Изобретение относится к устройствам измерения вязкости текучих сред, имеющим датчик вязкости ротационного типа. Изобретение предназначено для измерения с повышенной точностью вязкости ньютоновских и вязкопластических сред незначительных объемов, температура и давление которых варьируются в значительных по величине диапазонах.
Известна система измерения вязкости текучих сред, которая снабжена цифровым преобразователем, селектором импульсов, логическим устройством, электронным ключом, формирующим устройством и логической переключающей схемой, причем вход преобразователя через селектор импульсов подключен к выходу логического устройства сравнения частот, выход логического устройства сравнения частот через электронный ключ соединен с обмоткой якоря электродвигателя внутреннего воспринимающего цилиндра датчика измерения вязкости. При этом на валу цилиндра закреплен дискретный датчик числа оборотов вала, который через формирующее устройство и дискретное устройство коррекции подключен к одному из входов логического устройства сравнения частот, второй вход которого подсоединен к выходу логической переключающей схемы (SU N 1276957, МКИ G 01 N 11/14, 1986).
Известные системы для измерения вязкости жидкости при высоком давлении и температуре с использованием датчика ротационного типа, так же как и описанная выше, являются достаточно сложными и как следствие обладают высокой себестоимостью, а также имеют ограниченный диапазон измерений и измерительную камеру большого объема и не обладают достаточной точностью, чтобы удовлетворить нужды потребителей.
Задачей, на решение которой направлено изобретение "Устройство для измерения вязкости текучих сред", является создание портативного и недорогого устройства, посредством которого вязкость текучих сред, в частности жидкостей, определяется по измеряемой с высокой точностью частоте вращения ротора датчика вязкости и заданной с высокой точностью величине вращающего момента на роторе. Техническим результатом изобретения является повышение точности измерений до 0,1-0,5% в диапазоне вязкостей от 0,01 сП до 30 П для жидкостей, которые могут находиться при давлении 500 МПа и более, температуре от 0 до 160oC и более, а рабочий объем измерительной камеры ротационного датчика вязкости при этом не превышает 1,5 мл.
Для достижения указанного выше технического результата в известном устройстве для измерения вязкости текучих сред, содержащем датчик вязкости, выполненный на базе асинхронного электродвигателя и имеющий измерительную камеру, причем выход датчика вязкости подсоединен ко входу блока формирования информационного сигнала, а измерительная камера сообщена через входной канал с насосом высокого давления, в датчик вязкости введен тахометр, ротор которого жестко связан с ротором асинхронного двигателя и которые расположены в измерительной камере датчика вязкости, блок формирования информационного сигнала выполнен по схеме моста переменного тока, плечи которого выполнены идентичными и каждое из которых состоит из соединенных последовательно резистора и конденсатора переменной емкости, образованного электродами статора и по меньшей мере одним полюсом ротора тахометра, который через конденсатор постоянной емкости, образованный поверхностью ротора асинхронного двигателя и стенкой корпуса датчика вязкости, связан с одним из полюсов питающего моста генератора, другой полюс которого гальванически связан с общей точкой резисторов разных плеч моста переменного тока, при этом другие концы резисторов подсоединены ко входам фазочувствительного преобразователя.
Возможны дополнительные варианты выполнения изобретения, в которых целесообразно, чтобы
- генератор был подсоединен к резисторам через потенциометр;
- генератор был выполнен регулируемым по частоте и амплитуде выходного сигнала;
- блок формирования информационного сигнала был снабжен последовательно соединенными фильтром низкой частоты и усилителем, при этом вход фильтра низкой частоты связан с выходом фазочувствительного преобразователя;
- устройство было снабжено системой терморегулирования, выполненной в виде термостата, сообщенного с камерой терморегулирования, выполненной в корпусе датчика вязкости, цифровым мультиметром, к сигнальным входам которого подсоединен усилитель блока формирования, датчик давления, гидравлически связанный с насосом высокого давления, и датчик температуры текучей среды в измерительной камере, при этом выходы цифрового мультиметра связаны с регулируемым источником питания статора асинхронного двигателя, насосом высокого давления и термостатом с возможностью управления соответственно частотой вращения ротора асинхронного двигателя, давлением и температурой текучей среды в измерительной камере.
Известен ротационный вискозиметр, в котором внутри герметичной трубы на опорах установлен ротор с закрепленным на нем ведомым магнитом, вращающий момент на который передается с помощью ведущего магнита, установленного на валу электромеханического привода. Частота вращения ведущего магнита, в устоявшемся движении равная частоте вращения ведомого магнита, измеряется датчиком с переменным магнитным сопротивлением. При этом действие вязкого трения на ротор приводит к сдвигу на малый угол ведомого магнита относительно ведущего. Для измерения этого угла имеется второй датчик с переменным магнитным сопротивлением, работающий от ферромагнитного элемента, установленного на роторе. Разность фаз между сигналами, генерируемыми обоими датчиками, прямо пропорциональна вязкости (US N 4499753, МПК G 01 N 11/14, 1985).
Недостатком такого ротационного вискозиметра является недопустимость значительного рассогласования полюсов ведущего и ведомого магнитов, что сужает диапазон измерений, вынуждая или менять частоту вращения вала электромеханического привода, или подбирать ведущий и ведомый магниты в зависимости от диапазона значений вязкости измеряемой жидкости.
Кроме того, датчик с переменным магнитным сопротивлением, работающий от ферромагнитного элемента, во избежаниe магнитного тяжения требует значительного удаления от ведущего и ведомого магнитов, что приводит к увеличению объема камеры, заполненной измеряемой жидкостью и, следовательно, количества самой жидкости.
Известен также датчик вязкости, содержащий корпус с измерительной камерой, асинхронный двигатель, статор которого расположен в корпусе, а ротор расположен в измерительной камере и установлен на опорах, при этом измерительная камера сообщена с входным и выходным каналами. Статор асинхронного двигателя расположен в корпусе с внешней стороны трубопровода и отделен от полости с жидкостью стенкой корпуса. В известном датчике, взятом за прототип, о величине вязкости судят по мощности, которую потребляет статор (SU N 135691, MПК G 01 N 11/14, 1960).
Недостатком такого датчика является отсутствие конкретной информации о частоте вращения ротора, что не позволяет производить точную калибровку датчика вязкости. Кроме того, используемые подшипники обладают повышенным моментом трения, влияние нестабильности которого на величину потребляемой мощности невозможно отделить от влияния изменения вязкости жидкости.
Другим недостатком известного вискозиметра является также то, что непосредственный контакт стенки корпуса со статором приводит к появлению погрешностей в измерениях из-за деформации статора при изменении давления в трубопроводе.
Задачей, на решение которой направлено изобретение, является разработка датчика вязкости, обладающего высокой точностью измерения вязкости текучих сред малых объемов в широком диапазоне изменения температур и давлений.
Для достижения указанного выше технического результата в известном датчике вязкости, содержащем корпус с измерительной камерой, асинхронный двигатель, ротор которого установлен в опорах и расположен в измерительной камере, которая сообщена с входным и выходным каналами, корпус выполнен в виде трех частей, центральной и двух боковых, в центральной части корпуса размещены камера терморегулирования упомянутой системы терморегулирования и статор асинхронного двигателя, а в боковых частях корпуса - опоры ротора упомянутого двигателя, при этом ротор тахометра жестко и гальванически соединен с ротором асинхронного двигателя и расположен в центральной части корпуса, а упомянутые опоры выполнены с возможностью электроизоляции ротора от корпуса.
Возможны дополнительные варианты выполнения изобретения, в которых целесообразно, чтобы
- статор тахометра был выполнен в виде по меньшей мере двух гальванически изолированных друг от друга электродов, расположенных напротив его ротора, выполненного по меньшей мере c одним полюсом, расположенным с возможностью образования с электродами конденсаторов переменной емкости, модулируемых полюсом при вращении ротора;
- центральная и боковые части корпуса были выполнены из химически инертного немагнитного материала с низкой электропроводностью;
- ротор асинхронного двигателя был выполнен из химически инертного немагнитного материала, обладающего малой плотностью и высокой электропроводностью;
- при выполнении ротора тахометра с двумя и более полюсами угловой размер каждого из них был выполнен равным угловому размеру промежутков между ними;
- каждый электрод был выполнен в виде двух групп пластин, при этом пластины каждой группы гальванически соединены между собой;
- промежутки между полюсами ротора были заполнены диэлектрическим материалом с возможностью образования цилиндрической формы.
Известен способ изготовления электродов тахометра, заключающийся в изготовлении механическим путем пластин и закреплении их на диэлектрической поверхности статора тахометра, при этом пластины по группам гальванически соединены между собой.
Изготовление статора тахометра известным способом - технологически сложно и не обеспечивает требований к уровню погрешностей геометрии деталей, что существенно снижает точность датчика в целом.
Задачей, на решение которой направлено изобретение "Способ изготовления электродов тахометра", предназначенного для датчика измерения вязкости, является повышение точности и технологичности изготовления статора тахометра, а также сокращение его размеров и веса, что при эксплуатации датчика способствуют повышению точности измерения вязкости текучих сред, особенно в случаях их малых объемов.
Для решения указанной выше задачи с получением отмеченного технического результата в известном способе изготовления электродов тахометра, заключающемся в выполнении на статоре электродов в форме гребенок, зубья одной из которых расположены в промежутках между зубьями другой, электроды выполнены в виде фольги, которую закрепляют на полимерной пленке, покрывают участки поверхности фольги, соответствующие форме электродов, химически защитным слоем, затем методом травления обрабатывают поверхность пленки с закрепленной на ней фольгой и удаляют продукты травления, после этого электроды изолируют путем наклеивания на них термическим методом пленки из герметичного диэлектрического материала, затем двухслойную пленку с электродами сворачивают для получения цилиндрической формы статора тахометра.
Возможны дополнительные варианты выполнения изобретения, в которых целесообразно, чтобы
- граничные участки пленки после образования цилиндрической формы статора были соединены между собой;
- граничные участки пленки были соединены между собой с перекрытием или встык;
- в качестве диэлектрического материала использовать полимерные компаунды.
На фиг. 1 изображена принципиальная электрическая схема устройства измерения вязкости текучих сред.
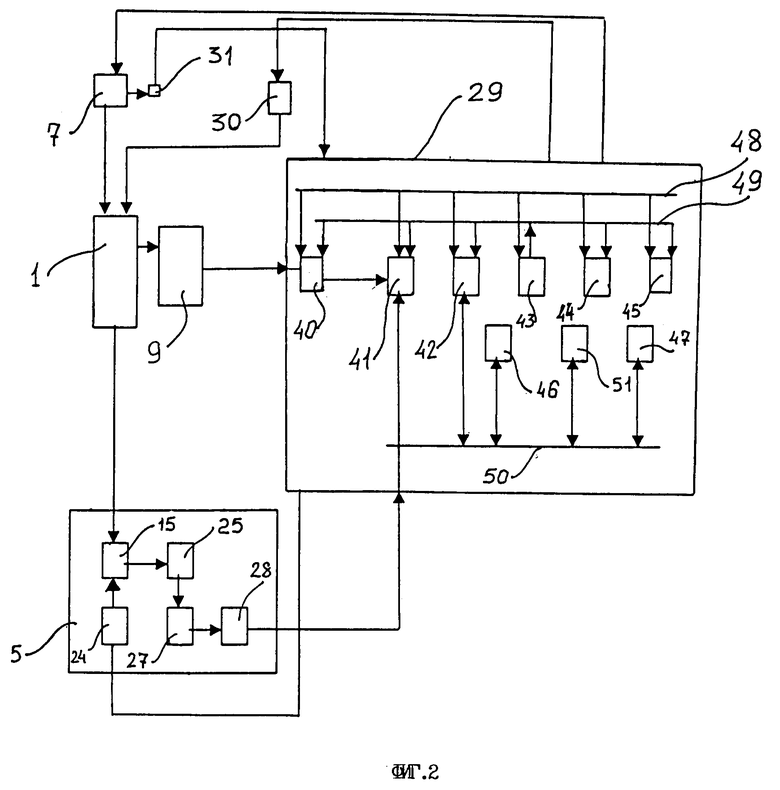
На фиг. 2 - функциональная схема частного случая выполнения цифрового мультиметра, предназначенного для обработки выходного сигнала устройства измерения вязкости текучих сред.
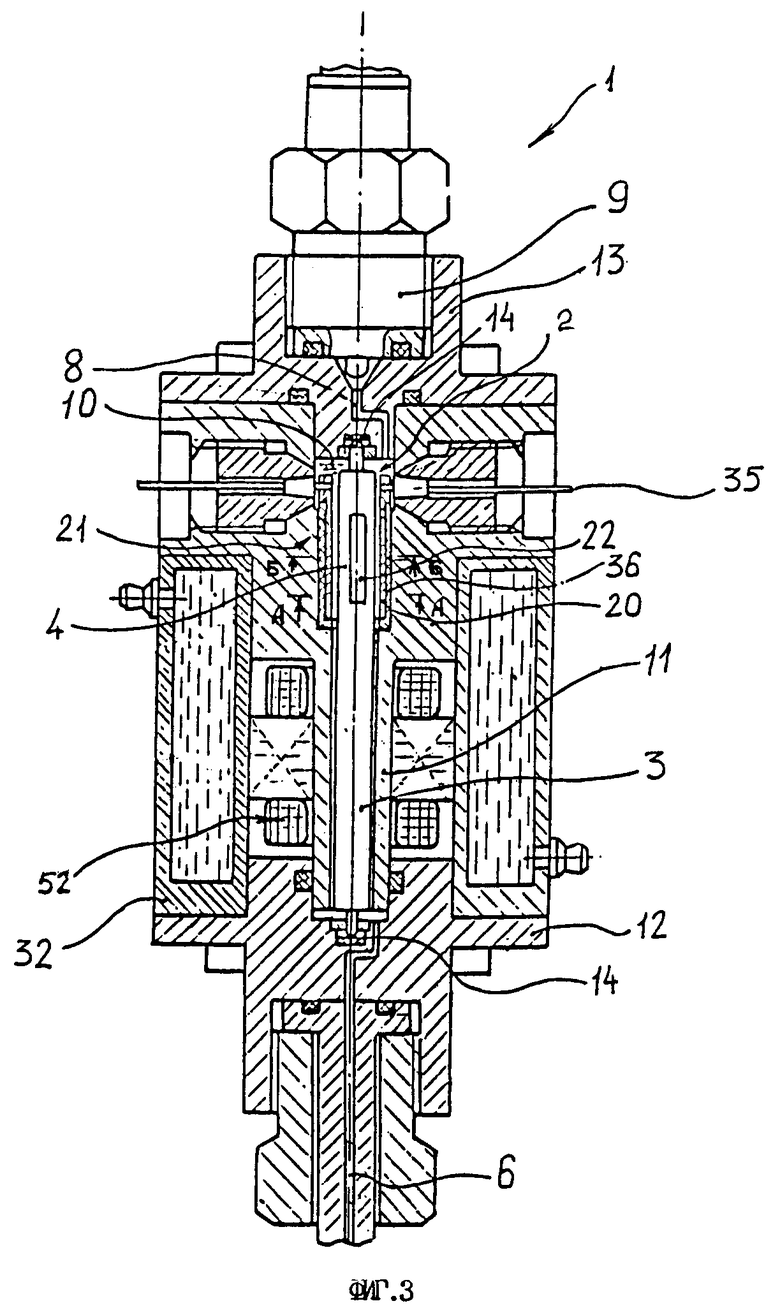
На фиг. 3 - продольный разрез датчика измерения вязкости текучих сред.
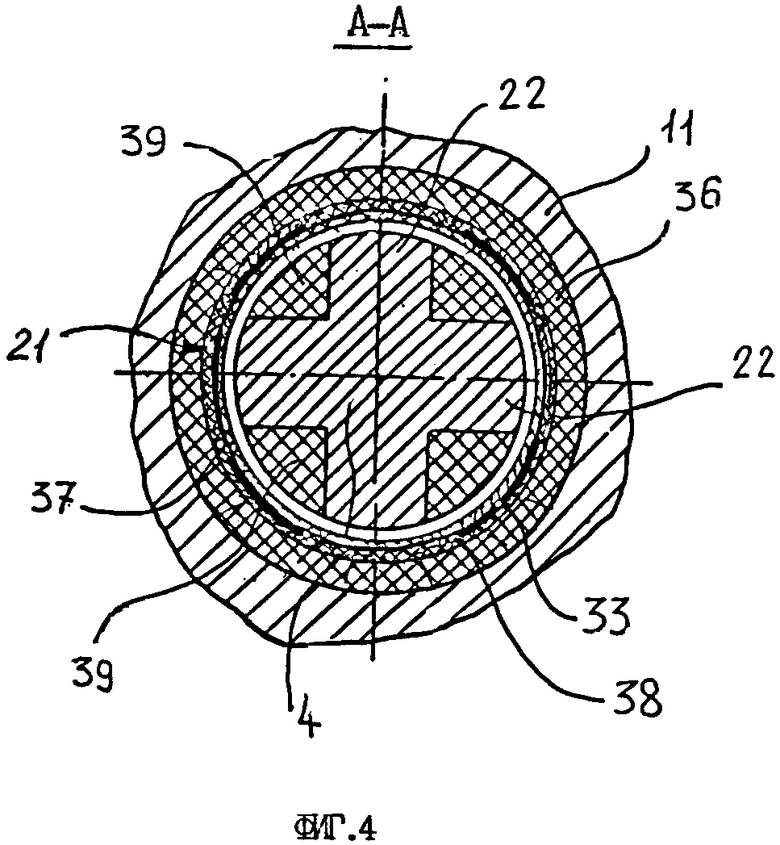
На фиг. 4 - разрез А-А по фиг. 3.
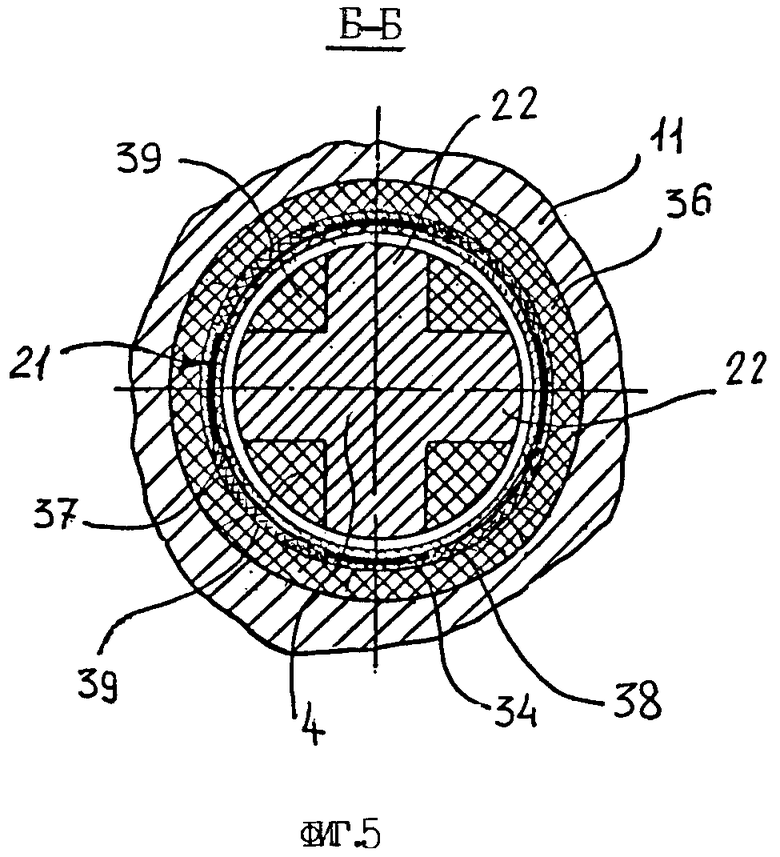
На фиг. 5 - разрез Б-Б по фиг. 3.
Устройство для измерения вязкости текучих сред, в частности жидкости, содержит датчик 1 вязкости (фиг. 1,3,4,5), выполненный с измерительной камерой 2, внутри которой расположен ротор 3 асинхронного электродвигателя, жестко и гальванически соединенный с ротором 4 тахометра.
Выход датчика 1 соединен с блоком 5 формирования информационного сигнала, характеризующего вязкость исследуемой жидкости, а измерительная камера 2 сообщена входным каналом 6 с насосом 7 высокого давления, а выходным каналом 8 - с датчиком 9 температуры исследуемой жидкости 10 в измерительной камере 2.
Корпус датчика 1 (фиг. 3) состоит их трех частей - центральной 11 и двух боковых 12 и 13, в которых расположены входной 6 и выходной 8 каналы. Все части корпуса выполнены из химически инертного немагнитного материала с низкой электропроводностью. Это позволило повысить химическую стойкость измерительной камеры 2 к химически агрессивным средам. В боковых частях 12, 13 корпуса размещены опоры 14 ротора 3 асинхронного двигателя, расположенного в центральной части 11. С целью повышения точности за счет уменьшения влияния нестабильности момента трения в качестве опоры 14 используют камневые опоры или прецизионные радиально-упорные подшипники.
В центральной части 11 (фиг. 3, 4) корпуса внутри измерительной камеры 2 размещен статор 21 тахометра, ротор 4 которого жестко и гальванически соединен с ротором 3 асинхронного двигателя, образуя единую деталь. Статор асинхронного двигателя расположен в центральной части 11 корпуса с возможностью схватывания ротора 3.
Блок 5 формирования информационного сигнала выполнен по схеме моста 15 переменного тока, плечи которого выполнены идентичными и имеют конденсаторы 16, 17 переменной емкости и резисторы 18, 19. Конденсаторы переменной емкости 16, 17 образованы электродами 20 статора 21 тахометра и по меньшей мере одним полюсом 22 ротора 4 тахометра, который через конденсатор 23 постоянной емкости, образованный поверхностью ротора 3 асинхронного двигателя и стенкой центральной части 11 корпуса датчика 1 вязкости, связан с одним из полюсов питающего моста генератора 24, другой полюс которого гальванически связан с общей точкой резисторов 18 и 19 разных плеч моста переменного тока, при этом другие концы резисторов 18, 19 подсоединены ко входам фазочувствительного преобразователя 25.
Генератор 24 может быть выполнен регулируемым и подсоединен к концам резисторов 18, 19 через потенциометр 26.
К выходу фазочувствительного преобразователя 25 последовательно подсоединены фильтр 27 низкой частоты и усилитель 28. Сигнал с усилителя 28 поступает на сигнальный вход цифрового мультиметра 29, выполненного с тремя выходами, связанными с асинхронным двигателем, насосом 7 высокого давления и термостатом 30 с возможностью управления соответственно частотой вращения ротора 3 асинхронного двигателя, давлением и температурой текучей среды в измерительной камере 2. Для измерения давления и температуры применены датчик 31 давления и датчик 9 температуры текучей среды в измерительной камере 2.
Датчик 1 вязкости оборудован системой терморегулирования, имеющей термостат 30, сообщенный с камерой 32 терморегулирования с теплоносителем. Камера 32 терморегулирования расположена в центральной части 11 корпуса и предназначена для поддержания стабильной температуры в измерительной камере 2. Регулирование температуры исследуемой жидкости осуществляется посредством термостата 30 по сигналам датчика 9 температуры в измерительной камере 2 для обеспечения заданной для замера температуры исследуемой жидкости. В качестве термостата 30 может быть использован, например, циркуляционный термостат фирмы Petrotest Instruments GmbH & Co KG, который доводит температуру исследуемой жидкости до заданной величины Т. При этом датчик 9 температуры используется в качестве обратной связи, отслеживает реальную температуру Тr исследуемой жидкости, которая сравнивается термостатом 30 с заданной температурой Т, что приводит к изменению температуры теплоносителя в камере 32 терморегулирования до соответствующей температуры Тconst которая и обеспечивает заданную температуру Т исследуемой жидкости 10.
Статор 21 тахометра выполнен в виде по меньшей мере двух гальванически изолированных друг от друга электродов 20, расположенных напротив ротора 4 тахометра, выполненного по меньшей мере с одним полюсом 22. Ротор 4 тахометра расположен с возможностью образования с электродами 20 переменных емкостей конденсаторов 16 и 17, модулируемых полюсом 22 при вращении ротора 4 тахометра.
При выполнении ротора 4 тахометра с двумя и более полюсами 22 угловой размер каждого из них выполнен равным угловому размеру промежутков между ними.
С целью увеличения частоты модуляции, а также для сокращения осевых габаритов измерительной камеры 2 электроды 20 (фиг. 4) выполнены в виде групп электродных пластин 33, 34, гальванически соединенных между собой в каждой группе. При этом количество полюсов 22 на роторе 4 тахометра выполнено равным количеству пластин в группе. Электроды 20 своими контактами связаны с вводами 35, которые герметично установлены в центральной части 11 корпуса.
На фиг. 4 приведен поперечный разрез варианта выполнения центральной части 11 корпуса датчика 1, в расточке которого установлена изолирующая втулка 36.
Места соединения электродных пластин 33, 34 с контактами герметичных вводов 35 высокого давления и эти вводы изолируют диэлектрическим материалом, в качестве которого могут быть использованы полимерные компаунды.
Электродные пластины 33, 34 изготовлены по форме гребенок, зубья одних из которых расположены относительно зубьев других гребенок со смещением вдоль оси ротора с возможностью формирования при взаимодействии с его полюсами информационных емкостей дифференциального типа.
Согласно изобретению электроды тахометра изготавливают следующим образом. Электроды 20 (фиг. 4, 5) выполняют в виде фольги, которую закрепляют на полимерной пленке 37, покрывают поверхность электродов химически защитным слоем, затем методом травления обрабатывают поверхность пленки 37 с закрепленной на ней фольгой, после этого электроды изолируют путем наклеивания на них термическим методом пленки 38 из герметичного диэлектрического материала. Затем склеенные между собой пленки с электродами сворачивают для получения цилиндрической формы статора 21 тахометра и устанавливают во втулку 36.
Граничные участки пленок после образования цилиндрической формы статора соединяют между собой, при этом участки соединяют встык или с перекрытием.
На фиг. 4 показан разрез ротора 4 тахометра, содержащего четыре полюса 22, промежутки между которыми заполнены диэлектрическим компаундом 39 с возможностью образования цилиндрической формы, соответствующей форме ротора 4, расположенного с зазором внутри статора 21, выполненного описанным выше способом.
Такое решение позволяет повысить точность измерения за счет уменьшения влияния гидравлических потерь на вихреобразование.
Такая система создает возможность измерения вязкости исследуемой жидкости при высоких температурах и давлении в рабочей камере незначительного объема.
На фиг. 2 приведена функциональная схема частного случая выполнения цифрового мультиметра 29, который содержит комбинированный измеритель "вольтметр-амперметр" 40, входное устройство 41, аналого-цифровой преобразователь 42, оперативное запоминающее устройство 43, микропроцессор 44, индикаторную панель 45, постоянное запоминающее устройство 46, клавиатуру управления 47, шину управления 48, шину адресов 49, шину данных 50 и интерфейс 51.
Цифровой мультиметр 29 со встроенным микропроцессором 44 представляет собой универсальное многофункциональное измерительное устройство, позволяющее определять и контролировать параметры электрических сигналов, поступающих на его сигнальные входы от датчиков температуры 9 и давления 31. Кроме того, в соответствии с результатами измерения и контроля параметров указанных входных сигналов цифровой мультиметр 29 может устанавливать и изменять по заданной программе режимы работы устройства.
Входное устройство 41 предназначено для преобразования входных сигналов в адекватные им электрические сигналы стандартные по своему виду и диапазону вариации значений.
Аналого-цифровой преобразователь 42 совместно с оперативным запоминающим устройством 43 осуществляет квантование и дискретизацию непрерывных входных сигналов, поступающих на его вход с выхода входного устройства 41, реализуя обращение аналоговых электрических входных сигналов в цифровой код.
Микропроцессор 44 предназначен для выполнения автокалибровки питающих напряжений и измерительных средств устройства, автоматической установки пределов измерения контролируемых параметров, для управления процессом измерения вязкости исследуемой жидкости по заданной программе, статистической обработки данных измерения вязкости жидкости (определения по известному алгоритму среднего значения измеряемой величины, ее дисперсии и среднеквадратического отклонения и т.д.), управления процессом визуализации и регистрации полученных данных, обмена информационными потоками с внешними устройствами, диагностики функциональных блоков.
Индикаторная панель 45 предназначена для цифровой индикации полученных данных о вязкости испытуемой жидкости, а также для отображения букв и слов, информирующих оператора о порядке его дальнейших действий.
Постоянное запоминающее устройство 46 предназначено для хранения постоянных и видоизменяемых программ.
Клавиатура управления 47 предназначена для введения программы работы в постоянное запоминающее устройство 46 на языке символических обозначений.
Интерфейс 51 предназначен для сопряжения всех блоков, входящих в цифровой мультиметр 29, а также его линий связи: шины управления 48, шины адресов 49 и шины данных 50, которая служит для трансляции результатов производимых измерений.
Датчик вязкости работает следующим образом.
В соответствии с программой, хранящейся в запоминающем устройстве цифрового мультиметра 29, через интервал времени t после подачи электрического питания все средства устройства оказываются подготовленными к штатной работе в режиме непрерывного измерения вязкости жидкости 10. Регулируемый насос 7 высокого давления и термостат 30 обеспечивают заданное давление P и температуру T жидкости 10 в измерительной камере 2.
Генератор 24 высокой частоты, запитывает мост 15 переменным синусоидальным напряжением частотой порядка 10 кГц.
К моменту времени t при заданном давлении P и температуре Т частота f вращения ротора 4 тахометра в исследуемой жидкости 10 стабилизируется. Стабилизация частоты f обозначает, что тарированный вращающий момент, приложенный к ротору 3 со стороны статора 52 асинхронного двигателя, оказывается уравновешенным тормозящим моментом, действующим на его ротор, который складывается из момента трения в опорах и момента сил вязкого трения, порождаемого исследуемой жидкостью 10 на данной частоте вращения ротора 4. Величина момента трения в опорах учитывается по результатам калибровки ротационного датчика, и при этом условии частоту f вращения ротора 4 можно считать обратно пропорциональной вязкости исследуемой жидкости 10.
Измерение частоты f вращения ротора 4 тахометра осуществляется с помощью блока формирования информационного сигнала (фиг. 1), выполненного на базе измерительного моста 15 переменного тока, фазочувствительного преобразователя 25 и фильтра 27 низкой частоты. Это производится следующим образом. Взаимодействие полюсов 22 с электродами 20 при вращении ротора 4 тахометра приводит к гармонической модуляции с той же частотой nf емкостей конденсаторов 16 и 17, где n - число полюсов 22 ротора 4 тахометра. Конденсаторы переменной емкости 16 и 17 образованы соответственно электродами 20, взаимодействующими с полюсами 22. Модуляция переменных емкостей конденсаторов 16 и 17 происходит в противофазе. Сигнал, являющийся следствием модуляции переменных емкостей конденсаторов 18 и 19, подается на вход фазочувствительного преобразователя 25, с выхода которого продетектированный гармонический электрический сигнал с частотой nf через фильтр низкой частоты 27 подается на вход усилителя 28 постоянного тока. С выхода усилителя 28 постоянного тока усиленный сигнал частоты nf поступает на входное устройство 41 цифрового мультиметра 29. Входное устройство 41 мультиметра 29 преобразует эти сигналы в адекватные им электрические сигналы, нормальные по своему виду, т.е. такие сигналы, амплитуда которых постоянна и не зависит от относительной диэлектрической проницаемости жидкости 10. Нормализованные сигналы поступают на вход аналого-цифрового преобразователя 42 мультиметра 29. Аналого-цифровой преобразователь 42 совместно с оперативным запоминающим устройством 43 осуществляет квантование и дискретизацию непрерывных входных сигналов, поступающих на их входы от входного устройства 41, реализуя обращение аналоговых электрических входных сигналов в цифровой код. В результате на вход микропроцессора 44 цифрового мультиметра 29 поступают электрические сигналы в виде повторяющихся кодов - групп равноразмерных импульсов высокой образцовой частоты.
Продолжительность каждого кода tк, измеряемая подсчетом числа входящих в него временных меток, обратно пропорциональна частоте f и прямо пропорциональна вязкости исследуемой жидкости 10.
Величина вязкости η вычисляется микропроцессором 44 в соответствии со следующим соотношением:
η = ηoJ
где Jф 2 - действующее в каждой фазе значение тока, питающего статор 4 тахометра, задаваемое микропроцессором, а ηo - паспортизуемая для каждого датчика 1 постоянная, которая определяется в результате его калибровки.
Полученные таким образом данные о параметре исследуемой жидкости 10 могут быть дополнены результатами их статистической обработки. Причем вся информация в целом или частично при необходимости может быть представлена в цифровой форме на индикаторной панели 45, а также зарегистрирована оперативным запоминающим устройством 43 и постоянным запоминающим устройством 46.
Погрешности типа дрейфа нуля и нестабильность масштабного коэффициента минимизируются в результате использования операции калибровки.
Прецизионная калибровка, учитывающая, в частности, влияние геометрических параметров датчика 1, а также влияние трения в опорах 14 ротора 3 асинхронного двигателя, осуществляется на основании соотношения (1) путем автономного измерения известной вязкости какой-либо жидкости, для которой коэффициент вязкости при определенных давлении и температуре известен с требуемой точностью.
Высокий уровень точности обеспечивается прежде всего применением в датчике малошумящих изоляционных опор 14 в виде камней или прецизионных радиально-упорных подшипников в изоляционной обойме для подвеса ротора 3 асинхронного двигателя, выполненного за одно целое с ротором 4 тахометра, а также сведением измерения частоты f вращения ротора 4 тахометра к особо точному типу измерений - цифровому измерению интервалов времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ВЯЗКОСТИ | 2006 |
|
RU2331866C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ НЕЛИНЕЙНО-ВЯЗКИХ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2500997C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕБИТА НЕФТЯНОЙ СКВАЖИНЫ | 2007 |
|
RU2354825C2 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
| Способ измерения вязкости | 1979 |
|
SU842481A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| Ротационный электровискозиметр | 1982 |
|
SU1055995A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ | 2002 |
|
RU2315974C2 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
Изобретение относится к устройствам измерения вязкости текучих сред, имеющим датчик вязкости ротационного типа. Изобретение предназначено для измерения с повышенной точностью вязкости ньютоновских и вязкопластических сред незначительных объемов, температура и давление которых варьируются в значительных по величине диапазонах. Устройство содержит датчик вязкости, выполненный на базе асинхронного двигателя, и тахометр, роторы которых связаны между собой и расположены в измерительной камере датчика вязкости. Блок формирования информационного сигнала выполнен по схеме моста переменного тока, плечи которого выполнены идентичными и каждое из которых состоит из соединенных последовательно резистора и конденсатора переменной емкости. При этом конденсаторы переменной емкости образованы электродами статора тахометра и по меньшей мере одним полюсом его ротора, который через конденсатор постоянной емкости, образованный поверхностью ротора асинхронного двигателя и стенкой корпуса датчика вязкости, связан с одним из полюсов питающего моста генератора. Другой полюс питающего моста генератора гальванически связан с общей точкой резисторов разных плеч моста переменного тока, другие концы резисторов подсоединены ко входам фазочувствительного преобразователя. Корпус датчика выполнен в виде трех частей, центральной и двух боковых. В боковых частях корпуса размещены опоры ротора асинхронного двигателя, расположенного в центральной части корпуса, при этом ротор тахометра расположен в центральной части корпуса. Другой особенностью изобретения является технология изготовления электродов тахометра. Обеспечено повышение точности измерений вязкости текучих сред малых объемов в широком диапазоне измерения температур и давлений. 3 с. и 13 з.п.ф-лы, 5 ил.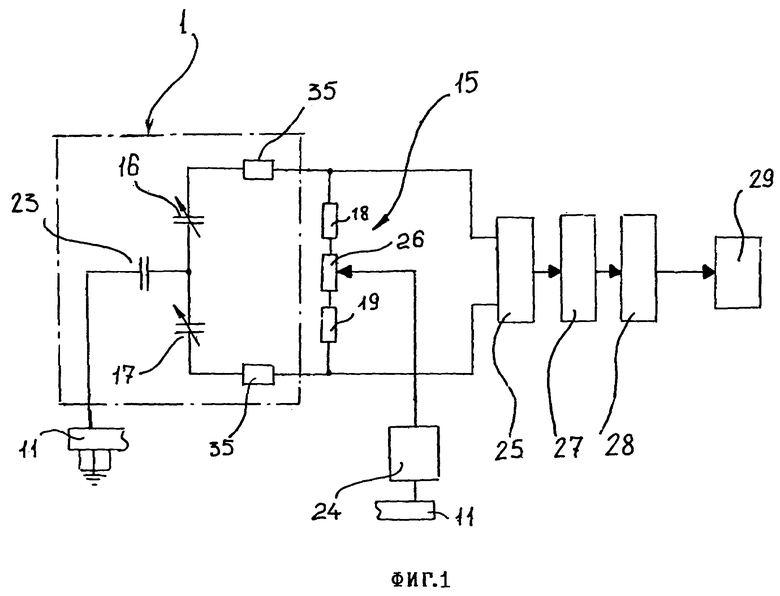
| Ротационный электровискозиметр | 1984 |
|
SU1276957A1 |
| Ротационный вискозиметр | 1985 |
|
SU1290145A1 |
| Ротационный вискозиметр | 1988 |
|
SU1627919A1 |
| Ротационный вискозиметр | 1960 |
|
SU135691A1 |
| Тахометр | 1976 |
|
SU555346A1 |
| US 5167143 А, 01.12.1992 | |||
| US 4499753 А, 19.02.1985 | |||
| US 5777212, 07.07.1998. | |||

