Изобретение относится к области безрельсового транспорта и может быть использовано для перемещения инвалидов или роботов-манипуляторов по горизонтальной поверхности в стесненных условиях.
В существующих конструкциях самодвижущихся колясок для привода колес используют, как правило, коллекторные двигатели постоянного тока, имеющие ограниченный ресурс работы, особенно в режиме частого включения под нагрузкой, по причине высоких пусковых токов. К тому же коллектор требует периодической чистки и замены щеток. Для управления направлением движения используют два двигателя (по одному на каждое ведущее колесо с левой и правой стороны коляски) [1] . Обычно система управления включает пульт кнопочного управления, недостатком которого является быстрое изнашивание из-за частого употребления.
Изменение скорости осуществляют, как правило, с помощью реостатов или мощных транзисторов, которые вводят в цепь питания двигателя. В результате увеличивается расход энергии аккумуляторной батареи (на нагрев).
В качестве прототипа авторы изобретения выбрали инвалидную коляску с автоматизированным электроприводом и микропроцессорным управлением, разработанную в Новочеркасском государственном техническом университете [2]. Существенными недостатками ее являются наличие цепной передачи, отсутствие тормозов, применение для управления двигателем переменных резисторов.
Целью предлагаемого изобретения является создание надежного, долговечного, бесшумного, безопасного, не требующего профилактического обслуживания транспортного средства для инвалидов.
Авторы предлагают коляску с электроприводом, включающим два мотор-редуктора на базе бесколлекторных двигателей постоянного тока (БДПТ), снабженных электромагнитным тормозом.
Коляска инвалидная самодвижущаяся содержит кресло, оснащенное двумя ведомыми колесами и двумя ведущими колесами, пульт управления с рукояткой, электропривод ведущих колес, состоящий из подключенных через коммутаторы двигателей, аккумуляторную батарею, связанную со вторичным источником питания, который подключен к устройству управления, и датчик, механически сочлененный с рукояткой управления, на которой находится кнопка. В отличие от ближайшего аналога ее ведущие колеса непосредственно установлены на мотор-редукторы, дополнительно снабженные электромагнитными тормозами, подключенными к аккумуляторной батарее через кнопку, находящуюся на рукоятке управления.
В частных случаях своего выполнения коляска может содержать дополнительно введенное устройство для отключения ведущих колес от мотор-редукторов; бесконтактный аналоговый индуктивный датчик, использованный в качестве датчика, механически сочлененного с рукояткой управления; бесконтактные двигатели постоянного тока, использованные в качестве электродвигателей электропривода.
На чертеже изображена функциональная схема электрического привода для управления коляской, которая является объектом настоящего изобретения.
Два мотора-редуктора 1 и 2 включают БДПТ 3 и 4, редуктор 5 и 6 и электромагнитный тормоз 7 и 8. Электромагнитный тормоз 7 и 8 осуществляет экстренную остановку коляски при отпускании кнопки 9, находящейся на рукоятке управления 10. При этом устройство управления 11 выключает двигатели 3, 4 мотор-редукторов 1, 2, запитанные через коммутаторы 12 и 13. Бесконтактный индуктивный датчик 14 механически сочленен с рукояткой управления 10, имеющей две степени свободы с нейтралью. Устройство управления 11 контролирует скорость и направление вращения ведущих колес 15 и 16, закрепленных на осях мотор-редукторов через коммутаторы 12 и 13.
Электронные коммутаторы 12 и 13 осуществляют питание двигателей 3 и 4 импульсным током. Вторичный источник питания 17 преобразует напряжение аккумуляторной батареи 18 в напряжение, необходимое для работы устройства управления 11.
В коляске предусмотрена возможность передвижения без электропривода. Для этого ведущие колеса 15, 16 с помощью устройства 19, 20, оснащенного рычагом, отключаются от мотор-редукторов 1, 2.
По сравнению с коллекторными двигателями БДПТ обладают гораздо более высоким ресурсом работы и целым рядом других преимуществ. К ним относятся:
1. Эффективное элеткродинамическое торможение и рекуперация при уменьшении скорости движения.
2. Бесшумность работы.
3. Стабилизация скорости движения коляски и возможность преодоления препятствий на малых скоростях с максимальной мощностью двигателя за счет обратной связи с использованием датчика положения ротора.
Библиографические данные источников информации
1. Патентная заявка Германии B 4139533, 5 A 61 G 5/04.
2. Ковалев С.В., Василенко В.И. Инвалидная коляска с автоматизированным электроприводом и микропроцессорным управлением. Известия высших учебных заведений. Электромеханика. - 1996, N 1-2, с. 108 и 109.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 1992 |
|
RU2022824C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| ГЕРМЕТИЧНЫЙ КОМПРЕССОР С РЕГУЛИРУЕМОЙ ХОЛОДОПРОИЗВОДИТЕЛЬНОСТЬЮ | 1997 |
|
RU2151326C1 |
| КОЛЯСКА ИНВАЛИДНАЯ САМОДВИЖУЩАЯСЯ | 1998 |
|
RU2150928C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 2015 |
|
RU2606218C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |
| СРЕДСТВО ПЕРЕДВИЖЕНИЯ | 2005 |
|
RU2286121C1 |
| МИКРОАВТОМОБИЛЬ | 1998 |
|
RU2185990C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВОДА ИНВАЛИДНОГО КРЕСЛА-КОЛЯСКИ | 1995 |
|
RU2116774C1 |
| Устройство для подъёма и спуска людей с ограниченными возможностями в ходьбе по лестничным маршам | 2020 |
|
RU2727984C1 |
Изобретение относится к области безрельсового транспорта и может быть использовано для перемещения инвалидов или роботов-манипуляторов на горизонтальной поверхности в естественных условиях. Кресло коляски оснащено двумя ведомыми и двумя ведущими колесами. Ведущие колеса имеют электропривод. Электропривод состоит из подключенных через коммутаторы двигателей. Аккумуляторная батарея связана с вторичным источником питания, который подключен к устройству управления и к датчику. Датчик механически сочленен с рукояткой управления с кнопкой. Ведущие колеса непосредственно установлены на мотор-редукторы, дополнительно снабженные электромагнитными тормозами. Тормоза подключены к аккумуляторной батарее через кнопку, находящуюся на рукоятке управления. В результате создано надежное, долговечное, бесшумное, безопасное, не требующее профилактического обслуживания транспортное средство для инвалидов. 3 з.п. ф-лы, 1 ил.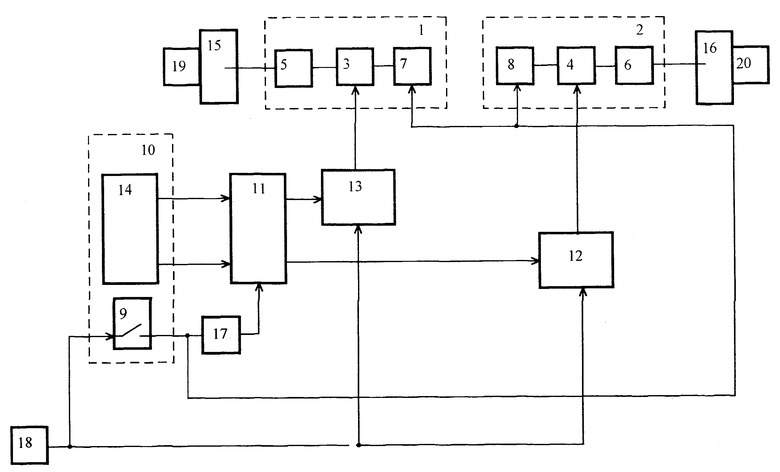
| Ковалев С.В | |||
| и др | |||
| Инвалидная коляска с автомотизированным электроприводом и микропроцессорным управлением | |||
| В.: Известия высших учебных заведений | |||
| Электромеханика | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Автокресло | 1988 |
|
SU1680164A1 |
| Кресло-коляска | 1978 |
|
SU776610A1 |

