Данное изобретение относится к области измерительной техники, а именно к преобразователям инерциальной информации, таким как акселерометр или гироскопический измеритель угловой скорости.
Существуют способы измерения механических величин [1] посредством преобразовательной инерциальной информации, заключающиеся в том, что преобразуют механическую величину в электрический сигнал, являющийся мерой механической величины, причем при градуировке преобразователя инерциальной информации задают калиброванные входные механические воздействия и измеряют электрические сигналы преобразователя инерциальной информации.
Наиболее близким по технической сущности является способ измерения механических величин [2] посредством преобразователей инерциальной информации, таких как акселерометр или гироскопический измеритель угловой скорости, состоящий в том, что преобразуют механическую величину в электрический сигнал, являющийся мерой механической величины, причем при градуировке преобразователя инерциальной информации задают калиброванные входные механические воздействия, измеряют электрические сигналы преобразователя инерциальной информации, частотные сигналы направляют в двоичный счетчик и далее в регистр, преобразуя их в цифровые сигналы, в перепрограммируемое постоянное запоминающее устройство вычислительного устройства записывают математическую модель статической градуировочной характеристики преобразователя инерциальной информации, с выхода процессора вычислительного устройства во внешнюю цепь направляют код откорректированного сигнала преобразователя инерциальной информации, являющийся выходным сигналом преобразователя инерциальной информации.
Недостатком такого способа измерения механических величин является погрешность измерения механических величин вследствие нелинейности реальной статической градуированной характеристики преобразователя инерциальной информации.
Техническим результатом изобретения является повышение точности измерения механических величин.
Данный технический результат достигается способом измерения механических величин посредством преобразователей инерциальной информации, таких как акселерометр или гироскопический измеритель угловой скорости, состоящий в том, что преобразуют механическую величину в электрический сигнал, являющийся мерой механической величины, причем при градуировке преобразователя инерциальной информации задают калиброванные входные механические воздействия, измеряют электрические сигналы преобразователя инерциальной информации, частотные сигналы направляют в двоичный счетчик и далее в регистр, преобразуя их в цифровые сигналы, в перепрограммируемое постоянное запоминающее устройство вычислительного устройства записывают математическую модель статической градуировочной характеристики преобразователя инерциальной информации, с выхода процессора вычислительного устройства во внешнюю цепь направляют код откорректированного сигнала преобразователя инерциальной информации, являющийся выходным сигналом преобразователя инерциальной информации, тем, что в качестве преобразователя инерциальной информации используют компенсационный преобразователь механической величины в аналоговый электрический выходной сигнал, который направляют в преобразователь "напряжение - частота", преобразуя его в частотный сигнал, предварительно в перепрограммируемое постоянное запоминающее устройство записывают математические модели теоретической статической градуировочной характеристики преобразователя инерциальной информации и заданной функции преобразования преобразователя инерциальной информации, по направляемым с выхода регистра в процессор вычислительного устройства полученным в процессе градуировки представленным в цифровом виде значениям реальной статической градуировочной характеристики преобразователя инерциальной информации на основании записанной в перепрограммируемом постоянном запоминающем устройстве математической модели теоретической статической градуировочной характеристики преобразователя инерциальной информации в процессоре методом аппроксимации по методу наименьших квадратов определяют коэффициенты математической модели аппроксимированной реальной статической градуировочной характеристики, по которым в перепрограммируемое постоянное запоминающее устройство записывают математическую модель аппроксимированной реальной статической градуировочной характеристики, в процессе измерений, когда преобразователь инерциальной информации измеряет инерциальную информацию на объекте, в процессоре поступающие из регистра сигналы идентифицируют с рассчитанными по математической модели значениями аппроксимированной реальной статической градуировочной характеристики преобразователя инерциальной информации, при значении аргумента аппроксимированной реальной статической градуировочной характеристики, когда сигнал из регистра совпадает с значением аппроксимированной реальной статической градуировочной характеристики, из процессора во внешнюю цепь направляют код значения заданной функции преобразования преобразователя инерциальной информации, рассчитанного в процессоре по поступившей из перепрограммируемого постоянного запоминающего устройства математической модели заданной функции преобразования при значении ее аргумента, равном вышеуказанному значению аргумента аппроксимированной реальной статической градуировочной характеристики преобразователя инерциальной информации.
Путем выполнения компенсационного преобразования механической величины в аналоговый электрический сигнал, преобразования его в частотный сигнал, предварительной записи в перепрограммируемое постоянное запоминающее устройство математических моделей теоретической статической градуировочной характеристики и заданной функции преобразования преобразователя инерциальной информации, определения коэффициентов математической модели аппроксимированной реальной статической градуировочной характеристики, записи в перепрограммируемое постоянное запоминающее устройство математической модели аппроксимированной реальной статической градуировочной характеристики, проведения идентификации поступающих из регистра сигналов с значениями аппроксимированной реальной статической градуировочной характеристики и определения таким образом аргумента аппроксимированной реальной статической градуировочной характеристики, подачи во внешнюю цепь из процессора кода значения заданной функции преобразования преобразователя инерциальной информации, полученного вычислением по величине вышеуказанного аргумента, обеспечивается получение выходного сигнала преобразователя инерциальной информации точно в соответствии с заданной функцией преобразования преобразователя инерциальной информации, устраняя погрешности от нелинейности и разброса коэффициентов преобразования преобразователя инерциальной информации от образца к образцу. Тем самым повышается точность измерения механической величины посредством преобразователя инерциальной информации.
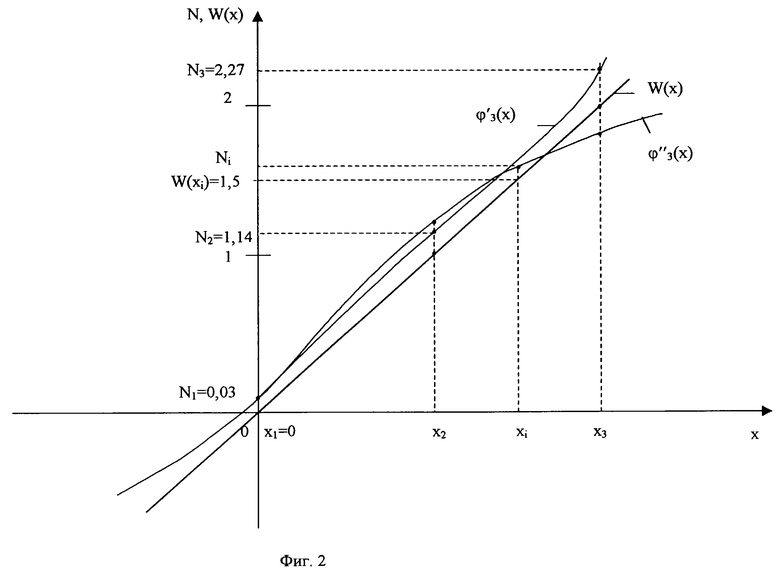
На фиг. 1 представлена блок-схема преобразования механической величины посредством способа измерения механической величины, на фиг.2 - графики статических градуировочных характеристик преобразователя инерциальной информации.
В преобразователе инерциальной информации с компенсационным преобразованием (фиг.1) чувствительный элемент 1 с инерционным элементом 2 соединен с преобразователем положения 3, к выходу которого подключен усилитель 4, имеющий предварительный усилитель, демодулятор и усилитель постоянного тока, к которому подключена компенсационная катушка магнитоэлектрического обратного преобразователя 5. К выходу усилителя 4 также подключен преобразователь "напряжение-частота" 6, выход которого соединен с входом двоичного счетчика 7. Выход двоичного счетчика 7 соединен с информационным входом регистра 8.
В состав вычислительного устройства входят процессор 9, перепрограммируемое постоянное запоминающее устройство (ППЗУ) 10, постоянное запоминающее устройство (ПЗУ) 11, дешифратор 12, таймер 13. Процессор 9, ПЗУ 11, ППЗУ 10 и выход регистра 8 соединены шиной данных. Процессор 9, ПЗУ 11, ППЗУ 10 соединены шиной адреса. По шине управления процессор 9 соединен с входом управления дешифратора 12. Вход включения выхода регистра 8 соединен с одним из выходов дешифратора 12. Другой выход дешифратора 12 соединен с входом выбора кристалла (CS) ППЗУ 10. Выход тактовой частоты процессора 9 соединен с входом таймера 13, выход которого соединен с входом сброса двоичного счетчика 7, с входом записи регистра 8, с входом запроса прерывания процессора 9.
В акселерометре чувствительным элементом 1 является его подвижный элемент, масса которого представляет его инерционный элемент 2. В гироскопическом измерителе угловой скорости чувствительным элементом 1 является ротор гироскопа, кинетический момент которого представляет его инерционный элемент 2.
Способ измерения механических величин осуществляется следующим образом. Действующая на вход преобразователя инерциальной информации (фиг.1) механическая величина Х воспринимается инерционным элементом 2 и преобразуется в инерционную силу Fи (в акселерометре) или момент Ми (в гироскопическом измерителе угловой скорости), которые вызывают перемещение чувствительного элемента 1, воспринимаемое преобразователем положения 3. С выхода преобразователя положения 3 электрический сигнал подается на вход усилителя 4, с выхода усилителя постоянного тока которого постоянное напряжение U подается в компенсационную катушку магнитоэлектрического обратного преобразователя 5, где создается компенсационный момент Мк или компенсационная сила Fк. В результате механическая величина преобразуется в аналоговый сигнал-напряжение U
U = ϕ1(x) (1)
В преобразователе "напряжение-частота" 6 постоянное напряжение U приводится к частотному виду
f = ϕ(U) = ϕ2(x) (2)
где f - частота.
При преобразовании без внесения погрешности в преобразователе "напряжение-частота" 6
ϕ1(x) = ϕ2(x) (3)
После обсчета в двоичном счетчике 7 за тактовое время частотного сигнала и записи результата счета в регистре 8 на выходе регистра 8 образуется код
N = ξ(f) = ϕ3(x) (4)
В идеальном случае
ϕ3(x) = ϕ2(x) (5)
В общем виде, записанная в ППЗУ 10 математическая модель теоретической статической градуировочной характеристики преобразователя инерциальной информации описывается как
где К - коэффициент преобразования преобразователя инерциальной информации;
a0, a1,... an - коэффициенты математической модели.
В процессе градуировки с помощью высокоточного оборудования, например прецизионной центрифуги для акселерометра, на вход преобразователя инерциальной информации задают калиброванные значения x1, x2...xi...xn+1 механической величины (в случае акселерометра - линейные ускорения).
Полученные в результате градуировки коды N1, N2...Ni...Nn+1 представляют дискретные значения реальной статической градуировочной характеристики  преобразователя инерциальной информации:
преобразователя инерциальной информации:
Для определения методом наименьших квадратов коэффициентов математической модели аппроксимированной реальной статической градуировочной характеристики принимают за варьируемый параметр один из коэффициентов ai, определяемый из условия минимума интеграла от квадрата разности математических моделей теоретической и статической градуировочных характеристик
Это равносильно условию
Определение коэффициентов математической модели аппроксимированной реальной статической градуировочной характеристики производится из решения системы уравнений
В частном случае, например, если математическая модель теоретической статической градуировочной характеристики имеет вид
система уравнений (10) такова
Тогда интегральная функция имеет вид
где I1, I2, I3 - слагаемые интегральной функции.
Так как слагаемая интегральной функции 1з не является функцией ai, то производная от интегральной функции по любому коэффициенту ai будет иметь вид
где
Интеграл I1:
Так как в процессе градуировки преобразователя инерциальной информации реальная статическая градуировочная характеристика задается по дискретным значениям сигнала преобразователя инерциальной информации, то выражение для интеграла I2 необходимо искать как сумму кусочно-интегрированных функций.
Пусть, например, для акселерометра в процессе градуировки задают значения ускорения x1=0; x2=l; х3=2 в единицах ускорения свободного падения g. Тогда при коэффициенте преобразования акселерометра К=1 B/g коды показаний акселерометра
На выбранном интервале Δxi = 1 реальная статическая градуировочная характеристика может быть аппроксимирована как постоянная величина со значением
Тогда интеграл I2 может быть записан в виде:
Тогда согласно системе уравнений (12) и значений кодов (17)
В соответствии с выражением (16)
В выражении (19) интегральный член
При подстановке в (19) выражения (21) получается
При подстановке в (22) значений (17) получается
I2=0,1374+5,7a1+8,34667 a2 (23)
Тогда на основании формулы (13)
Q= I1-I2+I3= -0,1356-5,58a1-8,18667a2+2,66667a1 2+8a1а2+6,4a2 2+(I3= const) (24)
В соответствии с формулами (14) и (24) система уравнений (12) принимает вид
Решение системы уравнений (25) дает
a1=1,38986
a2=-0,22916 (26)
Математическая модель аппроксимированной реальной статической градуировочной характеристики имеет вид
Полученные в процессе градуировки преобразователя инерциальной информации коэффициенты математической модели (в рассматриваемом случае коэффициенты a0, a1, a2) записывают в ППЗУ 10, задавая тем самым выражение математической модели аппроксимированной реальной статической градуировочной характеристики в соответствии с выражением (27).
В ППЗУ 10 также записывают заданную функцию преобразования W(x) преобразователя инерциальной информации, например, в виде
W(x)=Kx (28)
В процессе измерения механической величины на объекте, например корабле, с выхода регистра 8 получают код Ni поступившей на вход преобразователя инерциальной информации механической величины хi
При подстановке значения Ni в выражение (27) математической модели аппроксимированной реальной статической градуировочной характеристики и решая уравнение
1,59933=K(0,03+1,38996xi-0,22916xi 2), (30)
Получается значение аргумента хi
xi=1,5 (31)
После подстановки в выражение (28) заданной функции преобразования преобразователя инерциальной информации значения аргумента хi определяется значение
W(xi)=Kxi=1,5 (32)
Значение W(xi), являющееся выходным сигналом преобразователя инерциальной информации, поступает с выхода процессора 9 во внешнюю цепь.
Передача дискретных значений реальной статической градуировочной характеристики после преобразования в преобразователе "напряжение-частота" 6 производится в процессор 9 по сигналам с выхода таймера 13 на вход запроса прерывания процессора 9, вход записи регистра 8, вход сброса двоичного счетчика 7. При этом по сигналам с таймера 13 информация с двоичного счетчика 7 переписывается в регистр 8, а затем двоичный счетчик 7 обнуляется.
Процессор 9, получив запрос прерывания, по программе, записанной в ПЗУ 11, считывает коды N1, N2...Nn+1 с выхода регистра 8, подавая сигнал с выхода дешифратора 12 на вход включения выхода регистра 8, производит математические операции в соответствии со способом измерения механических величин.
При градуировке преобразователя инерциальной информации по кодам N1, N2. . . Nn+1 значений реальной статической градуировочной характеристики в соответствии с записанной в ППЗУ 10 математической моделью (6) теоретической статической градуировочной характеристики в процессоре 9 вычисляются коэффициенты a0, a1...an математической модели аппроксимированной реальной статической градуировочной характеристики по алгоритму (10).
В процессоре 9 при измерении механической величины на объекте вычисляют аргумент хi аппроксимированной реальной статической градуировочной характеристики и по алгоритму (32) вычисляют значение выходного сигнала преобразователя инерциальной информации W(xi).
В гироскопическом измерителе угловой скорости входным воздействием является угловая скорость, задаваемая посредством прецизионных поворотных столов.
Способ измерения угловой скорости осуществляется аналогично способу измерения линейного ускорения посредством акселерометра.
При таком способе измерения механических величин выходной сигнал преобразователя инерциальной информации является унифицированным, то есть не зависящим от разброса коэффициентов преобразования различных образцов преобразователя инерциальной информации одной модели.
Источники информации
1. С.С.Щедровицкий. Методы и аппаратура для градуировки и поверки акселерометров. "Измерительная техника", 6, 1958, стр.87-93.
2. Патент РФ 2148829, кл. G 01 P 15/125. Измеритель линейного ускорения. 20.01.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 1999 |
|
RU2148829C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И ПОВОРОТНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184979C1 |
| ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 1995 |
|
RU2087866C1 |
| КАНАЛ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2548053C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2188393C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ МАГНИТОМЕТРА | 2008 |
|
RU2386141C1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2194948C1 |
Использование: в измерительной технике, а именно в преобразователях инерциальной информации, таких как акселерометр или гироскопический измеритель угловой скорости. Сущность: преобразуют механическую величину в электрический сигнал, задавая при градуировке калиброванные входные механические воздействия и преобразуя аналоговый сигнал в цифровой код. При использовании компенсационных преобразователей аналоговый сигнал преобразуют в частотный. В перепрограммируемое постоянное запоминающее устройство записывают математическую модель статических градуировочных характеристик и заданной функции преобразования. Определяют коэффициенты математической модели. При работе на объекте идентифицируют значения реальной статической градуировочной характеристики со значениями аппроксимированной реальной статической градуировочной характеристики. В результате идентификации из преобразователя инерциальной информации выдают конкретное значение заданной функции преобразования преобразователя инерциальной информации. Технический результат: повышение точности измерения механических величин. 2 ил.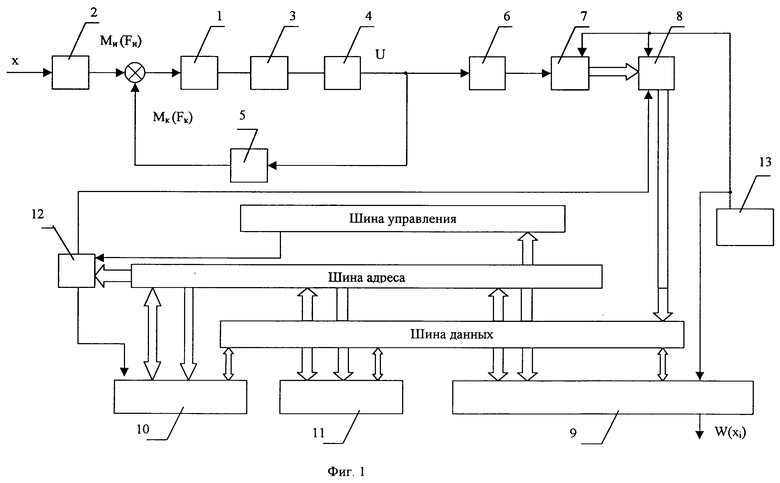
Способ измерения механических величин посредством преобразователей инерциальной информации, таких, как акселерометр или гироскопический измеритель угловой скорости, состоящий в том, что преобразуют механическую величину в электрический сигнал, являющийся мерой механической величины, причем при градуировке преобразователя инерциальной информации задают калиброванные входные механические воздействия, измеряют электрические сигналы преобразователя инерциальной информации, частотные сигналы направляют в двоичный счетчик и далее в регистр, преобразуя их в цифровые сигналы, в перепрограммируемое постоянное запоминающее устройство вычислительного устройства записывают математическую модель статической градуировочной характеристики преобразователя инерциальной информации, с выхода процессора вычислительного устройства во внешнюю цепь направляют код откорректированного сигнала преобразователя инерциальной информации, являющийся выходным сигналом преобразователя инерциальной информации, отличающийся тем, что в качестве преобразователя инерциальной информации используют компенсационный преобразователь механической величины в аналоговый электрический выходной сигнал, который направляют в преобразователь "напряжение-частота", преобразуя его в частотный сигнал, предварительно в перепрограммируемое постоянное запоминающее устройство записывают математические модели теоретической статической градуировочной характеристики преобразователя инерциальной информации и заданной функции преобразования преобразователя инерциальной информации, по направляемым с выхода регистра в процессор вычислительного устройства полученным в процессе градуировки представленным в цифровом виде значениям реальной статической градуировочной характеристики преобразователя инерциальной информации на основании записанной в перепрограммируемом постоянном запоминающем устройстве математической модели теоретической статической градуировочной характеристики преобразователя инерциальной информации в процессоре методом аппроксимации по методу наименьших квадратов определяют коэффициенты математической модели аппроксимированной реальной статической градуировочной характеристики, по которым в перепрограммируемое постоянное запоминающее устройство записывают математическую модель аппроксимированной реальной статической градуировочной характеристики, в процессе измерений, когда преобразователь инерциальной информации измеряет инерциальную информацию на объекте, в процессоре поступающие из регистра сигналы идентифицируют с рассчитанными по математической модели значениями аппроксимированной реальной статической градуировочной характеристики преобразователя инерциальной информации, при значении аргумента аппроксимированной реальной статической градуировочной характеристики, когда сигнал из регистра совпадает с значением аппроксимированной реальной статической градуировочной характеристики, из процессора во внешнюю цепь направляют код значения заданной функции преобразования преобразователя инерциальной информации, рассчитанного в процессоре по поступившей из перепрограммируемого постоянного запоминающего устройства математической модели заданной функции преобразования при значении ее аргумента, равном вышеуказанному значению аргумента аппроксимированной реальной статической градуировочной характеристики преобразователя инерциальной информации.
| ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 1999 |
|
RU2148829C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| US 5619323 A, 08.04.1997 | |||
| DE 4029215 A1, 23.04.1992 | |||
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
