Изобретение относится к машинам для производства землеройных и(или) грузоподъемных работ (экскаваторам, подъемным кранам и т.п.), работающим от источника электрической энергии и совершающим в процессе работы поворот относительно своей вертикальной оси.
Известна машина для производства грузоподъемных работ, содержащая опорно-поворотное устройство, платформу, закрепленную на вращающейся части опорно-поворотного устройства, рабочее оборудование с электроприводом, установленное на платформе, и токоприемник [1].
В известной машине токоприемник представляет собой шлейф из гибких проводов, связывающий клеммы на неподвижной части опорно-поворотного устройства и на платформе.
Недостатками данной конструкции являются:
- ограниченная возможность поворота (максимум 720o) и в связи с этим необходимость в установке счетчика оборотов или ограничителя оборотов, неисправность которых может привести к скручиванию и обрыву проводов шлейфа,
- затрудненный доступ к клеммам, расположенным на невращающейся части опорно-поворотного устройства.
Известна машина для производства грузоподъемных работ, содержащая опорно-поворотное устройство, платформу, закрепленную на вращающейся части опорно-поворотного устройства, рабочее оборудование с электроприводом, установленное на платформе, и кольцевой токоприемник, вращающаяся часть которого связана с платформой, а неподвижная - с невращающейся частью опорно-поворотного устройства [2].
В известной машине токоприемник установлен на платформе.
Недостатком данной конструкции является то, что при размещении на платформе дополнительного оборудования перекрывается доступ к токоприемнику со стороны дополнительного оборудования или увеличиваются габаритные размеры платформы, а при размещении токоприемника под платформой затрудняются доступ к нему, его монтаж и обслуживание или возникает необходимость увеличения высотных габаритов основания.
Задачей изобретения является уменьшение трудоемкости при сборке и обслуживании машины, когда производятся работы с токоприемником, а также возможность размещения дополнительного оборудования на платформе без ограничения по расположению токоприемника.
Задача решается тем, что машина для землеройных и(или) грузоподъемных работ, содержащая опорно-поворотное устройство, платформу, закрепленную на вращающейся части опорно-поворотного устройства, рабочее оборудование и электропривод, установленные на платформе, и снабженный кожухом кольцевой токоприемник, вращающаяся часть которого связана с платформой, а неподвижная - с невращающейся частью опорно-поворотного устройства, дополнительно снабжена механизмом сцепления токоприемника с платформой, а также кронштейном для токоприемника, установленным на невращающейся части опорно-поворотного устройства с возможностью поворота относительно оси, параллельной оси поворота платформы.
При этом кожух и вращающаяся часть токоприемника жестко соединены между собой, а механизм сцепления содержит Т-образное водило, горизонтальная планка и вертикальный стержень которого соединены карданной муфтой, и закрепленные на кожухе токоприемника V-образные призмы, планка водила размещена в призмах токоприемника, а стержень водила установлен на платформе с возможностью возвратно-поступательного перемещения, при этом его ось совмещена с осью поворота платформы.
Для облегчения вывода токоприемника из рабочей зоны водило снабжено фиксатором нерабочего положения. Для увеличения надежности работы токоприемника кронштейн для токоприемника снабжен фиксатором рабочего положения.
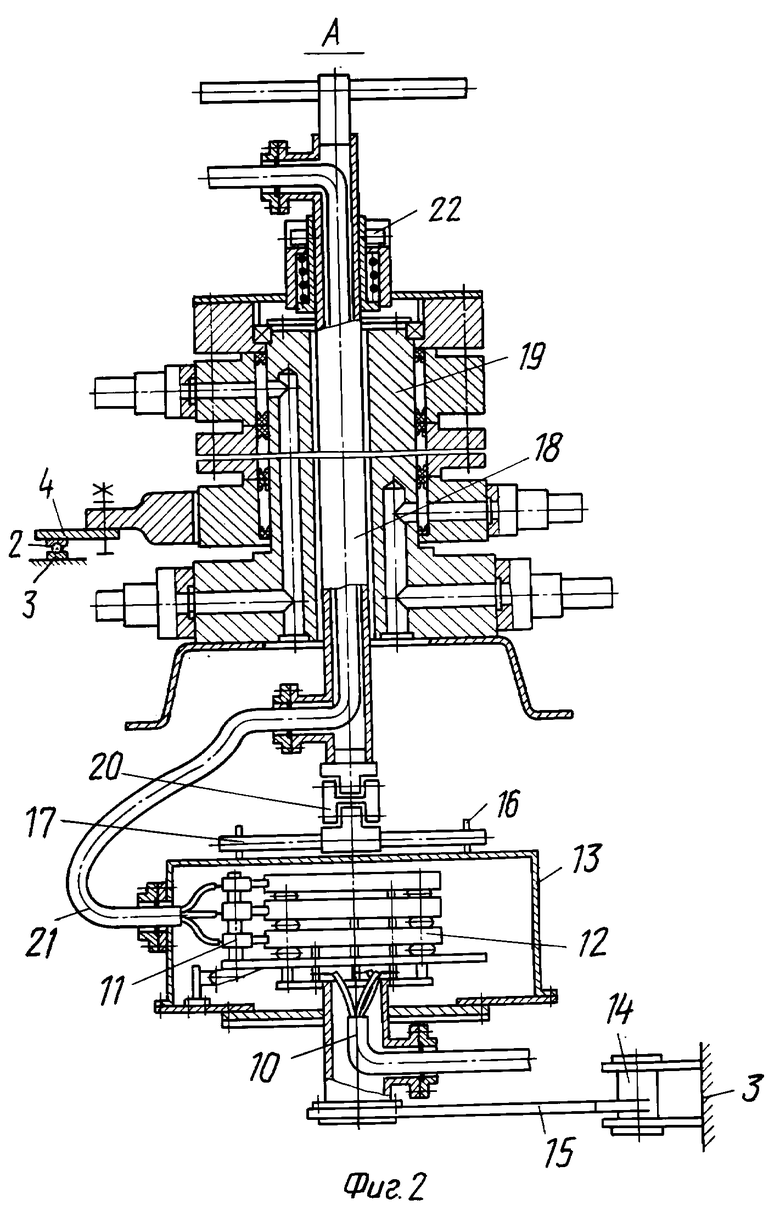
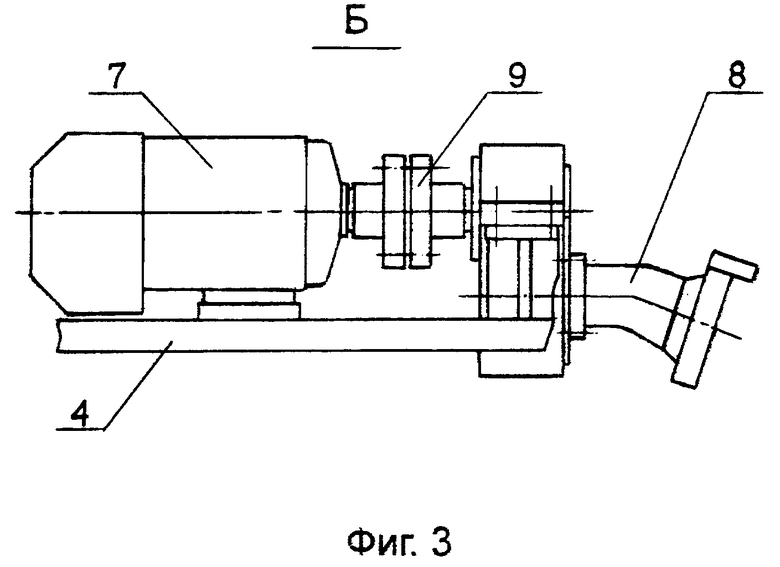
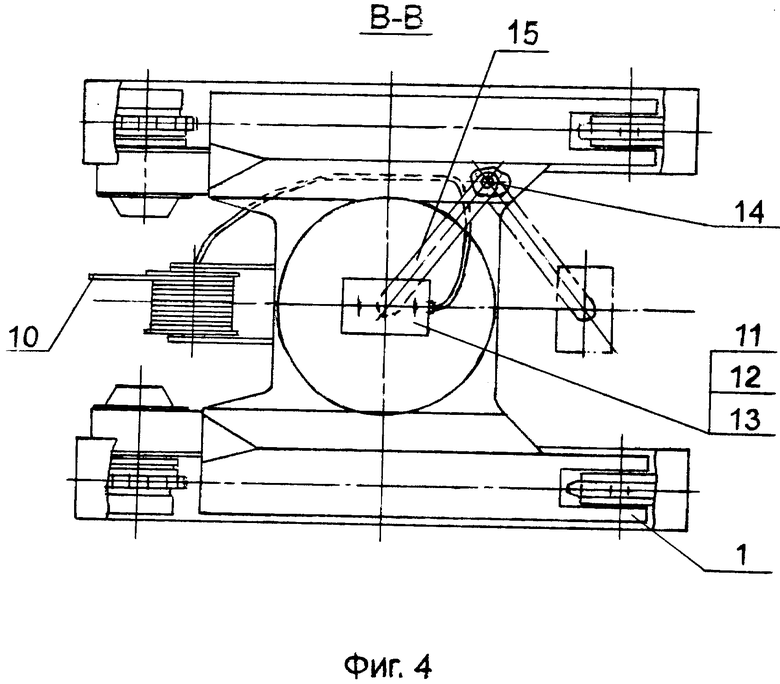
На чертежах приведен пример выполнения предложенного устройства, где на фиг. 1 - общий вид; на фиг. 2 - размещение токоприемника и механизма сцепления (узел А на фиг. 1 в разрезе); на фиг. 3 - привод машины (вид Б на фиг. 1); на фиг. 4 - расположение кронштейна токоприемника (разрез В-В на фиг. 1).
Предложенная машина выполнена в виде экскаватора, содержащего шасси 1, опорно-поворотное устройство, состоящее из вращающейся 2 и невращающейся 3 частей, и платформу 4, закрепленную на вращающейся части 2 опорно-поворотного устройства. На платформе 4 установлены кабины 5, рабочее оборудование 6, электропривод 7, приводы 8 рабочего оборудования и механизмов машины, соединенные с электроприводом 7 посредством муфты 9.
Машина подключена к источнику питания посредством кабеля 10 через кольцевой токоприемник, содержащий вращающуюся часть 11, невращающуюся часть 12 и кожух 13. На невращающейся части 3 опорно-поворотного устройства с возможностью поворота установлен на оси 14 кронштейн 15, на котором закреплена невращающаяся часть 12 токоприемника. Вращающаяся часть 11 жестко связана с кожухом 13. Механизм сцепления содержит закрепленные на кожухе 13 V-образные призмы 16 и расположенное по оси поворота платформы Т-образное водило, горизонтальная планка 17 которого размещается в призмах 16, а вертикальный стержень 18 закреплен внутри полого коллектора 19 платформы 4 и соединен с планкой 17 карданной муфтой 20. Через стержень 18, выполненный полым, проходит кабель 21 для подвода электроэнергии от вращающейся части 11 токоприемника к электроприводу 7.
На механизме сцепления имеется фиксатор 22 нерабочего положения, а на кронштейне 15 - фиксатор 23 рабочего положения.
При работе описываемой машины, при повороте платформы 4, водило вращается совместно с платформой, и горизонтальная планка 17 водила, находясь в призмах 16 кожуха 13, поворачивает кожух и вращающуюся часть 11 токоприемника, жестко связанную с кожухом. Благодаря этому концы кабеля 21, присоединенные один к электроприводу 7 машины, а другой - к вращающейся части 11 токоприемника, остаются практически неподвижными относительно друг друга. Карданная муфта 20 механизма сцепления компенсирует несоосность осей вращения токоприемника и платформы.
При обслуживании машины, когда возникает необходимость выведения токоприемника из рабочей зоны, водило механизма сцепления вручную поднимается, при этом горизонтальная планка 17 водила выходит из призм 16 кожуха. Фиксатором 22 вертикальный стержень 18 закрепляется в верхнем положении. Кронштейн 15 для токоприемника снимается со стопора фиксатором 23 и поворачивается на оси 14 до выведения токоприемника в зону обслуживания.
Таким образом, предложенное выполнение машины обеспечивает:
- возможность подвода электроэнергии к приводу машины при неограниченном вращении в любую сторону платформы с рабочим оборудованием:
- удобный доступ к токоприемному устройству, что уменьшает трудоемкость при сборке и обслуживании машины,
- место для размещения на платформе дополнительного оборудования без увеличения габаритов платформы.
Источники информации:
1. Дубовский К.Н. Справочник машиниста башенных кранов. - М.: Машиностроение, 1979, с. 144, рис. 77.
2. Подъемно-транспортные машины. Атлас конструкций /Под редакцией М.П. Александрова и Д.Н. Решетова, - М.: Машиностроение, 1973, с. 141 (лист 131), рис. 1.1
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Стенд для исследования механизмов | 1987 |
|
SU1636855A1 |
| УСТРОЙСТВО ДЛЯ ПРОМЫВКИ СТВОЛА МУСОРОПРОВОДОВ | 2000 |
|
RU2194829C2 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| АГРОМОСТ | 1997 |
|
RU2114524C1 |
| ВОЗДУХОДУВНАЯ УСТАНОВКА ДЛЯ СОЗДАНИЯ ЛОКАЛЬНЫХ ПОГОДНЫХ УСЛОВИЙ ИЛИ ДЛЯ ИХ ИМИТАЦИИ | 2005 |
|
RU2294785C2 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАТЕЛЬСКИХ И ДОВОДОЧНЫХ РАБОТ ПО ОЦЕНКЕ ВЛИЯНИЯ ВНЕШНЕГО ВОЗДЕЙСТВИЯ ДОЖДЯ НА ВИБРОАКУСТИКУ АВТОМОБИЛЯ | 2014 |
|
RU2557630C1 |
Изобретение относится к экскаваторам, подъемным кранам, перегрузчикам и другим подобным устройствам с электрическим приводом, совершающим в процессе работы поворот вокруг своей вертикальной оси. Машина содержит платформу с электроприводом и рабочим оборудованием, установленную на вращающейся части опорно-поворотного устройства, и снабженный кожухом кольцевой токоприемник, вращающаяся часть которого связана с платформой, а неподвижная - с невращающейся частью. Машина снабжена кронштейном для кольцевого токоприемника установленным на невращающейся части опорно-поворотного устройства с возможностью поворота вокруг оси, и механизмом сцепления токоприемника с платформой. Механизм сцепления содержит V-образные призмы, закрепленные на кожухе токоприемника, и Т-образное водило, горизонтальная планка которого установлена в призмах, а соединенный с ней карданной муфтой вертикальный стержень установлен по оси поворота платформы с возможностью возвратно-поступательного перемещения. Этим обеспечивается взаимная неподвижность концов кабеля, подводящего электроэнергию от токоприемника к электроприводу, при вращении платформы в процессе работы, а также обеспечиваются выведение токоприемника из зацепления с платформой и отведение его в положение, удобное для обслуживания. Уменьшается трудоемкость при сборке и обслуживании машины. 2 з.п. ф-лы, 4 ил.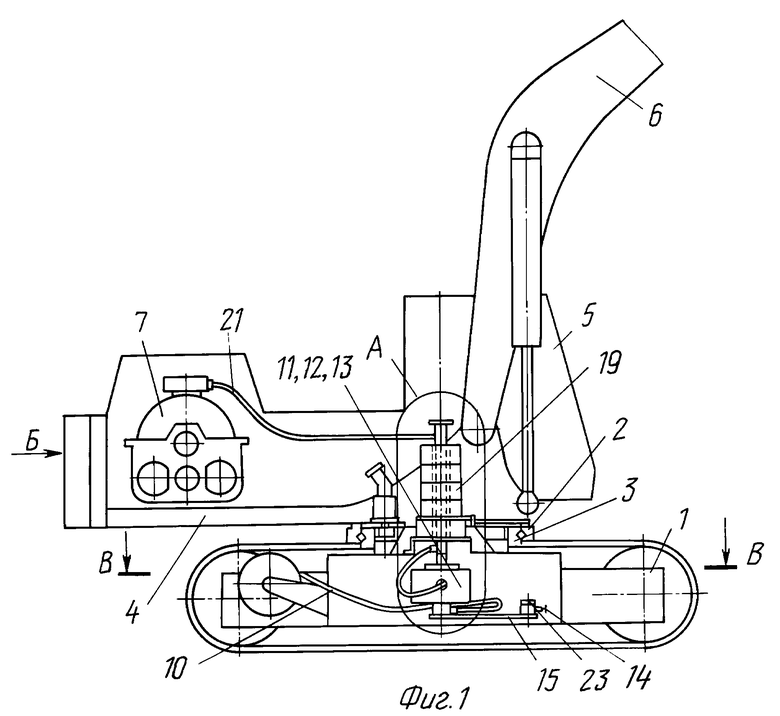
| АЛЕКСАНДРОВ М.П | |||
| и др | |||
| Подъемно-транспортные машины | |||
| Атлас конструкций | |||
| - М.: Машиностроение, 1973, с.141 (лист.131), рис.1 | |||
| УСТРОЙСТВО для ПЕРЕДАЧИ ЭЛЕКТРОЭНЕРГИИ С НЕПОДВИЖНОЙ ЧАСТИ НА ВРАЩАЮЩУЮСЯ | 0 |
|
SU201979A1 |
| СТРОИТЕЛЬНЫЙ ПОВОРОТНЫЙ КРАН | 0 |
|
SU360309A1 |
| FR 2060430 А, 18.06.1971 | |||
| ГАРБУЗОВ З.Е | |||
| и др | |||
| Экскаваторы непрерывного действия | |||
| - М.: Высшая школа, 1975, с.31 и 32, рис.14. | |||
