Настоящее изобретение относится к водному транспорту и касается создания судовых якорей для волочильного внедрения в донный грунт.
Известен судовой якорь для волочильного внедрения в донный грунт, содержащий лапу и хвостовик, прикрепленный к лапе и содержащий первую и вторую раздельно расположенные точки для крепления соответственно первой и второй якорных цепей к якорю, при этом первая якорная цепь имеет возможность осуществления тягового воздействия на якорь и возможность волочильного внедрения якоря (WO 89/09722, МПК B 63 B 21/32, опублик. 19.10.89).
Однако такой якорь обладает низкими эксплуатационными качествами.
Технический результат реализации изобретения заключается в повышении его эксплуатационных качеств.
Этот технический результат достигается тем, что судовой якорь для волочильного внедрения в донный грунт содержит лапу и хвостовик, прикрепленный к лапе и содержащий первую и вторую раздельно расположенные точки для крепления соответственно первой и второй якорных цепей к якорю, при этом первая якорная цепь имеет возможность осуществления тягового воздействия на якорь и возможность волочильного внедрения якоря, согласно изобретению якорь выполнен с возможностью его укладки с ориентированием для обеспечения прямых линий в первом и втором направлениях, причем первая линия в первом направлении, содержащая центроид лапы и первую точку крепления, образует первый угол α с линией пересечения плоской поверхности лапы с продольной плоскостью симметрии лапы, причем первый угол α раскрыт в сторону направления волочильного внедрения якоря, а прямая линия во втором направлении, содержащая центроид лапы и вторую точку крепления, образует второй угол β с линией пересечения плоской поверхности лапы с продольной плоскостью симметрии лапы, причем второй угол β раскрыт в сторону направления волочильного внедрения якоря и его величина больше, чем первый угол α таким образом, что проектируемая во втором направлении площадь лапы больше, чем площадь лапы, проектируемая в первом направлении, для обеспечения ограничивающей нагрузки якорем, внедренным в донный грунт, когда имеется тяговое усилие, прилагаемое по второй якорной цепи и ее точке крепления.
У такого судового якоря целесообразно, по крайне мере, часть хвостовика, имеющую первую точку крепления первой якорной цепи, выполнять с возможностью разъединения с якорем, при этом предусмотрены дистанционно приводимые разъемные средства для освобождения этой части хвостовика.
Второй угол β у такого якоря может находиться в пределах от 68 до 112o особенно при использовании якоря в песчаном грунте.
У такого якоря второй угол β может находиться в пределах от 84 до 96o особенно при использовании якоря в топком грунте.
Хвостовик такого якоря может быть выполнен плоским с толщиной менее 5% от ширины лапы.
Известен также судовой якорь для волочильного внедрения в донный грунт, содержащий лапу и хвостовик, прикрепленный к лапе вблизи или позади центроида лапы и имеющий качающуюся часть с точкой крепления якорной цепи, причем указанная точка имеет возможность перемещаться между прямыми линиями первого и второго направлений и находиться на указанных линиях при качании части хвостовика вокруг оси качания, расположенной поперечно продольной плоскости симметрии лапы, при этом якорная цепь имеет возможность тянущего воздействия на якорь, когда точка крепления цепи находится на линии первого направления, служащей для волочильного внедрения якоря (US 3685479A, МПК B 63 B 21/24, опублик. 22.08.72).
Однако такой судовой якорь также обладает пониженными эксплуатационными качествами.
Технический результат реализации другого изобретения их группы заключается в повышении эксплуатационных качеств судового якоря.
Этот технический результат достигается тем, что у судового якоря для волочильного внедрения в донный грунт, содержащего лапу и хвостовик, прикрепленный к лапе вблизи или позади центроида лапы и имеющий качающуюся часть с точкой крепления якорной цепи, причем указанная точка имеет возможность перемещаться между прямыми линиями первого и второго направлений и находится на указанных линиях при качании части хвостовика вокруг оси качания, расположенной поперечно продольной плоскости симметрии лапы, при этом якорная цепь имеет возможность тянущего воздействия на якорь, когда точка крепления цепи находится на линии первого направления, служащей для волочильного внедрения якоря, согласно изобретению прямая линия первого направления, включающая в себя центроид лапы и вышеупомянутую точку крепления цепи, образует первый угол α с линией пересечения плоской поверхности лапы с продольной плоскостью симметрии лапы, причем первый угол α раскрыт в сторону направления волочильного внедрения якоря, а прямая линия второго направления, содержащая центроид лапы и указанную точку крепления, образует второй угол β с линией пересечения плоской поверхности лапы с продольной плоскостью симметрии лапы, при этом второй угол β раскрыт в сторону направления волочильного внедрения якоря и его величина больше, чем первый угол α таким образом, что проектируемая во втором направлении площадь лапы больше, чем площадь лапы, проектируемая в первом направлении для обеспечения ограничивающей нагрузки якорем, внедренным в грунт, когда имеется тяговое действие посредством якорной цепи, прикрепленной к точке крепления при нахождении на линии второго направления.
Такой судовой якорь может содержать дистанционно приводимые средства, обеспечивающие избирательное перемещение якорной цепи от прямой линии первого направления к прямой линии второго направления.
Судовой якорь может включать в себя первые ограничивающие средства для ограничения хвостовика таким образом, чтобы точка крепления якорной цепи лежала на прямой линии первого направления, и первые ограничивающие освобождающие средства для освобождения первых ограничивающих средств, качания хвостовика и перемещения точки крепления якорной цепи на прямую линию второго направления.
Судовой якорь может содержать вторые ограничивающие средства для предотвращения качания хвостовика при расположении точки крепления якорной цепи на прямой линии второго направления.
У такого судового якоря вторые ограничивающие средства могут включать в себя стопор, прикрепленный, по меньшей мере, к хвостовику или лапе.
Стопор у такого якоря может выполняться с возможностью запирания хвостовика относительно лапы.
У такого якоря первые ограничивающие освобождающие средства могут содержать срезаемый палец, связывающий хвостовик с лапой вблизи оси его качания.
Ось качания у такого якоря может располагаться вблизи центроида лапы, а срезаемый палец - вблизи оси качания.
Первые ограничивающие освобождающие средства такого судового якоря могут выполняться с возможностью дистанционного приведения их в действие.
Они могут выполняться с возможностью дистанционного приведения их в действие посредством управляющего шкентельного троса, прикрепленного к ним и имеющего возможность приложения к этому управляющему шкентельному тросу вертикальной тяги.
У такого якоря первые ограничивающие средства могут содержать передвигаемый клиновой стопор, расположенный между хвостовиком и лапой и прикрепленный к управляющему шкентельному тросу.
Первые ограничивающие освобождающие средства у такого судового якоря могут быть выполнены с удлиненным рычажным элементом, к одному концу которого может быть прикреплен управляющий шкентельный трос, а другой конец этого элемента может быть снабжен выступающим носком, причем этот элемент другим концом прикреплен с возможностью качания к клиновому стопору.
У такого судового якоря упомянутый рычажный элемент у его конца, прикрепленного к упомянутому шкентельному тросу, может быть прикреплен к хвостовику с помощью средств освобождения от этого прикрепления, приводимых в действие управляющим шкентельным тросом.
Упомянутые средства освобождения у такого якоря могут включать в себя срезаемый палец.
Второй угол β у такого якоря может находиться в пределах от 68 до 112o особенно при использовании якоря в песчаном грунте.
Второй угол β такого судового якоря может находиться в пределах от 84 до 96o особенно при использовании якоря в топком грунте.
Хвостовик такого якоря может выполняться плоским с толщиной менее 5% от ширины лапы.
Изобретение поясняется конкретным вариантом его выполнения со ссылками на прилагаемые чертежи, на которых:
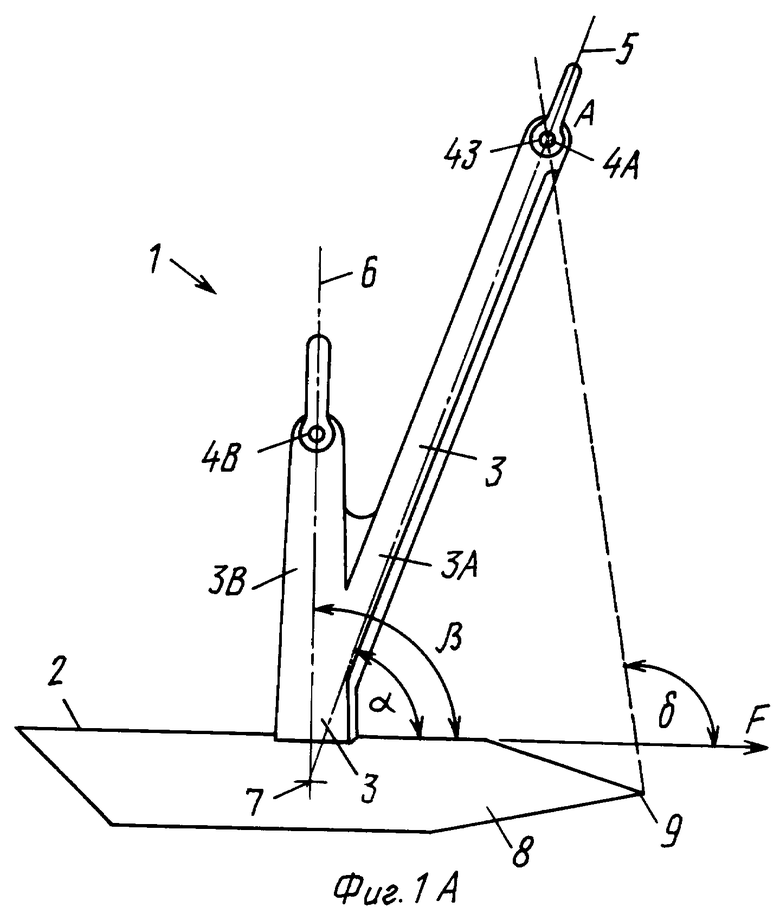
фиг. 1 - боковой вид судового якоря согласно первому примеру реализации настоящего изобретения,
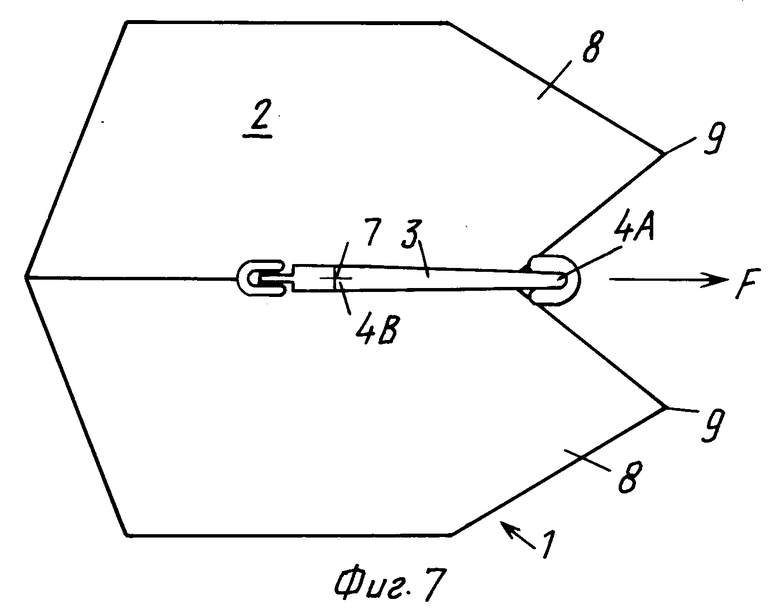
фиг. 2 - вид в плане якоря, изображенного на фиг. 1,
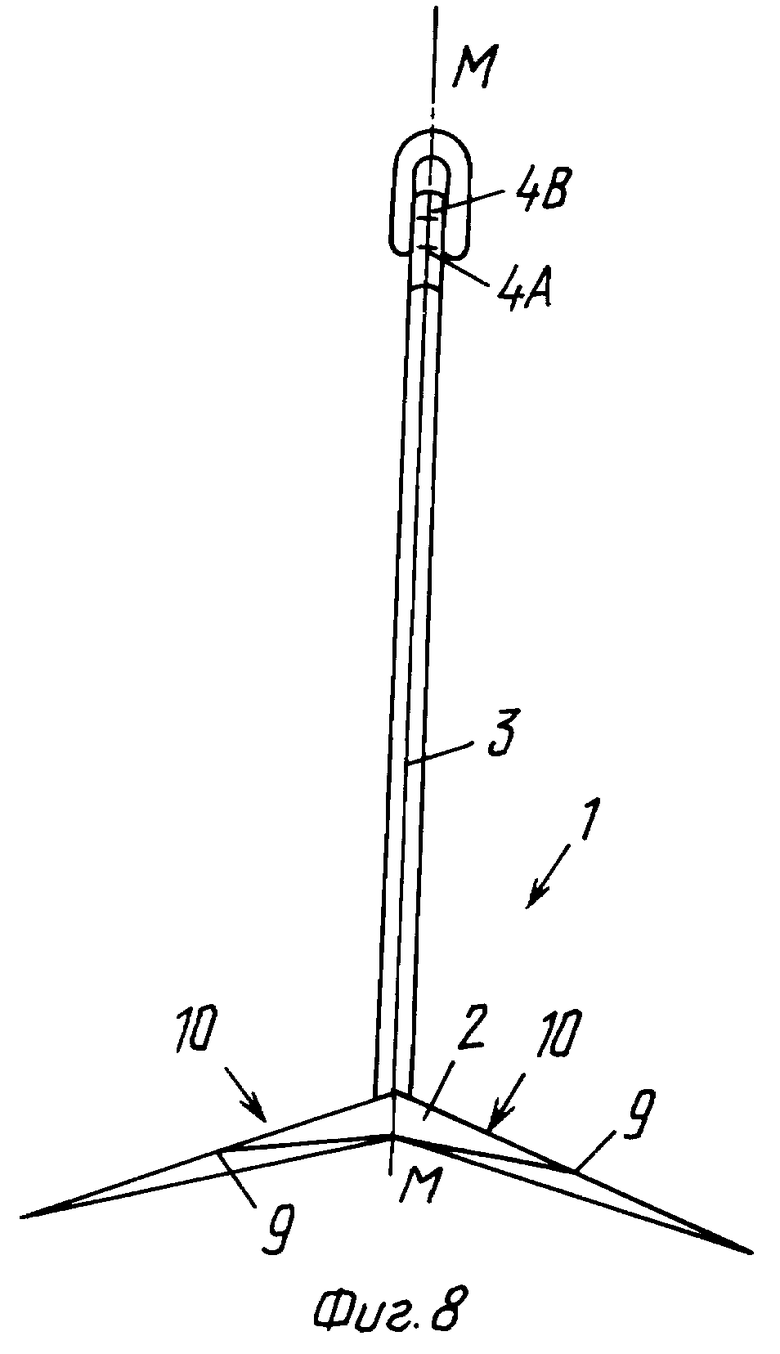
фиг. 3 - вид спереди на якорь, изображенный на фиг. 1,
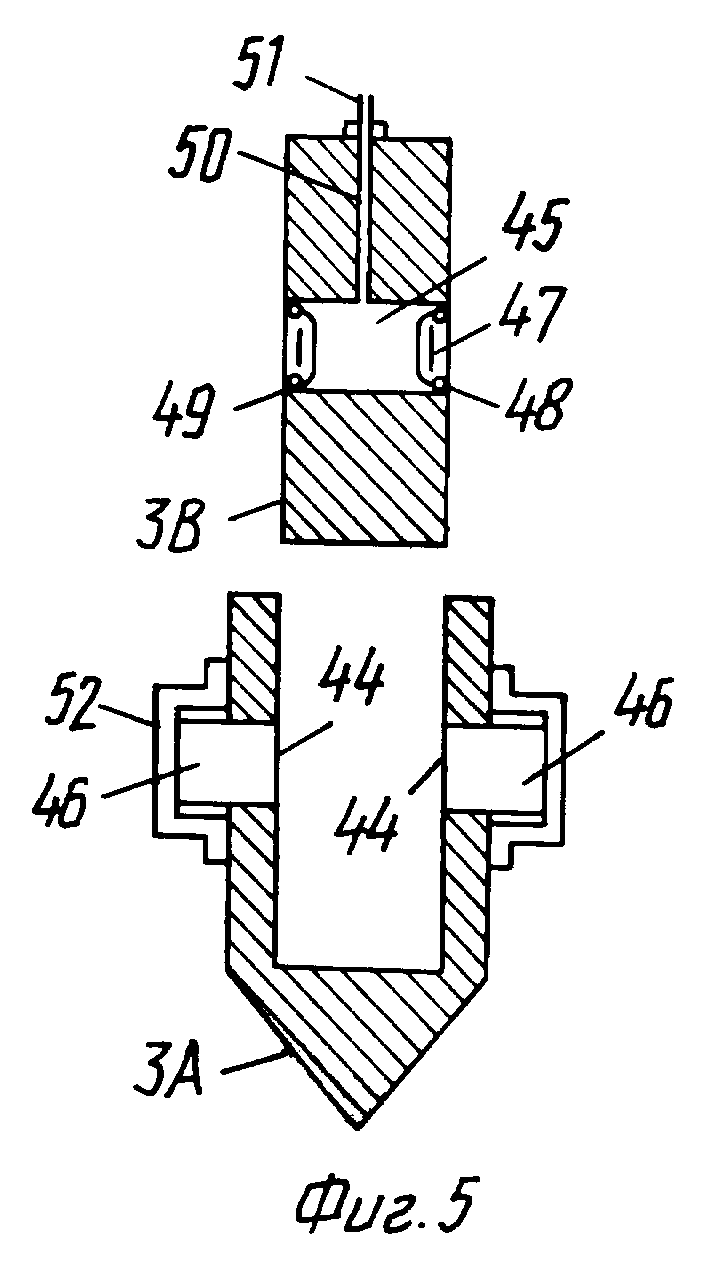
фиг. 4 - вид сечения по P-P по разъемной связи якоря по фиг. 1,
фиг. 5 - связь по фиг. 4 в разъединенном виде,
фиг. 1A-3A - подобные виды по фиг. 1 - 3 для модифицированного якоря,
фиг. 6 - 8 - виды, подобные по фиг. 1 - 3 для второго примера реализации настоящего изобретения,
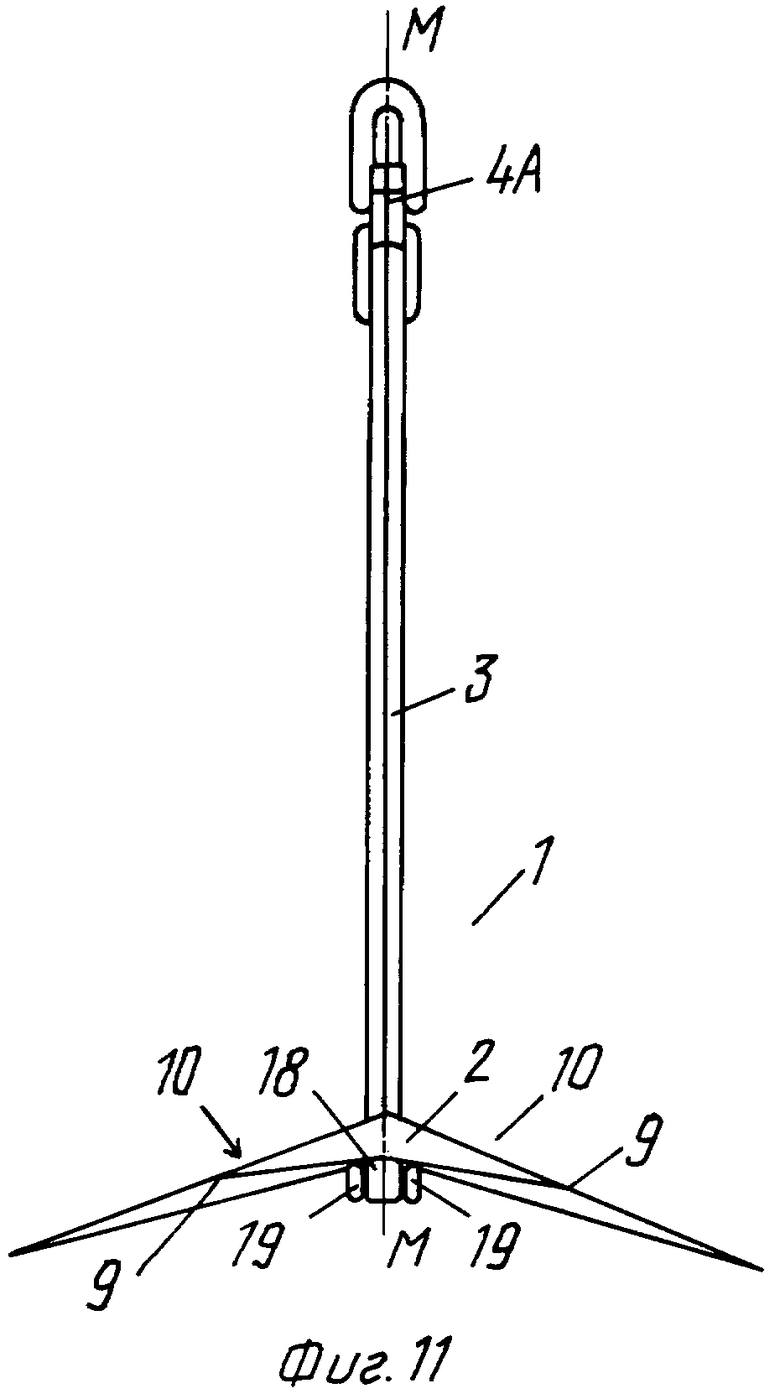
фиг. 9 - 11 - виды, подобные по фиг. 1 - 3 для третьего примера реализации настоящего изобретения, включая качающийся якорный хвостовик,
фиг. 12 - положение деталей якоря по фиг. 9 - 11 после операции разъединяющего качающего хвостовик механизма,
фиг. 13 - альтернативный механизм стопорения качания для якоря по фиг. 9 - 11, и
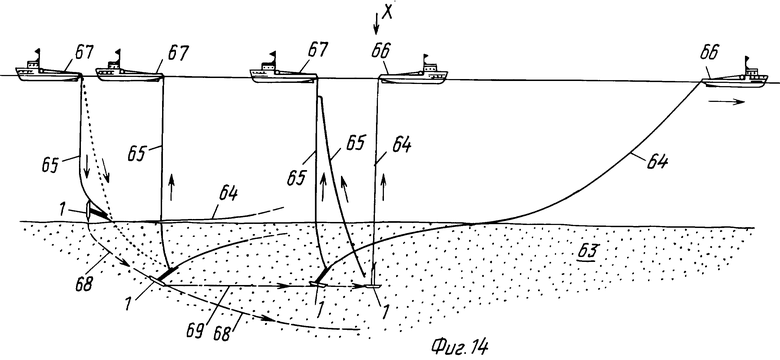
фиг. 14 - вид, показывающий работу устройства по изобретению.
Вариант наилучшего осуществления изобретения
Согласно фиг. 1 - 5 судовой якорь 1 выполнен симметричным относительно продольной плоскости симметрии M-M и содержит лапу 2, хвостовик 3, прикрепленный к лапе 2 вблизи центроида 7 лапы и включающий в себя первую точку 4A прикрепления якорной цепи, имеющую отверстие на конце А хвостовика, удаленном от лапы 2, и вторую точку 4B прикрепления якорной цепи у внешнего конца щелевого отверстия в продольном положении B хвостовика между концами A хвостовика и лапой 2.
Отверстия 4A, 4B служат для размещения в них пальца скобы для прикрепления якорной цепи. Лапа 2 состоит из двух половин 8 лапы, каждая из которых имеет в основном пятиугольную форму в плане вида сверху, с самой передней точкой 9, расположенной с промежутком от плоскости M-M симметрии. При виде спереди плоская верхняя поверхность каждой половины лапы образует угол θ в пределах от 60 до 90o с плоскостью M-M симметрии. Отношение длины к ширине лапы в плоскости составляет предпочтительно от 1 до 2.
Переднее направление F лапы 2 образуется линейным пересечением плоской поверхности 10 с плоскостью M-M симметрии и, в некотором отношении, перемещением от центроида 7 к точке 9 на фиг. 1. Угол α центроида на лапе (первый угол центроида на лапе) представляет собой угол между передним направлением F на лапе 2 и прямой линией 5, включающей в себя центроид 7 и точку 4A прикрепления цепи якоря, и составляет менее (90 - θ)o, где θ представляет собой угол трения между якорем и грунтом, в который его следует внедрять.
Принято, что значение угла θ составляет 30o для песчаного грунта и 15o для илистого грунта для того, чтобы определить угол α. На фиг. 1 показано, что угол α составляет примерно около 70o (для илистого грунта), т.е. менее чем 75o.
Угол δ лапы в точке представляет собой угол между передним направлением F лапы 2 и прямой линией, включающей в себя первую точку 4A прикрепления якорной цепи и выступ точек 9 лапы в плоскости симметрии M-M, и находится в пределах от 90 до 110o для мягкого илистого грунта и от 50 до 70o для песчаного грунта. На фиг. 1 угол δ показан на 100o для илистого донного грунта.
Прямая линия 6, включающая в себя центроид 7 лапы и вторую точку 4B прикрепления якорной цепи, образует с передним направлением F лапы угол β (второй центроидный угол лапы), который находится в пределах (90 ± θ)o. На фиг. 1 угол β показан как угол в 90o как для илистого, так и для песчаного донного грунта.
Точка 4B прикрепления расположена с промежутком над лапой в 25 - 100 процентов от длины лапы для того, чтобы предупредить поворотную неустойчивость лапы 2 вокруг точки 4B, которая возникает вследствие любых изменений распределения давления со стороны грунта на лапу.
Хвостовик 3 выполнен в виде плоской конструкции с толщиной менее чем 5 процентов от ширины лапы и скошен на переднем краю лапы для уменьшения сопротивления проникновению хвостовика в почву донного грунта. При виде сбоку хвостовик 3 выполнен Y-образным с более длинной верхней конечностью 3A, наклоненной приблизительно под углом α к переднему направлению F, и с более короткой верхней конечностью 3B, наклоненной под углом β к направлению F, и с короткой нижней конечностью 3C Y-образной формы, прикрепленной к лапе 2 вблизи центроида 7 лапы.
На виде спереди лапа 2 имеет максимальную глубину сечения в плоскости M-M симметрии и минимальную глубину сечения поодаль от плоскости M-M, представляет собой в основном клинообразную форму у каждой стороны от плоскости M-M и представляет собой полую с двойной обшивкой плоскую конструкцию с минимальной площадью фронтального поперечного сечения для уменьшения до минимума сопротивления проникновению лапы в донный грунт в направлении F.
В общем и целом отношение площади якоря в плане к площади якоря в проекции на направление F максимально согласовано с сохранением адекватного структурного напряжения так, чтобы сопротивление продвижению в направлении F было как можно меньше, в то время как сопротивление перемещению под прямым углом к направлению F было как можно больше.
Конечность 3A хвостовика смонтирована подвижной на конечности 3B хвостовика с помощью пары лап 43, прикрепленных к концу конечности 3A, удаленному от конца A. Лапы 43 расположены между собой с промежутком для того, чтобы разместить их по одной на каждой стороне конечности 3B, и имеют соосные отверстия 44, которые расположены вровень с отверстием 45 в конечности 3B для того, чтобы образовать скобу, и прикреплены шпильками к конечности 3B с помощью двух цилиндрических пальцев 46 (фиг. 4 и 5). Пальцы 46 упираются в два поршня 47, посаженных с масляными уплотнениями 48 и лежащих один против другого, упираясь один в другой в плоскости M-M в центре отверстия 45.
Поршни 47 имеют скосы 49 на лицевых поверхностях, которые образуют кольцевую масляную камеру, снабжаемую маслом через просверленный масляный канал 50, соединенный с питающей маслом трубкой 51.
Ограничители 52 хода пальцев прикреплены болтами к лапам 43 для ограничения выскакивания пальцев 46 под действием давления масла в отверстии 45, когда упирающиеся фаски 53 между пальцами 46 и поршнями 47 выводятся вровень с внешними поверхностями конечности 3B. Фаски 53 удерживаются вместе клейким образом с помощью клея, обладающего низким сдвигающим напряжением, вроде эпоксидной смолы, которая расходится, если к ней приложена небольшая нагрузка от натяжения цепи на первой точке 4A прикрепления якорной цепи, когда фаски 53 находятся вровень с внешними поверхностями конечности 3B.
Конечность 3B хвостовика посажена с помощью скользящей муфты 54, имеющей отверстие 55 для размещения в нем пальца 56 скобы 57 для прикрепления к нему якорной цепи. Отверстие 55 расположено так, чтобы взаимодействовать с щелевым отверстием 4B таким образом, чтобы палец 56, проходящий через отверстие 55 и щелевое отверстие 4B, пронося за собой муфту 54, имел границы скользящего перемещения, определенные щелевым отверстием 4B. Соосные отверстия 58 выполнена в муфте 54 и конечности 3B для размещения в них срезаемого пальца 59, который запирает муфту 54 в положении, при котором палец 55 располагается в конце щелевого отверстия 4B вблизи лапы 2.
Тянущее усилие, превосходящее нагрузку от аварийного среза на срезаемый палец 59 в направлении под прямыми углами к направлению F, будет срезать палец 59 и перемещать палец 55 (и, следовательно, муфту 54) дальше от лапы 2 на величину хода, допускаемую щелевым отверстием 4B. Лапка 60 прикреплена к продольной поверхности муфты 54 и подобная же лапка 61 прикреплена к продольной поверхности конечности 3B.
Наполненный маслом гидравлический цилиндр 62 соединен с лапкой 60 посредством его поршневого штока, соединенного с лапкой 61. Цилиндр 62 сообщен с помощью маслоподающей трубки 51 с просверленным каналом 50 в конечности 3B, благодаря чему перемещение пальца 55 вдоль щелевого отверстия 4B, после срезывания пальца 59, приводит в действие цилиндр 62 и накачивает масло в отверстие 45 между поршнями 47.
Это действие выталкивает пальцы 46 из отверстий 45 и позволяет оттягивать конечность 3A от конечности 3B по мере разъединения клея между упирающимися фасками 53, не допуская восстановления конечности 3A и присоединенной к ней якорной цепи. Альтернативное устройство предусмотрено в таком виде, что механизм выталкивания пальца расположен у точки 4A прикрепления цепи и в якорной скобе, прикрепленной к ней.
В этом случае конечность 3A не может быть восстановлена с помощью якорной цепи и выполнена конструктивно просто как одно целое с хвостовиком 3.
Еще одно устройство предусмотрено в таком виде (см. фиг. 1A - 3A), что механизм полного разъединения для освобождения якорной цепи, прикрепленной к точке 4A, исключен, а точки 4A и 4B имеют только круглые отверстия для размещения в них пальцев скобы. В этом устройстве конечности 3A и 3B выполнены за одно целое с хвостовиком 3, и срезаемый палец скобы в точке 4A позволяет восстанавливать заново первую якорную цепь.
По примеру осуществления по фиг. 6 - 8 вторая точка 4B прикрепления якорной цепи отнесена от лапы на расстояние приблизительно в одну длину лапы и соединена с первой точкой 4A прикрепления якорной цепи с помощью щели 11 в скобе 3 таким образом, что скользящее перемещение в ней пальца скобы переносит якорную цепь, прикрепленную в нему, из точки 4A в точку 4B.
Ось щели 11 пересекает центр отверстия скобяного пальца в точке 4A, но пересекает отверстие скобяного пальца в точке B, смещенной в сторону лапы 2 таким образом, что палец скобы может разместиться под действием нагрузки на отверстие в точке 4B. В основном этот якорь соответствует якорю, показанному на фиг. 1 - 3, а подобные детали имеют такие же номера позиций. Хвостовик 3 выполнен треугольной формы, при виде сбоку, с треугольным в нем отверстием 12, служащим для снижения веса.
Лапка 13, имеющая отверстие 14, прикреплена к хвостовику 3 смежно с точкой 4B прикрепления якорной цепи для того, чтобы разместить в ней палец скобы для прикрепления таким образом якорного шкентельного троса. Якорь по фиг. 6 - 8, вероятно, будет более подходящим для применения более легкой нагрузки, например, для яхт и небольших катеров.
По примеру реализации, показанному на фиг. 9 - 13, первая точка 4A прикрепления якорной цепи физически подвижна благодаря действию хвостовика 3, который имеет возможность поворачиваться вокруг точки вращения 15 в лапе 2 так, что точка 4A может перемещаться с линии 5 на линию 6, чтобы стать точкой 4B, соответствующей точке 4B на фиг.4. Этот якорь соответствует якорю, показанному на фиг. 1 - 3, и подобным его деталям присвоены подобные позиции.
Точка качания 15 имеет ось 16, которая нормальна к плоскости M-M симметрии и расположена в лапе 2 вдоль центроида 7 лапы якоря под плоскими поверхностями 10. Палец 17 качания служит для расположения лапки 18, включая конец хвостовика 3, удаленный от конца A хвостовика, между двумя лапками 19, прикрепленными с изнанки к лапе якоря. Хвостовик 3 проходит через отверстие 20, выполненное в лапе 2, по переднему краю 21 отверстия 20, упирающегося в передний край 22 хвостовика 3, при этом край 21 служит в качестве стопора для прекращения поворота хвостовика 3, который формируется, образуя угол α центроида лапы, который меньше чем тот, что задан для примера осуществления по фиг. 1 - 3.
Задний край 23 отверстия 20 и стопор 24, прикрепленный к лапе 2, могут упираться в задний край 25 хвостовика 3, чтобы ограничить поворот хвостовика 3 от образования угла β, большего, чем задано для примера осуществления по фиг. 1 - 3. Клинообразный стопор 26, несущий скобу 27 для пальца и палец 28, подвижно расположен в промежутке между краем 25 хвостовика 3 и стопором 24 для запирания на время хвостовика 3 с точкой 4A на линии 5.
Стопорный съемный рычаг 29 прикреплен с возможностью качания на одном конце с помощью пальца 28 к скобе 27 на клинообразном стопоре 26 и откладывается по длине вдоль заднего края 25 хвостовика 3. Носок 30 образован на рычаге 29 смежно с пальцем 28, он может нагружать стопор 24 после поворота рычага 29 от края 25 хвостовика и, в свою очередь, действует как точка опоры для дальнейшего поворота рычага 29, чтобы насильно поднять рычажным действием клиновой стопор 26 из его положения между стопором 24 и краем 25, позволив хвостовику 3 повернуться до упора в стопор 24 и, таким образом, вынести точку 4A с линии 5 и перенести ее на линию 6.
Упруго нагруженный клиновой стопор (не показан) под лапой якоря теперь свободен для перемещения вверх между краем 21 и краем 22, чтобы запереть хвостовик 3 с точкой 4A в месте расположения точки 4B на линии 6. Альтернативное стопорное и запирающее устройство для хвостовика 3 показано на фиг. 13, где предусмотрен кривоколенный рычаг 31, который опирается на плиту 32 лапы якоря под стопором 24, ограничивая хвостовик 3 в сторону поворота вместо края 22, опирающегося на край 21.
Отверстие 33 предусмотрено у самой крайней точки рычага 31, оно сходится вровень с соответствующим отверстием 34 на лапках 19, когда хвостовик 3 поворачивается, приводя край 25 до упора со стопором 24. Упруго нагруженный болт 35 смонтирован в отверстии 34 в одной из лапок 19, он входит в отверстие 33, когда сравняется с отверстием 34, запирая хвостовик 3 на лапках 19 с точкой 4A прикрепления якорной цепи в положении 4B (фиг. 12 и 13), и ляжет на линии 6.
Другое отверстие 36 предусмотрено на рычаге 31, оно находится изначально вровень с соответствующими соосными отверстиями в лапках 19. Срезаемый палец 37 может быть посажен в отверстии 36 для запирания хвостовика 3 на лапках 19, когда точка 4A первоначально находится на линии 5, благодаря чему превышение определенного момента силы вокруг оси качания 16 срезает палец 37 и таким образом позволяет хвостовику 3 повернуться назад.
Хвостовик 3 имеет скобяные лапки 38 с соосными отверстиями 39, расположенными на заднем краю 25, расположенные от точки 4A приблизительно на расстоянии 20 процентов от длины хвостовика. Рычаг 29 (фиг. 12 и 13) имеет длину около 0,8 от длины хвостовика 3 и имеет отверстие 41 на лапке у конца, удаленного от носка 30 для размещения в нем пальца скобы и для присоединения к нему якорного шкентельного троса. Рычаг 29 имеет также отверстие 40 для соосной разметки между лапками 38 и отверстиями 39.
Срезаемый палец 42 посажен через отверстия 39 и 40 и выполнен с возможностью торможения определенной силой, приложенной к отверстию 40 при оттягивании вверх якорного шкентельного троса. Дальнейшее оттягивание вверх якорного шкентельного троса отводит рычаг 29 и клинообразный стопор 26 в собранном виде от внедренного в грунт якоря 1. Это позволяет, чтобы угол центроида лапы якоря увеличился с α до β под действием поворотного момента вокруг оси качания 16 от сил грунта, распределенных по поверхности 10 лапы 2 якоря, создавая эффективное действие на центроиде 7 лапы якоря.
Согласно теперь фиг. 14 и 1 - 12, при использовании якоря, согласно настоящему изобретению его устанавливают на подводной якорной стоянке 63 с помощью двух тросов 64, 65, прикрепленных к нему тросом 64, прикрепленным в точке 4A, и тросом 65, прикрепленным в отверстии 4B с помощью скобы 57 по примеру осуществления на фиг. 1 - 3 или прикрепленным в отверстии 14 по примеру реализации на фиг. 6 - 8 или прикрепленным в отверстии 41 по примеру реализации по фиг. 9 - 11.
Якорь 1 развертывают с палубы первого управляющего якорем судна 66, который травит якорную цепь 64 со своего барабана лебедки. Шкентельный трос 65 проводит ко второму управляющему якорем судну 67, который тянет якорь с палубы судна 66 в воду над местом якорной стоянки. Якорь 1 погружают до касания с поверхностью грунта якорной стоянки 63 при управляемом травлении двух якорных тросов 64 и 65 таким образом, чтобы якорь 1 касался своей лапой донного грунта на якорной стоянке 63, сначала с направлением F, выровненным с требуемым плавучим курсом на якорной стоянке.
Эта точка касания выбрана достаточно удаленной от требуемого местоположения X стоянки, чтобы, по всей вероятности, было достигнуто требуемое натяжение на якорной цепи 64 или чтобы оно превышало оттаскивание якоря 1 к положению X с помощью якорной цепи 64. Дальнейшее распускание якорной цепи, связанной с горизонтальным перемещением судна 66, поворачивает якорь 1, перенося конец A хвостовика в касание с поверхностью донного грунта, и укладывает якорную цепь 64 горизонтально на донный грунт 63 якорной стоянки в требуемое направление тяги.
Судно 67 теперь медленно травит трос 65, пока в это время судно 66 тянет горизонтально, чтобы заставить якорь 1 погрузиться в донный грунт якорной стоянки и следовать по закапывающей траектории 68, что, в свою очередь, вызывает повышение натяжения якорной цепи 64 по мере того, как якорь 1 приближается к требуемому месту X стоянки.
Если нарастание натяжения на якорной цепи 64, замеренное на судне 66, показывает, что требуемое натяжение будет превышено до того, как якорь 1 достигнет места X стоянки, то судно 66 дает указания судну 67 натянуть шкентельный трос 65, чтобы повернуть якорь 1 в грунте якорной стоянки для уменьшения наклона лапы 2 якоря к горизонтали, чтобы таким образом уменьшить закапывающую способность якоря и, следовательно, сдерживающую способность якоря 1 в то время, пока его протаскивают в направлении к месту X стоянки.
Благодаря такому взаимодействию между судами 66 и 67, якорь 1 можно протаскивать при управляемом постоянном натяжении на якорной цепи 64 и таким образом проводить по горизонтальной траектории 69 на причальной стоянке до тех пор, пока не будет достигнуто место X стоянки.
Для примера осуществления по фиг. 1 - 3 после внедрения якоря в грунт на месте X стоянки судно 66 ослабляет затем натяжение якорной цепи 64, в то время как судно 67 усиленно натягивает трос 65, разрывая срезывающий палец 59 и приводя в действие гидравлический разъединяющий механизм, описанный здесь ранее, для освобождения от якоря 1 конечности 3A хвостовика вместе с прикрепленной якорной цепью 64. Судно 66 оттаскивает якорную цепь 64, чтобы восстановить ее вместе с конечностью 3A хвостовика для последующего повторного использования, и снимается со стоянки. Затем судно 67 прикладывает более вертикальную тянущую силу в точке 4B на якоре 1, чтобы повернуть лапу 2 якоря до тех пор, пока переднее направление F не станет горизонтальным, чтобы приобрести вертикальную противодействующую подъему нагрузку, которая значительно выше, чем горизонтальная нагрузка, приложенная со стороны судна 66, если требуется высокое сопротивление подъему.
Альтернативно судно 67 травит трос 65 и перемещается на место стоянки, освобожденное судном 66, и прикладывает к тросу 65 высокую горизонтальную тянущую силу, поворачивая якорь 1 таким образом, что переднее направление F лапы якоря находится под прямыми углами к оси троса 65 в точке 4B, приобретая горизонтальную противодействующую нагрузку на якорной цепи 65, которая значительно выше, чем горизонтальная нагрузка, прикладываемая от судна 66, если требуется горизонтальное сдерживание.
Для примера реализации по фиг. 6 - 8 со срезываемым пальцем скобы, посаженным в отверстие 14, после внедрения якоря 1 в грунт в месте X стоянки судно 67 сильно оттягивает трос 65, разрывая срезываемый скобяной палец и разъединяя трос 65 для его последующего восстановления на борту. Затем судно 67 снимается со стоянки. Судно 66 вытаскивает якорную цепь 64, движется вдоль кормы якоря 1 и с силой оттягивает якорь вверх и назад, чтобы заставить скобу, прикрепляющую якорную цепь 64 к точке 4A, проскользнуть вдоль щели 11 и разместить скобяной палец в смещенном отверстии в точке 4B.
Чтобы достичь высокой вертикальной одерживающей нагрузки на якорной цепи 64, судно 66 перемещается затем сверху над якорем 1 и усиленно натягивает якорную цепь 64, поворачивая якорь под действием нагрузки, приложенной в точке 4B, перенося при этом лапу якоря по переднему направлению F в горизонталь.
Альтернативно для того чтобы достигнуть высокой горизонтальной сдерживающей нагрузки на якорной цепи 64, судно 66 травит якорную цепь 64 и отодвигается назад над якорем 1 снова в положение, которое оно занимало, когда якорь 1 в первый раз достиг места X якорной стоянки. Судно 66 затем сильно натягивает по горизонтали якорную цепь 64, поворачивая якорь 1 путем приложения нагрузки в точке 4B до тех пор, пока переднее направление F лапы якоря не примет, при прямых углах, направление якорной цепи 64 смежно с точкой 4B.
Для примера реализации по фиг. 9 - 13, после внедрения якоря 1 в донный грунт в месте X стоянки судно 67 сильно тянет трос 65, разрывая режущий палец 42, чтобы повернуть рычаг 29, поднять рычаг клинового стопора 26 для освобождения стопора 24 и хвостовика 3 и снять рычаг 29 в собранном виде с якоря 1 для возращения троса 65 и рычага 29 на борт судна.
Для того чтобы достичь высокой вертикальной сдерживающей нагрузки на якорной цепи 64, судно 66 перемещается сверху над якорем 1 и усиленно натягивает якорную цепь 64, чтобы повернуть хвостовик 3 до упора со стопором 24 и затем повернуть якорь 1, перенося переднее направление F лапы якоря в горизонталь.
Альтернативно, чтобы достичь высокой горизонтальной сдерживающей нагрузки на якорной цепи 64, судно 66 просто усиленно натягивает цепь 64 после снятия клинообразного стопора 26, заставляя лапу 2 якоря повернуться вокруг оси 16 качания благодаря смещенному моменту грунтовых сил на лапе 2 якоря, действующих на центроиде 7 до тех пор, пока стопор 24 не упрется в хвостовик 3, под действием чего переднее направление F лапы якоря оказывается при прямых углах в направлении якорной цепи 64 смежно с концом A хвостовика.
Опытным путем в баке, наполненном очень мягким илистым грунтом, с использованием масштабно моделированных по подобию якорей, сконструированных в соответствии с настоящим изобретением и использованных как описано выше, было установлено, что пиковая нагрузка, получаемая на шкентельном тросе 65, может быть такой, что, если она в пять раз выше, чем пиковая горизонтальная сила на якорной цепи 64, потребная для внедрения якоря в грунт, то в то же время точки 9 лапы якоря приблизительно в пять раз по длине лапы 2 станут ниже поверхности илистого грунта.
В песчаном грунте подобные испытания показали, что пиковая нагрузка на шкентельном тросе 65 может быть настолько выше, что, если она больше примерно в два с половиной раза, чем горизонтальная сила на якорной цепи 64, потребная для внедрения якоря в донный грунт, то точки 9 лапы якоря будут приблизительно в два с половиной раза по длине лапы ниже поверхности песчаного грунта.
Эти полезные результаты до сих пор не достигались для волочильных внедренных в грунт якорей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННЫЙ ПРИБРЕЖНЫЙ МОРСКОЙ ЯКОРЬ | 2012 |
|
RU2607895C2 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ СОСТОЯНИЯ МОРСКОГО ДНА В МЕСТАХ ВНЕДРЕНИЯ В НЕГО ЯКОРЯ | 1996 |
|
RU2166454C2 |
| ЯКОРЬ ДЛЯ МОРСКИХ СУДОВ | 1992 |
|
RU2111886C1 |
| СУДОВОЙ ЯКОРЬ | 1990 |
|
RU2013288C1 |
| Устройство для испытания судовогояКОРНОгО МЕХАНизМА | 1979 |
|
SU851147A1 |
| СПОСОБ ПОСТАНОВКИ БУРОВОГО СУДНА С ТУРЕЛЬЮ НА ЯКОРНО-ШВАРТОВНУЮ СИСТЕМУ В ЛЕДОВЫХ УСЛОВИЯХ | 2018 |
|
RU2676927C1 |
| Якорное устройство | 1984 |
|
SU1189730A1 |
| СУДОВОЕ ЯКОРНОЕ УСТРОЙСТВО ГИРЛЯНДНОГО ТИПА | 2020 |
|
RU2742667C1 |
| ЯКОРНОЕ УСТРОЙСТВО СУДНА | 2014 |
|
RU2566797C1 |
| Якорное устройство для низкобортных судов | 1981 |
|
SU962091A1 |








Изобретение относится к водному транспорту и касается создания судовых якорей для волочильного внедрения в донный грунт. Якорь имеет лапу и хвостовик. В первом варианте выполнения хвостовик имеет две раздельные точки крепления первой и второй якорных цепей. Якорь имеет возможность ориентирования для обеспечения прямых линий в первом и втором направлениях, которые образуют соответственно углы α и β с линией пересечения плоской поверхности лапы с продольной плоскостью ее симметрии. Угол β больше угла α так, что площадь лапы, проектируемая во втором направлении, больше, чем в первом, для обеспечения ограничивающей нагрузки якорем, внедренным в грунт при тяговом усилии, прилагаемом по второй якорной цепи и точке ее крепления. При втором варианте выполнения хвостовик якоря прикреплен к лапе вблизи или позади ее центроида. Хвостовик имеет качающуюся часть с точкой крепления якорной цепи. Эта точка может перемещаться между прямыми линиями первого и второго направлений якорной цепи и находиться на указанных линиях при качании части хвостовика вокруг поперечной оси качания. Якорная цепь оказывает тянущее воздействие на якорь, когда точка крепления цепи находится на линии первого направления, служащей для волочильного внедрения. Величины и ориентация раскрытия углов α и β, а также соотношение площадей лапы, проектируемых в первом и втором направлениях, те же, что и при первом варианте, что обеспечивает ограничивающую нагрузку якорем. Технический результат внедрения - повышение эксплуатационных качеств якоря. 2 с. и 20 з.п.ф-лы, 17 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 3685479A, 22.08.72 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 3407775A, 29.10.68. | |||
