которого неизвестно | 2017 |
|
RU2653105C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| СИСТЕМА НАВИГАЦИИ БЛИЖНЕГО ПОЛЯ | 2012 |
|
RU2602833C2 |
| Способ измерения диаграммы направленности приемной антенны | 1990 |
|
SU1778714A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2015 |
|
RU2649084C2 |
| JP 0007128382 A, 19.05.1995 | |||
| JP 4628255 B2, 09.02.2011. | |||

