Изобретение относится к авиационной технике и может быть использовано при выполнении операций по транспортировке и монтажу крупногабаритных неделимых грузов.
Известно устройство для транспортирования груза вертолетами, содержащее подвесные системы вертолетов и соединенный с ними распорный элемент (патент РФ N 1663886, кл. B 64 D 1/22, 1994). Недостатком известного устройства является громоздкость конструкции по вертикали, что затрудняет точную установку груза.
Наиболее близким по технической сущности, т.е. прототипом, является устройство для транспортирования груза вертолетами, содержащее подвесные системы вертолетов и соединенный с ними распорный элемент (патент РФ N 1648020, кл. B 64 D 1/22, 1994). При использовании известного устройства для согласования осей груза с проектными отметками потребуется вращение распорного элемента вместе с грузом обоими вертолетами. Это может привести к неоправданно высоким затратам летного времени, вызванным усложнением пилотирования по переменным наземным ориентирам для обоих командиров вертолетов.
Задачей настоящего изобретения является достижение технического результата, заключающегося в возможности поворота груза по азимуту без изменения положения распорного элемента и, что особенно важно, вертолетов, что должно обеспечить снижение затрат летного времени на установку груза в заданное положение вертолетами и может исключить необходимость привлечения для монтажа груза дополнительных грузоподъемных средств.
Достижение указанного технического результата обеспечивается за счет того, что в устройстве для транспортирования груза вертолетами к средней части распорного элемента прикреплена платформа с траверсой, смонтированной на платформе с возможностью поворота вокруг вертикальной оси (т.е. по азимуту) специальным приводом, а грузозахватные приспособления прикреплены к траверсе посредством стропов.
Сущность изобретения состоит в том, что устройство для транспортирования груза вертолетами, содержащее подвесные системы вертолетов и соединенный с ними распорный элемент, согласно изобретению снабжено прикрепляемой к средней части распорного элемента платформой с механизмом для закрепления груза, содержащим дополнительно траверсу, смонтированную на платформе с возможностью вращения вокруг вертикальной оси, и привод траверсы, на концах которой прикреплены стропы с грузозахватными приспособлениями. Кроме того, привод траверсы может быть выполнен в виде барабана, прикрепленного к траверсе и на который навиты тросы, свободные концы каждого из которых запасованы на лебедки, установленные на вертолетах. Привод траверсы может быть выполнен по-другому, например электромеханическим, причем траверса может быть выполнена в виде двуплечей балки, кольца или другой формы.
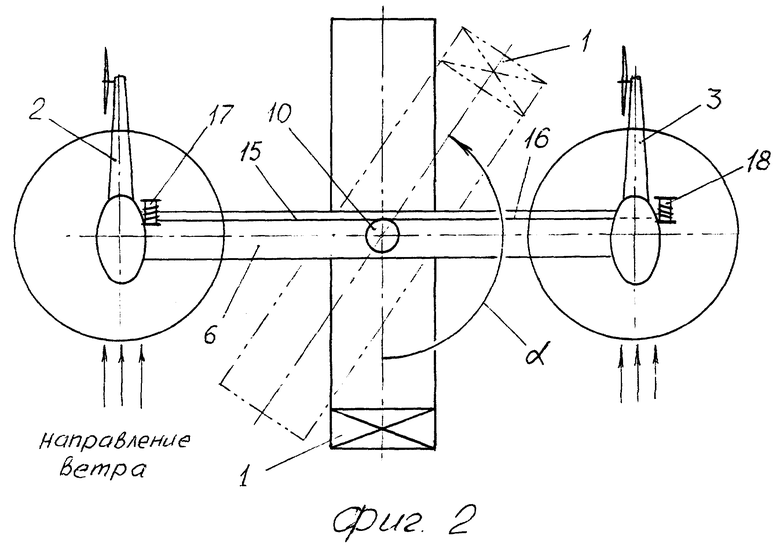
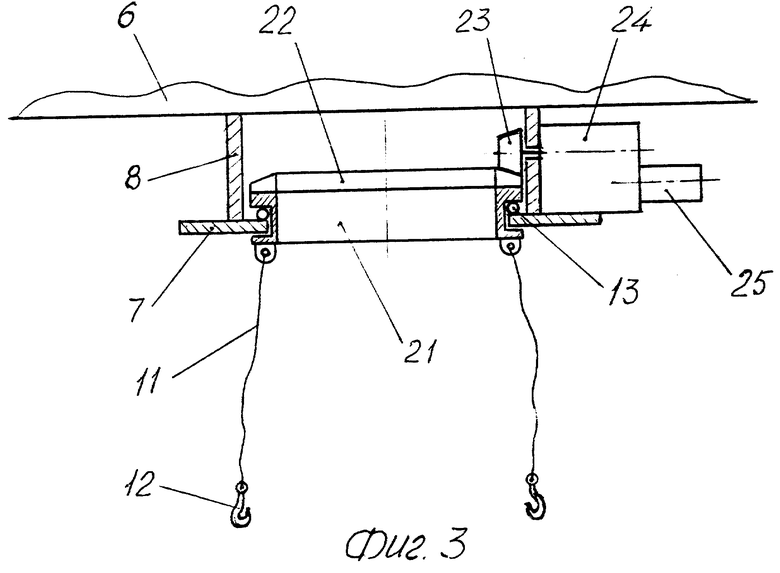
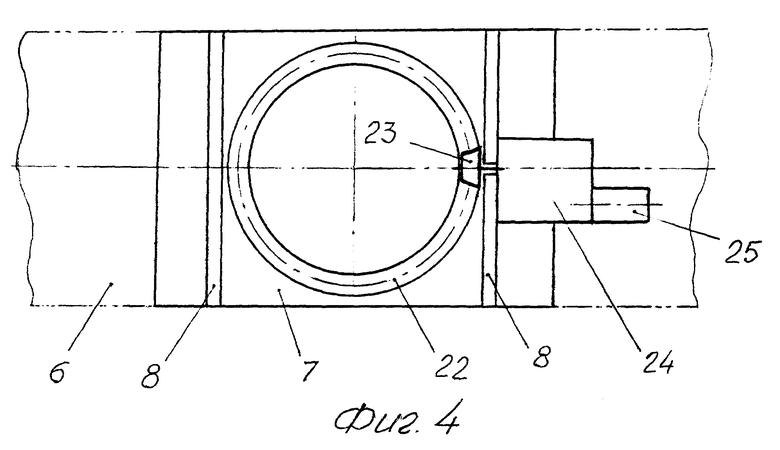
Сущность изобретения поясняется чертежами, где на фиг. 1 изображено устройство с одним из вариантов привода траверсы; на фиг. 2 - то же, вид сверху; на фиг. 3 - другой вариант привода поворота траверсы вокруг вертикальной оси; на фиг. 4 - вид сверху по фиг. 3.
Устройство для транспортирования груза вертолетами 2 и 3 содержит подвесные системы, например канаты 4 и 5, к которым присоединен распорный элемент 6. В средней части распорного элемента 6 размещена платформа 7, прикрепленная к распорному элементу посредством стоек 8 и растяжек (не показаны). На платформе 7 смонтирован механизм для закрепления груза, содержащий траверсу 9, опирающуюся на эту платформу (размещенную на ней или непосредственно под ней) с возможностью вращения вокруг вертикальной оси, и привод 10. Привод выполнен так, что в выключенном состоянии он фиксирует траверсу 9 в необходимом положении по азимуту. К концам траверсы 9 прикреплены стропы 11 с грузозахватными приспособлениями, например с крюками 12 (электрозамками, скобами и т.п.).
Привод 10 может представлять из себя барабан с вертикальной осью вращения, установленный на подшипниках 13 и на валу 14, пропущенном сквозь платформу 7. К нижнему концу вала 14 прикреплена траверса 9, которая может быть выполнена в виде двуплечей балки (как изображено на фиг. 1), H-образной, в виде замкнутой прямоугольной рамы и др. Траверса может быть выполнена в виде кольца, соединенного с барабаном 10. На барабан 10 навиты в противоположных направлениях тросы 15 и 16, концы которых запасованы на лебедки 17 и 18, обычно устанавливаемые на вертолетах для спасательных или погрузочно-разгрузочных работ. Для придания необходимого направления тросам 15 и 16 при их совместной работе с барабаном 10 на краях распорного элемента 6 установлены отклоняющие блоки 19 и 20. Для согласованного управления лебедками 17 и 18 между вертолетами 2 и 3 по канатам 4, 5 и распорному элементу 6 проложены электрокабели (не показаны).
Возможны другие варианты воплощения привода траверсы, например он может быть электромеханическим. Траверса в этом случае может быть выполнена в виде кольца 21 (см. фиг. 3 и 4), опирающегося на платформу 7 посредством подшипника 13. Кольцо 21 снабжено зубчатым венцом 22, который находится в зацеплении с шестерней 23, закрепленной на выходном валу редуктора 24, установленного на той же платформе. К выходному валу редуктора присоединен электродвигатель 25, управление которым возможно из кабины одного или обоих вертолетов 2 или 3 по электрокабелю (не показаны). К кольцу 21 присоединены стропы 11 с грузозахватными приспособлениями 12.
Работа предлагаемого устройства происходит следующим образом. При зависании вертолетов 2 и 3 над расположенным на земле распорным элементом 6 подцепляют к его краям канаты 4 и 5, соединяют быстродействующие разъемы электрокабеля. Подняв распорный элемент 6, вертолеты перемещают его к грузовой площадке, где посредством стропов 11 и грузозахватных приспособлений 12 к устройству присоединяют подготовленный к транспортированию и монтажу груз 1. После подъема груз 1 приводом 10 устанавливают в положение с минимальным аэродинамическим сопротивлением (например, располагая его продольную ось вдоль полета), в котором его транспортируют к месту установки. Заход и зависание над местом установки выполняют против ветра. При несовпадении продольной оси груза 1 с проектным направлением (например, с фундаментом) приводом 10 разворачивают груз по азимуту на необходимый угол α (см. фиг. 2). Для выполнения этой операции, например, включают лебедки 17 и 18 в противоположных направлениях или электродвигатель 25 в необходимом направлении. В случае использования лебедок 17 и 18 поворот барабана 10 и вместе с ним груза 1 на угол α против часовой стрелки достигается за счет сматывания троса 15 с барабана 10 посредством лебедки 17, включенной в режиме "на уборку". В это время лебедка 18 согласованно включается "на выпуск", и выпускаемый с нее трос 16 наматывается на барабан 10, подготавливая возможность управляемого вращения последнего в обратном направлении. При необходимости поворота груза 1 в обратном направлении (по часовой стрелке) меняют режимы работы лебедок 17, 18 или электродвигателя 25 на встречные. Добившись совпадения осей груза 1 с проектными отметками, снижением вертолетов устанавливают груз в заданное положение, после чего производят отцепку от него приспособлений 12 и полет вертолетов 2 и 3 с предлагаемым устройством на посадку.
Угол поворота груза по азимуту (α) при необходимости может достигать 180o и более при неизменном (оптимальном) направлении продольной оси каждого вертолета (против ветра) и при неизменном положении вертолетов относительно выбранных пилотами наземных ориентиров. В результате могут быть обеспечены высокая точность установки груза и минимальные затраты летного времени. Использование предложенного устройства обеспечит использование полной грузоподъемности вертолетов, а также сокращение сроков строительно-монтажных и аварийно-восстановительных работ за счет укрупнения устанавливаемых в одном полете блоков, например строительных ферм, пролетов мостов и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ВЕРТОЛЕТАМИ | 2006 |
|
RU2340513C2 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1998 |
|
RU2149803C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1995 |
|
RU2088482C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2174090C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВКИ ПО ВОЗДУХУ ТЯЖЕЛЫХ ГРУЗОВ | 2010 |
|
RU2449924C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗОВ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2176211C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2350511C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ГРУЗА | 1995 |
|
RU2087411C1 |
| СПОСОБ ВЫСОТНОГО МОНТАЖА ГРУЗА С ПОМОЩЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2162503C1 |
| СПОСОБ МОНТАЖА ПРОВОДА С ПОМОЩЬЮ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1998 |
|
RU2153748C1 |
Изобретение относится к авиационной технике, в частности к устройствам для транспортирования грузов на внешней подвеске вертолетов, и может быть использовано при выполнении операций по транспортировке и монтажу крупногабаритных неделимых грузов. Устройство содержит подвесные системы вертолетов, соединенный с ними распорный элемент, к которому в средней части прикреплена платформа с механизмом закрепления груза. Последний содержит траверсу, смонтированную на платформе с возможностью вращения вокруг вертикальной оси, и привод траверсы. Траверса может быть выполнена в виде двуплечей балки или в виде кольца. К краям траверсы прикреплены стропы с грузозахватными приспособлениями (электрозамками, крюками и т.п.). Привод траверсы может быть выполнен электромеханическим, тросовым или др. Управление приводом осуществляют из кабины одного или нескольких вертолетов. Предложенное устройство обеспечивает повороты груза в горизонтальной плоскости (по азимуту) при его установке вертолетами, что повышает точность установки и обеспечивает сокращение затрат летного времени при выполнении строительно-монтажных работ. 4 з.п.ф-лы, 4 ил.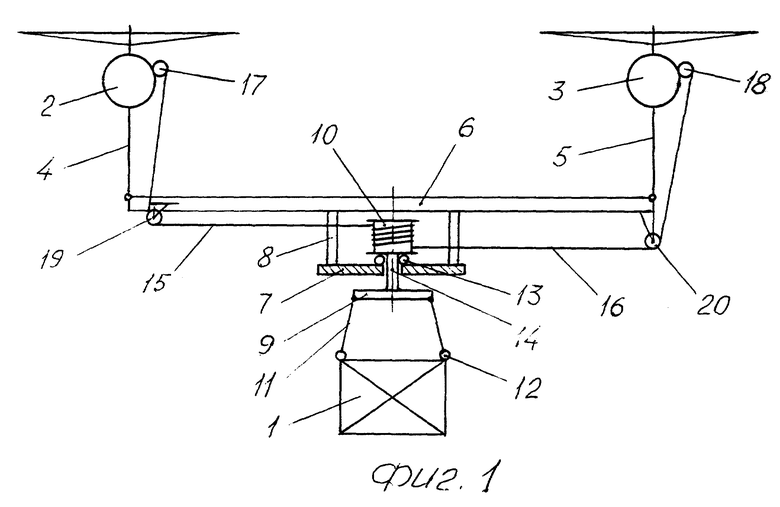
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ВЕРТОЛЕТАМИ | 1989 |
|
RU1648020C |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗА ВЕРТОЛЕТАМИ НА ВНЕШНЕЙ ПОДВЕСКЕ | 1989 |
|
RU1663886C |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗОВ ВЕРТОЛЕТАМИ НА ВНЕШНЕЙ ПОДВЕСКЕ | 1991 |
|
RU2022884C1 |
| Способ пилотирования при монтаже груза с помощью двух вертолетов | 1990 |
|
SU1763292A1 |
