Изобретение относится к авиационной технике и предназначено для удержания груза на внешней подвеске вертолета в заданном положении по азимуту при выполнении транспортных операций и строительно-монтажных работ.
Известна система внешней подвески груза к вертолету, содержащая грузонесущий элемент, вертикальный стержень которого соединен с вертолетом посредством карданного узла без возможности поворота вокруг своей оси, а горизонтальный стержень которого размещен под фюзеляжем, систему из четырех строп, одними концами попарно прикрепленных к краям горизонтального стержня и противоположными концами попарно, с образованием других пар, присоединенных к грузозахватным устройствам (авт. свид. СССР N 973411, кл. B 64 D 9/00, 1980). Эта система внешней подвески в некоторых случаях может обеспечить более стабильное положение груза в полете по сравнению с распространенной двухстроповой (бифилярной) внешней подвеской. Однако известная система не обеспечивает повороты груза по азимуту, что необходимо, например, при выполнении строительно-монтажных работ.
Известна система внешней подвески груза к вертолету, наиболее близкая по технической сущности к заявляемой и которая может служить прототипом. Эта система содержит грузонесущий элемент, вертикальный стержень которого посредством карданного узла соединен с вертолетом с возможностью поворота вокруг своей оси и снабжен механизмом поворота с приводом, а горизонтальный стержень которого размещен под фюзеляжем, систему из четырех строп, одними концами попарно присоединенных к краям горизонтального стержня и противоположными концами присоединенных к грузозахватным устройствам (патент РФ N 2088482, кл. B 64 D 9/00, 1997). Эта система обеспечивает возможность управляемого поворота груза по азимуту, что позволяет приводить груз в необходимое положение при его транспортировании на внешней подвеске (например, в положение с наименьшим аэродинамическим сопротивлением) или при выполнении строительно-монтажных работ. Однако известная система имеет недостатки, вызванные возможностью неравномерной нагрузки на стропы в полете, что приводит к повышенной материалоемкости строповой системы.
Еще одним недостатком известной системы внешней подвески является повышенная материалоемкость грузонесущего элемента вследствие жесткого соединения вертикального и горизонтального стержней. Кроме того, размещение цельного (неразъемного) грузонесущего элемента увеличенного сечения может быть затруднено на вертолетах с малым клиренсом на стоянке.
Задачей настоящего изобретения является достижение технического результата, заключающегося в снижении материалоемкости системы внешней подвески с обеспечением способности стабилизировать груз как при транспортировании, так и в процессе его монтажа, а также с обеспечением возможности применения на вертолетах с малым клиренсом.
Указанный технический результат в системе внешней подвески груза к вертолету, содержащей грузонесущий элемент, вертикальный стержень которого соединен с вертолетом при помощи карданного узла с возможностью поворота вокруг своей оси и снабжен механизмом поворота с приводом, а горизонтальный стержень которого размещен под фюзеляжем, систему из четырех строп, одними концами попарно прикрепленных к горизонтальному стержню, а противоположными концами присоединенных к грузозахватным устройствам, достигается за счет того, что система снабжена, по крайней мере, двумя балансирами, стропы одного края горизонтального стержня прикреплены к одному грузозахватному устройству, причем каждая пара строп прикреплена к грузозахватному устройству или к горизонтальному стержню посредством балансира, а между противоположными концами этих строп в каждой паре установлены распорки, при этом между стропами из разных пар закреплены траверсы.
Кроме того, горизонтальный стержень грузонесущего элемента присоединен к вертикальному стержню посредством двух гибких связей. Распорки в каждой паре строп установлены на расстоянии 0,2...0,8 длины строп от точки их соединения. Траверсы установлены параллельно горизонтальному стержню на расстоянии 0,2...0,8 длины строп от обеих точек их присоединения к балансирам. Траверсы могут быть выполнены регулируемыми по длине.
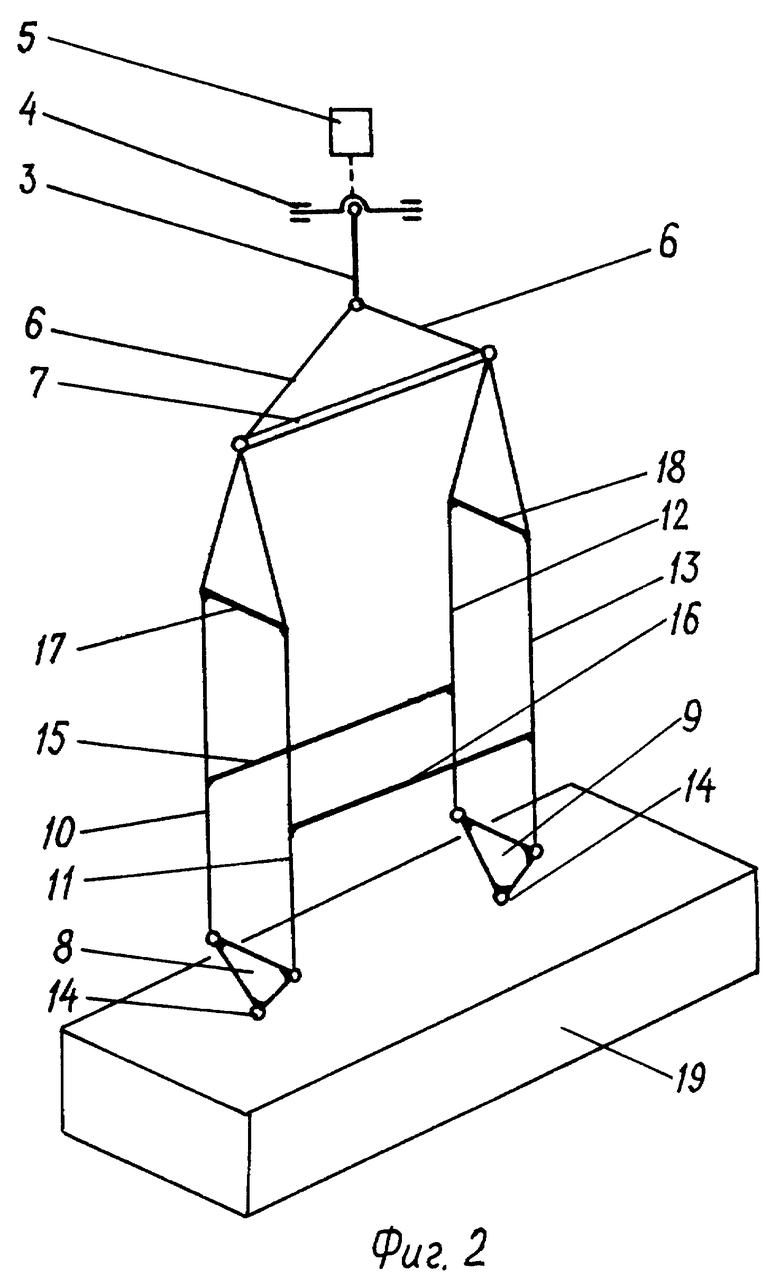
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен один из вариантов системы внешней подвески груза к вертолету, на фиг. 2 - другой вариант системы.
Система внешней подвески груза к вертолету 1 включает грузонесущий элемент 2, вертикальный стержень 3 которого соединен с вертолетом при помощи карданного узла 4, который обеспечивает возможность отклонения внешней подвески с грузом в полете в продольной и поперечной плоскостях вертолета под действием аэродинамических сил. Вертикальный стержень 3 имеет возможность управляемого поворота вокруг своей оси под действием механизма поворота с приводом 5. К вертикальному стержню 3 снизу (под фюзеляжем вертолета) посредством двух гибких связей 6 присоединен горизонтальный стержень 7. По краям горизонтального стержня установлены качающиеся балансиры 8 и 9 (см. фиг. 1). К балансиру 8 прикреплена своими верхними концами пара строп 10 и 11, а к балансиру 9 так же - пара строп 12 и 13. Нижние концы каждой пары строп соединены между собой и несут грузозахватные устройства 14 (электрозамки, крюки или др. ). Между стропами из разных пар, например между стропами 10 и 12, установлена траверса 15, а между стропами 11 и 13 - траверса 16. Обе траверсы установлены параллельно горизонтальному стержню 7 на расстоянии 0,2... 0,8 длины строп от точек их присоединения к балансирам. Обе траверсы 15 и 16 могут быть выполнены регулируемыми по длине, например телескопическими с фиксацией каждого нового положения. Начальная длина траверс может быть равна длине горизонтального стержня 7.
Дополнительно в каждой паре строп на расстоянии 0,2...0,8 длины строп от точек их соединения могут быть установлены распорки 17 и 18. Длина распорок может быть равна размаху балансиров 8 и 9.
Предлагаемая система внешней подвески груза к вертолету работает следующим образом.
При подготовке к подцепке груза 19 настраивают длину траверс 15 и 16 так, чтобы их длина была равна или больше базы строповки, т.е. расстояния между строповочными узлами на грузе. К последним присоединяют грузозахватные устройства 14. В частном случае, который изображен на фиг. 1, база строповки равна длине горизонтального стержня, и размер траверс 15 и 16 равен длине горизонтального стержня 7. Поэтому обе пары стропов 10-11 и 12-13 расположены в параллельных плоскостях. При крутильных колебаниях груза, вызванных маневрированием вертолета или включением механизма поворота, в этой системе возникают силы, направленные на восстановление нарушенной геометрии. Например, при повороте грузонесущего элемента 2 по часовой стрелке (если смотреть сверху), груз 19 может отставать по углу от горизонтального стержня 7. Это может вызвать увеличение нагрузки в передних (по ходу вращения) стропах 10, 13 и снижение нагрузки в задних стропах 11, 12. В свою очередь разница сил в стропах вызовет поворот вокруг своей оси балансиров 8 и 9 до выравнивания нагрузок в парах строп 10-11 и 12-13. За счет поворота во встречных направлениях обеих пар строп со своими балансирами расстояния между передним стропом 10 одной пары и задним стропом 12 другой пары, и точно также между стропами 11 и 13 должны измениться. Однако этому препятствуют траверсы 15 и 16, длина которых зафиксирована. Таким образом, геометрия системы будет оставаться неизменной, и груз будет отслеживать по углу положение горизонтального стержня 7, незначительно отставая от него в пределах упругих деформаций элементов системы. В случае резких маневров вертолета или при динамических нагрузках на систему во время монтажа груза прямоугольники, образованные элементами 8-10-17-11 и 9-12-18-13, могут принимать форму ромбов, расположенных в параллельных плоскостях и наклоненных в противоположных направлениях. В этом случае траверсы 15 и 16 сработают как и в первом случае и не допустят значительного изменения расстояния между парами строп. Если же произойдет изменение формы указанных прямоугольников в пределах упругих деформаций, то, поскольку высота ромба меньше высоты прямоугольника при равных периметрах, может уменьшиться расстояние между балансиром 8 и распоркой 17, а также между балансиром 9 и распоркой 18 на величину Δh. В результате груз 19 поднимется на ту же величину Δh. Запасенная при этом подъеме груза потенциальная энергия будет стремиться вернуть его в исходное положение, т.е. вниз, с возвращением первоначальной геометрии системы, чем будет обеспечена стабилизация груза.
С увеличением базы строповки, например, при подцепке более длинного груза 19 соответственно настраивают длину траверс 15 и 16 так, чтобы она была больше длины горизонтального стержня 7. В этом случае плоскости, в которых расположены пары строп 10-11 и 12-13, не параллельны, и "жесткость" системы возрастает с увеличением угла между ними, как в бифилярном подвесе с наклонными стропами.
Возможен другой вариант сборки предлагаемой системы внешней подвески груза к вертолету (см. фиг. 2), при котором, к краям горизонтального стержня 7 прикрепляют соединенные концы пар строп 10-11 и 12-13, а балансиры 8 и 9 устанавливают снизу, и к ним присоединяют грузозахватные устройства 14. Распорки 17 и 18 в этом случае устанавливают в каждой паре строп на указанном выше расстоянии от горизонтального стержня 7. Траверсы 15 и 16 устанавливают на указанном выше расстоянии от балансиров. Этот вариант также стабилизирует положение груза 19 по азимуту и обладает аналогичной "жесткостью". Он, как и первый вариант, исключает скручивание строп.
В обоих вариантах системы обеспечивается минимальная материалоемкость за счет возможности использования строп меньшего диаметра, чем в прототипе, поскольку все стропы в процессе работы нагружены одинаково. Кроме того, снижение материалоемкости обеспечено за счет соединения вертикального стержня 3 с горизонтальным стержнем 7 посредством гибких связей 6. Горизонтальный стержень 7 воспринимает только сжимающие усилия и разгружен от крутящего и изгибающего моментов, что позволяет выполнять его менее металлоемким при большей длине. Такое исполнение грузонесущего элемента 2 обеспечивает ему возможность складывания при посадке вертолета с малым клиренсом. В процессе летных испытаний предлагаемой системы внешней подвески груза на вертолете Ми-26 подтверждена ее высокая надежность, способность стабилизировать и удерживать грузы массой до 20 т в заданном положении как при транспортировании, так и при строительно-монтажных работах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1995 |
|
RU2088482C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗА ВЕРТОЛЕТАМИ | 1998 |
|
RU2149802C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 2001 |
|
RU2213028C2 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2174090C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ГРУЗА | 2005 |
|
RU2286306C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ГРУЗА | 1995 |
|
RU2087411C1 |
| Система внешней подвески груза к вертолету | 1980 |
|
SU973411A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2350511C1 |
| СПОСОБ ВЫСОТНОГО МОНТАЖА ГРУЗА С ПОМОЩЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2162503C1 |
| Система внешней подвески груза к вертолету | 1982 |
|
SU1045519A1 |
Изобретение относится к авиационной технике и предназначено для стабилизации груза на внешней подвеске вертолета. Система внешней подвески груза к вертолету содержит грузонесущий элемент, вертикальный стержень которого соединен с вертолетом при помощи карданного узла с возможностью поворота относительно своей оси под действием привода. К вертикальному стержню посредством двух гибких связей присоединен горизонтальный стержень, расположенный под фюзеляжем вертолета и к которому прикреплены две пары строп. Каждая пара строп прикреплена по краям горизонтального стержня посредством качающихся балансиров, что обеспечивает равномерное нагружение всех четырех строп. Нижние концы строп в каждой паре соединены друг с другом и несут грузозахватные устройства типа электрозамков, крюков и т.п. Между стропами в каждой паре на расстоянии 0,2 - 0,8 их длины от точки их соединения установлены распорки, исключающие скручивание строп в этой паре. Между стропами из разных пар на расстоянии 0,2 - 0,8 их длины от точек присоединения к балансирам установлены траверсы переменной длины, исключающие скручивание строп из разных пар. Предлагаемая система внешней подвески обеспечивает заданное положение груза по азимуту при маневрировании вертолета, при вращении груза механизмом поворота и при динамических нагрузках, действующих на груз в процессе монтажа. 4 з.п.ф-лы, 2 ил.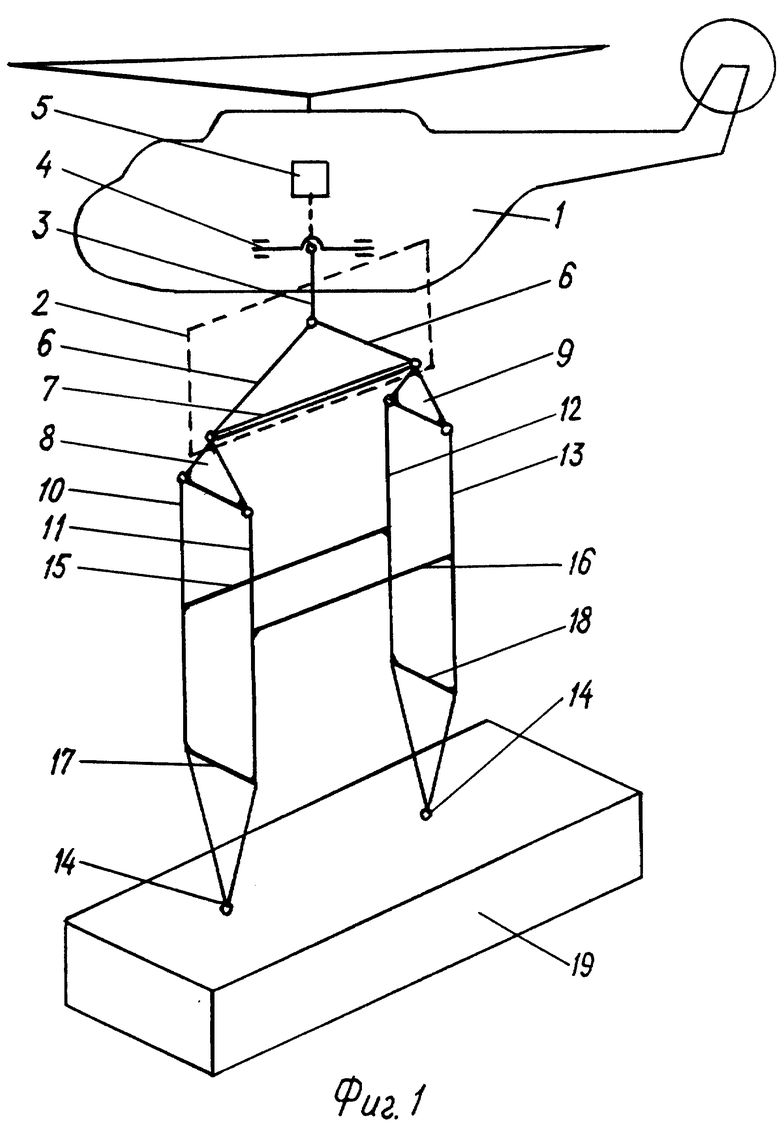
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1995 |
|
RU2088482C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ГРУЗА | 1995 |
|
RU2087411C1 |
| Система внешней подвески груза к вертолету | 1980 |
|
SU973411A1 |
| Система внешней подвески груза квертолету | 1973 |
|
SU509495A1 |
