Изобретение относится к устройствам для определения крена объекта.
В настоящее время в связи с увеличением объема строительства и сооружений газо-нефтепроводов, появилась необходимость в автоматизации контроля состояний различных сооружений, поэтому была разработана система, предупреждающая небольшое перемещение стационарных объектов, в результате которой можно предупредить аварию на начальной стадии.
В основу этой системы лежит датчик перемещений. В настоящее время известны датчики для измерения углов наклона с закрытым резервуаром, частично заполненным жидкостью, например с пузырьком воздуха (контроль ведется за счет изменения емкости). При использовании, например, в строительстве известные устройства обладают рядом недостатков. Жидкостные уровни чувствительны к температуре, ударам, имеют не очень удобный способ снятия показания.
Существуют датчики угла наклона с чувствительным элементом в виде маятника, снабженным контактным устройством для получения сигнала при отклонении чувствительного элемента. Однако в этих датчиках угла наклона имеются контактные устройства, которые снижают точность, надежность и уменьшают долговечность датчиков.
Известны также датчики угла наклона с бесконтактными преобразованиями, например с индуктивно - связанными катушками, включенные в цепь автогенератора (измерение основано на изменении магнитного поля). Однако такие датчики имеют небольшую чувствительность к малым углам наклона или сложны по конструкции в тяжелых производственных условиях.
Известны оптические датчики перемещений, но они сложны по конструкции и имеют низкую точность. Наиболее близок к заявленному датчик перемещений а.с. SU569852 [5] , содержащий источник и приемник света. Недостатком данного датчика является сложность по конструкции и снятию показаний.
Задачей изобретения является определение направления угла наклона, повышение надежности и долговечности устройства.
Технический результат достигается тем, что устройство для контроля перемещения содержит корпус с двумя блоками датчиков; каждый блок выполнен в виде маятника 3, на конце которого находится излучатель света 5, а на шкале находится ряд светоприемников 4, который расположен симметрично относительно маятника на некотором расстоянии.
Изобретение поясняется чертежами.
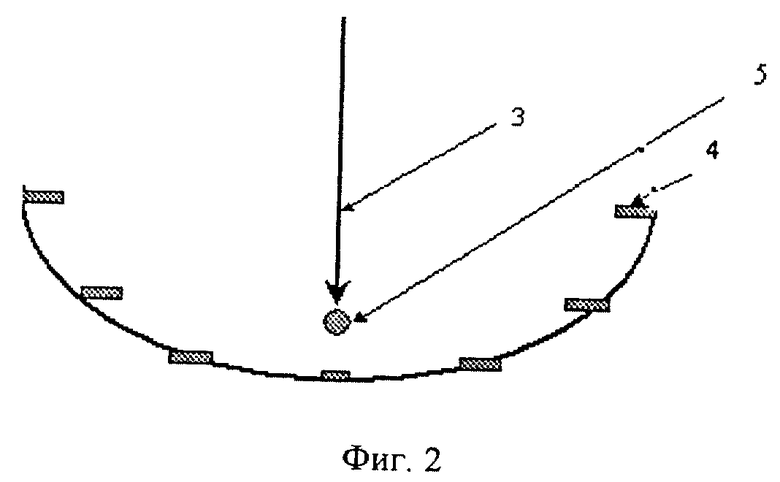
Фиг. 1 - способ крепления блоков датчиков.
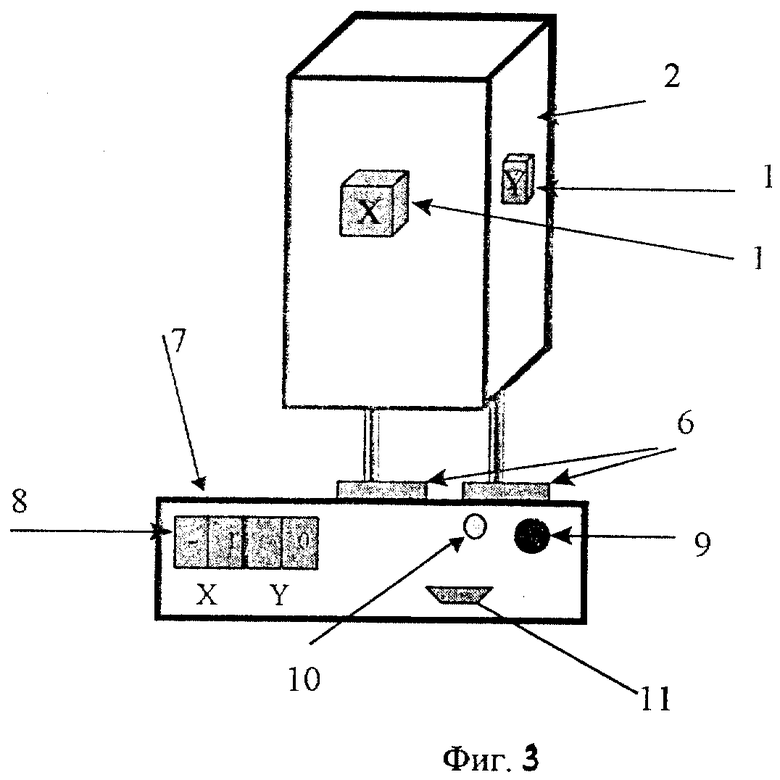
Фиг. 2 - устройство датчика.
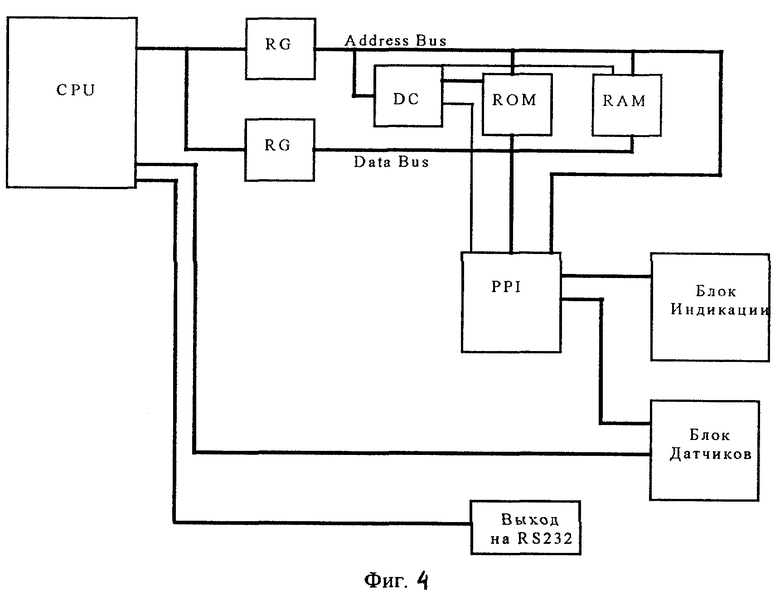
Фиг. 3 - система контроля перемещений.
Фиг. 4 - структурная схема системы.
Устройство состоит из двух блоков датчиков X1 и Y1, которые находятся перпендикулярно друг к другу, выполнены в одном корпусе и крепятся непосредственно на исследуемом объекте 2 перпендикулярно относительно друг друга (например, один измеряет по оси X, а другой по оси Y). Схема крепления датчиков показана на фиг. 1. Структура датчиков X1 и Y1 одинакова. Если исследуемый предмет 2 будет перемещаться не по осям X и Y, то, зная перемещение по оси X и Y, можно найти перемещение объекта, используя обычные геометрические формулы, например соотношения в прямоугольном треугольнике, теорема Пифагора и т.д.
Блок датчиков состоит из устройства, похожего на маятник 3. На конце его находится излучатель света 5 (светодиод, лазерный диод и т.д.), а на некотором расстоянии расположен ряд светоприемников 4 (их количество зависит от того, какая требуется точность измерения), которые равноудалены от передатчика. При перемещении маятник 3 поворачивается, тем самым, изменяя направление света светоизлучателя 5. Следовательно, появится потенциал на другом светоприемнике 4. Предлагаемая схема устройства приведена на. фиг. 2. При наличии перемещения микроконтроллер фиксирует это перемещение и передает данные через модем по СОМ-порту удаленному пользователю. Кроме того, система контроля может индицировать величину и направление перемещения.
Точность измерения будет зависеть от количества светоприемников 4 и обусловлена также технологическим классом деталей и размерами самих деталей.
Данный датчик может быть использован в системе, которая представлена на фиг. 3.
Система контроля перемещений
Система контроля перемещений включает:
1) устройство контроля перемещений 2, содержащее два блока датчиков 1;
2) систему обработки данных 7, которая содержит:
2.1) CPU - однокристальную микроЭВМ (КР1816ВЕ51);
2.2) модули памяти ОЗУ и ПЗУ (RAM и ROM);
2.3) интерфейсные блоки (PPI и RS-232);
2.4) блок индикации 8.
Рассмотрим работу системы в целом.
Сначала происходит сброс и инициализация всей системы 7. Далее осуществляется опрос устройства контроля и вывод значений с него на дисплей 8, если при этом нажата кнопка включения/выключения дисплея 9. Данные с устройства 2 поступают через порты 6 в систему обработки данных 7, где информация проверяется, и, в случае обнаружения смещения исследуемого объекта, поступает на RS232- последовательный порт 11, где при помощи модема или какого-нибудь передающего устройства передается в конечный пункт. Алгоритм обработки, хранимый в ПЗУ (ROM), может изменяться (перезаписываться) в зависимости от задачи контроля, особенностей объекта контроля, влияющих факторов и др.
Т. о. , система 7 позволяет получать информацию о величине и направлении смещения удаленного объекта.
Структурная схема системы 7 представлена на фиг. 4.
Однокристальная микроЭВМ. На нее возложена основная функция - управления всеми устройствами системы 7. Управление сбором и организацией протокола связи обеспечивает однокристальная ЭВМ К1835ВЕ51 (импорт, аналог Intel 80C51). Она может выбрать любое устройство и прочитать/записать данные из/в него. Выбор устройств (адреса) осуществляется шиной адреса (Address Bus), а обмен информацией по шине данных (Data Bus). Микроконтроллер обрабатывает поступающую в него информацию в соответствии с программой, находящейся в ПЗУ. Буферные регистры необходимы для увеличения нагрузочной способности линий микроконтроллера. ROM осуществляет функцию хранения основной программы и подпрограммы загрузки. В ОЗУ хранятся переменные, необходимые в процессе работы программы. Дешифратор подключается к шине адреса микропроцессора и в зависимости от поданного на него адреса выбирает то или иное устройство. Т. о. , дешифратор необходим для согласования работы всех устройств системы. Параллельный интерфейс используется для осуществления двух функций: индикации и опроса датчиков 1. Датчики 1 служат для контроля перемещения несущих частей. Для предупреждения опасности перемещения существует последовательный порт 11, выполненный на разъеме RS232, через который передается информация об аварийной ситуации.
Изобретение относится к устройствам для определения крена объекта. Сущность его состоит в том, что оно имеет два блока датчиков, расположенных перпендикулярно друг другу, каждый блок выполнен в виде маятника, на конце которого расположен излучатель света, а на шкале находится ряд светоприемников, расположенных симметрично относительно маятника на некотором расстоянии. Техническим результатом, достигаемым при использовании описанной конструкции, является наиболее надежное определение направления угла наклона исследуемого объекта и повышение долговечности устройства. 4 ил.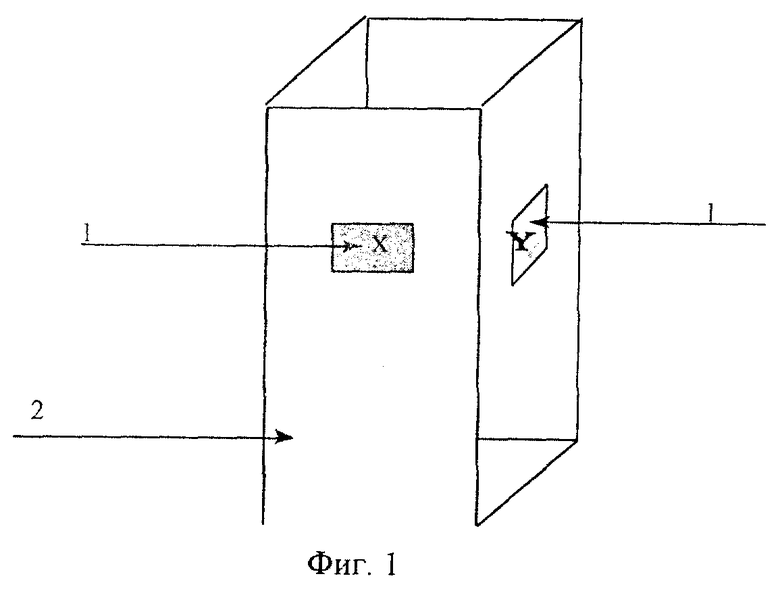
Устройство для контроля перемещений, содержащее корпус, источник и приемник света, отличающееся тем, что содержит два блока датчиков, расположенных перпендикулярно друг другу, и каждый блок выполнен в виде маятника, на конце которого расположен излучатель света, а на шкале находится ряд светоприемников, которые расположены симметрично относительно маятника на некотором расстоянии.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик углов наклона объекта | 1975 |
|
SU569852A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения перемещений | 1986 |
|
SU1397717A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE 3431989 A1, 20.03.1989 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| RU 2055309 C1, 27.02.1996 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| RU 2060455 C1, 20.05.1996 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2110046C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2087858C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Гидростатический наклономер | 1974 |
|
SU528447A1 |
