Изобретение относится к устройствам для контроля крена объекта и перемещения в пространстве с привязкой по трем координатам. С помощью описанного далее устройства также возможна фиксация точек перемещения объекта в пространстве в течение определенного промежутка времени для контроля траектории его перемещения, что может оказаться полезным для исследования влияния на его движение различных внешних воздействий и предотвращения аварийных ситуаций.
Известно устройство, измеряющее углы наклона объекта (Пат. 2234058, МПК G01C 9/00, опубл. 10.08.2004 - Устройство для определения углов наклона объекта), которое может быть использовано для определения углов наклона строительных механизмов и машин, а также при эксплуатации промышленных зданий и сооружений. Устройство содержит сферический корпус, заполненный жидкостью, с помещенным в него шаром-замыкателем и контактными поверхностями. Контактные поверхности выполнены в виде системы переплетенных между собой разомкнутых проводников, закрепленных вертикально и горизонтально на внутренней поверхности сферического корпуса.
Недостатком данного устройства является невозможность оценки угла наклона объекта только по трем направлениям и невозможность использования датчика при низких температурах.
Известно устройство для контроля линейного или углового перемещения оборудования или механизма грузоподъемной машины (Пат. 2403204, МПК G01B 7/00, опубл. 10.11.2010 - Устройство для контроля линейного или углового перемещения оборудования или механизма грузоподъемной машины), в котором осуществляется преобразование перемещения контролируемого объекта в угловое перемещение вала оптического энкодера. Это устройство позволяет с учетом полученной величины отклонения регулировать работу привода грузоподъемной машины.
Недостатком данного устройства является низкое быстродействие и аппаратная избыточность.
Известно устройство для измерения внешнего воздействия (Пат. US 20070097362 A1, опубл. 03.05.2007 - Optical displacement sensor structure with one light source, and external force detecting device incorporating the same), использующее один излучатель света и оптоволокно с тремя световодами, направляющими свет от излучателя на три оптических сенсора. Каждый сенсор содержит четыре фотодиода. При движении объекта направление света из каждого световода меняется, величина светового потока фиксируется фотодиодами.
Недостатком данного устройства является низкая надежность и ограниченный диапазон измерения.
Наиболее близким аналогом является устройство для контроля перемещений, определяющее крен объекта (Пат. 2150086, МПК G01C 9/00, опубл. 27.05.2000 - Устройство для контроля перемещений) - прототип. Данное устройство представлено двумя блоками датчиков, выполненных в виде маятника с излучателем света, а также шкалы фотоприемников, расположенной вдоль траектории движения маятника. При движении маятника сигнал излучателя света регистрируется одним из фотоприемников. По тому, какой именно фотоприемник регистрирует сигнал излучателя, определяется положение маятника (угол его отклонения от вертикального положения) в конкретный момент времени.
Это устройство отличается более высоким быстродействием и долговечностью в использовании, оно может быть применено в исследованиях стабилизации неустойчивых объектов. Недостатком данного устройства является невозможность измерения пространственных характеристик движения объекта, т.к. измеряются только характеристики движения маятника по двум координатам.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение определения параметров движения исследуемого объекта (крен, скорость, перемещение от предыдущего положения и др.) в пространстве.
Усовершенствование системы состоит в том, что излучатель света становится многоточечным и жестко соединяется с исследуемым объектом металлической штангой, а блок приемников сигнала располагается на боковой поверхности цилиндрического корпуса и представлен матрицей фотоприемников, чувствительные поверхности которых обращены внутрь корпуса.
Технический результат - определение параметров движения объекта по трем осям, а также повышение быстродействия, долговечности и надежности устройства. Достигается данный результат тем, что в конструкции устройства предусмотрены многоточечный излучатель света, жестко прикрепленный к исследуемому объекту, и блок приемников сигнала, расположенный на боковой поверхности цилиндрического корпуса и выполненный в виде матрицы фотоприемников, чувствительные поверхности которых обращены внутрь корпуса.
Изобретение дополняется чертежами, поясняющими структуру устройства: фиг. 1 - схема устройства, фиг. 2 - схема матрицы фотоприемников, фиг. 3 - функциональная схема системы.
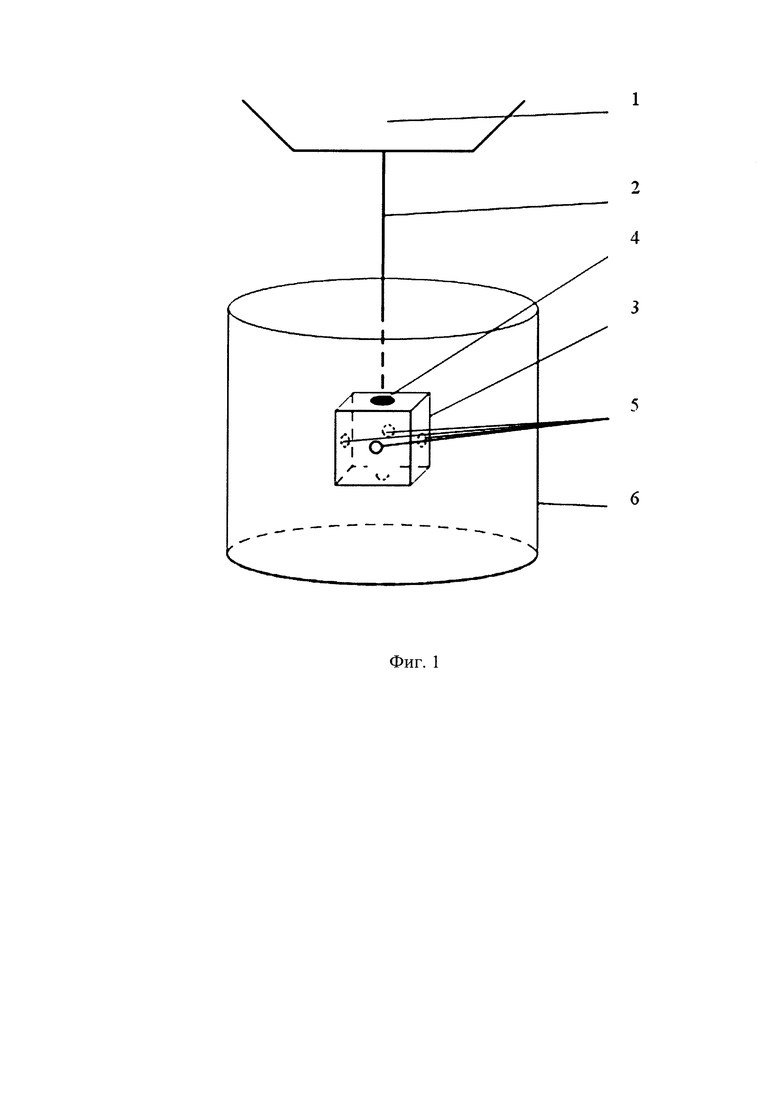
Предлагаемая схема устройства приведена на фиг. 1. Элементами устройства являются многоточечный излучатель света и блок приемников сигнала. К исследуемому объекту 1 через жесткий подвес 2 прикреплен многоточечный излучатель света 3. Точка соединения подвеса с излучателем обозначена цифрой 4. Многоточечный излучатель состоит из четырех излучателей света 5 с узкой диаграммой направленности (например, лазерных) и находится в пространстве, ограниченном цилиндрическим корпусом 6. Этот корпус содержит блок приемников сигнала - матрицу фотоприемников, расположенную на боковой поверхности цилиндрического корпуса, причем эта матрица чувствительной поверхностью обращена внутрь корпуса. Отсутствие матрицы фотоприемников на верхней грани корпуса объясняется тем, что сквозь нее проходит жесткий подвес, соединяющий исследуемый объект с многоточечным излучателем света, а на нижней грани - тем, что по координатам двух осей можно однозначно определить перемещение объекта.
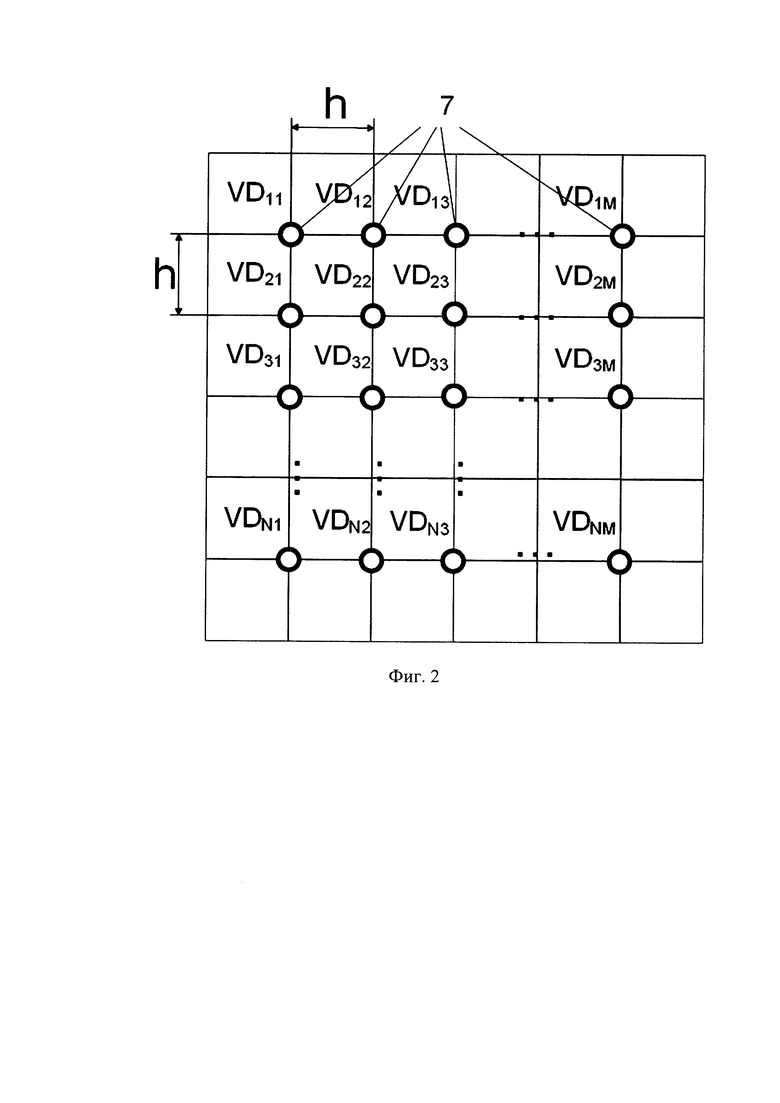
Схема расположения фотоприемников на боковой поверхности корпуса представлена на фиг. 2. Ряды фотоприемников, расположенные на внутренней боковой поверхности цилиндрического корпуса, чередуются с шагом h в вертикальном и горизонтальном направлениях. Количество фотоприемников K, обозначенных V11…VDNM, зависит от числа строк N и столбцов М матрицы. Общее число фотоприемников 7 в устройстве равно К. Оно зависит от необходимой точности измерений и вычисляется по формуле:
K=N⋅М,
где N - количество столбцов матрицы фотоприемников, М - количество строк матрицы фотоприемников.
Таким образом, данное устройство отличается наличием многоточечного излучателя света, а также тем, что блок приемников сигнала выполнен в виде матрицы фотоприемников, расположенных на внутренней боковой поверхности цилиндрического корпуса.
Данное устройство может быть применено в системе контроля перемещений, описание которой приведено далее.
Составляющие системы контроля перемещений: устройство для контроля пространственных перемещений, содержащее исследуемый объект с многоточечным излучателем света, блок приемников сигнала; два мультиплексора сигналов и микропроцессор (например, микроконтроллер Intel 8051 АН с внешней перезаписываемой памятью).
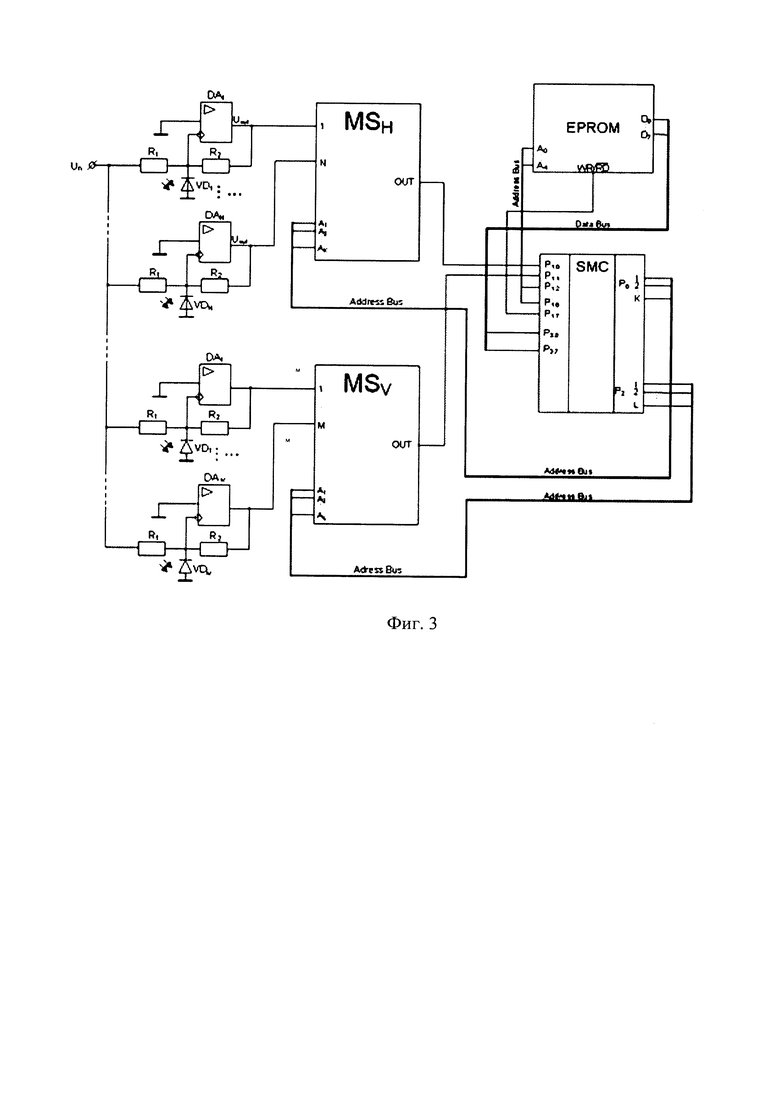
Рассмотрим работу системы. Ее функциональная схема представлена на фиг. 3. После включения питания системы происходит ее инициализация: запись начальных настроек в микропроцессор, сброс значений фотоприемников, включение излучателей света, установка начального положения исследуемого объекта. Далее системой начинается непрерывный опрос блока приемников сигнала. Сигналы с фотоприемников VD11…VDNM (фиг. 2) поступают на устройства преобразования величины тока в напряжение. Каждое такое устройство преобразует фототок одного фотоприемника в выходное напряжение Uout и содержит фотодиод VD, резисторы R1 и R2 и операционный усилитель DA. После этого сигналы с устройств преобразования по каналам 1..N (с горизонтальных рядов матрицы) и 1..М (с вертикальных рядов матрицы) поступают на мультиплексоры MSH и MSV, в которых сигналы с фотоприемников в горизонтальных и вертикальных рядах отдельно обрабатываются и передаются в микропроцессор.
На входы A1-AK и A1-AL мультиплексоров MSH и MSV по линиям адреса поступают с нулевого и второго портов микропроцессора адреса каналов, выбранных для передачи данных. С выходов OUT мультиплексоров на входы Р1.0 и Р1.1 микропроцессора по линиям данных поступают сигналы с фотоприемников и фиксируются во внешней памяти. Далее с выходов Р1.2-P1.6 микропроцессора по адресным линиям на входы А0-А4 EPROM поступают адреса ячеек, выбранных для записи данных о текущем состоянии объекта, а через линии третьего порта микропроцессора Р3.0-Р3.7 производится обмен данными с EPROM. Выход P1,7 управления записью-чтением микропроцессора соединяется с соответствующим выводом WR/RD EPROM.
Программа, хранящаяся во внутреннем ПЗУ микропроцессора, обрабатывает сигналы, поступающие с матрицы фотоприемников, и устанавливает набор фотоприемников, на которых в данный момент регистрируются сигналы излучателей света. Для точного определения перемещения многоточечного излучателя и, следовательно, исследуемого объекта применяется технология Case-Based Reasoning (CBR), или вывода на основе прецедентов. Так, прецедент можно представить в виде:
CASE=(VDi, VDj, VDk, VDl, R),
где VDi, VDj, VDk, VDl - набор фотоприемников, зарегистрировавших сигнал от первого, второго, третьего и четвертого излучателей света соответственно; R - решения (управляющие рекомендации).
Библиотека прецедентов (БП), содержащая всевозможные наборы сигналов с фотоприемников, а также соответствующие решения, формируется до ввода системы в эксплуатацию и записывается во внешнюю память.
Во время работы системы выполняется определение сходства данного прецедента с хранимыми в БП. При нахождении однозначного соответствия устанавливаются координаты положения объекта, его крена, скорости и величины перемещения от предыдущего положения и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения режима многофазной смеси в трубопроводе с использованием CBR-технологий | 2016 |
|
RU2660411C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2150086C1 |
| ДАТЧИК УГЛОВ КРЕНА И ТАНГАЖА | 2021 |
|
RU2787949C1 |
| ИНФРАКРАСНЫЙ ОПТИЧЕСКИЙ ГАЗОАНАЛИЗАТОР | 2015 |
|
RU2596035C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДОВ | 2023 |
|
RU2818406C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВЫСОКОТОЧНОГО ИЗМЕРЕНИЯ ФИЗИКО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 2007 |
|
RU2353925C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЯ СВЕТОВОЗВРАЩЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2002 |
|
RU2202814C1 |
| Инфракрасный оптический газоанализатор c автоматической температурной коррекцией | 2019 |
|
RU2710083C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| ДЕТЕКТОР ВАЛЮТ, ЦЕННЫХ БУМАГ И ДОКУМЕНТОВ | 2015 |
|
RU2577197C1 |
Изобретение относится к области контроля перемещений объектов и касается устройства для контроля пространственных перемещений. Устройство включает в себя корпус, источник и приемники света. Источник света является многоточечным, жестко связан с исследуемым объектом и находится в пространстве, ограниченном цилиндрическим корпусом. Сигналы многоточечного излучателя регистрируются матрицей фотоприемников, расположенных на боковой поверхности цилиндрического корпуса и обращенных чувствительными поверхностями внутрь корпуса. По тому, какой набор фотоприемников в данный момент регистрирует сигналы излучателя, делается вывод о текущем положении исследуемого объекта, его крене и перемещении от предыдущего положения. Анализ производится с использованием технологии вывода на основе прецедентов. Технический результат заключается в обеспечении возможности определения параметров движения по трем осям, повышении быстродействия, долговечности и надежности устройства. 3 ил.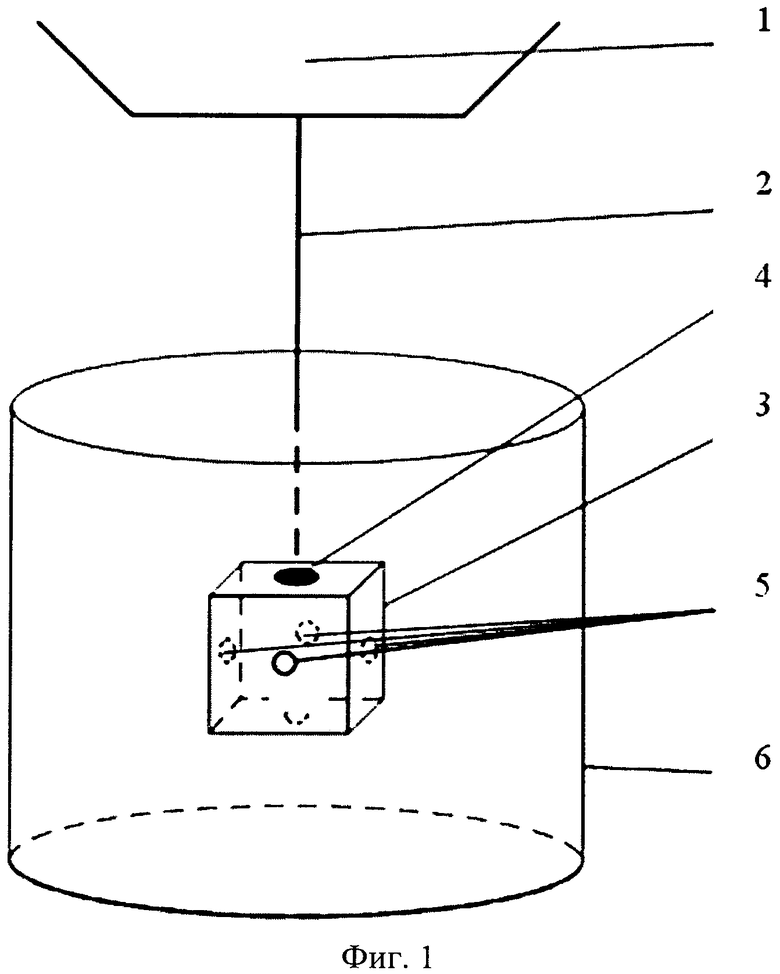
Устройство для контроля пространственных перемещений, содержащее корпус, источник и приемники света, отличающееся тем, что источник света является многоточечным, жестко связан с исследуемым объектом и находится в пространстве, ограниченном цилиндрическим корпусом, сигналы многоточечного излучателя регистрируются матрицей фотоприемников, расположенных на боковой поверхности цилиндрического корпуса и обращенных чувствительными поверхностями внутрь корпуса; по тому, какой набор фотоприемников в данный момент регистрирует сигналы излучателя, делается вывод о текущем положении исследуемого объекта, а также о его крене, перемещении от предыдущего положения с использованием технологии CBR.
| US 2007097362 A1, 03.05.2007 | |||
| ОПТИКО-МЕХАНИЧЕСКОЕ УГЛОМЕРНОЕ УСТРОЙСТВО ПОВОРОТНОГО ТИПА С ОПТИЧЕСКИМ УКАЗАТЕЛЕМ НА ОСНОВЕ МНОГОЗНАЧНОЙ МЕРЫ И ФОТОЭЛЕКТРОННЫМ РЕГИСТРАТОРОМ | 2007 |
|
RU2377498C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2150086C1 |
| US 4906846 A1, 06.03.1990. | |||

