(54) СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2763621C1 |
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА | 2021 |
|
RU2772134C1 |
| УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА ВЕРТОЛЁТА | 2022 |
|
RU2785246C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 2001 |
|
RU2189925C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2030330C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2030331C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1971 |
|
SU309873A1 |
| СПОСОБ МОНТАЖА ГРУЗА С ПОМОЩЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2136547C1 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2350511C1 |


1
Изобретение относится к авиационной технике, в частвости касается вертолетов кранрв.
Известна система внешней подвески I груза к вертолету, содержащая электропе™ |бедку с тросом и замком-рвушкой, грузо-
|ВОЙ трос с головкой и грузовым 1фЮКОМ5
силовой замок, автоматически зашграющий грузо-ой трос. В известном устройстве груз, подвешен ный на тросе к вертолету в одной точке, при наличии внешних факторов (порыв вет- ра, работа органами управления вертолета) может совершать колебания относительно точки подвеса, что затрудняет выполнить
монтажные работы. К тому же вывод вер толета над заданной точкой монтажных работ по командам с земли затруднен.
Цель изобретения - обеспечение надеж .ной стабилизации груза в заданной точке
; при монтажных работах.
I Это достигается тем, что головка тро lea вьтопнена из двух частей, связанных ; между собой сферическим подшига иком, I верхняя часть которой имеет бурт для креп
ления в силовом замке, а нижняя - цилиндрическое утолщение, которое взаимодействует со сферическим шарниром ппос го четьфехзвенного механизма, закреплен ного на корпусе силового замка с помощь карданов, причем штанга, закрепленная на одном из звеньев механизма, взаимодействует с рычагами автопилотного датчика положения троса.
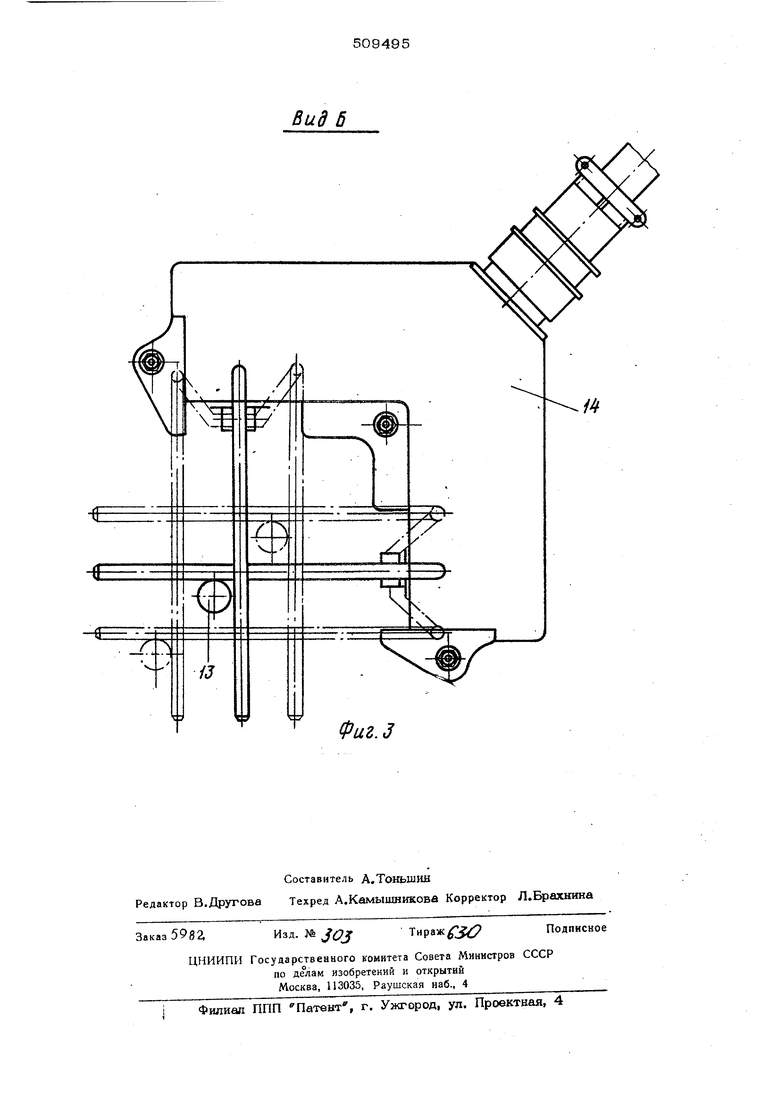
На фиг. 1 изображена схема системы внешней подвески груза к вертолету; на . 2 - вид по стрелке А на фиг. 1; на 1Ф1Ш. 3 - вид по стрелке Б на фиг, 2,
На борту вертолета 1 установлена электролебедка 2 трос которой с замком- рвушкой проходит через силовой замок 3, К замку-рвушке закреплен грузовой трос 4 с крюком 5 через головку, которая БЬ1полнена из верхней части 6 с буртом для закрепления в силовом замке в нижней части 7, связанных между собой сферическим подшипником 8. Нижняя часть го ловки грузового троса имеет цилшздри- ческое утолшение 9, которое взаимодействует со сферическим шарн1фом 10 плос- кого шарнирного четырех венного механиэма 11, закрепленного на корпусе силово го замка 3 с помощью карданов 12. На ОДНОМ из звеньев четьфехзвенного низма закреплена штанга 13, которая г взаимодействует с подпружиненными чагами автопилотного датчика положения троса 14, установленного на корпусе силового замка 3 и связанного электрическиЧ ми цепями с автопилотом. Устройство работает следующим образом. Вертолет 1 с грузом на крюке 5 грузового троса 4 зависает над заданным местом монтажных работ на необходимой J. высоте. Такелажники, корректируя по ложение груза, прикладывают боковую нагруаку к грузу и отклоняют грузовой трос на.„ угол ot . Грузовой трос, связанный с шарнирным четьфехзвенииком 11, отклоняет его на тот же угол tsi . Подпружиненный рычаг датчика по ложения троса 14, в свою очередь, отклоняется на угол J3 , однозначно зависящий от угла «х , Датчик 14 положения троса представляет собой единый .корпусов котором разме щены два взаимноперпендикулярных подпру жиненных рычага. Отклонения одного рыча га через потенциометр формируются в сизр/налы по крену, а отклонения второго рыча га через второй потенциометр в сигналы по тангажу. Сигналы датчика положения троса, пропорциональные угловым перемещениям грузового троса, по элек1рическим передаются на автопилот, которий позлействуя HQ. органы управленУ1Я вертолота, выводит его в положение, при котором грузовой трос занимает вер тика положение. В этом положении автопилот держит машину на вертикальном тросе, а в случае появления раскачки груза автопилот стабилизирует его. Затем по команде с земли летчик спускает груз в заданное место. Формула изобретения Система внешней подвески груза к вертолету,, содержащая электролебедку с тро coh4 ; и .замком-рвушкой, грузовой трос .с головкой и грузоЁымкрюком, силовой замок автоматически запирающий грузовой трос, отличающая-с я тем, что, с целью обеспечения надежной стабилизации груза э заданной точке при монтажных работах, головка троса вьшолнена из двух частей, связанных между собой сферическим подшипником, верхняя часть которой имеет бурт для крепления в силовом замке,: а нижняя - цилиндрическое утолщение, которое взаимодействует со сферическим шарниром плоского четьфехзвенного механизма, закрепленного на корпусе силового замка с помощью карданов, причем штанга,; закрепленная на одном из звеньев меха- j низма, взаимодействует с двумя рычагами i автопилотлого датчика положения троса.
Ut. 1
Вид б
Фиг.З