Настоящее изобретение относится к устройству и способу оценки состояния морского дна в местах внедрения в него якоря.
При протаскивании судами внедренных в морское дно якорей желательно знать технические характеристики грунта дна в координатных точках на траектории, по которой ожидается перемещение каждого якоря, по мере его внедрения в грунт, при приложении большого, практически горизонтального тягового усилия к подсоединенному к якорю тяговому тросу.
Экспериментально доказано, что при протаскивании внедренных в дно якорей самых современных конструкций якорной цепью, они перемещаются по траектории с внедрением в грунт дна на расстояние, кратное до пяти длин лапы якорей ниже поверхности часто встречающегося, обычно уплотненного глинистого морского дна, градиент сопротивления сдвигу которого составляет 1,6 кПа/м (0,011 кгс/см2/м; где кПа - килоПаскаль). При протаскивании якорей многожильным канатом, диаметр которого составляет одну треть воображаемого граничительного цилиндра, включающего якорную цепь, якоря движутся по траектории, где они внедряются в грунт на глубину, кратную до девяти длин лапы якоря. Используемые в настоящее время самые крупные якоря имеют длину лапы около 6 метров и протаскиваются в дне многожильным канатом, при этом траектория внедрения якоря в грунт образует кривую, наклон которой по отношению к горизонтали постепенно уменьшается от 50o в точке начала внедрения до горизонтального положения, в котором максимальное удерживающее усилие, обеспечиваемое якорем, адекватно около 40-кратному весу якоря, что имеет место после горизонтального перемещения якоря на 300 м и его вертикального внедренияи в грунт на почти 54 м. Таким образом, желательно иметь технические данные, характеризующие состояние грунта морского дна в местах ожидаемого внедрения в него якоря в вертикальной плоскости, простирающейся на 300 м вдоль поверхности дна и на 54 м ниже этой поверхности, в каждой из двенадцати, расположенных в этой плоскости широко расставленных позиций точек, для возможности прогнозирования каждого участка траектории перемещения якоря.
Ранее, технические данные о грунтах с глубоко внедренными якорями получали при проведении дистанционных исследований грунта на сдвиг с использованием лопаток бура и дистанционных исследований с применением конического пенетрометра в сочетании с лабораторными исследованиями, проводимыми на образцах грунта, отобранных из небольшого количества скважин, пробуренных в заякоренном грунте в выбранных местах. Эти исследования и отборы проб проводились для глубин до 60 м или более ниже поверхности морского дна в каждой из выбранных позиций для получения трехмерной системы данных о грунте на соответствующем участке. Однако, вследствие очень высокой стоимости проведения таких исследований, количество тестируемых таким образом участков неизменно уменьшалось до минимума. Интерполяция небольшого количества данных для большой исследуемой зоны связана с неясностью в отношении состояния грунта в зонах между выбранными исследованными участками. Это, в свою очередь, ведет к неуверенности в прогнозировании поведения и траектории внедренного в грунт якоря между упомянутыми выбранными участками.
До сих пор также измеряли траектории внедрения в грунт якоря. Горизонтальные координаты на упомянутой траектории определяли по приблизительным горизонтальным смещениям якоря, которые, в<свою очередь, определялись измерением соответствующих горизонтальных смещений отмеченной точки на горизонтальном участке тягового троса, который не был погружен под поверхность морского дна. Соответствующие вертикальные координаты определяли либо непосредственно путем использования тонкого троса, прикрепленного к якорю, который тянули вертикально вверх с целью измерения глубины его проникновения ниже поверхности дна, или косвенно с использованием установленного на якоре датчика давления для измерения статического давления столба воды от внедренного в дно якоря до поверхности моря, осуществляемого с помощью гибкой трубы, служащей для направления столба воды от поверхности дна до якоря. К недостаткам указанных известных непосредственных измерений следует отнести отсутствие уверенности в том, что тонкий трос при его тяге вверх натягивается достаточно для занятия им действительно вертикального положения в грунте, не мешая при этом погруженному в грунт якорю и не требуя нескольких повторений этой операции. К недостаткам указанного косвенного способа измерений следует отнести сомнения в достижении конечных результатов, вызываемые существованием изменений давления, вследствие длительных волнений на поверхности моря, и возможности закупорки направляющей трубы для водяного столба из-за прогиба ее стенки, вследствие давления грунта или попадания грунта через ее свободный конец.
Целью настоящего изобретения является обеспечение погружаемого в грунт при тяге якоря устройства, способного определить траекторию глубокого внедрения или погружения в грунт якоря и одновременно создающего горизонтальное сопротивление внедрению в грунт, которое практически меньше сопротивления, создаваемого внедряемым в грунт якорем и его тросом. Другой целью настоящего изобретения является обеспечение устройства для измерения данных, характеризующих траекторию внедрения якоря в грунт, по которой следует точка на упомянутом устройстве, погружающемся в заякоренный грунт. Другой целью настоящего изобретения является обеспечение устройства для измерения технических характеристик указанного грунта в характерных точках на указанной траектории, прокладываемой якорем, по которой следует упомянутая точка на указанном погружающемся вместе с якорем в грунт устройстве. Другой целью настоящего изобретения является обеспечение способа оценки внедряемости якоря в грунт путем интерпретации (преобразования параметров в сигналы с показом на дисплее) формы траектории внедрения якоря.
В соответствии с первым аспектом настоящего изобретения устройство для измерения параметров, характеризующих траекторию внедрения якоря, следующее по образуемой якорем траектории в грунте, содержит средства оценки, включающие корпус, установленный на или включенный в якорь, внедряемый по указанной траектории в грунт дна, причем средства оценки указывают позицию точки в грунте, находящейся на указанном погружающемся устройстве или корпусе в течение внедрения якоря в грунт, отражая таким образом путь следования указанной точки по указанной траектории, причем средства оценки включают измерительные средства, реагирующие на перемещение погружающегося устройства, с целью измерения смещения указанной точки, движущейся по указанной траектории.
В соответствии с предпочтительным воплощением устройство для определения и характеристики траектории внедрения якоря в грунт содержит обладающие признаками изобретения указанные измерительные средства, включенные в якорь, который, в свою очередь, содержит многожильный тяговый канат, закрепленный на одном конце его вытянутого хвостовика, где другой конец хвостовика прикреплен к лапе якоря, которая внедряется в грунт по траектории, лежащей в вертикальной плоскости, в которой расположен указанный хвостовик, где минимально проектируемая площадь хвостовика и лапы якоря по направлению, показанному стрелкой F на фигуре 2 и находящемуся в указанной плоскости, не превышает 20% (предпочтительно не более 10%), соответствующей максимальной площади этих элементов проектируемой под прямыми углами к упомянутому направлению в указанной плоскости.
Предпочтительно, указанные измерительные средства служат для измерения расстояния вдоль траектории, разделяющего две находящиеся на ней точки, и дополнительного измерения любого из параметров, а именно:
а) уклона траектории в соответствующей точке на ней;
b) горизонтального или вертикального смещения указанной точки относительно заданной базовой величины.
Указанные измерительные средства включены предпочтительно в указанный корпус.
Корпус, предпочтительно, выполнен удлиненным и полым, будучи шарнирно, т. е. с возможностью поворота, присоединен к указанной точке на якоре, благодаря чему он может самовыравниваться в упомянутой траектории вдоль оси.
К корпусу, предпочтительно, прикреплен линейный элемент, который может двигаться сзади корпуса, совпадая с указанной траекторией, по мере внедрения якоря в грунт.
Корпус имеет, предпочтительно, внутренний отсек, содержащий средства для размещения указанного линейного элемента.
Конец линейного элемента, удаленный от места крепления этого элемента к корпусу, крепится к резистивному элементу, расположенному снаружи корпуса и оказывающему сопротивление проникновению в грунт, при этом оставаясь на поверхности заякоренного грунта, по мере движения указанного корпуса вдоль указанной траектории, благодаря чему линейный элемент вытягивается из корпуса так, чтобы совпадать с указанной траекторией, т.е. располагаться в ней.
Указанные средства для измерения расстояния между точками вдоль указанной траектории приводятся, предпочтительно, в действие указанным линейным элементом по мере его выхода из указанного корпуса.
Указанные средства для измерения расстояния между точками вдоль указанной траектории содержат, предпочтительно, шкив, установленный в корпусе с возможностью поворота при прохождении по нему указанного линейного элемента по мере его вытягивания из корпуса, и магнит, орбитально вращаемый указанным шкивом с целью включения чувствительного к магнитному полю (далее электромагнитного) выключателя, расположенного в указанном корпусе, с целью получения электрического выходного импульса, который определяет последовательные точки, находящиеся друг от друга на заданном расстоянии на указанном линейном элементе, попадающим в указанную траекторию по мере поворачивания шкива этим линейным элементом.
Указанные измерительные средства, служащие для получения данных, из которых в соответствующей точке, расположенной на траектории, может быть определен угол уклона траектории, содержат, предпочтительно, электрический уклономер, жестко прикрепленный к указанному корпусу, импульс на выходе из которого образуется с использованием определяющего положение точки импульса из указанного электромагнитного выключателя, имеющегося в корпусе.
Уклономер содержит, предпочтительно, акселерометр (измеритель ускорения), предназначенный для выдачи на выходе напряжения, пропорционального ускорению свободного падения и косинусу угла наклона акселерометра относительно горизонтали.
Корпус, предпочтительно, содержит электроприводной регистратор (самописец) данных для накопления измеренных параметров, характеризующих угол уклона всех определенных импульсами точек, находящихся на заданном фиксированном расстоянии друг от друга вдоль указанного линейного элемента, попадающего в указанную траекторию.
Сборные средства для указанного линейного элемента содержат, предпочтительно, катушку с винтовой намоткой этого линейного элемента, вытягиваемого наружу изнутри катушки.
Упомянутый внутренний отсек корпуса, включающий указанные сборные средства, заполнен веществом, подобным смазке.
Указанный отсек закрывается на одном конце уплотненно скользящим поршнем, предусмотренным с отверстием, тесно облегающим линейный элемент, который выходит через него, вследствие чего поршень, который движется выходящим через него линейным элементом, создает давление, по мере выхода линейного элемента, благодаря чему устраняется перепад давления через поршень и, тем самым, предотвращается попадание грунта в указанный отсек.
Линейный элемент содержит, предпочтительно, электрический провод, который дополнительно служит для передачи данных посредством электрических сигналов из корпуса вдоль участка траектории к акустическому импульсному повторителю, смежному с поверхностью дна, благодаря которому характеризующие траекторию данные передаются к приемнику, смежному с поверхностью моря.
Далее, указанные средства для измерения расстояния между точками вдоль указанной траектории содержат, предпочтительно, турбинные лопатки, установленные на валу, выступающем из указанного корпуса, и закрепленный на валу магнит, вращаемый указанным валом с целью включения электромагнитного выключателя, расположенного в корпусе, для выдачи на выходе электрического импульса, который определяет последовательные точки, расположенные на заданном фиксированном расстоянии друг от друга вдоль указанной траектории, по мере вращения вала, которое обеспечивается за счет давления грунта на указанные лопатки при движении указанного корпуса через грунт вдоль указанной траектории.
Предпочтительно, указанное погружаемое устройство включает средства для измерения такого параметра грунтов, как сопротивление вдавливанию (проникновению).
Указанные средства для измерения упомянутого параметра грунтов содержат, предпочтительно, электросчитываемый пенетрометр, предназначенный для измерения сопротивления вдавливанию указанного грунта.
В соответствии с дальнейшим аспектом настоящего изобретения способ получения данных для оценки внедряемости якоря в грунт морского дна содержит этапы:
(а) помещение на дно устройства для определения и характеристики траектории внедрения якоря в грунт и его тягу практически в горизонтальном направлении с помощью прикрепленного к нему троса до тех пор, пока не будет записан с помощью сигналов требуемый участок траектории внедрения в грунт;
(b) воспроизведение следа указанной записанной траектории;
(с) исследование указанного следа с целью идентификации расположенных на нем точек, где происходят быстрые изменения уклона, которые означают быстрые изменения параметров грунта, пересечения поверхностей разделов между слоями или зацепление на препятствиях, все из которых влияют на скорость внедрения якоря в грунт.
Воплощения настоящего изобретения будут описаны ниже на примере со ссылкой на приложенные чертежи, на которых:
фиг. 1 схематично изображает устройства оценки заякоренного морского дна в работе;
фиг. 2 - частичный вид сбоку в разрезе внедряемого якоря с установленным на нем устройством для измерения характеристик траектории внедрения якоря;
фиг. 3 - вид снизу на якорь с указанным устройством по фиг.2, иллюстрирующий его максимально выступающие части;
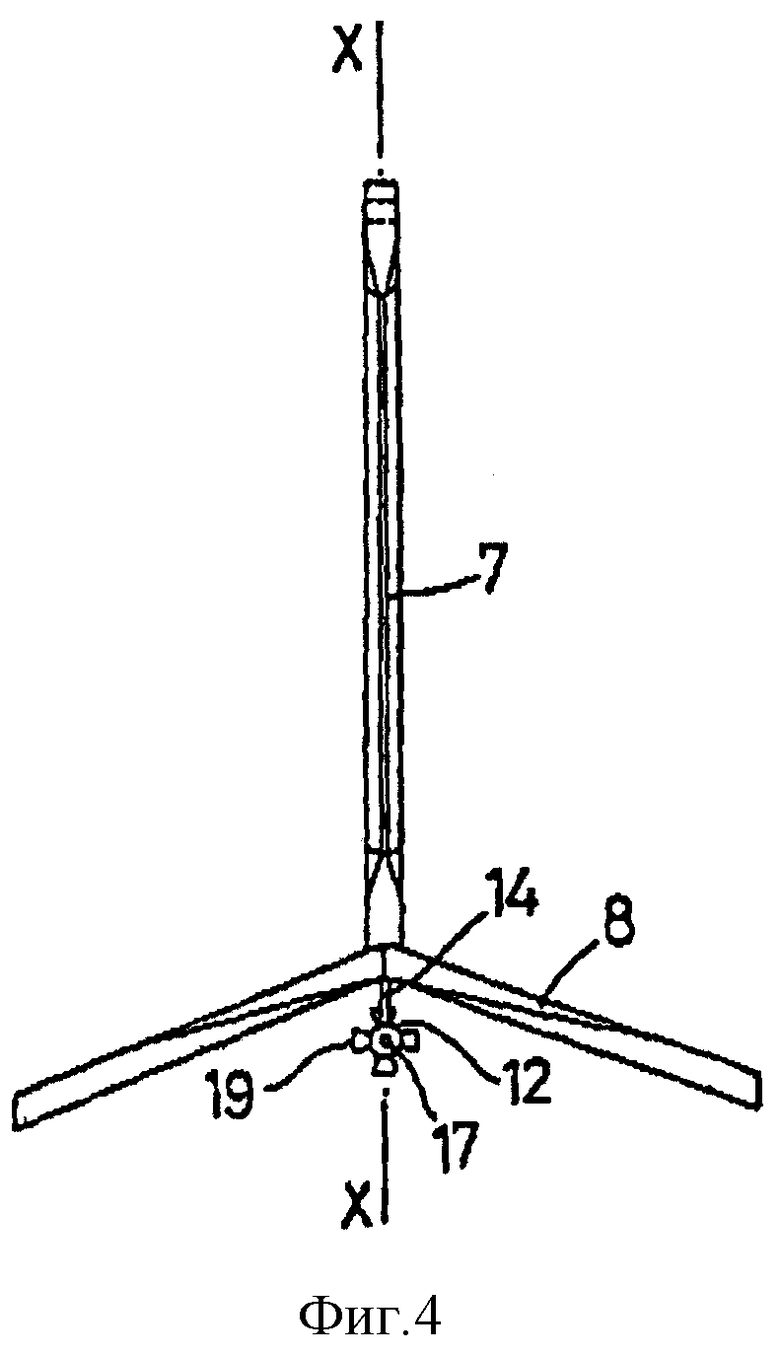
фиг. 4 - вид спереди на устройство по фиг.2, если смотреть на него под прямыми углами в направлении изображения на фиг.3, где видна его минимально выступающая часть;
фиг. 5 - вид сбоку с частичным разрезом устройства для измерения характеристик траектории якоря в дне и части якоря, показанного на фиг.2;
фиг. 6 - вид спереди на устройство для измерения характеристик указанной траектории;
фиг.7 - вид сбоку в разрезе альтернативного хвостового участка устройства для измерения характеристик траектории, показанного на фиг.5.
На фиг. 1 показано устройство 1 для определения и характеристики траектории 2 внедрения якоря 5 в грунт 3 морского дна, которое содержит средство 4 для измерения характеристик указанной траектории, подсоединенное к точке P на якоре 5, к хвостовику 7 которого с одного конца шарнирно прикреплен относительно тонкий, многожильный канатный трос 6, и где другой конец хвостовика 7 прикреплен к лапе 8 якоря, посредством которой якорь внедряется через поверхность 9 грунта 3 морского дна при его тяге в горизонтальном направлении морским судном 10, находящимся на поверхности 11 моря.
Траектория 2, лежащая в вертикальной плоскости, в которой находится хвостовик 7 якоря, начинается у поверхности 9 дна, идя сначала под углом 50o к горизонтали. Затем уклон траектории 2 постепенно уменьшается до занятия ею горизонтального положения на глубине D внедрения якоря ниже поверхности 9 дна. Если продольную длину лапы 8 якоря обозначить буквой L, то в обычно уплотненном глинистом грунте с градиентом сопротивления сдвигу, составляющем 1,6 кПа/м (0,011 кгс/см/м), глубина D может составлять от 9L до 18L, а траектория 2 станет горизонтальной после протаскивания якоря 5 на расстояние приблизительно 40-50L, измеренное по горизонтали.
Обращаясь к фиг. 1-4, якорь 5 выполнен с минимально проектируемой площадью каждого его компонента, видимых, если смотреть в направлении стрелки F (фиг. 2). Лапа 8 длиной L имеет максимально проектируемую площадь A (фиг. 3), видимую, если смотреть под прямыми углами к направлению F в продольной центральной плоскости X-X (фиг. 3 и 4), в которой находится хвостовик 7 якоря. Диаметр многожильного канатного троса 6 не превышает величину A/24L и, предпочтительно, не превышает A/37L.
Хвостовик 7 и лапа 8 якоря выполнены обтекаемыми и имеют острые передние режущие кромки для сведения до минимума сопротивления грунта внедрению в него якоря. Минимально проектируемая в направлении F площадь хвостовика 7 не превышает 0,2A и, предпочтительно, не превышает 0,12A, при этом предпочтительно, чтобы минимально проектируемые в направлении F площади хвостовика 7 и лапы 8 якоря в комбинации не превышали 0,2A и, предпочтительно, не превышали 0,12A. Сечения лапы 8 в плоскостях, параллельных плоскости X-X, имеют практически форму клина с передним острым углом, не превышающим 10oC, и, предпочтительно, не превышающим 6oC. Максимальная высота сечений, смежных с плоскостью X-X, не превышает 0,15L и, предпочтительно, не превышает 0,07L. Такие размерные ограничения якоря 5 позволяют ему внедряться в грунт на очень большие глубины - между 9L и 18L - ниже поверхности 9 дна в упомянутый мягкий глинистый грунт при относительно низком горизонтальном тяговом усилии, прикладываемом к многожильному канату 6 морским судном 10.
Как показано на фиг. 2, 3 и 4, средство 4 для измерения характеристик траектории включает полый закрытый цилиндрический металлический корпус 12, передний конический носовой участок 13 которого, прикрепленный к проушине 14, выступающей из переднего участка нижней поверхности лапы 8 якоря 5, с помощью шарнира 15 в точке P, позволяет корпусу 12 автоматически выравниваться с траекторией 2 при столкновении с нетронутым грунтом.
На фиг. 5 и 6 более подробно показана конструкция средства 4. На коническом носовом участке 13 корпуса 12 укреплен трубчатый зонд 16, который несет известный промышленный конус-пенетрометр 17 в спокойном грунте впереди корпуса 12, причем конус пенетрометра симметричен вдоль оси. Пенетрометр 17 выдает на выходе электрический сигнал, пропорциональный давлению грунта на него. На валу 20, выступающем вдоль оси из конического заднего участка 21 корпуса 12, установлен турбинный ротор 18 с четырьмя радиальными равноудаленными лопатками 19. Вал 20 также выступает вперед во внутреннюю полость 22 в корпусе 12. Площадь, скошенная турбинными лопатками 19, превышает максимальную площадь поперечного сечения корпуса 12 настолько, чтобы гарантировать столкновение проходящего грунта 3 с лопатками 19 с целью вращения ротора 18 и вала 20, по мере движения точки Р вдоль траектории 2 (фиг.2), вследствие тягового усилия, оказываемого на канат 6. Вал 20 установлен в уплотнениях 23 и подшипниках скольжения 24, впрессованных в хвостовой участок 21 корпуса 12. Установленный на валу 20 в полости 22 диск 25 несет магнит 26. Электромагнитный выключатель 27, работающий на эффекте Холла, установлен внутри полости 22 смежно с диском 25 таким образом, чтобы при прохождении магнита 26 мимо выключателя 27, по мере вращения вала 20, выдавался электрический импульс за каждый оборот турбинного ротора 18. Этот импульс обозначает, таким образом, последовательно достигаемые, равноудаленные друг от друга точки на траектории 2 с расстоянием между ними, определенным шагом, выбранным для турбинных лопаток.
В полости 22 корпуса 12 расположены известные акселерометр с напряжением на выходе, действующий как быстрореагирующий уклономер 28, регистратор (самописец) 29 данных и батарейный источник 30 энергии. Уклономер 28 установлен так, что его вертикальная ось лежит в продольной плоскости якоря 5, в которой расположен его хвостовик 7, а его горизонтальная ось параллельна оси корпуса 12. Уклономер (акселерометр) 28 дает на выходе напряжение, пропорциональное ускорению свободного падения g и косинусу угла θ (фиг.1) наклона его горизонтальной оси и оси корпуса 12 к горизонтали. Поскольку величина g является постоянной, выходное напряжение уклономера 28 пропорционально косинусу угла θ. Выходные сигналы уклономера 28 и пенетрометра 17 попадают в регистратор 29 данных и находятся в нем до поступления каждого асинхронного импульса от выключателя 27, определяющего позицию соответствующей точки.
Многожильный трос 6 включает электрические провода 53 (фиг.2) для возможности приема и записи сигналов оборудованием судна 10, по мере их записи в регистраторе 29. Это позволяет управлять упомянутыми сигналами при определении траектории 2, где регистратор 29 действует как предохранительное устройство, предотвращающее потери данных при возможном разрыве сигнальной цепи между корпусом 12 и оборудованием на судне 10. На якоре 5 закреплен электрический соединительный провод 52, где с одной стороны он соединен через электрический соединитель 54 с проводами 53 в тросе 6, а с другой стороны провод 52 проходит по хвостовику 7, лапе 8 и проушине 14, подсоединяясь к регистратору 29 в корпусе 12.
На фиг. 7 показан альтернативный цилиндрический хвостовой узел 31, крепящийся вместо хвостового узла 21 (фиг. 5) к корпусу 12. Устройство, показанное на фиг. 7, работает несколько иначе, чем устройство, показанное на фиг. 5, что будет пояснено ниже. Вал 32, установленный в передней стенке 33 хвостового узла 31 в подшипнике скольжения 34 и уплотнении 35, выступает в полость 22. Диск 36, установленный на одном конце вала 32 в полости 22, несет магнит 37, который приводит в действие работающий на эффекте Холла выключатель 27, как описывалось выше. На другом конце вала 32 во внутренней полости 39 хвостового узла 31, заполненной смазкой, установлено коническое зубчатое колесо 38. Соосно со шкивом 41 зафиксировано коническое зубчатое колесо 40, находящееся в зацеплении с колесом 38. Свободный конец полости 39 закрыт поршнем 42, который может скользить вдоль оси в цилиндрическом хвостовом узле 31, будучи уплотнен относительно последнего скользящими уплотнениями 43. Полость 39 содержит полую цилиндрическую катушку 44 с намотанной на нее витой нитью 45 (далее шнур илл шпагат), которая выходит из полого внутреннего пространства 46 катушки 44 и оборачивается дважды вокруг шкива 41 перед выходом из полости 39 через отверстие 47 в поршне 42 к точке 48 крепления на съемном торцевом колпачке 49, который одевается надавливанием на свободный конец хвостового узла 31. Колпачок 49 предусмотрен с фланцем 50, диаметр которого больше наружного диаметра узла 31, вследствие чего грунт, давящий на этот фланец, стягивает колпачок 49 с узла 31. Диаметр шкива 41 выбран таким образом, чтобы на каждый метр шпагата 45, проходящего по шкиву 41, диск 36 совершал два оборота. Таким образом, диск 36 поворачивается дважды за каждый метр перемещения корпуса 12 вдоль траектории 2, как в случае диска 25 хвостового узла 21 по фиг. 5. К торцевому колпачку 49 может быть прикреплен акустический импульсный повторитель 51, а шпагат 45 заменен тонким многожильным электрическим проводом, одним концом соединенным с регистратором 29 данных, а другим концом - с повторителем 51.
При работе (фиг. 1) якорь 5 вместе с прикрепленным к нему устройством 4 для измерения траектории ложится на глубину H на поверхность 9 морского дна, представляющего собой часто встречающийся, обычно уплотненный, глинистый грунт с градиентом сопротивления сдвигу 1,6 кПа/м (см. выше), и при его горизонтальной тяге судном 10 через многожильный трос 6 начинает перемещаться вперед и одновременно своей лапой 8 внедряться через поверхность 9 морского дна в грунт. Давление грунта на лапу 8 якоря, сопротивление хвостовика 7 якоря и троса 6 сдерживают перемещение лапы 8 по криволинейной траектории 2, по которой следует точка P на лапе 8. Вначале траектория 2 имеет уклон к горизонтали около 50o, который постепенно уменьшается, пока траектория 2 не станет горизонтальной на глубине D ниже поверхности 9 дна, составляющей приблизительно 9-18L (L - длина лапы 8 якоря), при этом лапа 8 перемещается на этой глубине по горизонтали на расстояние приблизительно 50L. При внедрении якоря, вследствие воздействия грунта, корпус 12 устройства 4 поддерживается выравненным вдоль оси с траекторией 2 внедрения, так как грунт вызывает поворот этого корпуса вокруг точки P на лапе 8, так что измерение наклона корпуса 12 уклономером 28 является также измерением местного уклона траектории 2.
По мере перемещения корпуса 12 (фиг. 2-6) через грунт 3, вследствие столкновения грунта с лопатками 19 турбинного ротора 18 последний вращается, вращая, в свою очередь, вал 20 и диск 25. При вращении магнита 26 на диске 25, при прохождении им работающего на эффекте Холла выключателя 27 вырабатывается электрический импульс, который пускает регистратор 29 (самописец), в который поступают и запоминаются электрические сигналы с выходов пенетрометра 17 и уклономера 28. Шаг лопаток 19 выбран так, чтобы на каждый метр перемещения корпуса 12 вдоль траектории 2 турбинный ротор 18 совершал два оборота. Таким образом, такие параметры траектории 2 длиной приблизительно 300 м, как сопротивление вдавливанию (проникновению), и уклон измерялись и записывались в 600 точках, расположенных по траектории 2 через полметра. Эти замеры принимались также и записывались на оборудовании судна 10 через электрические провода 53, содержащиеся в многожильном тросе 6. Горизонтальная составляющая δx и вертикальная составляющая δy приращения δs расстояния между любыми двумя обозначаемыми импульсами точками P1 и P2 на траектории 2 определялись затем умножением δs (в этом случае оно выбрано 0,5 метра) на косинус и синус соответственно угла наклона корпуса 12 к горизонтали в этих точках (фиг.1). Таким образом, δx = δs•cosθ, а δy = δs•cosθ = 0,5•sinθ (фиг. 1). Это позволяет определять суммированием на компьютере как P(Σδx, Σδy) и воспроизводить на мониторе графически координаты любой точки P(x,у) в ряду точек, расположенных через промежутки ds на траектории 2. Величины сопротивления грунта сдвигу рассчитываются для каждой обозначаемой импульсом точки, где импульс отбирается на выходе пенетрометра 17 и графически воспроизводится на мониторе вместе с изображением кривой линии траектории 2.
При работе торцевой колпачок 49 стягивается с хвостового узла 31 фиг. 7 при столкновении грунта с фланцем 50 этого колпачка по мере продвижения корпуса 12 через поверхность 9 дна и вдоль траектории 2. Колпачок 49 выполнен слишком большим, чтобы втягиваться в грунт 3 закрепленным на нем шпагатом 45, и поэтому он остается на поверхности 9 грунта 3 (фиг. 1) и, таким образом, побуждает закрепленный на нем шпагат 45 вытягиваться через отверстие 47 в поршне 42 и располагаться в траектории 2. Выходящий шпагат 45 обжимает и поворачивает шкив 41, который через конические зубчатые колеса 38, 40 и вал 32, поворачивает диск 36 вместе с магнитом 37, проходящим мимо выключателя 27, с целью выдачи пусковых (триггерных) импульсов, о чем говорилось выше. Между тем, поршень 42 перемещается в полость 39 против наружного давления грунта, увеличивая давление смазки в этой полости, по мере вытягивания шпагата 45. Таким образом, через поршень 42 поддерживается нулевой перепад давления, который предотвращает попадание грунта 3 в полость 39 через отверстие 47. Если шпагат 45 заменяется тонким гибким многожильным электрическим проводом, данные, записанные в регистраторе 29, могут передаваться в акустический импульсный повторитель 51, прикрепленный к торцевому колпачку 49 у поверхности 9 дна и далее в акустический приемник на судне 10 (фиг. 1) через электрический провод, содержащийся в тросе 6, как альтернативный вариант (фиг.1).
Таким образом, цели настоящего изобретения реализуются с помощью якоря 5, внедряющегося на глубину D, составляющую 9-18L (где L - длина лапы 8 якоря 5), в обычный уплотненный глинистый грунт с градиентом сопротивления сдвигу 1,6 кПа/м (0,011 кгс/см2/м) при относительно небольшом горизонтальном тяговом усилии, путем оценки траектории 2 снятием ее характеристик и путем определения параметров грунтов вдоль этой траектории. Другая цель изобретения реализуется путем записи формы участков траектории и наблюдения того, что резкие изменения в уклоне траектории означают отклонения от однородности грунта, такие как нарушения сплошности слоев и наличие препятствий. Внедряемость якоря в грунт может затем оцениваться, исходя из числа и строгости отклонений от плавности кривизны измеряемой траектории. Таким образом, описанные здесь устройство и способ могут быть применены для оценки пригодности отдельных мест в заякоренном дне для использования якорей, обладающих высоким сопротивлением горизонтальному перемещению, без необходимости дорогостоящего бурения скважин.
Возможны, конечно, модификации. В частности, могут быть другими измерительные средства для определения горизонтальных и вертикальных смещений движущейся точки на траектории так же, как и средства для определения уклона траектории в точке на траектории. Кроме того, могут отличаться от описанных выше и средства для измерения сопротивления грунта вдавливанию. Например, скошенный диск или его часть, расположенные параллельно плоскости симметрии якоря, могут заменить симметричный вдоль оси конус известного промышленного пенетрометра. Указанный диск может позволить проводить измерения сопротивления вдавливанию под различными углами к грунту без необходимости поворачивания пенетрометра для его осевого выравнивания с траекторией. Кроме того, в устройство для получения соответствующих данных для точек на измеряемой траектории могут быть включены средства для измерения поверхностного трения и давлений в скважине. Кроме того, в качестве альтернативы устройству измерения перемещения, содержащему турбинное колесо 19 или шпагат 24 (с взаимодействующим оборудованием), может быть использован акселерометр, благодаря чему путем использования интеграционного процесса может быть снова измерено смещение точки на якоре 5, движущимся по траектории 2, и определено положение указанной движущейся точки в грунте с целью получения следа указанной траектории в грунте.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ ЯКОРЬ ДЛЯ ВОЛОЧИЛЬНОГО ВНЕДРЕНИЯ (ВАРИАНТЫ) | 1992 |
|
RU2148520C1 |
| ЯКОРЬ ДЛЯ МОРСКИХ СУДОВ | 1992 |
|
RU2111886C1 |
| Устройство для обследования гидротехнических сооружений | 2021 |
|
RU2769439C1 |
| УЛУЧШЕННЫЙ ПРИБРЕЖНЫЙ МОРСКОЙ ЯКОРЬ | 2012 |
|
RU2607895C2 |
| ЯКОРНАЯ СИСТЕМА С ТОЧНЫМ ПОЗИЦИОНИРОВАНИЕМ И СПОСОБ УСТАНОВКИ ЯКОРЕЙ В ЗАДАННЫХ ТОЧКАХ (ВАРИАНТЫ) | 1998 |
|
RU2232228C2 |
| БУРОВОЕ УСТРОЙСТВО ДЛЯ ПРОХОДКИ ШАХТНЫХ СТВОЛОВ И СПОСОБ ПРОХОДКИ ШАХТНОГО СТВОЛА | 2004 |
|
RU2358107C2 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ГЕОРАЗВЕДКИ | 2010 |
|
RU2436132C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |





Изобретение относится к устройству для проведения измерений параметров, характеризующих траекторию внедрения якоря в грунт морского дна, и дополнительно измерения такого параметра грунтов, как сопротивление грунта вдавливанию. Устройство следит за внедряемостью якоря в отдельном месте дна, осуществляя запись хода внедрения, а также указывает характер грунта в пласте указанного места внедрения. Устройство, в частности, осуществляет измерения через точку на якоре по мере перемещения якоря по траектории внедрения в грунт. Устройство включает средства, расположенные в корпусе, который несет якорь, служащие для измерения расстояния между двумя точками, лежащими на траектории, и исходя из этого, измерения с помощью дополнительных средств положения точки в грунте в отдельный момент, чем обеспечивается возможность графического воспроизведения следа траектории на дисплее. Указанные дополнительные средства могут содержать, например, уклономер, показывающий угол наклона корпуса в отдельный момент. Корпус может далее включать пенетрометр для измерения сопротивления грунта вдавливанию. Достигается возможность оценки пригодных мест в заякоренном дне для использования якорей, обладающих высоким сопротивлением горизонтальному перемещению. 3 с. и 20 з.п.ф-лы, 7 ил.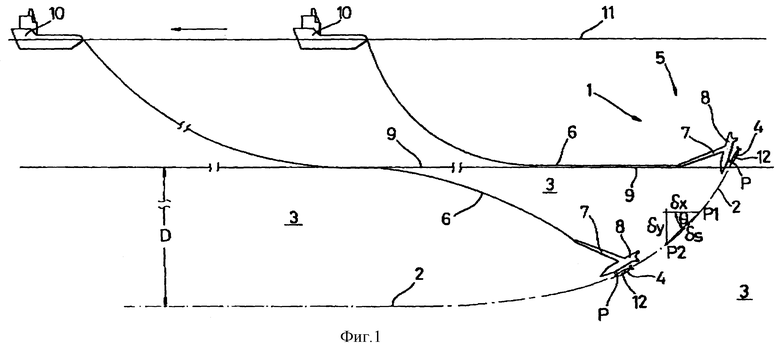
| US 3685479 A, 22.08.1972 | |||
| US 4651139 A, 17.03.1987. |
