Изобретение относится к электротехнике и может быть использовано в компрессорах с бесконтактными электрическими двигателями постоянного тока для холодильников и морозильников.
Известен герметичный компрессор с повторными циклами, в котором бесконтактный двигатель оснащен системой управления частотой (1), приспособленной для работы при любой скорости вращения двигателя. Такой компрессор вращается без перегрузки, что позволяет уменьшить рабочий шум и потребление электроэнергии.
Эта конструкция является наиболее близким техническим решением к предлагаемому изобретению в части механики и выбрана нами за прототип.
Недостатком является то, что динамического уравновешивания за счет противовеса нагрузки, действующей на вал двигателя со стороны механизма возвратно-поступательного движения можно достичь на некоторой фиксированной частоте вращения вала. При работе на других частотах возникает значительная неуравновешенность, приводящая к повышению вибраций, возрастанию шума, а также к снижению надежности компрессора.
Другой недостаток прототипа состоит в том, что при достижении заданной температуры в охлаждаемом объеме система начинает работать циклично, включая и выключая компрессор. При этом компрессор работает на пониженных оборотах, что значительно снижает холодопроизводительность. К тому же возникают необратимые потери, связанные с большими разностями температур при теплообмене.
Еще одним существенным недостатком прототипа является классическая схема применения бесколлекторного двигателя постоянного тока (БДПТ) с использованием датчиков положения ротора, что неизбежно приводит к использованию дополнительных проходных контактов в герметичном кожухе компрессора для вывода сигналов с датчиков. В результате снижается надежность.
Целью предлагаемого изобретения в части механики является устранение перечисленных выше недостатков. В частности, для устранения неуравновешенности механизма компрессора, снижения вибрации и, следовательно, шума, в конструкции предусмотрены эксцентрики механизма возвратно-поступательного движения, точки которых равноудалены от оси вращения и размещены в одной продольной плоскости, проходящей через ось вала симметрично этой оси на расстоянии вдоль вала, равном половине сумм толщины эксцентриков.
Кроме того, для устранения зависимости работы двигателя от нагрузки на поршнях компрессора введена система динамического ограничения тока, позволяющая в любой момент времени контролировать уровень потребляемого тока в цепи БДПТ и изменять его значение в любой фиксированный момент времени в зависимости от алгоритма управления под контролем схемы управления, что позволяет применять в холодильном агрегате любой тип хладагентов. Введена также схема бездатчикового управления двигателем, что позволяет повысить надежность компрессора за счет исключения датчиков положения ротора.
Также для оптимизации работы холодильного агрегата и уменьшения необратимых энергетических потерь введены датчики температуры, в зависимости от сигналов, с которых схема управления задает частоту вращения двигателя для достижения следующих условий:
(t13 - t12) ---> минимум,
(t11 - t10) ---> минимум,
где t10 - температура охлаждаемого объема в градусах, определяемая датчиком температуры 10; t11 - температура стенки испарителя в градусах, определяемая датчиком температуры 11; t12 - температура окружающей среды в градусах, определяемая датчиком температуры 12; t13 - температура стенки конденсатора в градусах, определяемая датчиком температуры 13. При выполнении указанных условий уменьшаются энергетические потери холодильного прибора. Известно, что часть потерь холодильного агрегата происходит от разницы температур между испарителем и охлаждаемым объемом, а также между конденсатором и внешней средой. И задачи оптимизации холодильного цикла состоят в том, чтобы минимизировать эту разность, какую задачу и выполняет блок управления.
Известен трехфазный вентильный двигатель с аналого-цифровым преобразователем частоты, коммутируемый по противоЭДС вращения (2), применение которого позволяет исключить датчик положения ротора. Недостатком является необходимость вывода средней точки "звезды" обмотки якоря двигателя, что ведет к использованию дополнительных проходных контактов в герметичном кожухе компрессора, что также снижает надежность компрессора.
Другим недостатком известной схемы является то, что переход от шагового режима работы к управлению по противоЭДС осуществляется дискретно по прохождению 6 импульсов с трехфазного генератора. Имеется вероятность незапуска двигателя, либо вращения в противоположную сторону.
Это изобретение выбрано за прототип в части электроники.
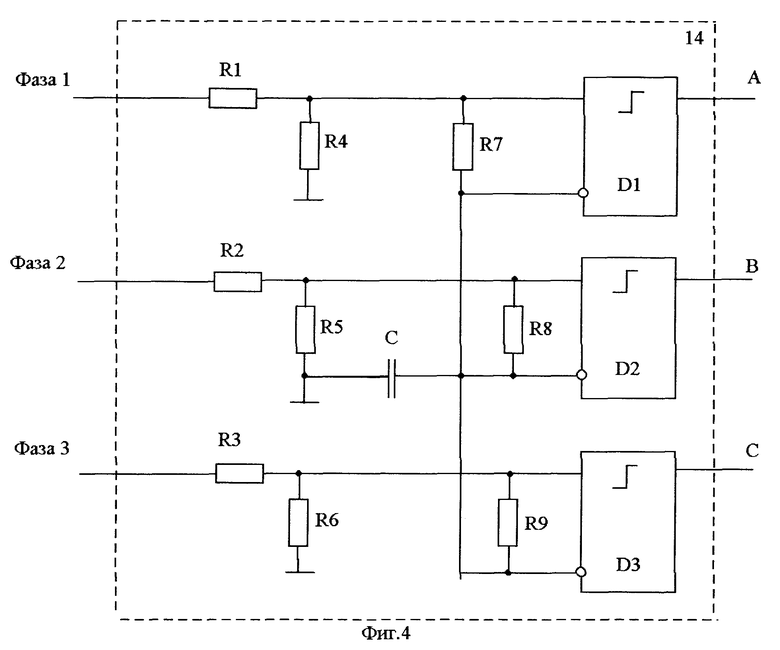
Так, исключена средняя точка "звезды" обмотки якоря путем создания искусственной средней точки в блоке компараторов и введено переключение с пошагового режима работы на управление по противоЭДС при достаточном разгоне двигателя, определяемое заданной частотой вращения.
Фиг. 1 - схема холодильного агрегата с управляемым герметичным компрессором.
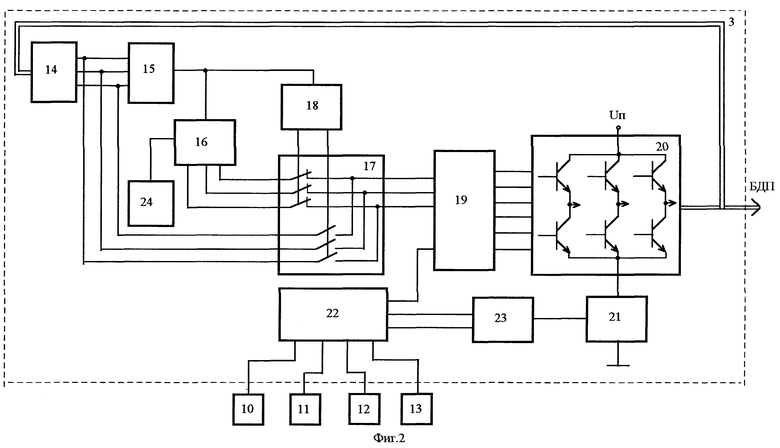
Фиг. 2 - схема электронного блока управления.
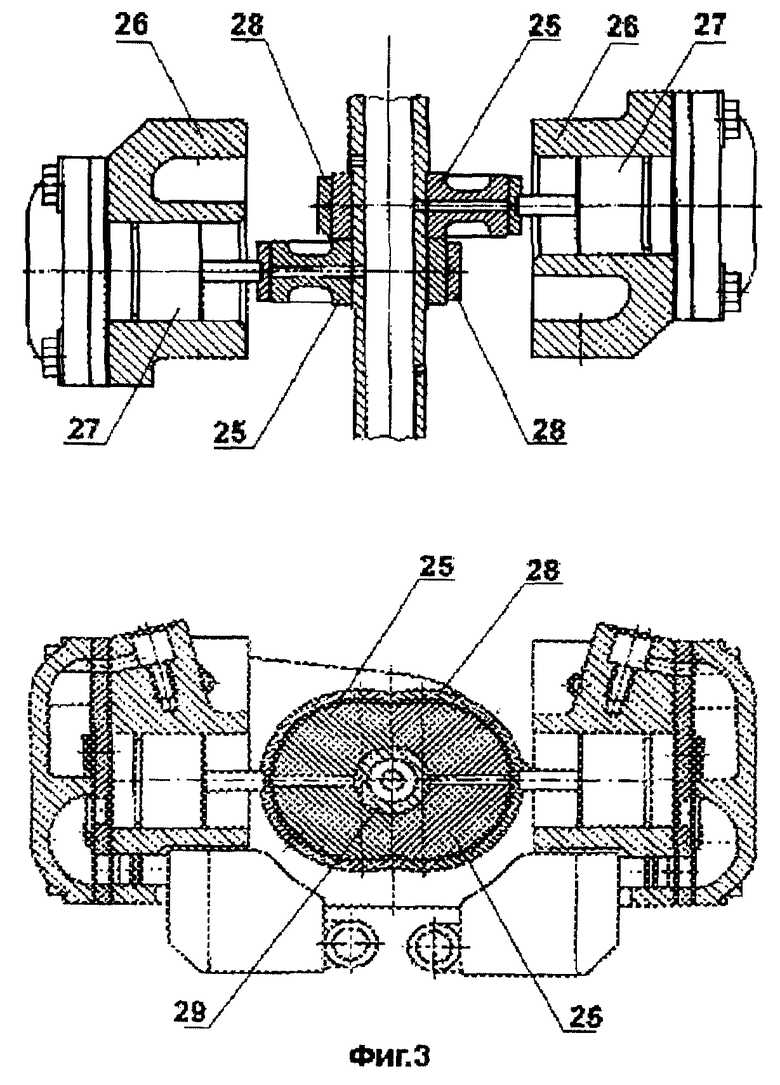
Фиг. 3 - эскиз поршневого механизма компрессора.
Фиг. 4 - пример получения искусственной средней точки обмоток фаз БДПТ.
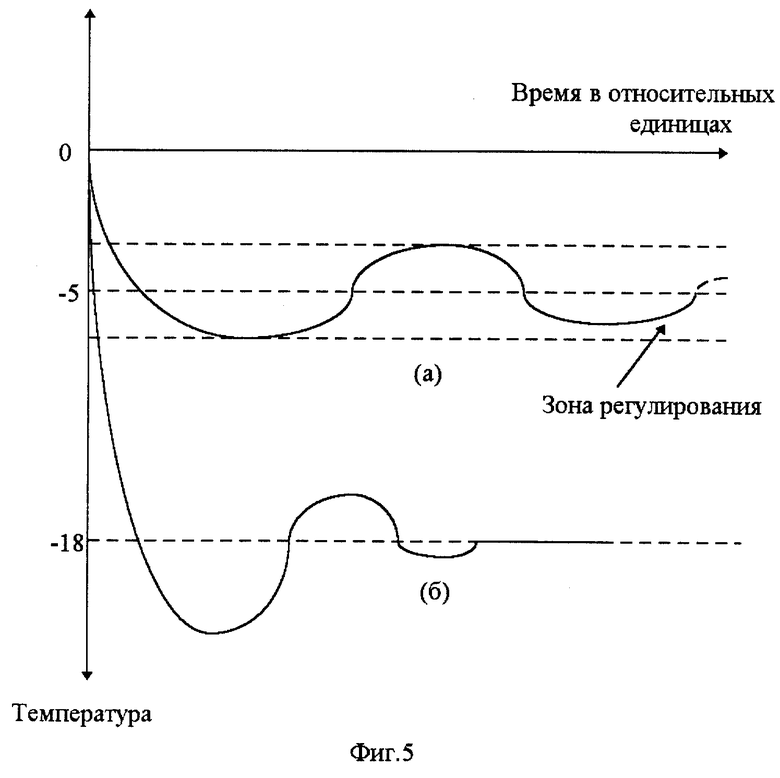
Фиг. 5 - вид температурной кривой при регулировании.
Холодильный агрегат, изображенный на фиг. 1, содержит герметичный управляемый компрессор 1, в состав которого входят БДПТ 2, оснащенный электронным блоком управления 3, испаритель 5 с дросселем 4, конденсатор 6, коллектор 7, регулируемый клапан 8, охлаждаемый объем 9, датчики температуры (охлаждаемого объема 10, испарителя 11, окружающей среды 12, конденсатора 13).
Схема, представленная на фиг. 2, получает сигналы от датчиков температуры 10 - 13 и включает в себя блок компараторов 14 (фиг. 4), схема выделения синхрочастоты 15 (2), трехфазный синхронизируемый генератор 16 (3), коммутатор 17, блок управления режимами 18 (2), формирователь закона управления 19 (2), схему управления 22, датчик тока 21 (может быть любым, в частности, резистивным с усилением сигнала до необходимой величины; вариант исполнения приведен на фиг. 5), блок инверторов 20, схему ограничения тока 23, схему приведения 24, выполненную на таймере.
Механизм компрессора показан на фиг. 3 в виде эскиза. Он содержит эксцентрики 25, цилиндры 26, поршни 27, втулки эксцентрика 28, вал 29. Выполненные в виде круглых шайб эксцентрики 25 имеют отверстия для установки на вал 29. Оси отверстий и наружных поверхностей трения "А" и "Б" в эксцентриках не совпадают на величину эксцентриситетов. Эксцентрики имеют толщины T1 и T2 и установлены на вал таким образом, что точки их поверхностей трения "А" и "Б", находящиеся в одной продольной плоскости, проходящей через ость вала, симметричны относительно оси вала и находятся на расстоянии H=(T1+T2)/2, измеряемом вдоль оси вала. Поршни 27 размещены в цилиндрах 26, находящихся по противоположные стороны от оси вала, и при вращении осуществляют встречное возвратно-поступательное движение.
За счет симметричного расположения эксцентриков механизма и максимального сближения их по направлению оси вала, обеспечивается наиболее полная динамическая балансировка частей механизма, совершающих возвратно-поступательное движение в широком диапазоне частот вращения двигателя. Уменьшение размеров механизма позволяет расширить диапазон частот вращения вала, обеспечить смазку трущихся поверхностей и повысить надежность компрессора.
На фиг. 1 представлена схема холодильного агрегата, где герметичный компрессор 1, оснащенный БДПТ, работает под управлением схемы управления 3, которая получает сигналы с датчиков температуры 10-13.
Регулирование производительности герметичного компрессора осуществляется за счет изменения частоты вращения бесконтактного электродвигателя.
На фиг. 2 представлена схема блока управления. Трехфазный генератор 16 вырабатывает код, который поступает на формирователь закона управления 19 через коммутатор 17. Формирователь закона управления 19 вырабатывает сигнал управления ключами инвертора 20. В результате через обмотки протекает ток и ротор БДПТ занимает фиксированное положение. Схема приведения 24, предназначенная для установки блока управления в начальное положение, выдает сигнал разрешения на смену кода для трехфазного генератора 16. Код поступает через коммутатор 17 на формирователь закона управления 19, после чего инвертор меняет направление тока в обмотках фаз БДПТ; ротор поворачивается.
Блок компараторов 14 обрабатывает сигналы противоЭДС и, в свою очередь, посылает сигналы на схему выделения синхрочастоты 15. Последний формирует сигнал на разрешение смены кода для трехфазного генератора.
Блок управления режимами 18 контролирует режимы работы БДПТ.
При запуске БДПТ блок управления режимами подсчитывает число импульсов с выхода схему выделения синхрочастоты 15 за определенный период времени. Как только число импульсов превысит заданный порог, что соответствует набранной скорости, блок управления режимами переключает коммутатор, включая обратную связь по положению ротора. ЭДС вращения поступает на блок компараторов 14, работающих в режиме нуль-органов. Сигнал с компараторов поступает на формирователь закона управления 19, который управляет включением очередной фазы путем анализа предыдущего такта коммутации.
Схема ограничения тока 23 сравнивает сигнал, поступающий от датчика тока 21 с уровнем, задаваемым схемой управления 22, который меняется в зависимости от алгоритма управления и выдает сигнал прерывания коммутации в случае превышения уровня тока, протекающего в обмотках двигателя над пороговым значением, установленным схемой управления. Схемотехнически схема ограничения тока представляет собой узел сравнения.
Как только ток в отключенных фазах спадает, сигнал с датчика тока уменьшается. Схема управления снимает запрещающий сигнал и коммутация возобновится.
Таким образом, регулируя ток, потребляемый двигателем, можно регулировать и потребляемую мощность. А также устраняется зависимость частоты вращения и мгновенной скорости хода поршней от нагрузки на поршни компрессора.
Схема управления 22 при изменении температуры в холодильнике вследствие изменения тепловой нагрузки, и, как следствие изменение сигналов с датчиков 10, 11 по причине теплопритоков через теплоизоляцию, а так же при открывании двери число оборотов двигателя плавно и пропорционально изменяться от минимального до максимального значения. При этом, учитывая наличие постоянных теплопритоков через теплоизоляцию холодильного шкафа, останов компрессора практически будет отсутствовать. Минимальным значением частоты вращения является величина, обеспечивающая компенсацию теплопритоков за счет работы компрессора с частотой вращения, соответствующей этому сигналу. Максимальная частота вращения, соответствующая режиму заморозки продуктов, обеспечивает и максимальную холодопроизводительность компрессора. Вид температурной кривой (б) при таком регулировании представлен на фиг. 5. При заданных температурах выше -10oC двигатель практически будет работать в 2-х позиционном режиме (пуск-остановка) в соответствии с кривой (а) на фиг. 5. В этом случае возможно так называемое "раскачивание" системы, что приводит к нарушению процесса регулирования. Соответствующие технические предусматривают реализацию выбора времени изодрома, коэффициента пропорциональности и т.д. Рассмотрим более подробно эти два характерных случая. При заданной температуре в холодильнике, например -5oC, при включении прибора и при температуре внутри холодильника, например 0oC, имеется максимальный сигнал рассогласования температур. Двигатель компрессора включается на максимальное число оборотов (максимальная холодопроизводительность). По мере приближения температуры в холодильнике к заданной, разбаланс в регуляторе будет уменьшаться, и вблизи точки заданной температуры (этот отрезок регулируется настройкой коэффициента пропорциональности регулятора) двигатель остановится. Температура по инерции (т. к. холодильник относится, согласно теории авторегулирования, к инерционному звену) будет еще какое-то время понижаться. Затем, вследствие тепловых нагрузок, температура начнет повышаться, и, дойдя до значения зоны включения двигателя, вызовет включение компрессора. При приближении к заданной температуре внутри холодильника сигнал разбаланса будет уменьшаться, и, после нескольких колебаний вокруг этого значения, интегральная составляющая регулятора с высокой степенью точности с помощью оптимального для данной нагрузки числа оборотов компрессора будет поддерживать баланс холода.
В случае, если компрессор не может обеспечить соотношение минимальной и максимальной производительностей при всем диапазоне вращения, алгоритм работы будет комбинированный: "пуск-остановка" с регулируемой частотой вращения в режиме работы.
БИБЛИОГРАФИЧЕСКИЕ ДАННЫЕ ИСТОЧНИКОВ ИНФОРМАЦИИ
1. Патент США N 5282723, МКИ: F 04 B 49/06, 1994 г.
2. РЖ ВИНИТИ, 21, 1996, 1К64, ВЕСТИ, МЭИ.-1995, N 2. С. 55-59, 113.
3. Патент СССР N 1658307A1, МКИ: H 02 K 29/06, P 6/02, 1988 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЯСКА ИНВАЛИДНАЯ САМОДВИЖУЩАЯСЯ | 1998 |
|
RU2149620C1 |
| СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2256576C2 |
| ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД | 2005 |
|
RU2289189C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354036C1 |
| РОТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2000 |
|
RU2175162C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404504C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455748C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ ТЕКУЧИХ СРЕД, ДАТЧИК ВЯЗКОСТИ И СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОДОВ ТАХОМЕТРА ДАТЧИКА ВЯЗКОСТИ | 1998 |
|
RU2152022C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2651812C2 |
| Способ управления вентильным двигателем и следящая система для его осуществления | 2017 |
|
RU2649306C1 |
Изобретение может быть использовано в компрессорах с бесконтактными электрическими двигателями постоянного тока для холодильников и морозильников. В электронный блок управления бесколлекторного двигателя постоянного тока введено устройство управления по противоЭДС. В конструкцию введены дополнительно датчики температуры охлаждаемого объема, окружающей среды и конденсатора. В зависимости от информации, полученной от датчиков, регулируется частота вращения бесколлекторного двигателя. Для устранения зависимости работы двигателя от нагрузки на поршень компрессора введена система динамического ограничения тока. Такое выполнение обеспечивает повышение производительности за счет уменьшения необратимых потерь холодильного прибора, устранение резонансных шумов, повышение надежности. 3 з.п. ф-лы, 5 ил.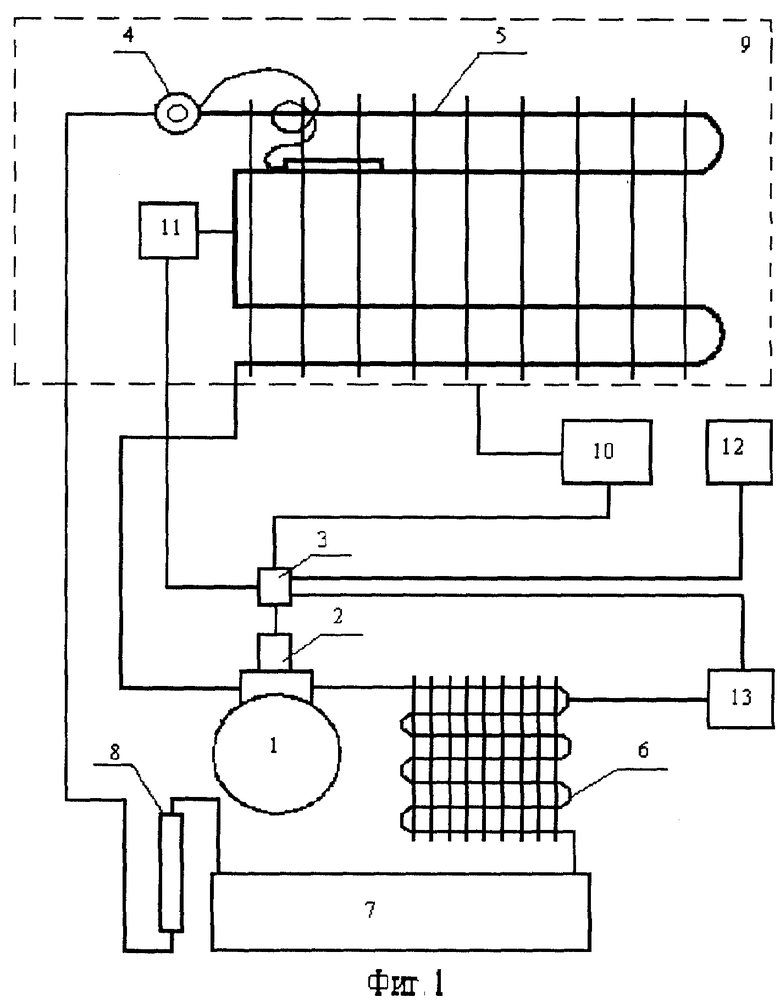
| US 5282723 A1, 01.02.1994 | |||
| Способ регулирования производительности поршневой многоцилиндровой компрессорной установки и устройство для его осуществления | 1987 |
|
SU1569427A1 |
| Способ регулирования производительности холодильной машины | 1981 |
|
SU985644A1 |
| Способ регулирования производительности компрессора холодильной машины | 1980 |
|
SU879203A2 |
| Огнетушитель | 0 |
|
SU91A1 |

